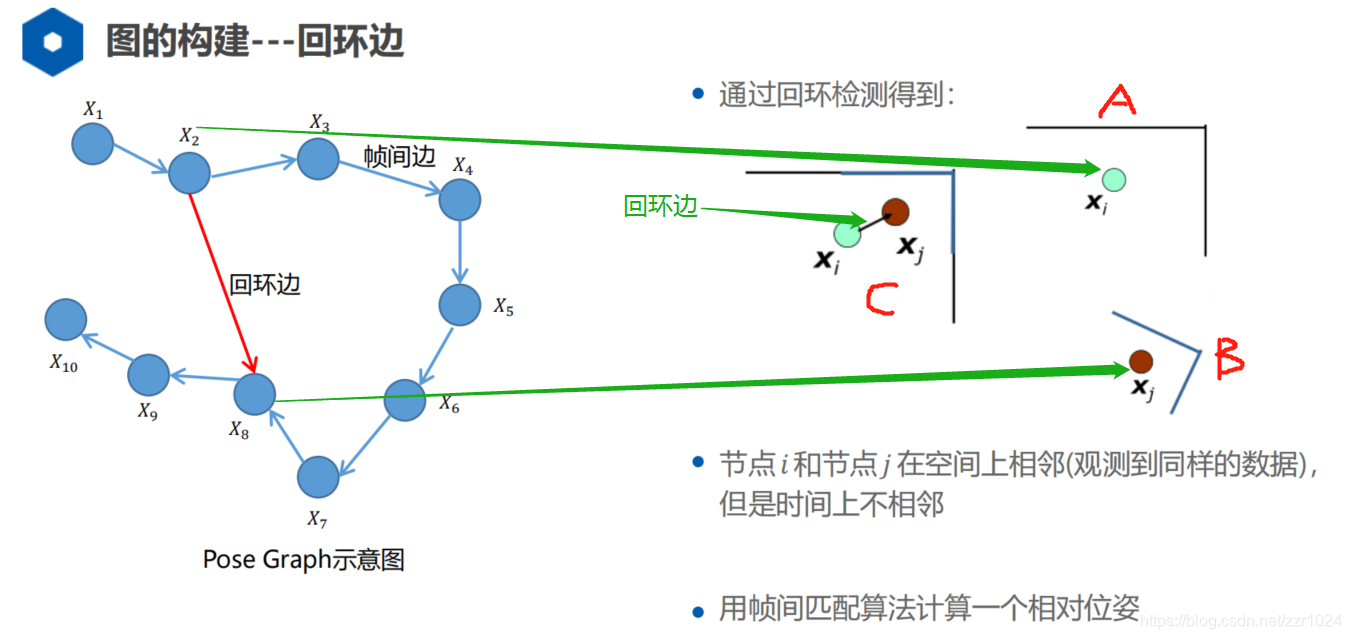
本讲总结下g2o中实现的相对位姿约束,本节主要还是参考了**"白巧克力亦唯心"**的那篇博客,尊重下原创,当然个人对g2o的代码风格不太喜欢,并且时间有限,因此这里只是展示下,不做代码验证,依然沿用之前的图进行说明
一. 基础知识
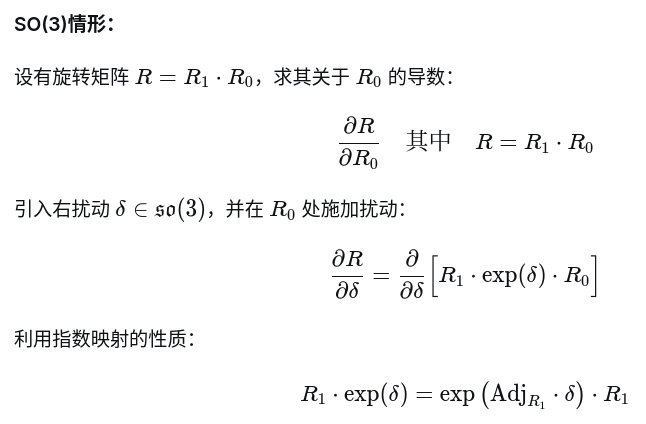
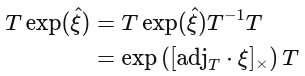
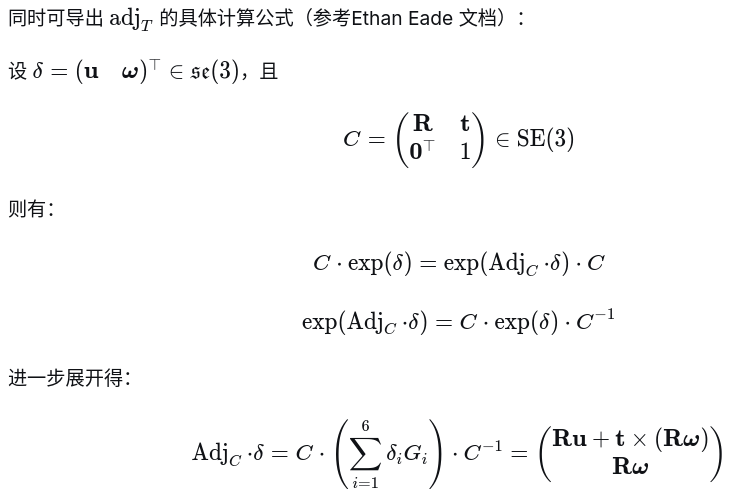
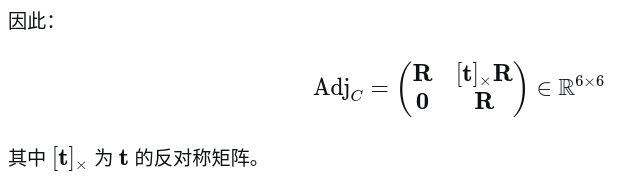
Ethan Eade的《Lie Groups for 2D and 3D Transformations》,发现他的文档早已有相关推导。比如针对两个SO3乘积对其中一个求导:
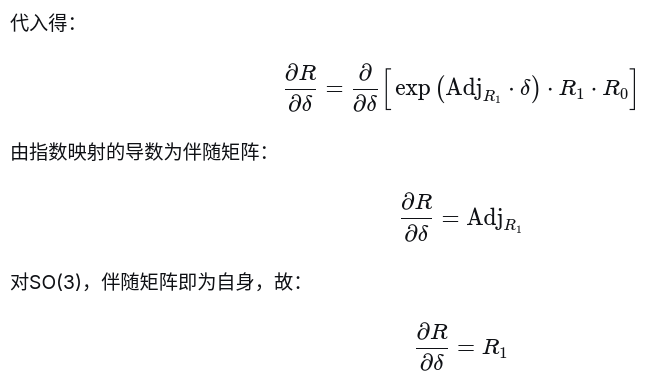
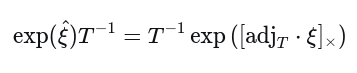
上面这两个推导都利用了伴随矩阵(adjoint)的性质。这部分内容在Ethan Eade的文档中有阐述,也可参考Strasdat博士《Local Accuracy and Global Consistency for Efficient Visual SLAM》论文2.4.7节的定义:


以及

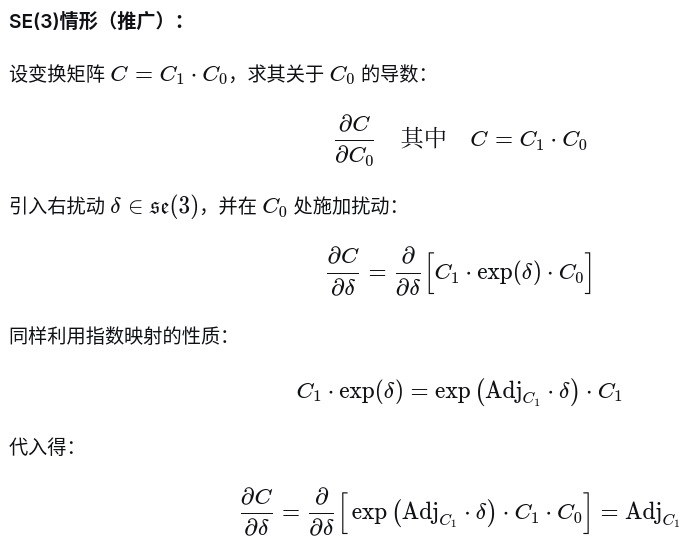
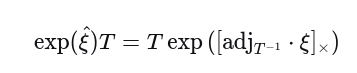
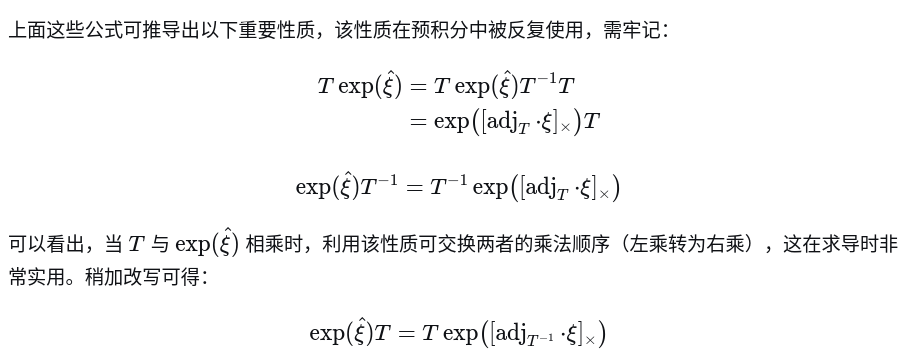
利用该性质可以交换二者的乘法顺序(左乘变为右乘),这在求导时非常有用。同理可得其变体形式:
二. EdgeSE3Expmap边分析
新版貌似不在那个文件下了,不过问题不大
void computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]);
const VertexSE3Expmap* v2 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
SE3Quat C(_measurement);
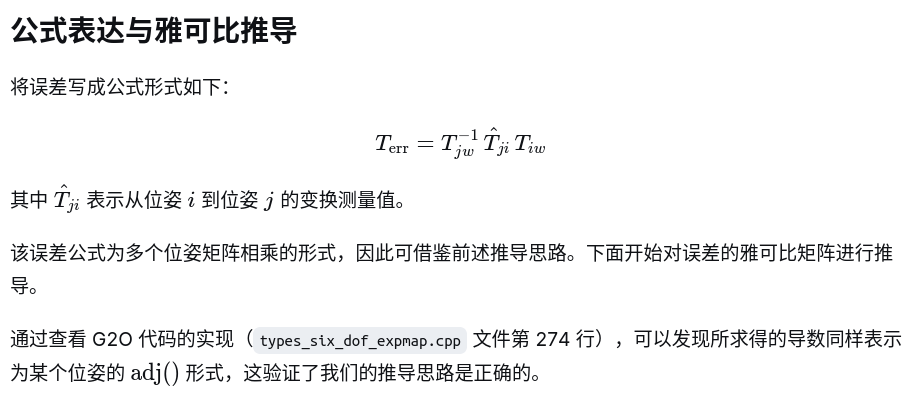
SE3Quat error_= v2->estimate().inverse()*C*v1->estimate();
_error = error_.log();
}
void EdgeSE3Expmap::linearizeOplus() {
VertexSE3Expmap * vi = static_cast<VertexSE3Expmap *>(_vertices[0]);
SE3Quat Ti(vi->estimate());
VertexSE3Expmap * vj = static_cast<VertexSE3Expmap *>(_vertices[1]);
SE3Quat Tj(vj->estimate());
//注意这里把测量标记为Tij应该是标记错误了,应该是Tji,不然整个误差公式说不通了
//这个可以看orbslam EdgeSim3里添加测量时就是用的Sji
const SE3Quat & Tij = _measurement; // shoulb be Tji
SE3Quat invTij = Tij.inverse();
SE3Quat invTj_Tij = Tj.inverse()*Tij;
SE3Quat infTi_invTij = Ti.inverse()*invTij;
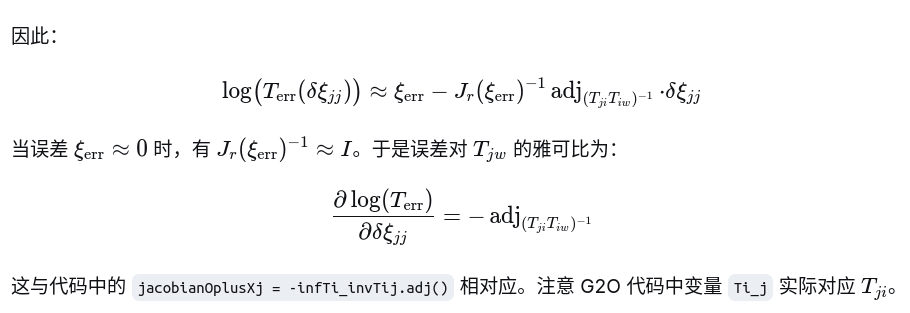
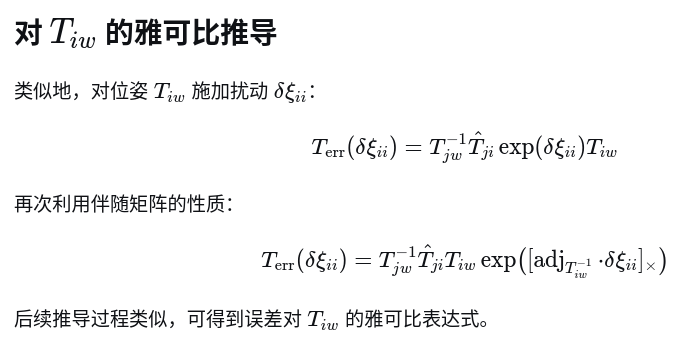
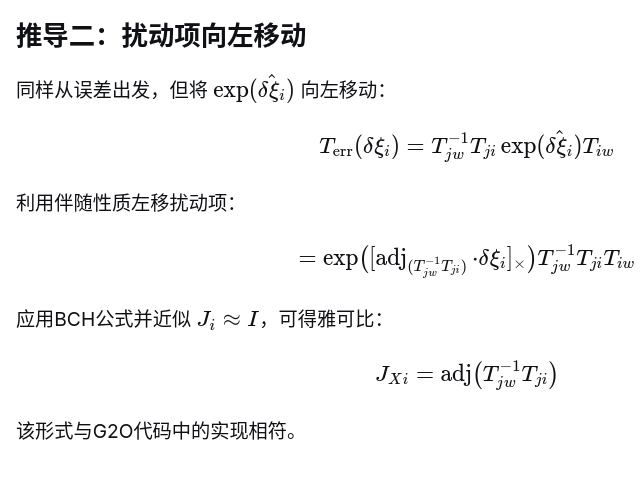
_jacobianOplusXi = invTj_Tij.adj();
_jacobianOplusXj = -infTi_invTij.adj();
}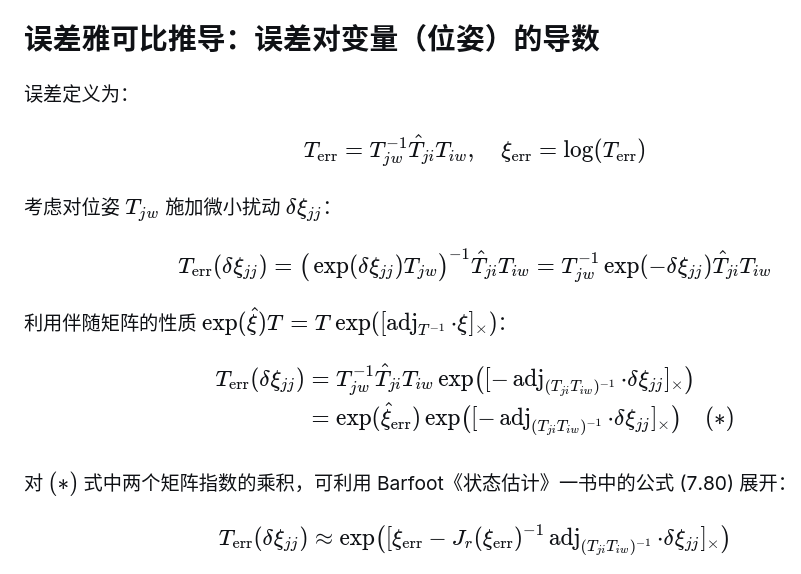
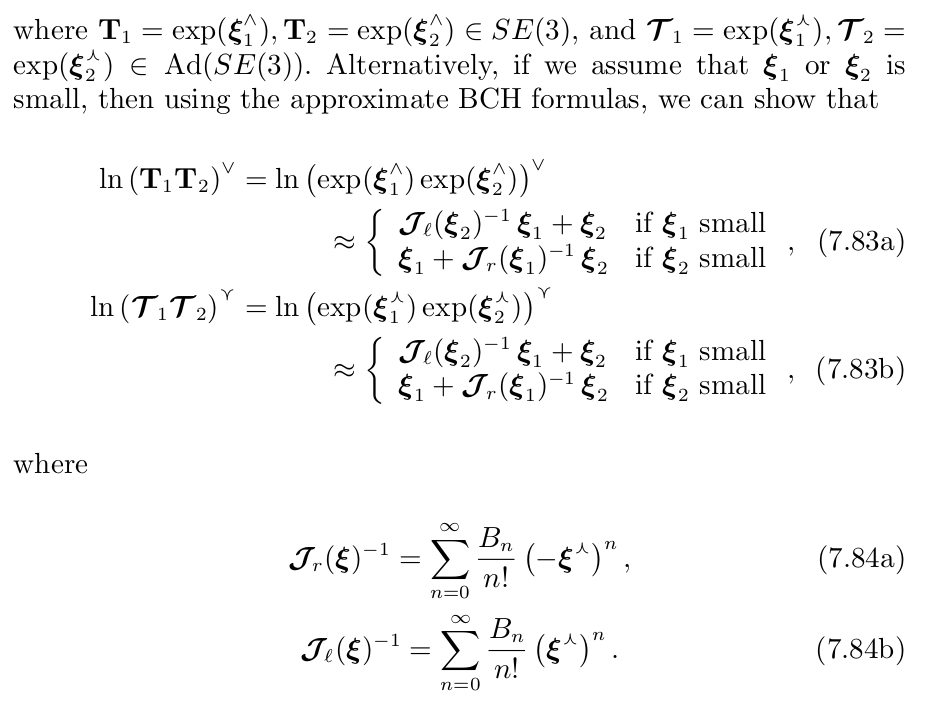
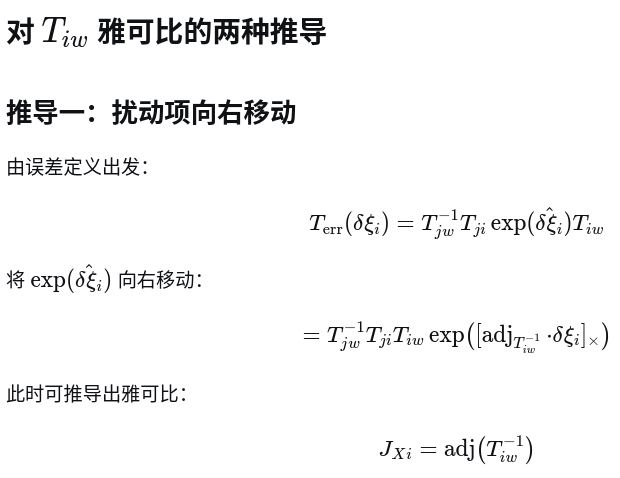
这里的barfoot的状态估计应该是这本书《state estimation for robotics》公式(7.80)如下

显然不是这个公式,实际上就是BCH公式的变形,这里推导也可以参考我之前章节的方法,直接构造对数的形式,而不是指数的形式
总结
本节博客主要总结,收集相关理论,并非个人原创,因为本博客系列是以后端优化为背景介绍的,虽然个人不太愿意完全参考别人的博客,但出于完整性考虑,此处还是搬运下,也作为以后的工具可查询。