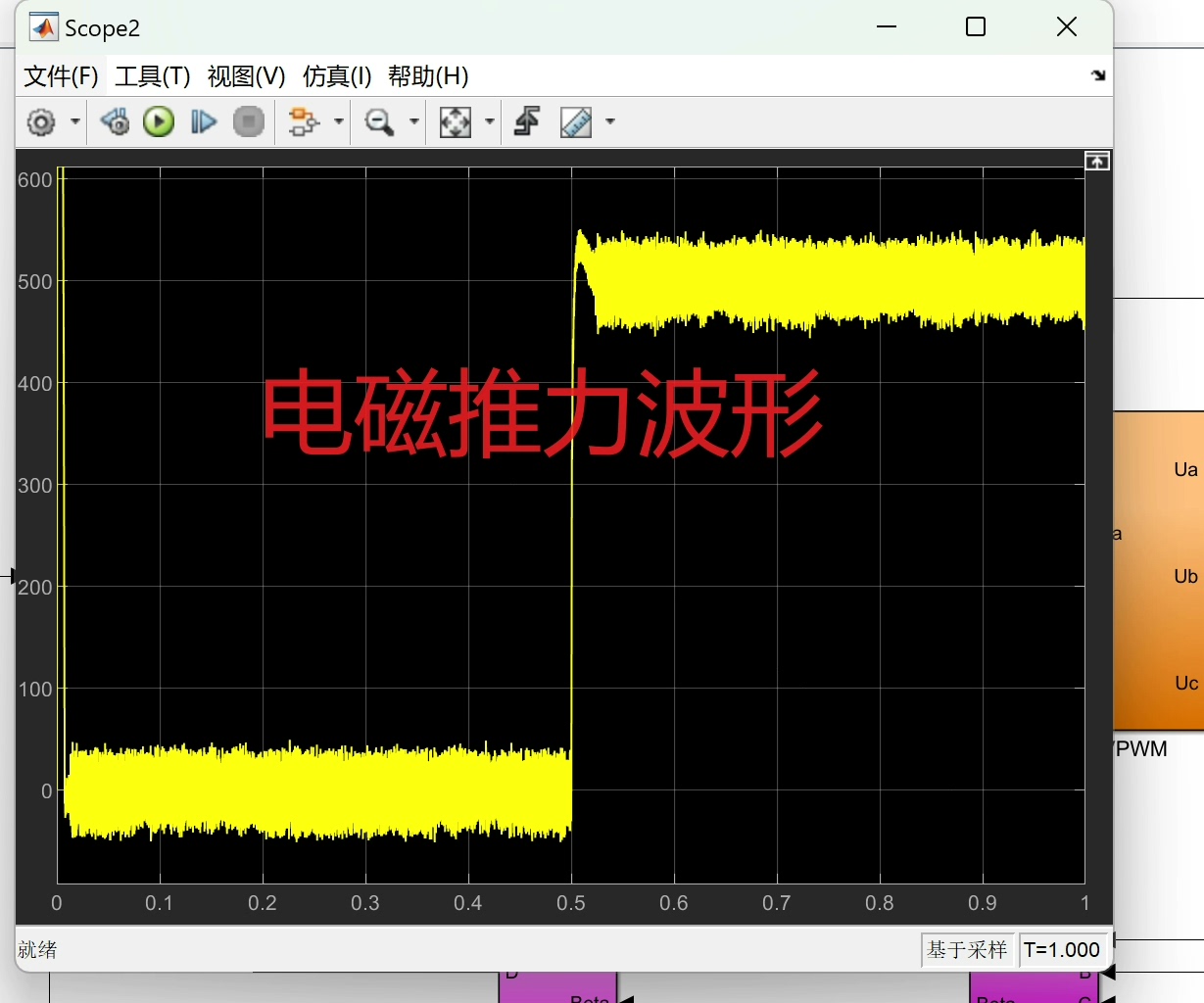
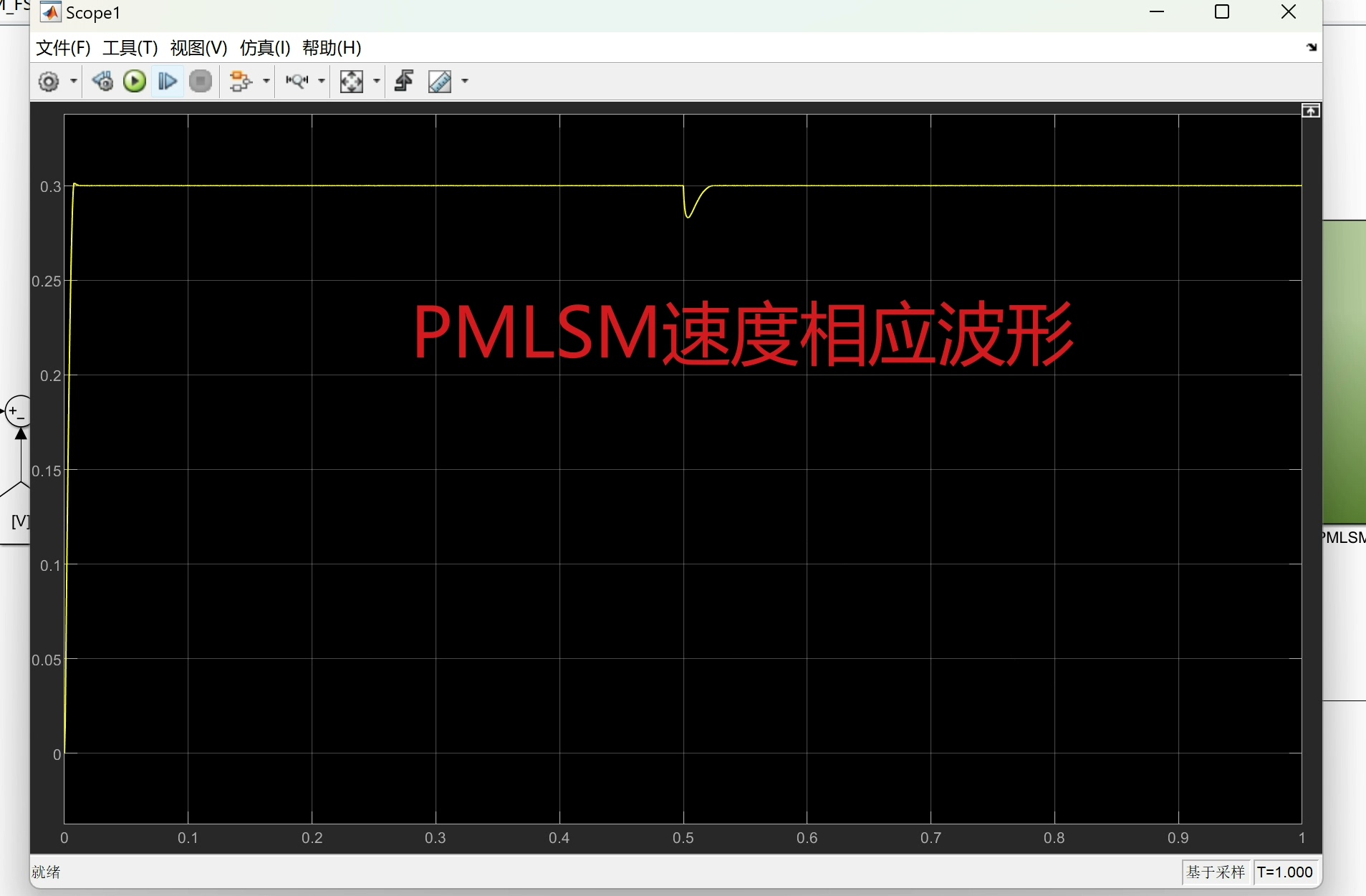
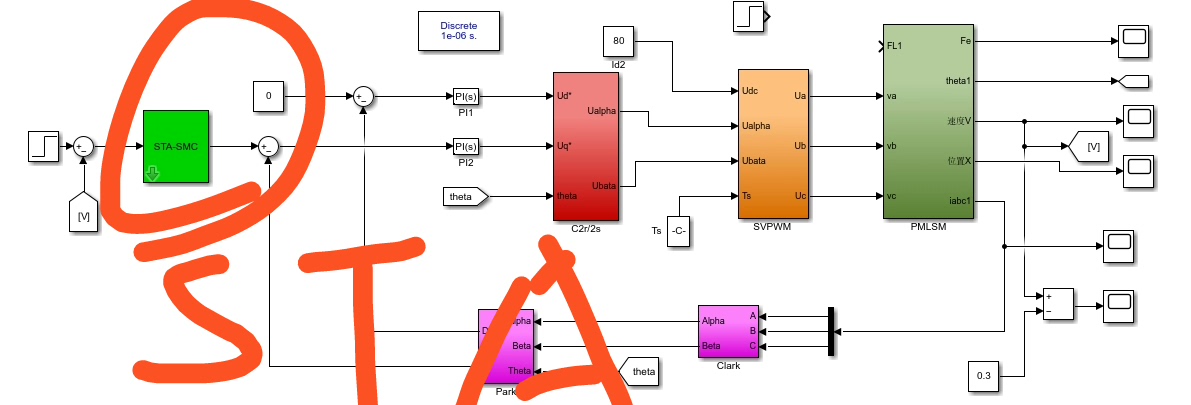
永磁同步直线电机(PMLSM)的控制器。 包含: ①滑模控制器采用超螺旋法(STA---SMC)②一个传统的滑模算法(SMC) 直线电机直线电机直线电机
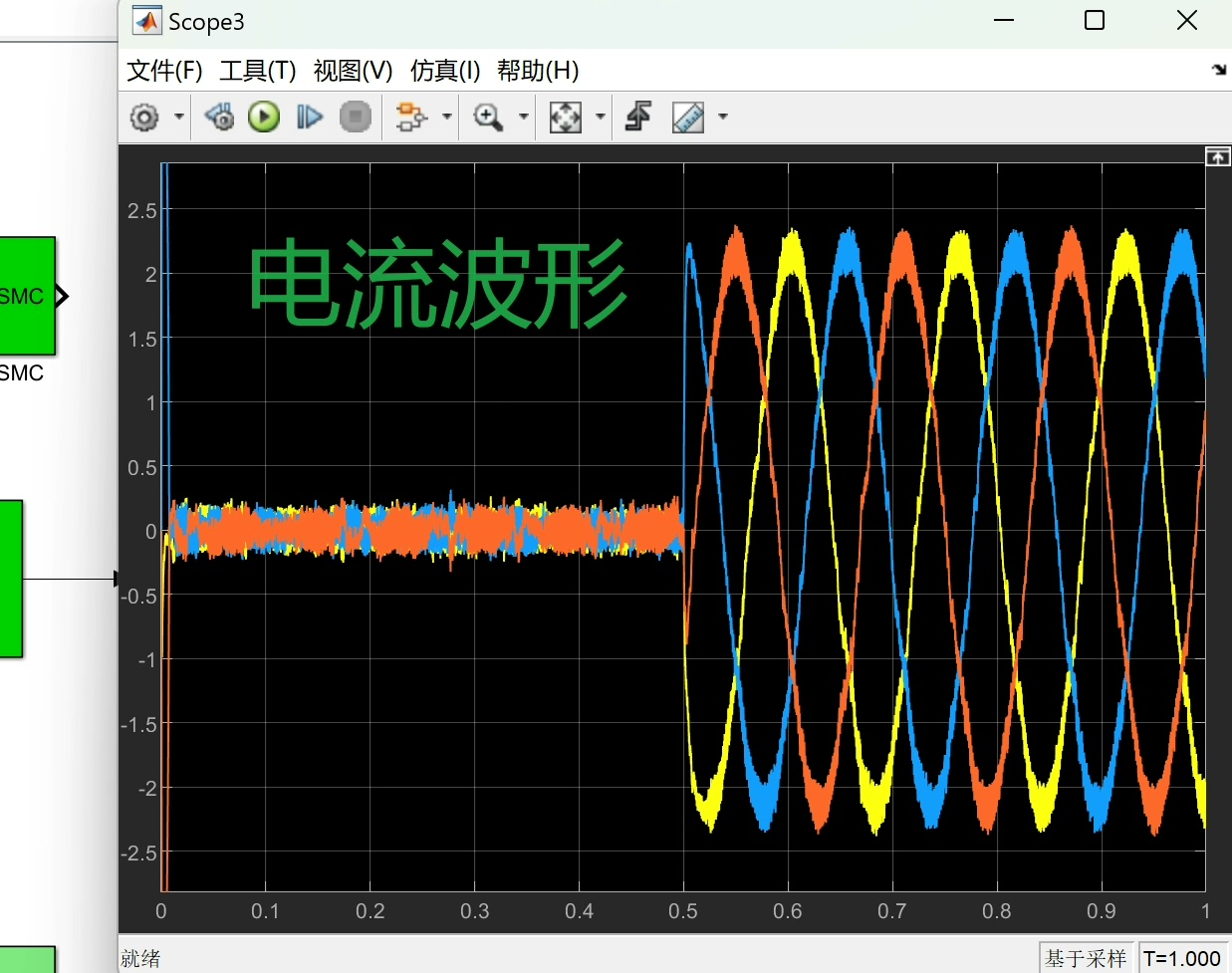
在永磁同步直线电机(PMLSM)的控制领域,滑模控制因其独特的优势而备受关注。今天咱们就来聊聊其中的两种滑模控制算法,传统的滑模算法(SMC)以及超螺旋法(STA - SMC)。
传统滑模算法(SMC)
传统的滑模控制(SMC)是一种变结构控制策略,它通过在系统状态到达滑模面后,迫使系统沿着滑模面滑动,从而实现对系统的有效控制。
咱们来看看简单的代码示例(以Python为例,这里只是为了示意控制逻辑):
python
import numpy as np
# 系统参数设置
kp = 0.5
kd = 0.3
# 初始状态
x = np.array([0, 0])
# 目标状态
xd = np.array([1, 1])
# 滑模面系数
lambda_s = 1
def smc_control(x, xd):
e = x - xd
s = lambda_s * e[0] + e[1]
if s > 0:
u = -kp * np.sign(s) - kd * s
else:
u = kp * np.sign(s) - kd * s
return u在这段代码里,首先定义了系统参数 kp(比例系数)和 kd(微分系数),还有初始状态 x 和目标状态 xd 。smc_control 函数实现了滑模控制的核心逻辑。计算出状态误差 e 后,构建滑模面 s ,然后根据滑模面 s 的值来决定控制输入 u 。当 s 大于 0 时,采用一种控制策略,小于 0 时则采用另一种,通过这种切换来迫使系统状态趋向滑模面并沿着其滑动。
不过传统的SMC也有个小毛病,就是控制输入的高频切换会导致抖振现象,这对系统的实际运行可不太友好。
超螺旋法(STA - SMC)
超螺旋法(STA - SMC)就是为了解决传统SMC的抖振问题而诞生的。它通过引入积分项等方式,实现了连续的滑模控制,有效削弱了抖振。
同样来看代码示例:
python
import numpy as np
# 系统参数设置
alpha = 1.5
beta = 1
# 初始状态
x = np.array([0, 0])
# 目标状态
xd = np.array([1, 1])
# 初始化积分项
z = 0
def sta_smc_control(x, xd, z):
e = x - xd
s = e[0]
u1 = -beta * np.abs(s) ** 0.5 * np.sign(s)
z_dot = -alpha * np.sign(s)
z = z + z_dot
u = u1 + z
return u, z在这个STA - SMC的代码实现中,定义了参数 alpha 和 beta 。stasmccontrol 函数里,先计算状态误差 e ,构建滑模面 s 。这里控制输入 u 由两部分组成,u1 是和滑模面相关的一项,通过积分项 z 不断更新,最终组合成总的控制输入 u 。这种方式使得控制输入更加平滑,大大减轻了抖振现象,让永磁同步直线电机(PMLSM)能够更加稳定地运行。
通过对传统滑模算法(SMC)和超螺旋法(STA - SMC)在永磁同步直线电机(PMLSM)控制中的探讨,我们可以看到不同滑模控制策略的特点和优劣,这对于我们根据实际需求选择合适的控制算法提供了很好的参考。希望这些内容能给正在研究直线电机控制的小伙伴们一些启发!