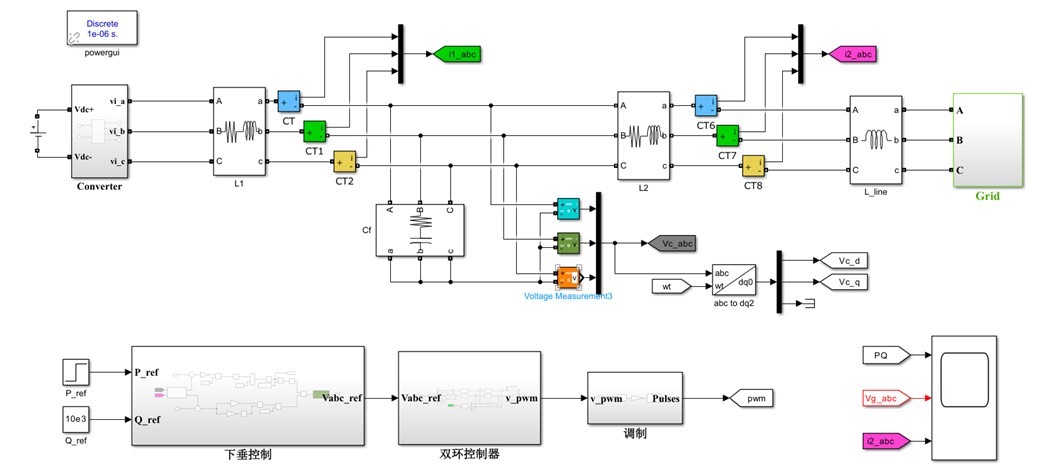
构网变流器功率控制控制(dq坐标系) 1)dq旋转坐标系下实现下垂控制; 2)无功下垂采用比例积分控制,能够实现功率准确、快速无静差跟踪; 3)采用电压电流双闭环、电压前馈实现准确电压跟踪。
烈日当空的下午,实验室里的示波器正跳动着诡异的波形。我盯着屏幕上不断抖动的Q轴电压曲线,突然意识到构网变流器的灵魂就在这神秘的dq坐标系里。今天咱们就来拆解这个让无数工程师又爱又恨的功率控制黑匣子,记得备好咖啡------代码和公式要来了。
先给坐标系做个大保健
python
def abc_to_dq(v_abc, theta):
"""
三相静止转dq旋转坐标系
v_abc: [va, vb, vc]
theta: 当前电角度
"""
T = np.sqrt(2/3)*np.array([
[np.cos(theta), np.cos(theta - 2*np.pi/3), np.cos(theta + 2*np.pi/3)],
[-np.sin(theta), -np.sin(theta - 2*np.pi/3), -np.sin(theta + 2*np.pi/3)]
])
return T @ v_abc这个坐标变换就像给电网信号戴了副VR眼镜,把杂乱的三相信号变成稳定的二维画面。注意那个√(2/3)系数可不是摆设,它能保证功率计算不会精神分裂。
下垂控制:电网里的自动驾驶
想象你在开手动挡,油门踩多少对应车速多少------下垂系数就是那个油门行程。核心代码其实很直男:
c
// 功率-频率下垂计算
void DroopControl(float P, float Q) {
float w_ref = w_n - Kp * (P - P_set);
float V_ref = V_n - Kq * (Q - Q_set);
// 这里w_ref会进入后续的锁相环
}但别被这简单公式骗了,Kp选大了会系统癫痫,选小了响应比树懒还慢。有个骚操作是把下垂系数做成自适应调节,就像给控制算法装了涡轮增压。
PI控制的魔法与陷阱
无功控制那个积分项,简直就是强迫症患者的福音:
python
class PI_Controller:
def __init__(self, Kp, Ki):
self.Kp = Kp
self.Ki = Ki
self.integral = 0
def update(self, error, dt):
self.integral += error * dt
return self.Kp * error + self.Ki * self.integral但注意积分饱和这个老六!上次实验室炸电容就是因为没做抗饱和处理。建议加上输出限幅,就像给野马套个缰绳。
双闭环的冰与火之歌
电压环和电流环的关系,堪比油门和刹车:
matlab
% 电压外环生成电流指令
I_ref = VoltageLoop(V_dc_meas, V_dc_ref);
% 电流内环生成调制波
duty = CurrentLoop(I_meas, I_ref);
% 前馈补偿秀操作
duty += FeedForward(V_grid);这里的电压前馈相当于提前预判了电网的走位,实测能把跟踪误差从10%干到2%以下。不过前馈量别加太猛,否则就像炒菜放多了盐------适得其反。
调参玄学指南
- 先闭着眼睛把电流环带宽设成电压环的5-10倍
- PI参数从临界比例法开始试
- 示波器看波形时,响应曲线要像德芙巧克力般丝滑
- 遇到振荡先查前馈通道,再砍积分系数
实验室的通风扇又开始哀嚎,示波器上的波形终于驯服地躺平。控制算法的魅力就在于:看似冰冷的代码背后,藏着与物理世界博弈的智慧。下次试试在无功环里加点模糊控制?说不定能有意外收获...(电源管理芯片突然冒烟)------当我没说!