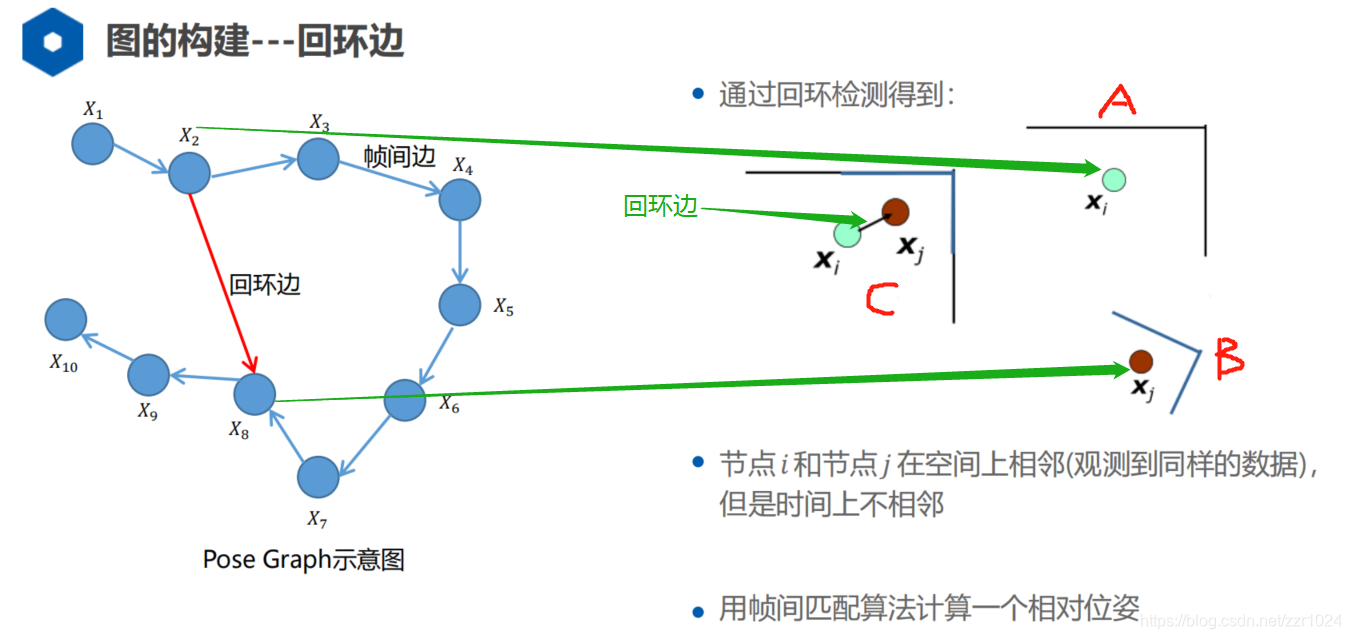
前两节已经详细讲解了左扰动的推导方式,本节来看下右扰动的推导,另外右扰动的方式,也被GTSAM中Between Factor所采用,待理论推导后,再来展示相关代码部分,接下来继续沿用之前的图来说明问题
所谓右扰动,即扰动项放在待求量的右边,上节基础部分已展示,这里不再重复。
一. 问题描述
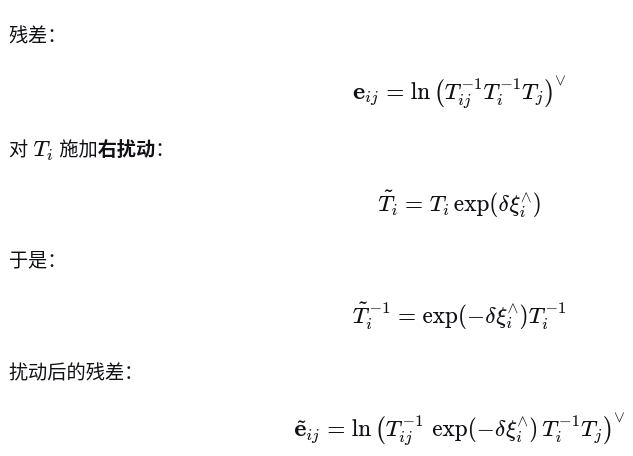
1.1 对i时刻位姿施加右扰动
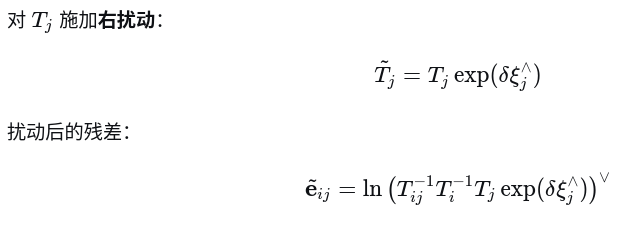
1.2 对j时刻位姿施加右扰动
二. 雅可比推导
3.1 先对i时刻求导
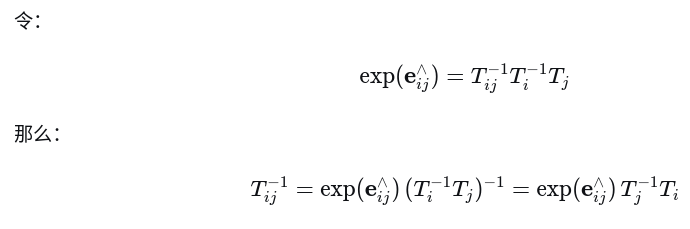
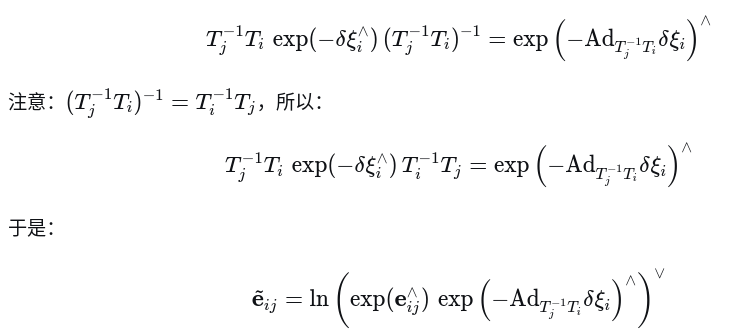
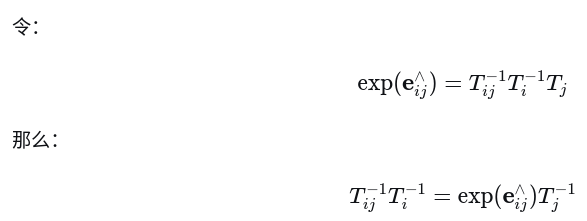
(1) 用指数表示原始残差
 (2) 代入扰动后的残差
(2) 代入扰动后的残差

(3) 利用伴随性质
(4) 应用 BCH 公式
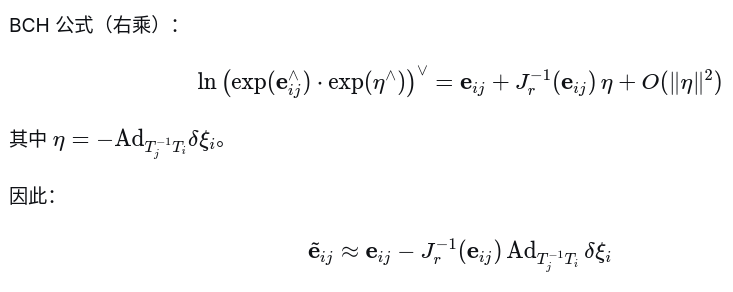
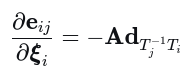
(5) 得到雅可比
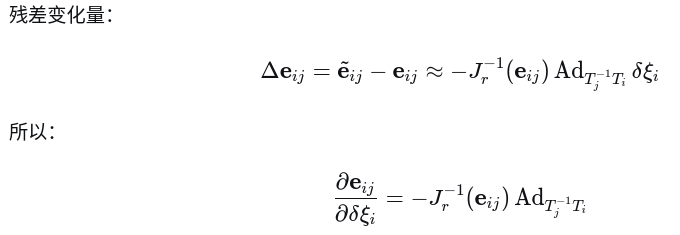
(6) 最终结果(右扰动)
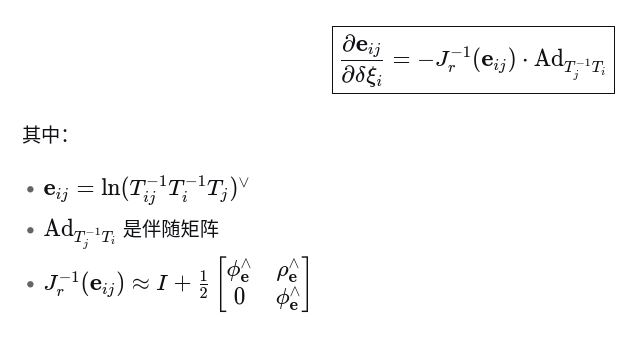
注意: 在(六)中介绍过,右雅可比可近似为单位阵,因此i时刻雅可比可简化为如下
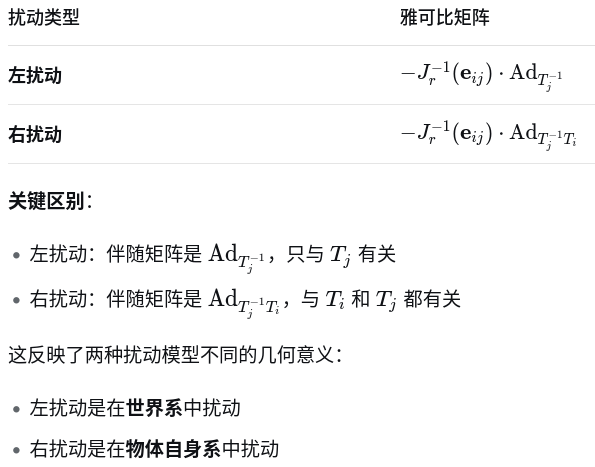
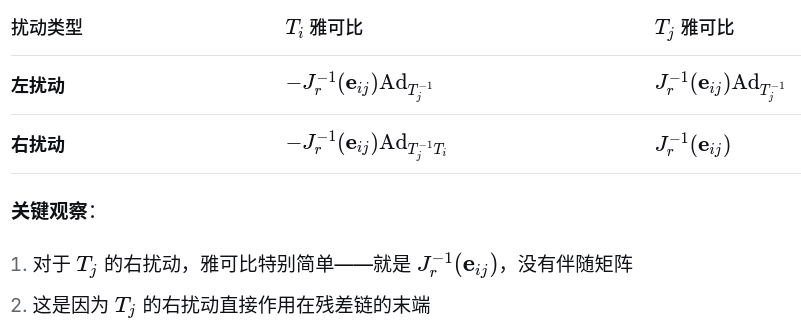
(7) 与左扰动对比
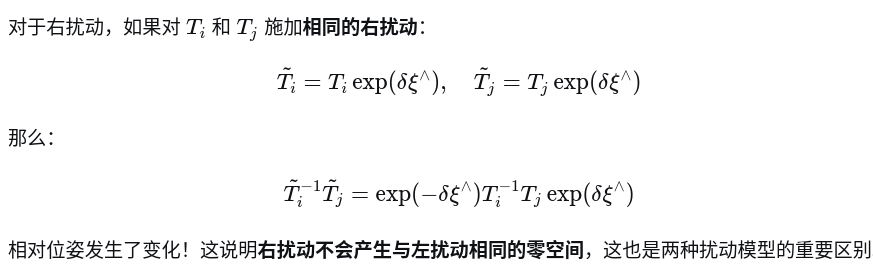
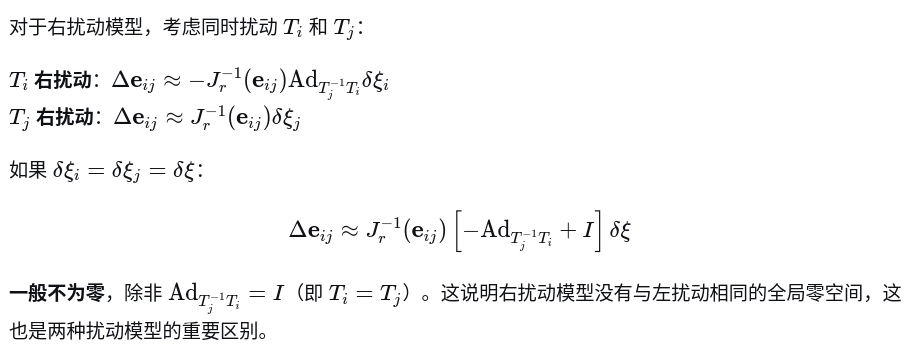
(8) 验证零空间性质
3.2 再对j时刻求导
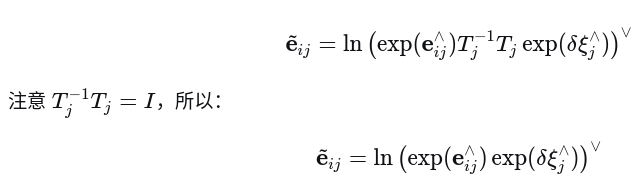
(1) 用指数表示原始残差
(2) 代入扰动后的残差
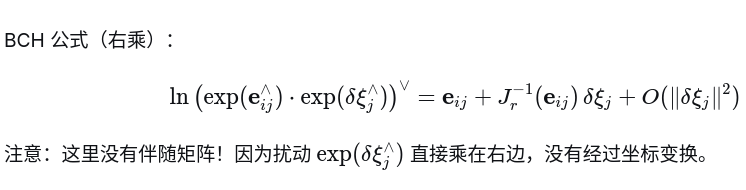
(3) 应用 BCH 公式
(4) 得到雅可比
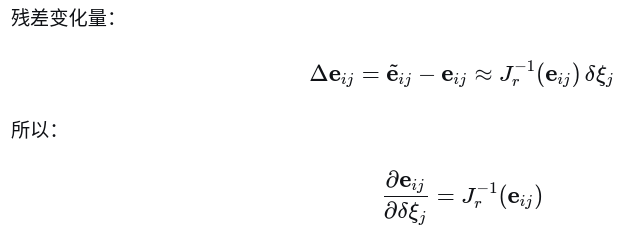
(5) 最终结果(右扰动)
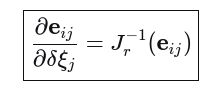
同样,右雅可的逆可近似为单位阵,因此
(6) 与左扰动对比

(7) 验证零空间性质
三. 代码展示
此处代码以GTSAM-4.2.0版本为例,误差模型跟雅可比如下所示
/// evaluate error, returns vector of errors size of tangent space
Vector evaluateError(const T& p1, const T& p2, boost::optional<Matrix&> H1 =
boost::none, boost::optional<Matrix&> H2 = boost::none) const override {
T hx = traits<T>::Between(p1, p2, H1, H2); // h(x)
// manifold equivalent of h(x)-z -> log(z,h(x))
#ifdef GTSAM_SLOW_BUT_CORRECT_BETWEENFACTOR
typename traits<T>::ChartJacobian::Jacobian Hlocal;
Vector rval = traits<T>::Local(measured_, hx, boost::none, (H1 || H2) ? &Hlocal : 0);
if (H1) *H1 = Hlocal * (*H1);
if (H2) *H2 = Hlocal * (*H2);
return rval;
#else
return traits<T>::Local(measured_, hx);
#endif
}这里的
T hx = traits<T>::Between(p1, p2, H1, H2); // h(x) 即为雅可比矩阵内部实现
Class between(const Class& g, ChartJacobian H1,
ChartJacobian H2 = boost::none) const {
Class result = derived().inverse() * g;
if (H1) *H1 = - result.inverse().AdjointMap();
if (H2) *H2 = Eigen::Matrix<double, N, N>::Identity();
return result;
}上述中H1即为推导中的i时刻雅可比;H2为j时刻雅可比,与推导完全一致
返回值
return traits<T>::Local(measured_, hx);
Vector6 Pose3::ChartAtOrigin::Local(const Pose3& pose, ChartJacobian Hpose) {
#ifdef GTSAM_POSE3_EXPMAP
return Logmap(pose, Hpose);
#else
Matrix3 DR;
Vector3 omega = Rot3::LocalCoordinates(pose.rotation(), Hpose ? &DR : 0);
if (Hpose) {
*Hpose = I_6x6;
Hpose->topLeftCorner<3, 3>() = DR;
}
Vector6 xi;
xi << omega, pose.translation();
return xi;
#endif
}即为残差项
#ifdef GTSAM_SLOW_BUT_CORRECT_BETWEENFACTOR
typename traits<T>::ChartJacobian::Jacobian Hlocal;
Vector rval = traits<T>::Local(measured_, hx, boost::none, (H1 || H2) ? &Hlocal : 0);
if (H1) *H1 = Hlocal * (*H1);
if (H2) *H2 = Hlocal * (*H2);
return rval;
#else
#endif这里放下一节再讲解;
总结:
本节详细推导了右扰动下的残差跟雅可比,并展示了gtsam库中的实现,与推导一摸一样,足以证明理论的正确性,下一节将详细对比左右扰动下雅可比代码实现