全局坐标系
CARLA 基于 Unreal Engine 4.26 构建,采用与之相同的左手坐标系 。更多关于 Unreal Engine 坐标系的细节,请参阅 Unreal Engine 官方文档。
对于站在原点、面朝 X 轴正方向 的观察者,坐标轴关系如下:
- Z 轴:向上(Up)
- X 轴:向前(Forward)
- Y 轴:向右(Right)

在整个 CARLA API 中,距离单位为米(meters) ,角度单位为度(degrees)。因此,当 CARLA 与其他使用右手坐标系、弧度制角度、厘米或英制单位的应用程序交互时,必须进行相应的单位转换。
参与者(Actor)坐标系
车辆、行人等参与者(Actors)拥有各自的局部坐标系,用于维护传感器位置等局部一致的坐标关系。
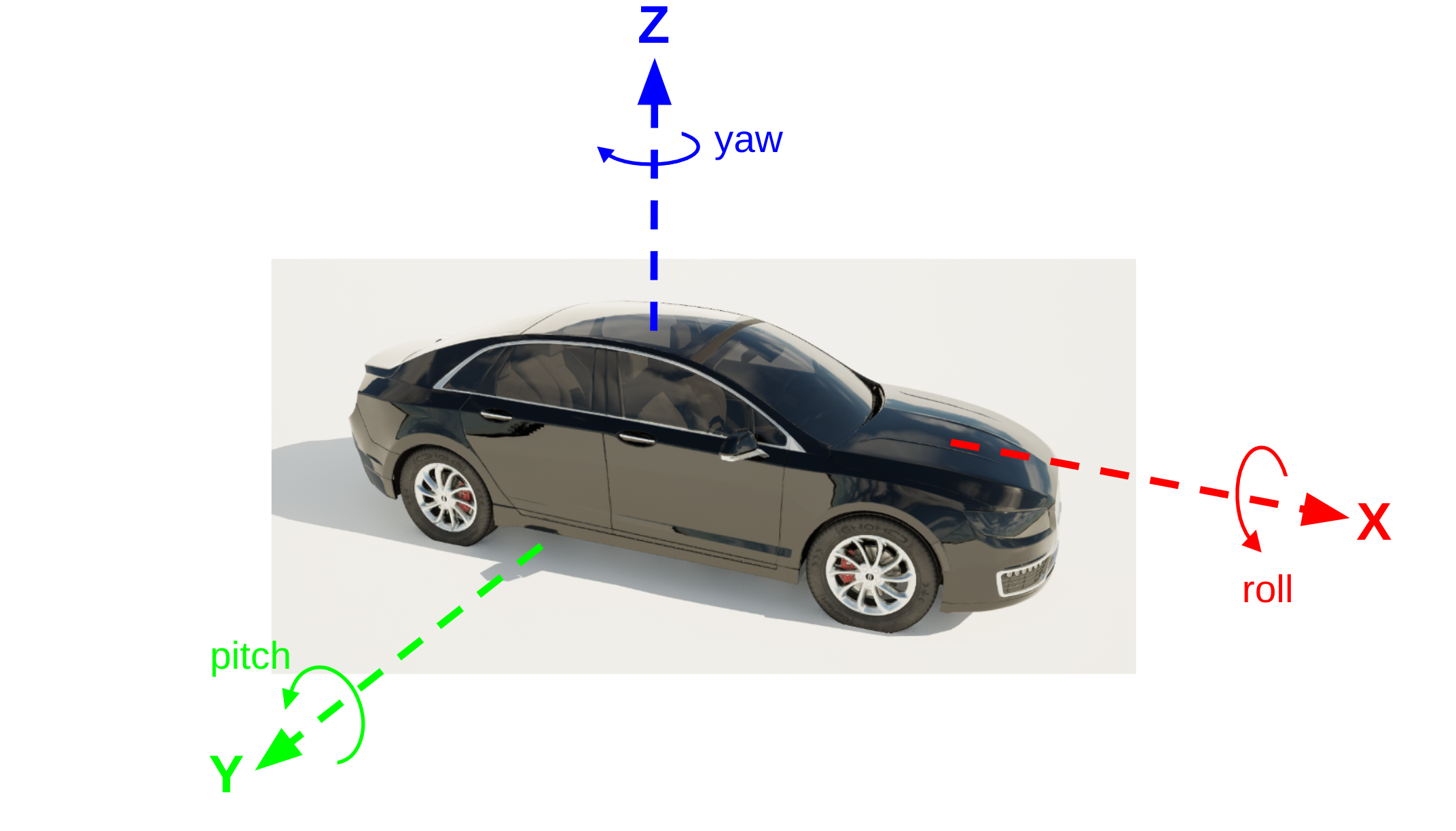
按照惯例,CARLA 中的车辆坐标系定义如下:
- 车头指向 X 轴正方向
- 车辆右侧指向 Y 轴正方向
- 车顶指向 Z 轴正方向
- 坐标原点通常位于车辆包围盒在 X、Y 方向的中心附近,Z 方向则非常接近包围盒的最低面。
CARLA 行人的坐标系类似设定:
- 面朝 X 轴正方向
- 右臂指向 Y 轴正方向
- 头部朝向 Z 轴正方向
- 坐标原点通常位于静止姿态下包围盒的中心。
通过 CARLA API 处理坐标
CARLA API 提供了多个工具类,用于处理坐标及坐标变换。
Location(位置)
Location 对象用于定义坐标,并在变换、生成或移动对象时使用。
以下代码展示了如何创建一个表示 X=10m, Y=10m, Z=1m 的位置对象:
python
# 使用位置参数的默认构造函数
location = carla.Location(10, 10, 1)
# 使用关键字参数
location = carla.Location(x=10, y=10, z=1)
# 无参数构造(默认原点)
location = carla.Location() # x=y=z=0可省略任意或全部关键字参数,未指定的轴将被设为 0。
Rotation(旋转)
Rotation 对象用于定义 CARLA 坐标系中的旋转。旋转以欧拉角(Euler angles) 形式表示,包含 roll(滚转)、pitch(俯仰)、yaw(偏航) ,单位为度(degrees) 。
旋转按 yaw → pitch → roll 的顺序内旋(intrinsic rotation) 应用。
以下代码创建一个 roll=10°, pitch=10°, yaw=90° 的旋转对象:
python
# 使用位置参数(顺序:pitch, yaw, roll)
rotation = carla.Rotation(10, 90, 10)
# 使用关键字参数
rotation = carla.Rotation(pitch=10, yaw=90, roll=10)
# 无参数构造(默认无旋转)
rotation = carla.Rotation() # pitch=yaw=roll=0可省略任意或全部关键字参数,未指定的角度将被设为 0。
Transform(变换)
Transform 对象用于完整描述一个物体的位姿(pose),包含其 3D 位置和旋转。
可通过 Location 和 Rotation 创建 Transform:
python
# 定义位置和旋转
location = carla.Location(10, 10, 1)
rotation = carla.Rotation(yaw=90)
# 创建变换
transform = carla.Transform(location, rotation)该变换可用于生成参与者(如车辆):
python
vehicle = world.spawn_actor(vehicle_bp, transform)可通过 get_transform() 查询参与者的变换,并访问其位置和旋转属性:
python
print(vehicle.get_transform())
print(vehicle.get_transform().location)
print(vehicle.get_transform().rotation)
# 输出示例:
# Transform(Location(x=10, y=10, z=1.0), Rotation(pitch=0.0, yaw=90, roll=0.0))
# Location(x=10, y=10, z=1.0)
# Rotation(pitch=0.0, yaw=90, roll=0.0)Transform 对象提供实用方法,用于对其他坐标应用变换:
-
transform():将局部坐标转换为全局坐标例如,计算安装在车辆上的传感器在全局坐标系中的位置:
pythonsensor_local_coord = carla.Location(1, 0, 0) # 传感器在车体坐标系中的位置 vehicle_transform = vehicle.get_transform() sensor_global_coord = vehicle_transform.transform(sensor_local_coord) # 输出:Vector3D(x=10.0, y=11.0, z=1.0) -
inverse_transform():将全局坐标转换为局部坐标例如,将世界中某物体的位置转换到车辆的局部坐标系(常用于自动驾驶感知系统):
pythonlocation = carla.Location(1, 0, 0) # 全局坐标 vehicle_transform = vehicle.get_transform() transformed_location = vehicle_transform.inverse_transform(location)
地理坐标(Geocoordinates)
地理坐标是大地坐标(geodetic coordinates) ,以 纬度(latitude)、经度(longitude)、海拔(altitude) 表示地球表面位置。
CARLA 地图的 OpenDRIVE 定义文件(.xodr)可在元数据中包含地理参考(georeference) 。OpenDRIVE 标准中地理参考的详细信息请参阅相关文档。
在 OpenDRIVE 文件中,地理参考信息位于 <header> 标签内:
xml
<?xml version="1.0" encoding="UTF-8"?>
<OpenDRIVE>
<header ...>
<geoReference><![CDATA[+proj=tmerc +lat_0=0 +lon_0=0 +k=1 +x_0=0 +y_0=0 +ellps=WGS84]]></geoReference>
...
</header>
...
</OpenDRIVE>CARLA 的 Map 对象利用此地理参考信息,通过地图投影实现 CARLA 世界坐标 ↔ 地理坐标 的相互转换。geoReference 中的参数定义了所用投影类型及 CARLA 地图中心(X=Y=Z=0 点)对应的地理坐标。
将 CARLA 坐标转换为地理坐标:
python
carla_map = world.get_map()
location = carla.Location(0, 0, 0)
print(carla_map.transform_to_geolocation(location))
# 输出示例:
# GeoLocation(latitude=0.000099, longitude=0.000090, altitude=1.000000)将地理坐标转换为 CARLA 坐标:
python
geolocation = carla.GeoLocation(latitude=0.000099, longitude=0.000090, altitude=1.000000)
carla_map = world.get_map()
print(carla_map.geolocation_to_transform(geolocation))
# 输出示例:
# Location(x=10.014747, y=11.016221, z=1.000000)