核心定位与解决的问题
随着大型语言模型(LLMs)在推理和决策能力上的持续提升,学术界和工业界亟需一个真实、交互性强的环境来严谨评估其在具身场景中的表现。现有仿真器普遍存在局限:要么聚焦小型室内家庭场景(如VirtualHome、AI2-THOR),环境僵化、物体布局固定,难以支撑泛化性、规划性任务;要么面向游戏设计,虽视觉保真度高,但缺乏具身AI研究所需的模块化、可编程性和语义丰富度。
为此,麻省理工学院联合多伦多大学等多家研究团队提出基于Unreal Engine 5的下一代仿真平台VirtualEnv,核心目标是构建一个支持语言驱动、多模态交互的具身AI研究环境,实现细粒度的LLM基准测试,覆盖物体操作、导航、多智能体协作等复杂场景,同时为AI与游戏交叉领域提供标准化测试床。
- 论文标题:VirtualEnv: A Platform for Embodied AI Research
- 论文链接:https://arxiv.org/abs/2601.07553
相关工作与平台优势
现有具身AI仿真平台各有侧重,但均存在功能短板:
- VirtualHome:聚焦家庭场景,支持日常任务的高层推理,但场景范围受限,缺乏多样性;
- AI2-THOR:支持室内交互任务(视觉问答、导航等),但无城市或户外环境,难以培养AI的泛化能力;
- OmniGibson:引入动态物体状态和物理交互,但仍以家庭场景为主,不适应大规模复杂交互任务;
- Habitat:优化导航与探索性能,但交互性弱,无法满足复杂推理和物体交互需求;
- ProcTHOR:通过程序化生成扩展室内场景多样性,但局限于家庭领域,场景缺乏语义关联性。
VirtualEnv的核心优势在于多维度能力的整合(table 1):
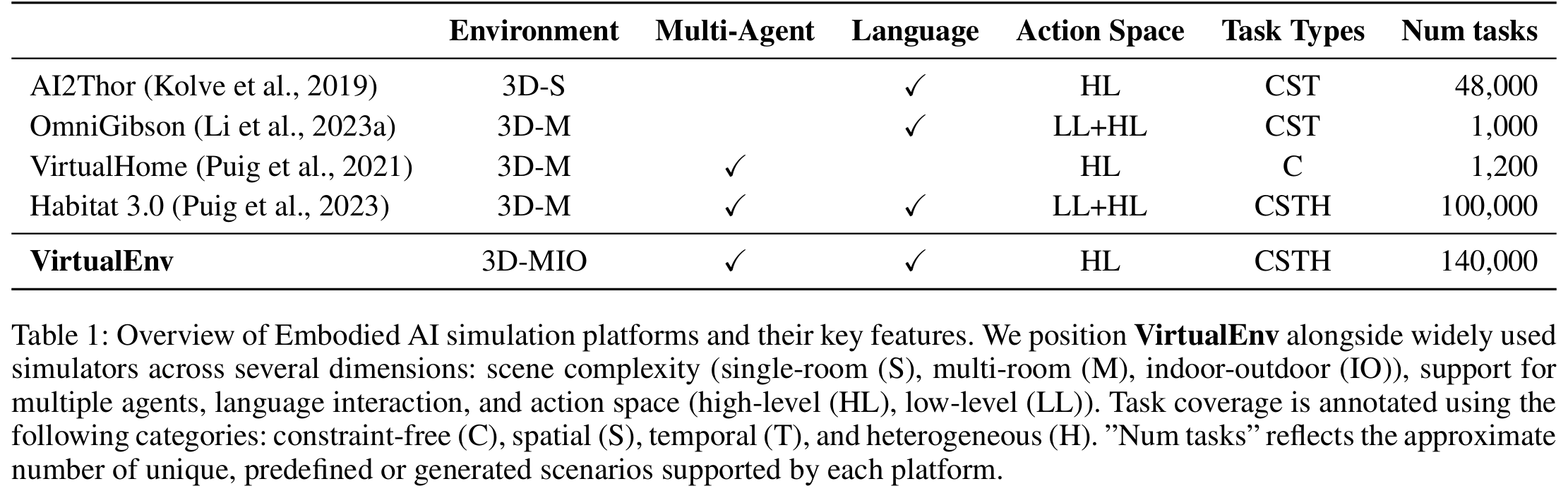
- 环境类型:唯一支持3D多房间+室内-户外(3D-MIO)的平台,突破单一场景限制;
- 任务规模:包含140,000个独特任务,覆盖约束无关、空间、时间、异质性四大类别;
- 核心功能:同时支持多智能体协作、语言交互和高层动作空间,适配LLM驱动的具身研究;
- 视觉与交互:基于Unreal Engine 5实现高保真渲染,搭配20,000+交互式资产,支持细粒度物体操作和物理真实的交互反馈。
核心功能设计
基础架构与核心能力
VirtualEnv的三大核心支柱(figure 2)构成了其复杂场景支撑能力:
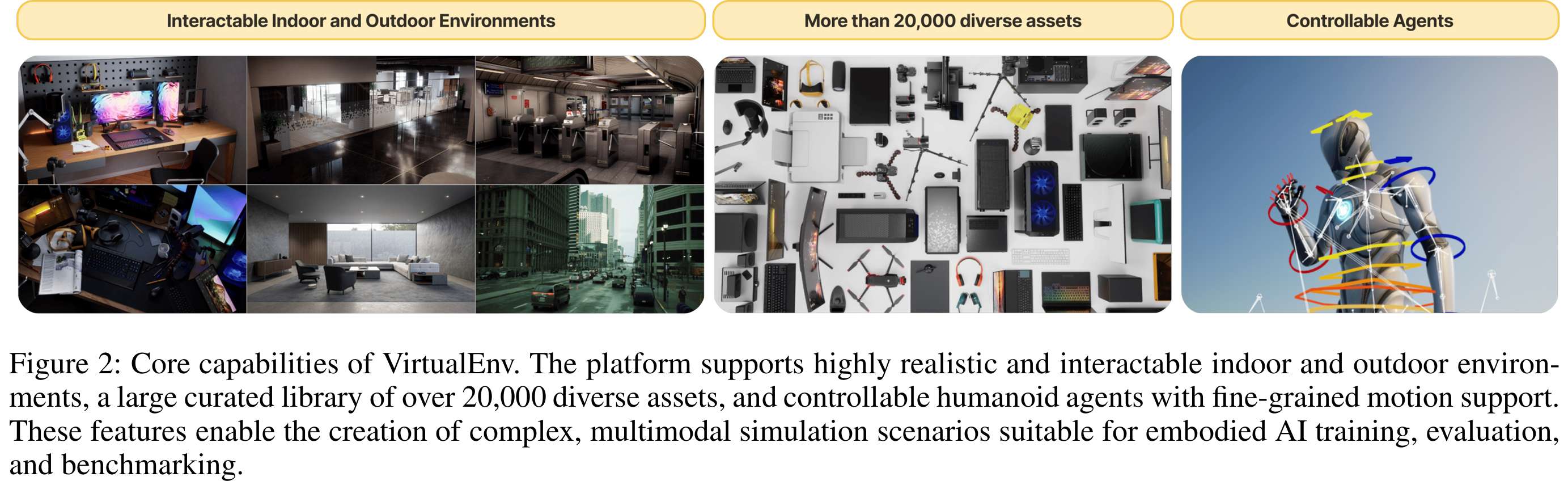
- 高保真引擎:基于Unreal Engine 5,覆盖办公室、零售场所、城市街道等多样化场景,通过先进渲染和程序化生成,实现物理布局、物体摆放、光照条件的无限变化;
- 丰富资产与动作库:20,000+distinct物体均具备交互属性(可打开的门、可移动的家具、可抓取的物品等),部分采用摄影测量扫描建模,确保物理真实性和视觉精度,Unreal Engine的物理引擎支持物体移动、形变、状态转换等真实反馈;
- 多模态感知:提供RGB、深度传感器数据(支持视觉输入和空间理解)、语义分割(像素级物体识别)和全景俯视图(辅助大规模导航),为智能体提供全面的环境感知维度。
语言驱动的交互与场景生成
平台原生支持LLM和视觉语言模型(VLMs)集成,通过轻量Python API实现语言与环境的深度联动:
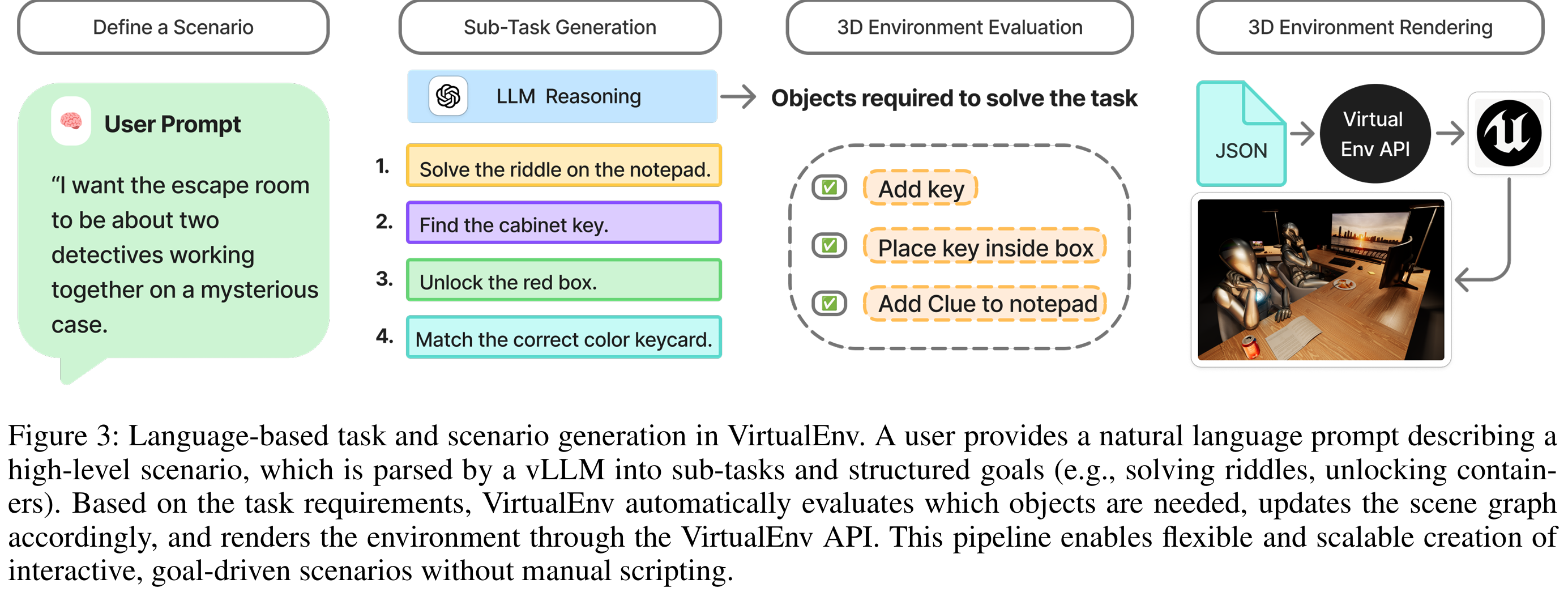
- 任务与场景生成:用户输入自然语言指令(如"设计一个两名侦探合作破解谜案的密室"),LLM将其分解为子任务(匹配颜色钥匙卡、解开记事本谜语等),系统自动识别所需物体、线索和空间布局,更新场景图并渲染环境(figure 3),无需手动脚本编写;
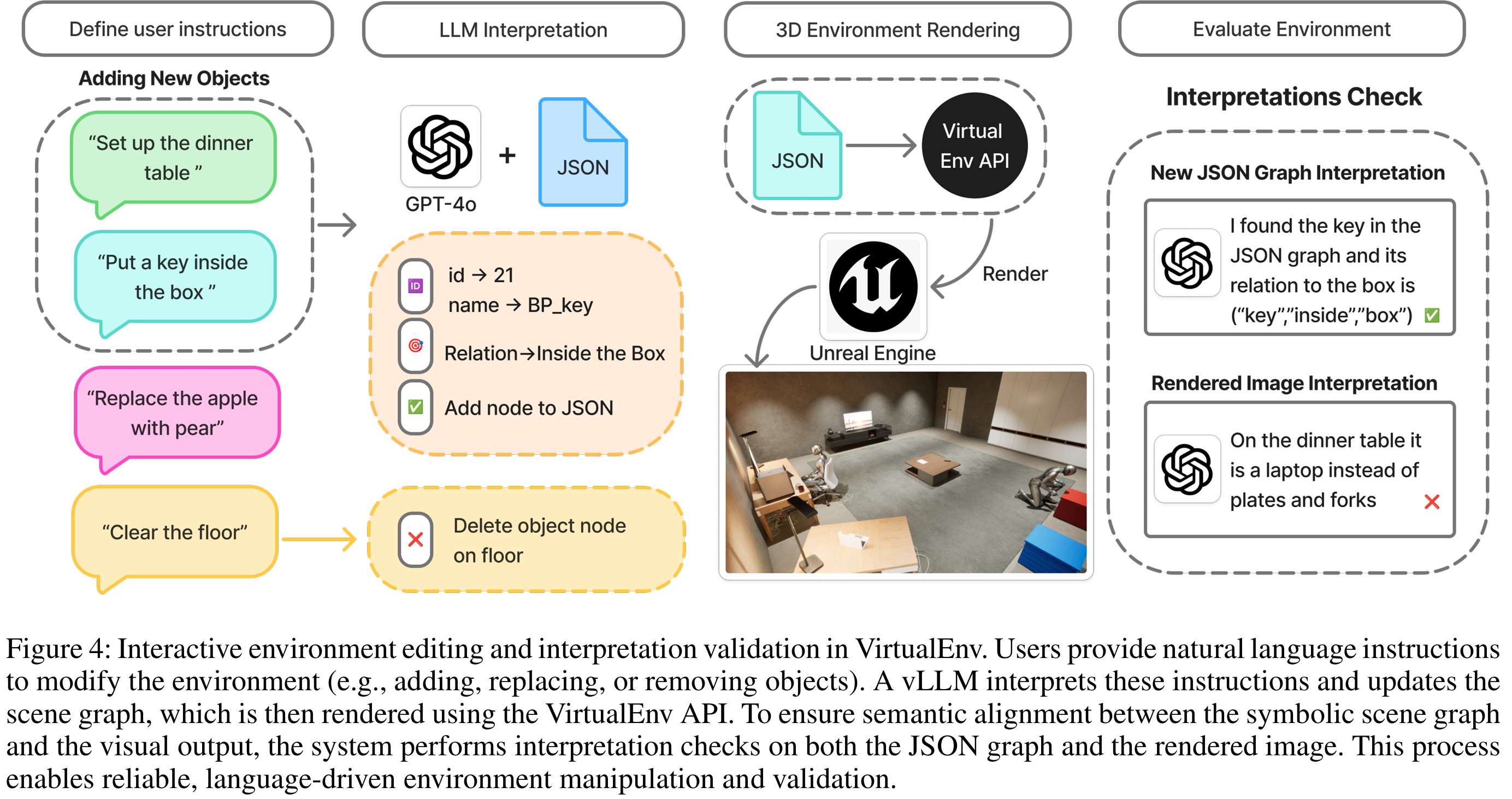
- 环境动态修改:通过vLLM将自然语言指令(如"把钥匙放进盒子里")转换为JSON格式的编辑指令,指定目标物体、空间关系和放置规则,合并到当前场景图后渲染,同时通过"解释校验"确保符号化场景图与可视化结果一致(figure 4),实现无手动干预的精准环境调整。
场景图表示
采用层次化场景图组织环境,编码物体、智能体及空间关系,支持:
- 高效环境状态查询,帮助智能体基于周边环境做决策;
- 语义推理,让智能体理解物体功能和空间约束,提升交互的合理性;
- 部分观测场景的构建,便于研究不确定性下的规划行为;
- 可编程API支持,简化场景和任务的创建与修改,提升研究灵活性。
Escape Room挑战框架
为评估LLM的高阶推理能力,设计了四级难度的密室逃脱框架,梯度提升认知需求:
- Level 1(单步问题):单一线索直接指向目标,测试基础指令解析和动作执行能力;
- Level 2(序列谜题):需完成中间任务(如排列彩色物体)才能获取关键线索,引入多步推理;
- Level 3(元线索):两个并行谜题生成互补线索,需整合多源信息,强化上下文推理;
- Level 4(误导性线索):提供真假两条线索,需辨别正确性,挑战批判性思维和错误校验能力。
该框架将具身AI与游戏应用结合,成功完成任务标志着AI在推理、上下文理解和自适应问题解决上的突破,为LLM微调、具身AI集成提供了灵活的测试场景。
实验验证与关键发现
视觉真实度评估
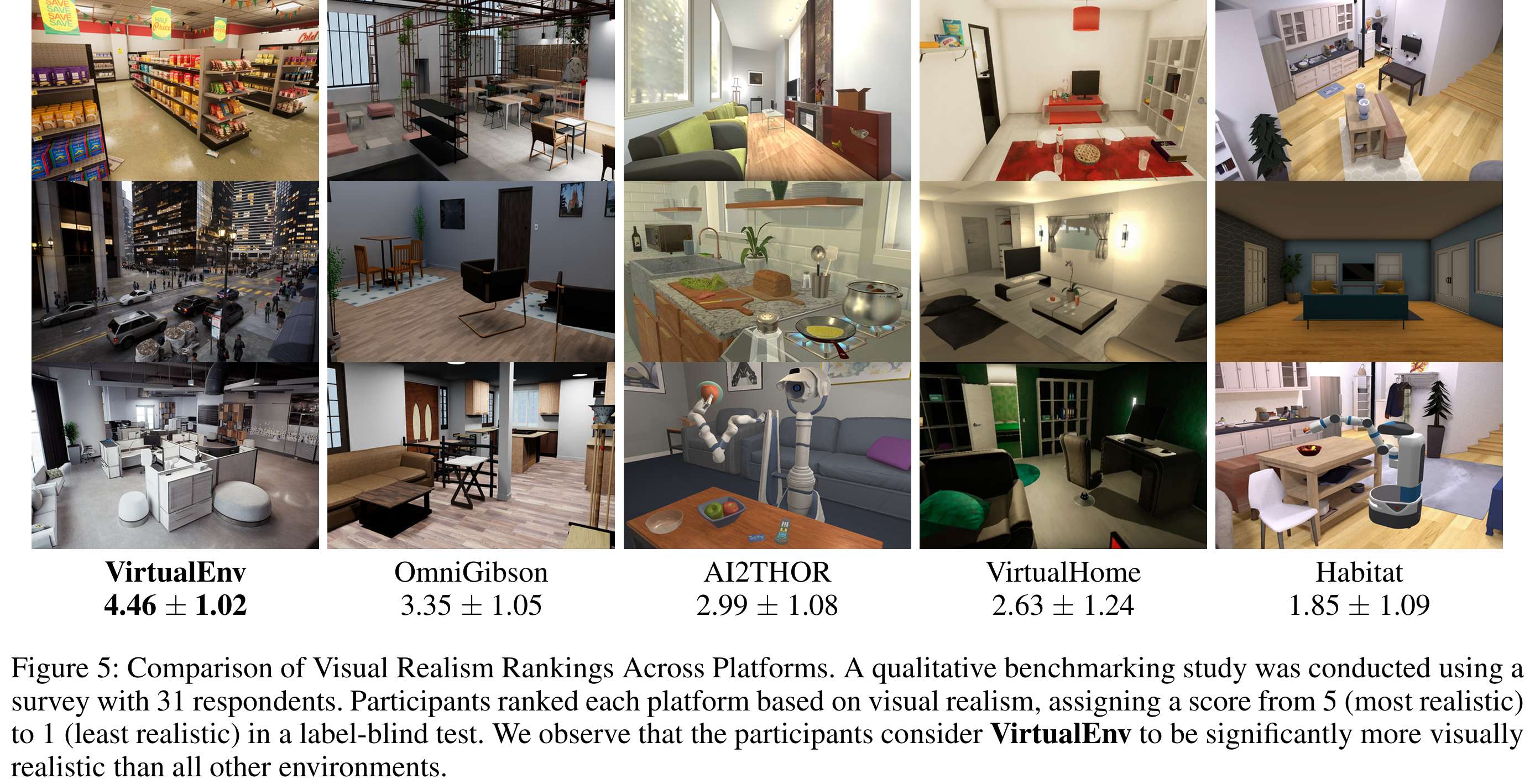
通过31名参与者的盲测实验,以1-5分(5分为最真实)对各平台视觉真实度评分,结果显示VirtualEnv以4.46±1.02的得分显著高于OmniGibson、AI2-THOR、VirtualHome和Habitat(figure 5),验证了其在环境真实感上的优势,为具身AI的视觉感知研究提供了可靠基础。
LLM性能对比
对比4种具备思维链能力的推理型LLM与4种基础型LLM在5类任务中的表现(table 2),核心发现:
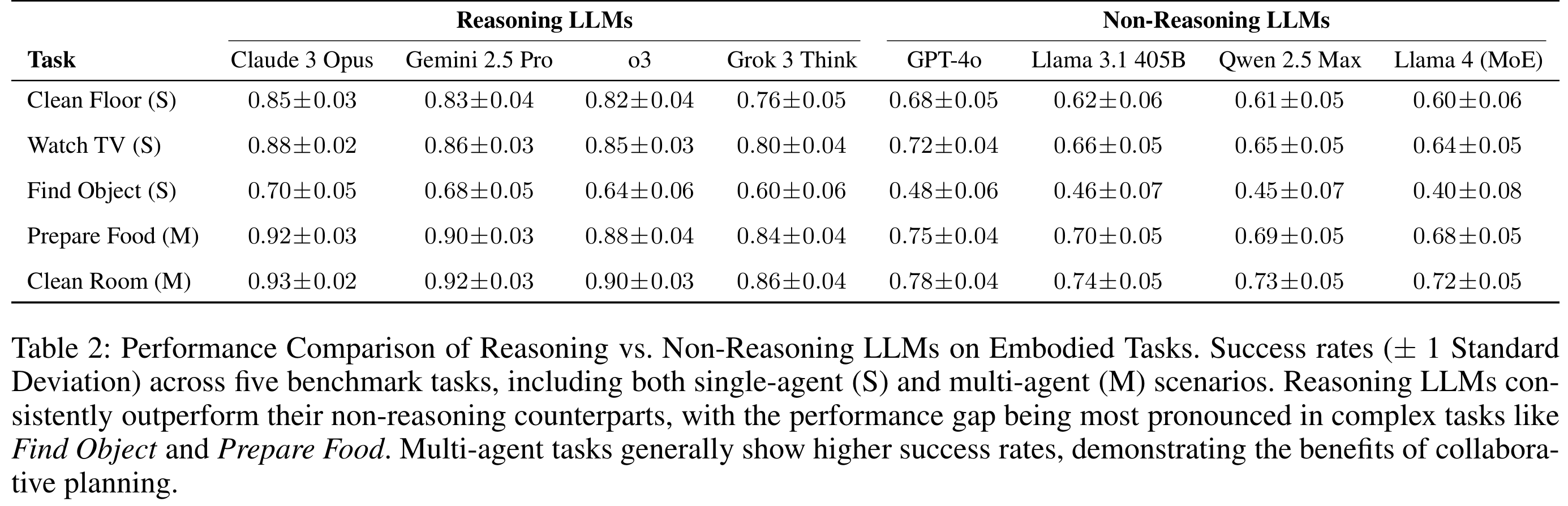
- 推理型LLM平均任务完成率提升11%,在复杂多步任务(如Find Object、Prepare Food)中优势尤为明显,且表现更稳定(常规任务标准差低于0.05),印证了结构化推理对任务分解和上下文维持的作用;
- 任务难度差异显著:Watch TV任务顶尖模型成功率超85%,而Find Object任务因需开放式搜索,成功率下降25个百分点,方差近乎翻倍(σ=0.06-0.08),说明部分可观测性仍是当前LLM驱动智能体的核心挑战;
- 多智能体协作提升效率:如Prepare Food任务中,Claude 3 Opus成功率从0.88提升至0.92,GPT-4o从0.68提升至0.75,核心原因是任务分工(如一方取餐具、一方操作厨具)减少了动作范围和遮挡带来的不确定性。
失败模式分析
归纳出6类主要失败模式(figure 6):
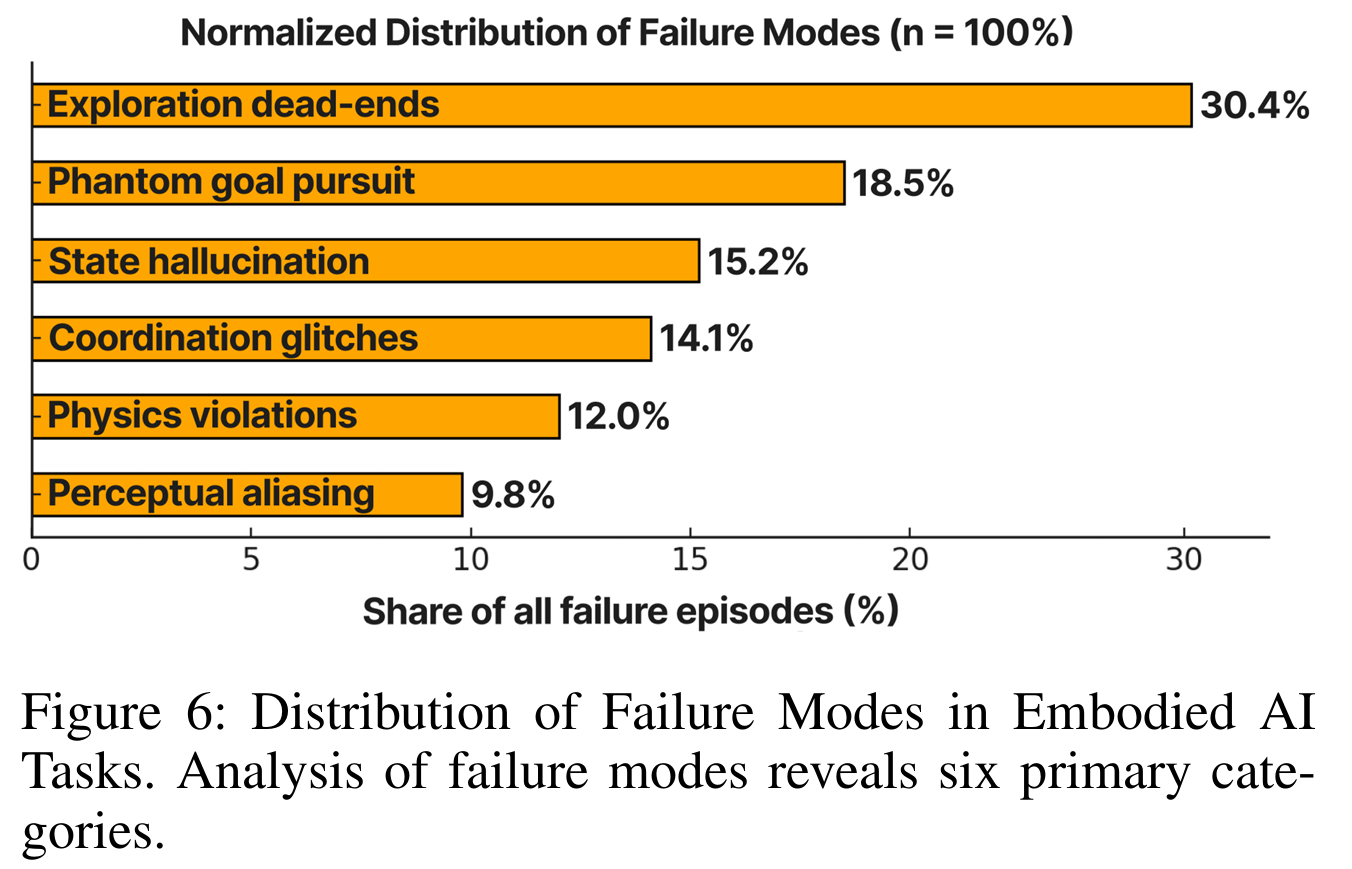
- 探索死胡同(30.4%):智能体反复访问同一区域,缺乏系统探索未知区域的策略;
- 虚幻目标追求(18.5%):规划过程脱离环境实际,追逐不存在的物体;
- 状态幻觉(15.2%):错误假设物体状态;
- 协作故障(14.1%):多智能体协调不当;
- 物理规则违反(12.0%):执行不可能的动作序列;
- 感知混淆(9.8%):混淆外观相似的物体。
前三大失败模式占比近三分之二,若针对性优化,有望将顶尖模型的任务成功率提升7.4%,接近人类在常规任务中的表现。
总结与价值
VirtualEnv通过Unreal Engine 5构建了一个高保真、强交互、多模态的具身AI仿真平台,核心价值体现在:
- 突破现有仿真器的场景和功能局限,支持室内-户外跨场景、多智能体协作、语言驱动的动态任务生成;
- 提供标准化测试床,实现LLM在具身场景中推理、规划、协作能力的可重复对比评估;
- 开源释放社区潜力,推动AI与游戏、仿真领域的交叉研究,为语言引导智能体、程序化任务生成、沉浸式仿真等方向提供基础架构。
未来,该平台有望成为具身AI研究的核心工具,加速LLM在真实交互场景中的落地,同时为交互式娱乐、机器人导航等应用提供技术支撑。
局限与未来方向
- 机器人本体适配性:当前仅在 LeRobot SO100 机械臂上验证,未来需扩展到更多类型机器人。
- 环境泛化性:实验环境与训练环境相似度高,需在更复杂、非结构化环境中测试。
- 摄像头视角多样性:当前正面摄像头为固定位置,未来需探索多视角动态调整以提升鲁棒性。
具身求职内推来啦
国内最大的具身智能全栈学习社区来啦!
推荐阅读
从零部署π0,π0.5!好用,高性价比!面向具身科研领域打造的轻量级机械臂
工业级真机教程+VLA算法实战(pi0/pi0.5/GR00T/世界模型等)
具身智能算法与落地平台来啦!国内首个面向科研及工业的全栈具身智能机械臂
VLA/VLA+触觉/VLA+RL/具身世界模型等!具身大脑+小脑算法与实战全栈路线来啦~
MuJoCo具身智能实战:从零基础到强化学习与Sim2Real
Diffusion Policy在具身智能领域是怎么应用的?为什么如此重要?