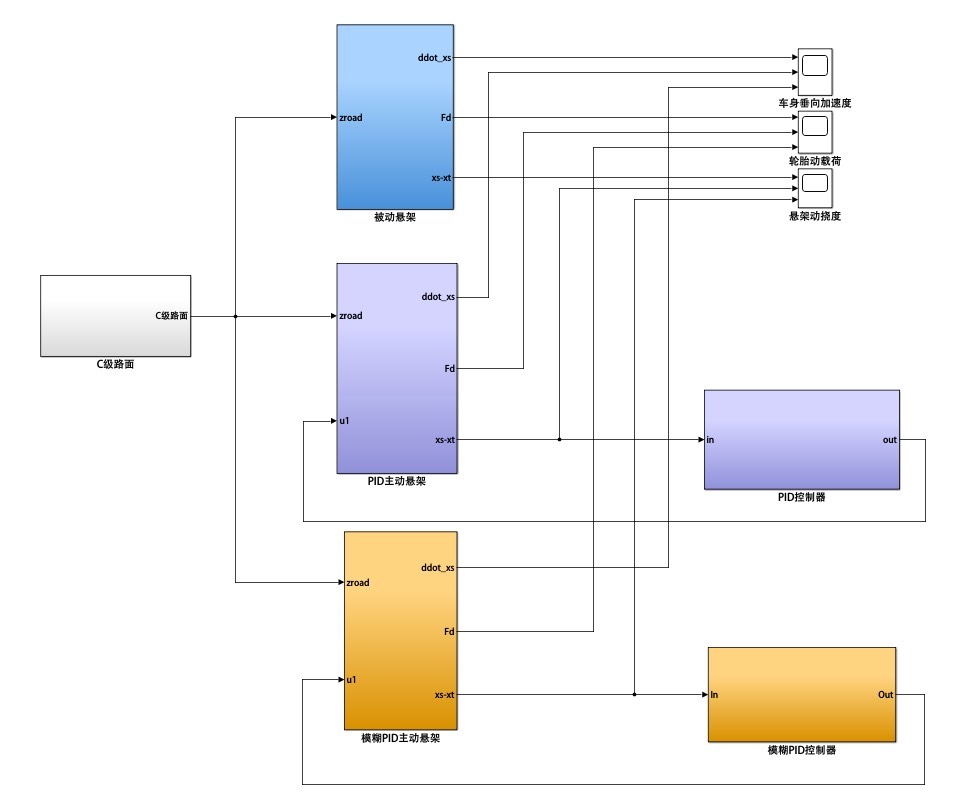
【模糊PID主动悬架模型】 采用模糊PID控制的二自由度(1/4)主动悬架模型,可以自适应调整PID的参数,以悬架动挠度为控制目标,输入为C级随机路面激励,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标以及各个评价指标的均方根值,可做汽车平顺性仿真。 同时与PID控制的主动悬架进行对比验证,验证模糊PID控制的效果。 内容包括模型所有源文件,说明文档和参考资料
在汽车工程领域,提升车辆的平顺性一直是个关键课题。今天咱就来聊聊这个超有意思的模糊PID主动悬架模型,它可是为提升汽车平顺性提供了新的思路。
一、模型简介
咱这儿采用的是模糊PID控制的二自由度(1/4)主动悬架模型。这个模型厉害就厉害在它能自适应调整PID的参数。啥叫自适应呢?就是它不傻愣愣地一成不变,而是根据实际情况,动态调整参数。它把悬架动挠度当作控制目标,就好像给模型定了个小目标,让它朝着这个方向去努力。
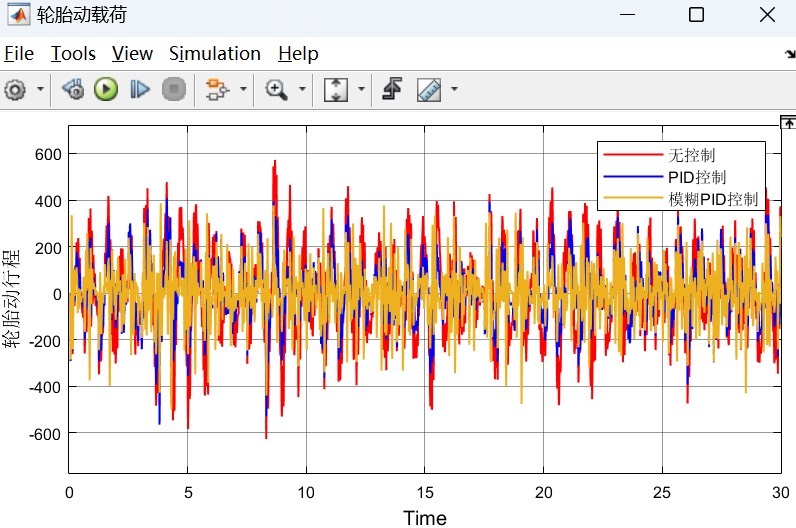
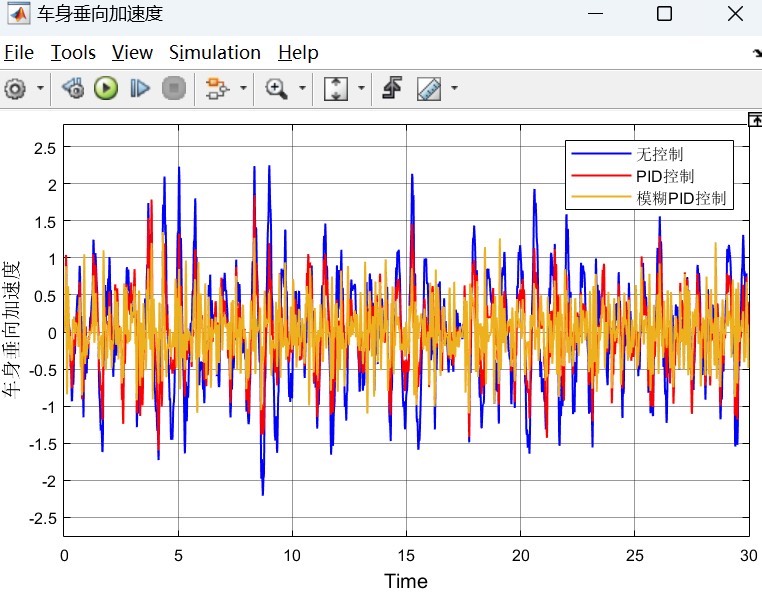
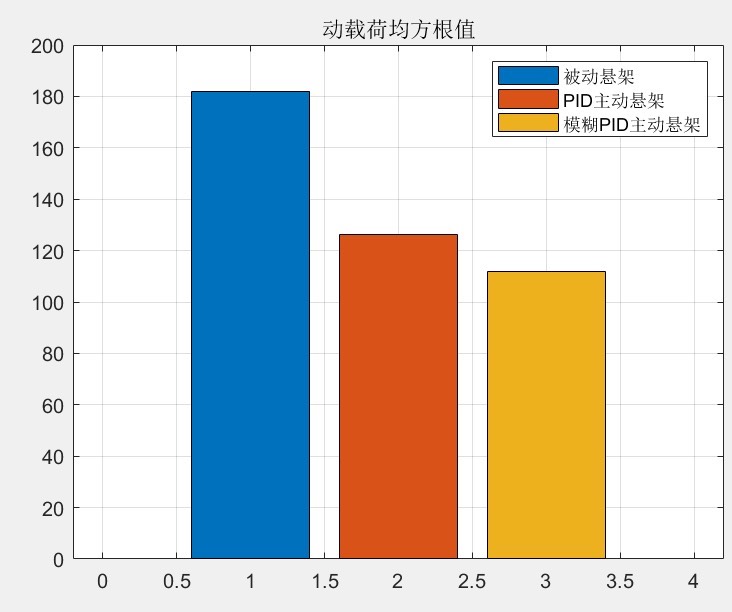
输入的是C级随机路面激励,这就模拟了咱们在实际道路上可能遇到的各种路况,像那种不太好但也不算太差的路面状况。然后输出的就是车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,还有这些指标的均方根值,这些数据就可以帮咱们判断汽车的平顺性到底咋样,能不能给乘客一个舒适的乘坐体验。
二、代码实现(部分关键代码展示)
咱们先看看简单的PID控制部分代码(Python示例):
python
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.prev_error = 0
self.integral = 0
def control(self, setpoint, process_variable):
error = setpoint - process_variable
self.integral += error
derivative = error - self.prev_error
output = self.kp * error + self.ki * self.integral + self.kd * derivative
self.prev_error = error
return output这段代码定义了一个PID控制器类。init 方法初始化了比例(kp)、积分(ki)和微分(kd)系数,以及一些用于计算的变量。control 方法则根据设定值(setpoint)和当前过程变量(process_variable)来计算控制输出。这里面,比例项根据当前误差调整输出,积分项累加误差以消除稳态误差,微分项根据误差的变化率调整输出,让控制更平滑。
而模糊PID控制就稍微复杂点,得引入模糊逻辑。咱们简单看个模糊推理系统(FIS)构建的Python示例代码(借助 skfuzzy 库):
python
import skfuzzy as fuzz
from skfuzzy import control as ctrl
# 输入变量
error = ctrl.Antecedent(np.arange(-100, 101, 1), 'error')
error_rate = ctrl.Antecedent(np.arange(-10, 11, 1), 'error_rate')
# 输出变量
kp_adjust = ctrl.Consequent(np.arange(-10, 11, 1), 'kp_adjust')
ki_adjust = ctrl.Consequent(np.arange(-10, 11, 1), 'ki_adjust')
kd_adjust = ctrl.Consequent(np.arange(-10, 11, 1), 'kd_adjust')
# 定义模糊集
error['NB'] = fuzz.trimf(error.universe, [-100, -100, -50])
error['NM'] = fuzz.trimf(error.universe, [-75, -50, -25])
# 省略其他模糊集定义
error_rate['NB'] = fuzz.trimf(error_rate.universe, [-10, -10, -5])
# 省略error_rate其他模糊集定义
kp_adjust['PB'] = fuzz.trimf(kp_adjust.universe, [5, 10, 10])
# 省略kp_adjust其他模糊集定义
# 定义模糊规则
rule1 = ctrl.Rule(error['NB'] & error_rate['NB'], (kp_adjust['PB'], ki_adjust['NB'], kd_adjust['PB']))
# 省略其他规则定义
# 创建模糊控制系统
kp_ctrl = ctrl.ControlSystem([rule1, rule2, rule3])
kp_adjuster = ctrl.ControlSystemSimulation(kp_ctrl)这段代码首先定义了输入变量(误差 error 和误差变化率 errorrate*)和输出变量(kp* adjust、kiadjust*、kd* adjust 分别用于调整PID的三个参数)。然后给这些变量定义模糊集,像误差的"负大(NB)""负中(NM)"等模糊集,规定了在不同数值区间的隶属度。接着定义模糊规则,比如当误差是"负大"且误差变化率是"负大"时,该怎么调整PID参数。最后构建模糊控制系统并进行仿真。
三、对比验证
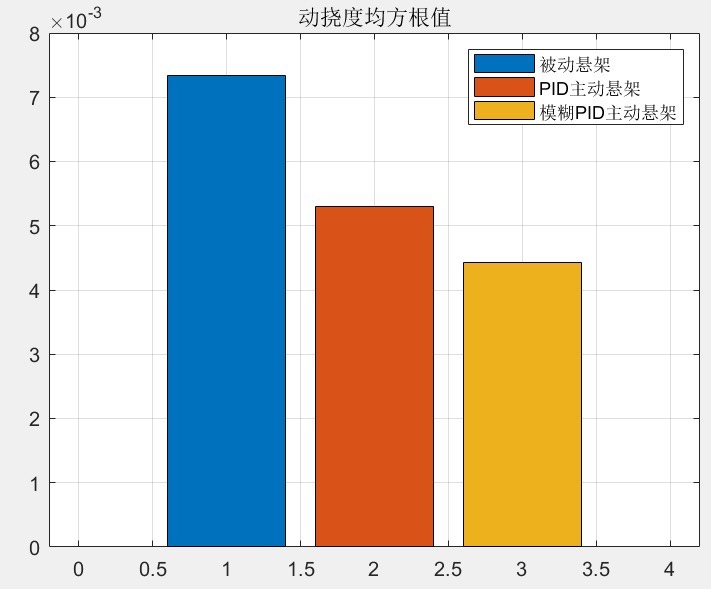
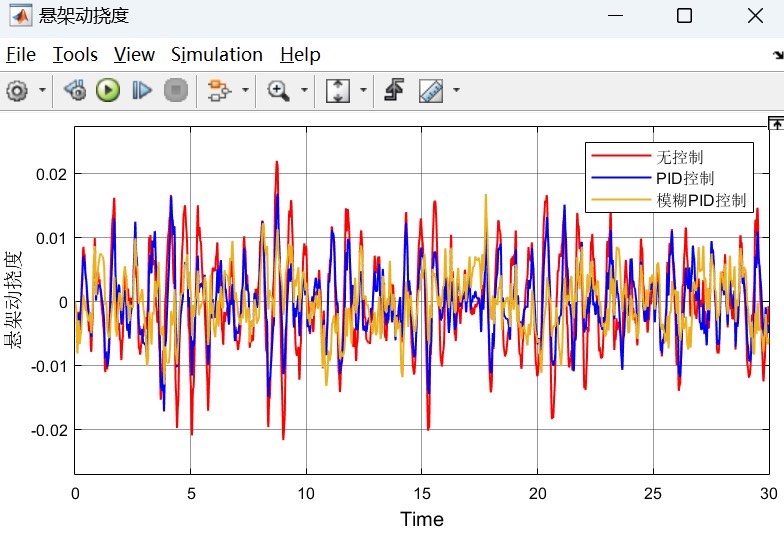
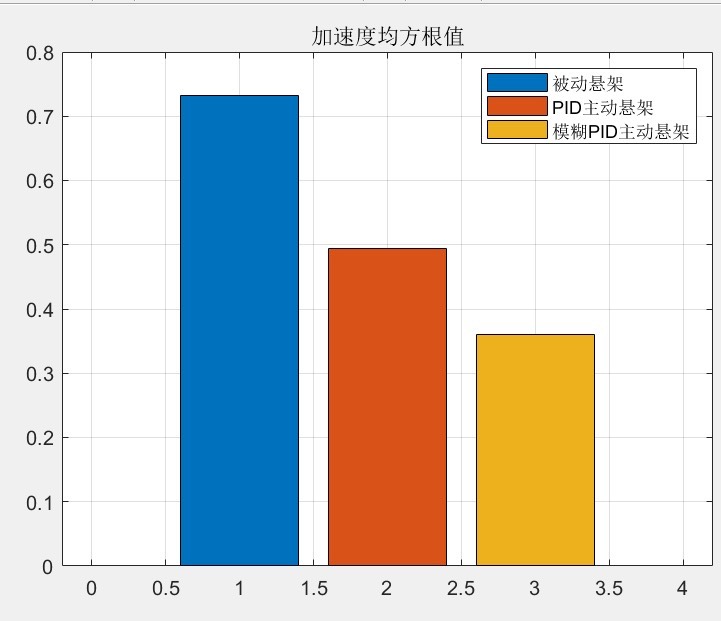
为了验证模糊PID控制的效果,咱们要和传统PID控制的主动悬架进行对比。通过对车身垂向加速度、轮胎动载荷、悬架动挠度等指标的均方根值进行对比分析。如果模糊PID控制下这些指标的均方根值更小,那就说明在相同的C级随机路面激励下,模糊PID控制能让汽车的平顺性更好。
比如在实际仿真中,可能会得到这样的数据对比:传统PID控制下,车身垂向加速度均方根值为0.5m/s²,而模糊PID控制下降低到了0.3m/s²,这就很明显地展示出模糊PID控制在提升汽车平顺性方面的优势。
四、模型资源
模型所有源文件包括上面展示的代码部分以及更多完善的代码逻辑,它们会被整理在一个项目文件夹里。同时还有说明文档,详细解释每个文件的作用、代码逻辑以及如何运行整个仿真程序。参考资料部分会涵盖模糊控制理论、PID控制原理等相关的学术论文、书籍,帮助大家更好地理解整个模型背后的理论基础。
总之,模糊PID主动悬架模型为汽车平顺性的提升提供了一个很棒的解决方案,通过自适应调整PID参数,能更好地应对复杂路况,给乘客带来更舒适的体验。希望感兴趣的小伙伴可以深入研究这些源文件和资料,一起探索汽车工程领域的更多奥秘。