目录
[3.1.多线程 run() 的核心特性](#3.1.多线程 run() 的核心特性)
1.什么是boost::asio::io_context?
io_context 是 Boost.Asio 的核心事件循环引擎 ,是所有异步操作(定时器、Socket 读写、信号处理等 )的调度中枢。它封装了操作系统的多路复用机制(epoll/Linux、kqueue/BSD、IOCP/Windows、select/poll 跨平台兜底),遵循 Reactor 设计模式,负责监听事件就绪、分发事件到回调函数,是 Asio 异步模型的基石。
通俗理解 :io_context 就像一个「任务调度中心」,你可以向它提交异步任务(如 "等待定时器超时""等待 Socket 可读"),它会在后台监听这些任务的触发条件,一旦条件满足,就调用你指定的回调函数执行任务。
核心组件及关系如下:
cpp
┌─────────────────────────────────────────────────────────┐
│ io_context │
│ ├─ Service Registry(服务注册表):管理各类异步操作的Service │
│ │ ├─ timer_service(定时器服务):管理定时器队列/超时事件 │
│ │ ├─ socket_service(Socket服务):管理fd/套接字事件 │
│ │ └─ signal_service(信号服务):管理信号事件 │
│ ├─ Event Demultiplexer(事件多路复用器):跨平台封装epoll/IOCP等 │
│ ├─ Completion Queue(完成队列):存储就绪事件的回调(线程安全) │
│ ├─ Executor(执行器):调度回调执行(strand是其装饰器) │
│ └─ State Manager(状态管理器):控制run/stop/restart状态 │
└─────────────────────────────────────────────────────────┘核心组件职责:
| 组件 | 底层实现核心 |
|---|---|
| Service Registry | 每个 io_context 对应唯一的 Service 实例(per-io_context 单例),Service 是异步操作的「实际执行者」,负责管理底层资源(如 epoll fd、定时器队列)。 |
| Event Demultiplexer | 跨平台适配层:Linux→epoll、BSD→kqueue、Windows→IOCP、兜底→select/poll;核心是 wait() 方法(阻塞等待事件就绪)。 |
| Completion Queue | 线程安全的 FIFO 队列(互斥锁 + 条件变量保护),存储就绪事件的回调函数;多线程 run() 时竞争消费队列。 |
| Executor | 默认执行器是 io_context::executor_type,负责直接执行回调;strand 是执行器的「序列化装饰器」,保证回调串行执行。 |
| State Manager | 用原子变量(std::atomic<bool>)标记 io_context 状态(running/stopped/restarting),结合互斥锁保证状态切换线程安全。 |
大致流程如下:
2.核心接口详解
io_context 的接口可分为「运行控制」「状态管理」「辅助工具」三类,以下是高频核心接口:
1.运行控制(最核心)
这类接口驱动事件循环,是异步操作能执行的前提。
| 接口 | 作用 | 关键注意点 |
|---|---|---|
run() |
启动事件循环,阻塞直到:① 所有异步操作完成 / 取消;② 调用 stop();③ 无待处理事件(无 work_guard 时) |
无待处理事件时会立即退出;多线程可调用多个 run() 实现负载均衡 |
run_one() |
仅处理一个就绪事件(处理完即返回),返回值为处理的事件数(0 表示无事件) | 可用于手动控制事件处理粒度 |
run_for(duration) |
运行事件循环,阻塞指定时长后退出(即使还有未处理事件) | C++11 时间字面量(如 5s),需 #include <chrono> |
run_until(time) |
运行到指定绝对时间后退出 | 与 run_for 类似,适用于绝对时间场景 |
poll() |
非阻塞处理所有已就绪的事件(无就绪事件则立即返回),返回处理的事件数 | 不会阻塞等待事件,仅处理当前就绪的事件 |
poll_one() |
非阻塞处理一个已就绪事件(无则返回 0) | 非阻塞版 run_one() |
2.状态管理
| 接口 | 作用 | 注意点 |
|---|---|---|
stop() |
立即停止事件循环(所有阻塞的 run()/run_one() 等会立即返回) |
未处理的事件会被放弃;stop() 后需调用 restart() 才能重新运行 |
restart() |
重置 io_context 状态(清空停止标记、重置事件队列),使其可再次 run() |
仅在 io_context 停止后调用才有意义 |
stopped() |
返回 bool:是否已停止(stop() 调用后或 run() 自然退出后为 true) |
可用于判断事件循环状态 |
3.工作守护(防止 run() 提前退出)
io_context 的 run() 会在「无待处理事件」时立即退出,但若需要长期运行(如服务器),需用 work_guard 维持事件循环不退出。
| 类型 | 作用 |
|---|---|
boost::asio::io_context::work(已废弃) |
构造时绑定 io_context,只要 work 对象存在,run() 就不会因无事件退出 |
boost::asio::executor_work_guard(推荐) |
C++11 后推荐的替代方案,用法与 work 一致,更符合现代 C++ 规范 |
如:
cpp
#include <boost/asio.hpp>
#include <chrono>
using namespace boost::asio;
using namespace std::chrono_literals;
int main() {
io_context io;
// 构造 work_guard,防止 io.run() 因无事件立即退出
executor_work_guard<io_context::executor_type> work_guard(io.get_executor());
// 异步定时器(3秒后触发)
steady_timer timer(io, 3s);
timer.async_wait([](const auto& ec) {
if (!ec) std::cout << "定时器触发!" << std::endl;
});
// 启动事件循环(会阻塞,直到 work_guard 销毁/stop() 调用)
io.run();
std::cout << "事件循环退出" << std::endl;
return 0;
}4.其他常用接口
| 接口 | 作用 |
|---|---|
get_executor() |
返回 io_context 的执行器(用于绑定 strand/work_guard) |
notify_fork() |
进程 fork 后调用,重置 io_context 内部状态(避免子进程继承文件描述符冲突) |
service_count() |
返回当前注册到 io_context 的服务数量(如定时器服务、Socket 服务) |
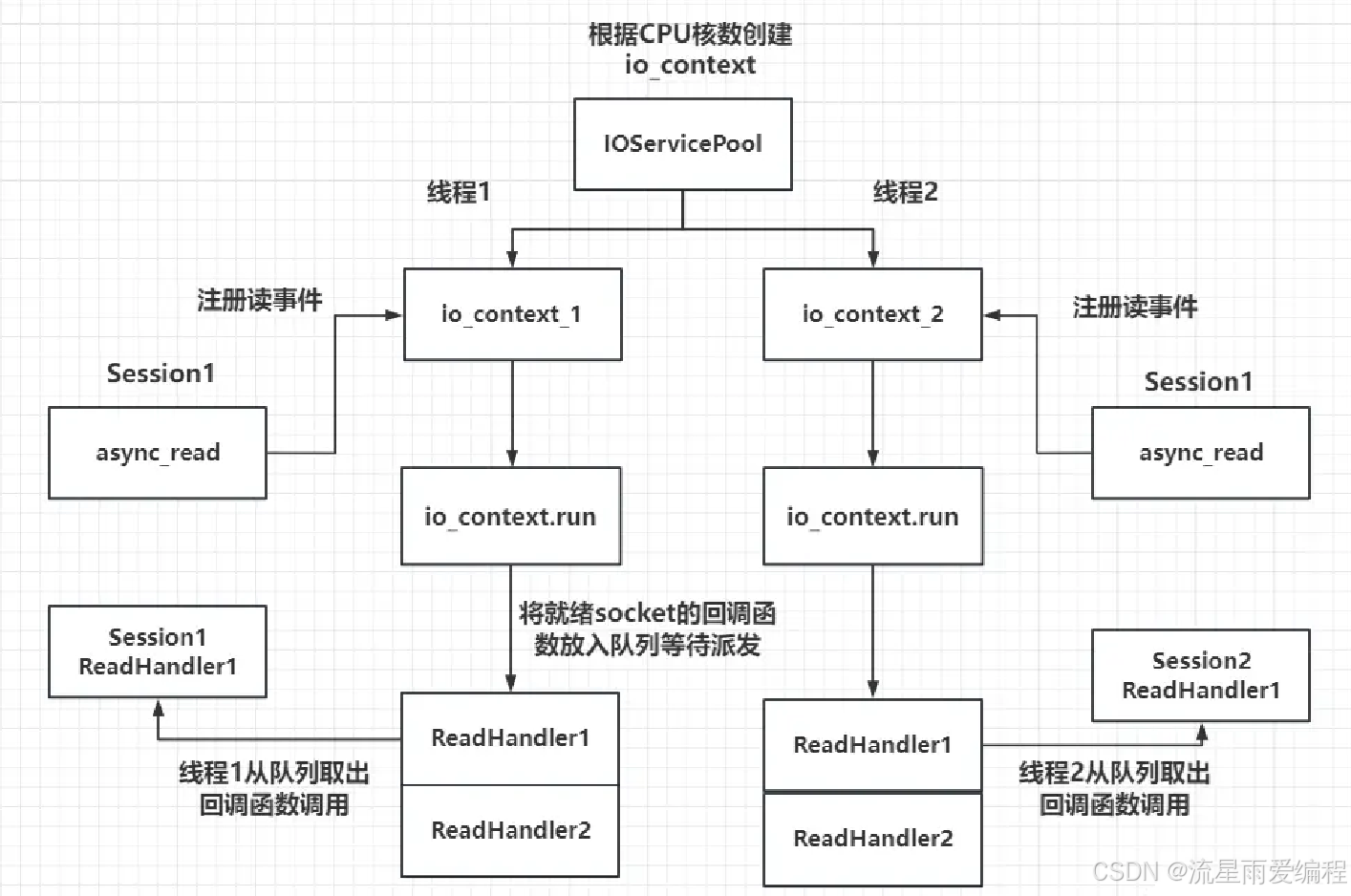
3.多线程使用(核心进阶场景)
io_context 支持多线程并发调用 run(),实现异步操作的并行处理,核心规则如下:
3.1.多线程 run() 的核心特性
- 负载均衡 :
io_context会将就绪事件的回调均匀分发给多个run()线程,避免单线程瓶颈; - 线程安全 :
io_context的run()/stop()/restart()是线程安全的;但回调函数本身不线程安全(多个线程可能同时执行不同回调,若共享数据需加锁); - 事件原子性:单个事件的回调只会被一个线程执行(不会被多线程拆分)。
3.2.Strand:回调序列化(解决线程安全)
strand 能保证绑定的回调串行执行(同一时间只有一个回调运行),比互斥锁更轻量(无需内核态切换),是 Asio 官方推荐的线程安全方案。
方式 1:用 boost::asio::wrap 包裹回调(简洁)
cpp
#include <boost/asio.hpp>
#include <thread>
#include <vector>
#include <iostream>
using namespace boost::asio;
using namespace std::chrono_literals;
int global_count = 0; // 无需互斥锁,strand 保证串行
int main() {
io_context io;
executor_work_guard<io_context::executor_type> work_guard(io.get_executor());
// 创建 strand(绑定 io_context 的执行器)
strand<io_context::executor_type> s(io.get_executor());
// 安全回调(无需加锁)
auto safe_callback = [&](const boost::system::error_code& ec) {
if (!ec) {
global_count++;
std::cout << "线程 " << std::this_thread::get_id()
<< " 执行回调,count = " << global_count << std::endl;
}
};
// 启动 4 个线程
const int thread_num = std::thread::hardware_concurrency();
std::vector<std::thread> threads;
for (int i = 0; i < thread_num; ++i) {
threads.emplace_back([&io]() { io.run(); });
}
// 提交 10 个异步任务,用 strand::wrap 包裹回调
for (int i = 0; i < 10; ++i) {
steady_timer timer(io, 100ms * i);
timer.async_wait(wrap(s, safe_callback)); // 绑定到 strand,保证串行
}
std::this_thread::sleep_for(2s);
io.stop();
for (auto& t : threads) {
t.join();
}
std::cout << "最终 count = " << global_count << std::endl;
return 0;
}方式 2:Lambda 捕获 strand + dispatch(灵活)
适合回调逻辑复杂、需要动态决定是否串行的场景:
cpp
// 替代上面的 async_wait 部分
timer.async_wait([&, s](const boost::system::error_code& ec) {
// 用 strand.dispatch 保证回调在 strand 中串行执行
dispatch(s, [=, &global_count]() {
if (!ec) {
global_count++;
std::cout << "线程 " << std::this_thread::get_id()
<< " 执行回调,count = " << global_count << std::endl;
}
});
});实际场景中,常需要在任意线程向 io_context 提交异步任务(如纯计算任务),并实现「处理完剩余任务后优雅退出」(而非暴力 stop())。
cpp
#include <boost/asio.hpp>
#include <thread>
#include <vector>
#include <iostream>
using namespace boost::asio;
// 用 strand 封装线程安全计数器
struct SafeCounter {
explicit SafeCounter(io_context& io) : s(io.get_executor()) {}
// 异步递增(可在任意线程调用)
void increment() {
post(s, [this]() { // post:将任务提交到 strand 异步执行
count++;
std::cout << "线程 " << std::this_thread::get_id()
<< " 递增 count = " << count << std::endl;
});
}
int get() const { return count; }
private:
strand<io_context::executor_type> s; // 每个资源绑定一个 strand
int count = 0; // 由 strand 保证线程安全
};
int main() {
io_context io;
auto work_guard = make_work_guard(io); // 简化 work_guard 创建
// 启动 3 个线程
std::vector<std::thread> threads;
for (int i = 0; i < 3; ++i) {
threads.emplace_back([&io]() { io.run(); });
}
// 线程安全计数器
SafeCounter counter(io);
// 主线程提交 5 个任务
for (int i = 0; i < 5; ++i) {
counter.increment();
}
// 另一个线程提交 5 个任务
std::thread t([&counter]() {
for (int i = 0; i < 5; ++i) {
counter.increment();
}
});
t.join();
// 优雅退出:销毁 work_guard → 处理完剩余任务后 run() 自然退出
work_guard.reset(); // 销毁 work_guard,解除事件循环的"守护"
io.run(); // 处理剩余回调后退出
// 等待所有线程结束
for (auto& th : threads) {
th.join();
}
std::cout << "最终 count = " << counter.get() << std::endl;
return 0;
}4.跨平台事件多路复用器(核心适配层)
io_context 的核心性能依赖于对操作系统多路复用接口的封装,不同平台的实现差异是底层关键:
1.Linux 平台:epoll 实现(Reactor 原生)
- 核心资源 :
epoll_fd(epoll 实例的文件描述符),由io_context初始化时创建,生命周期与io_context绑定。 - 事件注册 :异步操作(如
socket.async_read_some())会通过socket_service调用epoll_ctl(EPOLL_CTL_ADD),将 fd + 事件类型(EPOLLIN/EPOLLOUT)注册到epoll_fd,并关联io_context的「事件处理回调」。 - 事件等待 :
io_context::run()最终调用epoll_wait(epoll_fd, events, max_events, timeout),阻塞等待事件就绪;timeout由定时器服务(timer_service)计算(取最近到期的定时器时间)。 - 边缘触发(EPOLLET):Asio 默认使用 EPOLLET 模式(边缘触发),减少事件触发次数,提升性能;需保证一次性读完 / 写完 fd 数据,避免事件丢失。
2.Windows 平台:IOCP 实现(Proactor 适配)
Windows 无原生 Reactor 接口,Asio 封装 IOCP(Input/Output Completion Port,Proactor 模式)适配 Reactor 接口:
- 核心资源 :
IOCP_handle(IOCP 端口句柄),io_context初始化时创建,每个io_context绑定一个 IOCP 端口。 - 异步操作投递 :异步 Socket 读写不会直接注册事件,而是调用
WSASend/WSARecv并关联 IOCP 端口,操作系统完成 IO 后将「完成包」投递到 IOCP 端口。 - 事件等待 :
io_context::run()调用GetQueuedCompletionStatus(IOCP_handle, ...)阻塞等待完成包,拿到后将回调加入 Completion Queue。 - 定时器适配 :Windows 下定时器通过
CreateWaitableTimer实现,结合 IOCP 投递完成包,与 IO 事件统一调度。
3.兜底方案:select/poll
若系统不支持 epoll/kqueue/IOCP(如嵌入式系统),Asio 会降级到 select() 或 poll(),但性能较差(fd 数量限制、轮询开销大),仅作为兼容层。
5.同一线程两个io_context可以吗?
一个线程中使用两个 boost::asio::io_context 技术上完全允许 ,但几乎没有实用价值,且会带来资源浪费、调度复杂等问题,属于不合理的设计。
每个 io_context 都是独立的事件循环引擎,拥有自己的:
- 事件集合(监听的 IO / 定时器事件);
- 回调队列(就绪事件的回调函数);
- 底层多路复用句柄(如 epoll fd、IOCP 句柄)。
在同一个线程中,两个 io_context 的运行必须手动协调,因为线程只能同时执行一个 io_context::run() ------ 若先调用 io1.run(),线程会阻塞在 io1 的事件循环中,io2 的所有异步操作(如定时器、Socket 读写)会完全停滞,直到 io1 的 run() 退出(如 stop() 被调用、无待处理事件)。
具体问题与影响:
1.资源浪费:双倍开销,无任何收益
- 每个
io_context会占用独立的内核资源(如 epoll fd、文件描述符、内存),但单线程下无法并行利用这些资源; - 两个
io_context的事件循环无法同时运行,相当于 "一个人干两份活,却占了两个工位",完全是资源冗余。
2.调度复杂:需手动切换事件循环,易导致事件延迟
若要让两个 io_context 都能处理事件,必须手动切换 run() 的调用(如轮询 run_one()),示例如下:
cpp
#include <boost/asio.hpp>
#include <iostream>
#include <chrono>
using namespace boost::asio;
using namespace std::chrono_literals;
int main() {
io_context io1, io2;
// 给两个 io_context 分别注册定时器
steady_timer t1(io1, 1s), t2(io2, 1s);
t1.async_wait([](const auto&) { std::cout << "io1 定时器触发" << std::endl; });
t2.async_wait([](const auto&) { std::cout << "io2 定时器触发" << std::endl; });
// 单线程中轮询两个 io_context(必须手动切换)
while (true) {
io1.run_one(); // 处理 io1 的一个就绪事件(无则阻塞)
io2.run_one(); // 处理 io2 的一个就绪事件(无则阻塞)
}
return 0;
}- 问题:
run_one()是阻塞调用,若io1无就绪事件,线程会卡在io1.run_one(),导致io2的事件(即使已就绪)无法及时处理,出现延迟; - 若用
poll_one()(非阻塞),则会导致线程空轮询,CPU 占用率飙升。
3.无性能提升,反而增加开销
- 单线程下,两个
io_context的总吞吐量不会比一个高 ------ 所有回调最终都是串行执行,且切换run()/poll()会带来额外的函数调用、状态检查开销; - 若两个
io_context有共享资源,回调仍需同步(如strand或锁),进一步增加复杂度。
4.调试与维护成本翻倍
- 两个独立的事件循环,异步操作的调度轨迹分散,排查问题(如回调未执行、事件延迟)时需同时分析两个
io_context的状态; - 代码可读性下降,需额外管理两个
io_context的生命周期、work_guard、stop()等。
最佳实践 :单线程场景下,始终使用一个 io_context + 多个 strand 来管理不同任务;若需隔离事件循环,必须搭配多线程,让每个 io_context 独占一个线程。
6.常见坑点与避坑指南
| 坑点 | 原因 | 解决方案 |
|---|---|---|
run() 立即退出 |
无待处理事件且无 work_guard |
用 executor_work_guard 维持事件循环;或确保有异步操作待处理 |
| 回调函数未执行 | 忘记调用 run()/run_one() 等;或 io_context 已停止 |
检查 run() 是否调用;用 stopped() 检查状态,必要时 restart() |
| 多线程回调数据竞争 | 多个线程同时执行回调访问共享数据 | 用 strand 序列化回调;或加互斥锁 |
stop() 后无法重新 run() |
stop() 会标记 io_context 为停止状态,需重置 |
调用 io.restart() 后再重新 run() |
进程 fork 后 io_context 异常 |
子进程继承了父进程的文件描述符(如 epoll fd),导致事件监听冲突 | fork 后调用 io.notify_fork()(传入 fork_prepare/fork_child) |
回调抛出异常导致 run() 退出 |
未捕获回调中的异常,会终止 run() 线程 |
回调内捕获所有异常;或用 run() 的返回值检查异常 |
7.总结
io_context是 Asio 的事件循环核心,封装跨平台多路复用,驱动所有异步操作;- 异步操作的回调必须依赖
run()/run_one()等接口执行,无run()则回调永远不触发; - 多线程
run()可提升并发,但需用strand保证回调线程安全; work_guard是维持长期事件循环的关键,避免run()因无事件提前退出;- 优先使用
steady_timer+io_context,避免系统时间修改导致异常。