模型预测控制(MPC)在混合动力汽车能量管理策略开发上的运用。 利用车速预测模型(BP或者RBF神经网络,预测模型资料也有发在其他链接)根据预测的信息对车辆进行优化控制,可以对混动汽车的能量管理具有一定的参考意义。 动态规划算法作为全局优化的代表,恰好作为模型预测控制的算法求解器,再与车速预测模型结合实现基于模型预测(MPC)的能量管理策略的预测时预内的局部最优近似全局最优的优化效果,实现混动车辆的燃油经济性最优! ------和模型预测MPC结合运用,加上预测模型可实现在线预测近似实时最优!!(本人编写DP就是与MPC相结合) 逆向迭代,正向求解(混动整车能量管理做到全局最优) ------(动态规划网上找不到资料,1000多行的代码) ------代码全是硬货,理解了自己就可以运用到自己优化的整车上,SCI/EI论文轻松拿下,本人发表2篇SCI一区全靠它,只要搞懂随随便便出论文! 提供动态规划算法程序(DP)?神经网络预测模型程序(GA-BP/RBF)=模型预测控制(MPC)------识货的大神欢迎咨询交流!*参考论文有需要也可提供
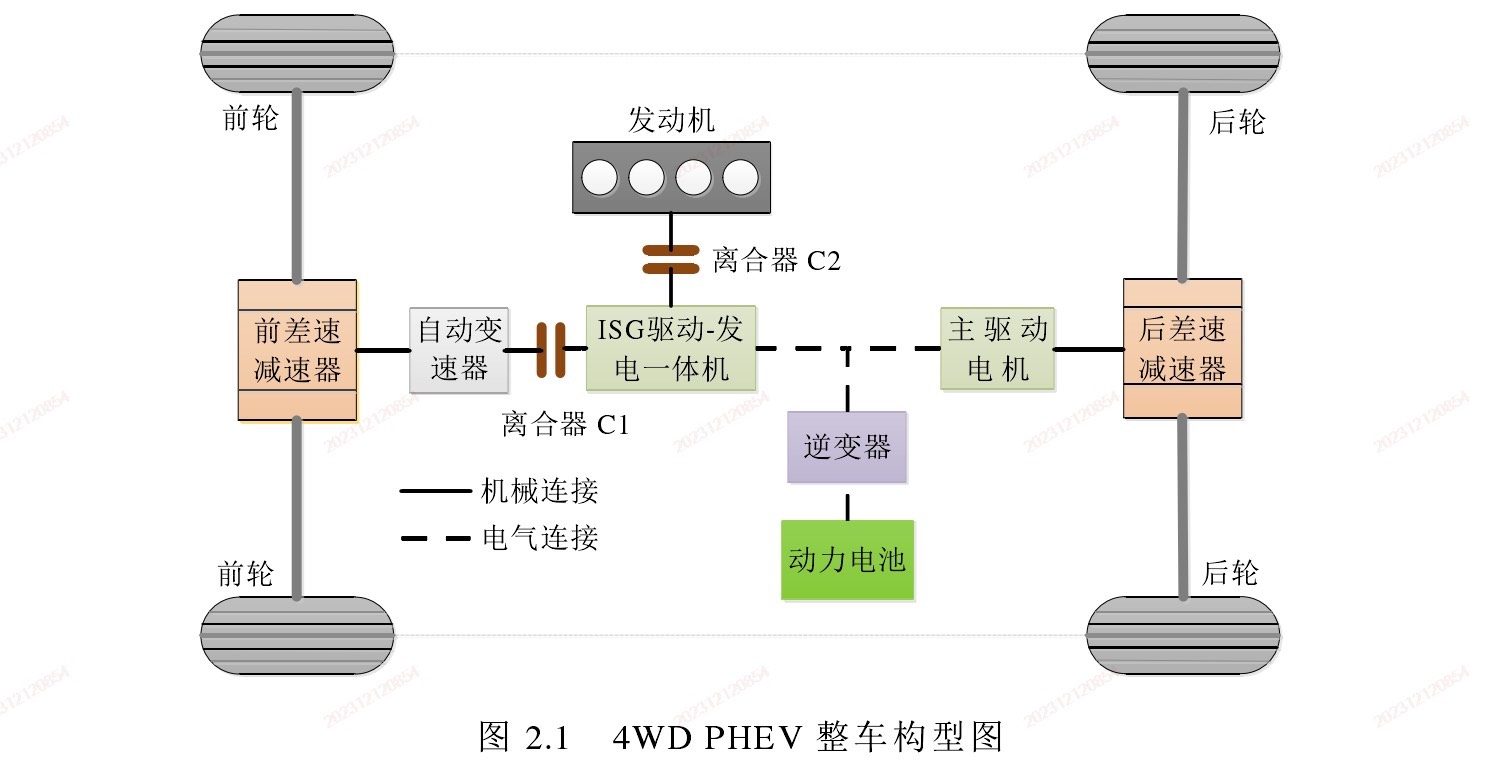
在汽车行业向新能源转型的浪潮中,混合动力汽车凭借其独特优势,成为当下研究的热点。而其中能量管理策略的优化,更是提升混动汽车性能与燃油经济性的关键所在。今天咱们就来唠唠模型预测控制(MPC)在混合动力汽车能量管理策略开发中的巧妙运用。
一、预测的力量:车速预测模型
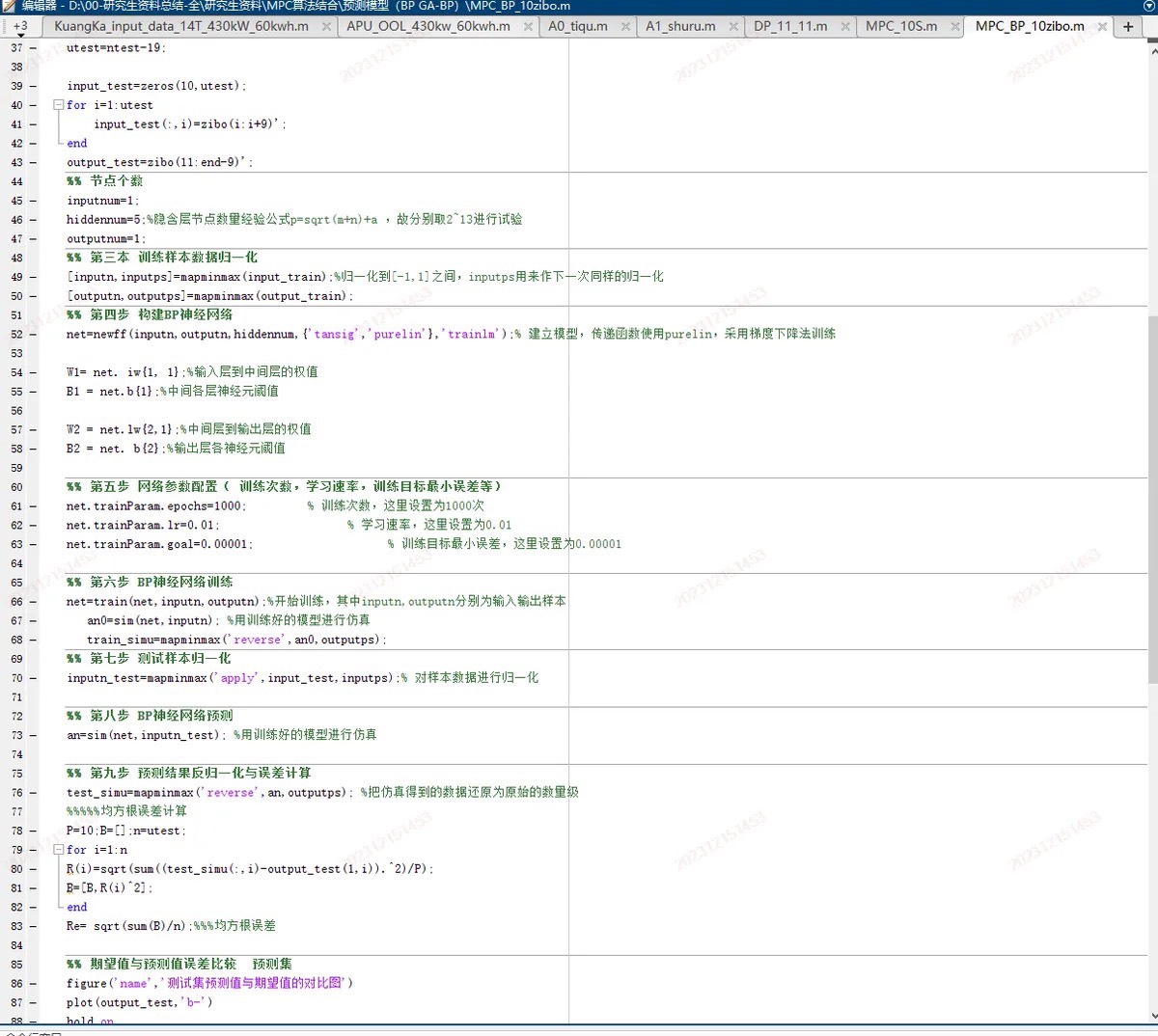
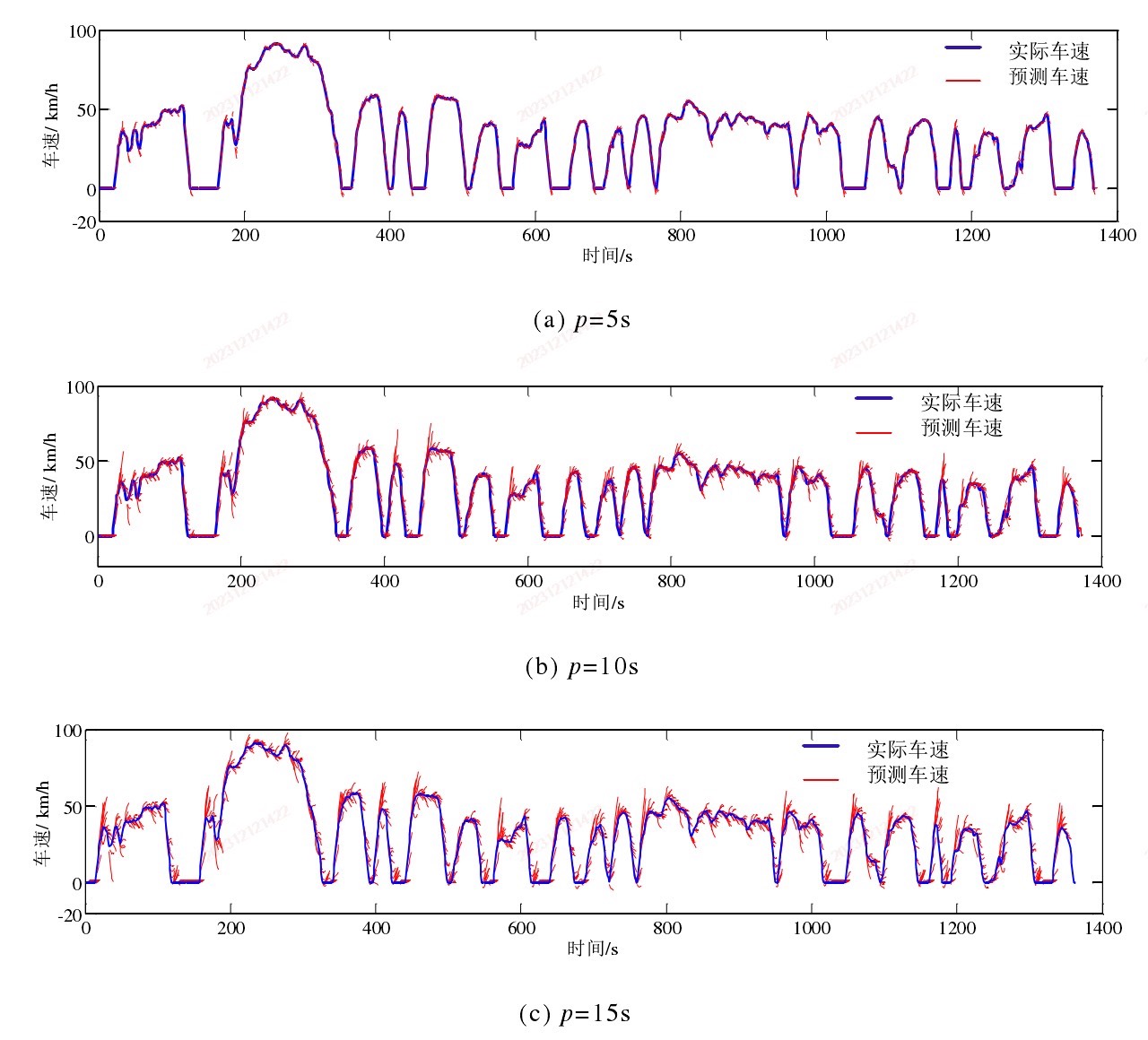
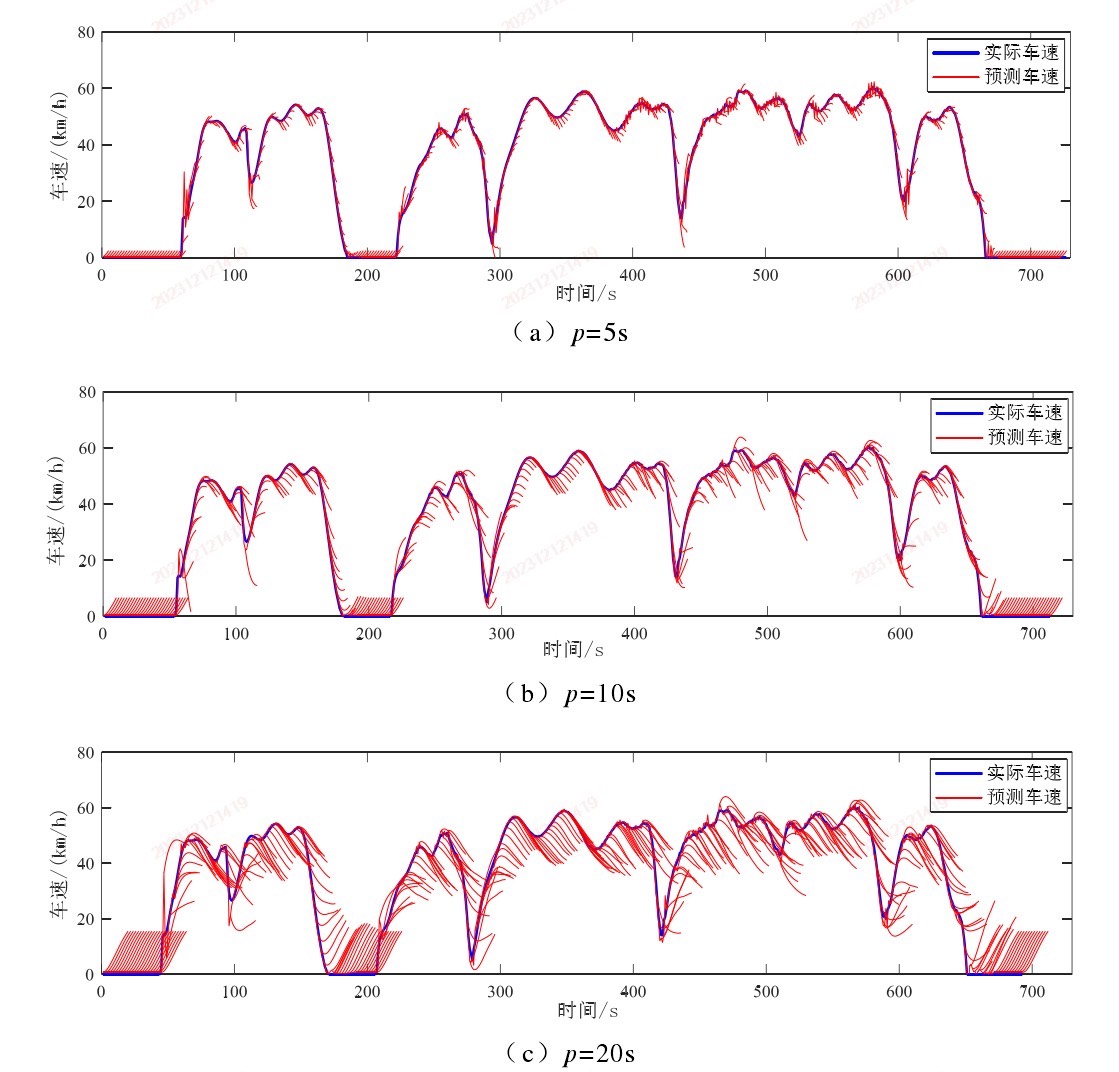
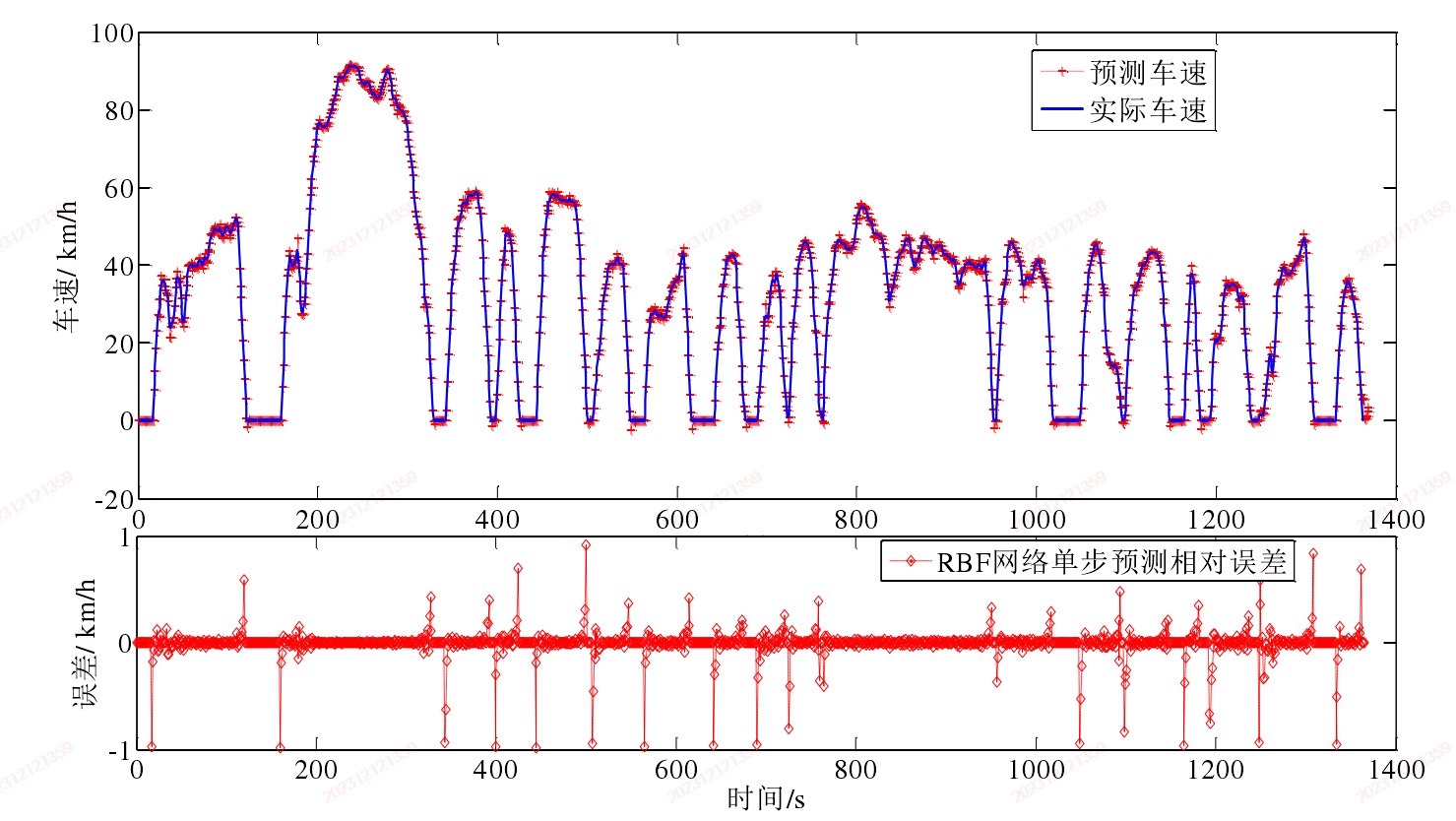
咱们先从车速预测模型说起,这里可以选用 BP 或者 RBF 神经网络。这就好比给汽车装上了一双"未来之眼",通过预测车速等信息,为后续的优化控制提供依据。比如说 BP 神经网络,它是一种按照误差逆向传播算法训练的多层前馈神经网络。简单来说,就像咱们上学时做错题,要分析错误原因,然后调整学习方法一样。BP 神经网络会根据预测结果和实际结果的误差,反向调整各层神经元的权重,让预测越来越准。
下面简单贴一段 BP 神经网络预测车速的代码示例(伪代码):
python
import numpy as np
# 定义 BP 神经网络结构
input_layer_size = 10 # 输入层神经元数量,可根据实际特征调整
hidden_layer_size = 5 # 隐藏层神经元数量
output_layer_size = 1 # 输出层神经元数量,即预测的车速
# 初始化权重
weights_1 = np.random.randn(input_layer_size, hidden_layer_size)
weights_2 = np.random.randn(hidden_layer_size, output_layer_size)
# 激活函数,这里选用 Sigmoid 函数
def sigmoid(x):
return 1 / (1 + np.exp(-x))
# 前向传播
def forward_propagation(X):
hidden_layer = sigmoid(np.dot(X, weights_1))
output_layer = sigmoid(np.dot(hidden_layer, weights_2))
return output_layer
# 假设这里有训练数据 X(特征矩阵)和 y(实际车速)
X = np.random.randn(100, input_layer_size)
y = np.random.randn(100, 1)
# 训练过程,这里简化,只做一次前向传播和误差计算
output = forward_propagation(X)
error = y - output这段代码中,首先定义了神经网络的结构,然后初始化权重。通过前向传播函数,将输入数据经过隐藏层处理后得到预测的车速。当然,实际应用中还需要进行大量的训练和优化步骤,才能让这个模型真正发挥作用。
二、优化的核心:动态规划与模型预测控制结合
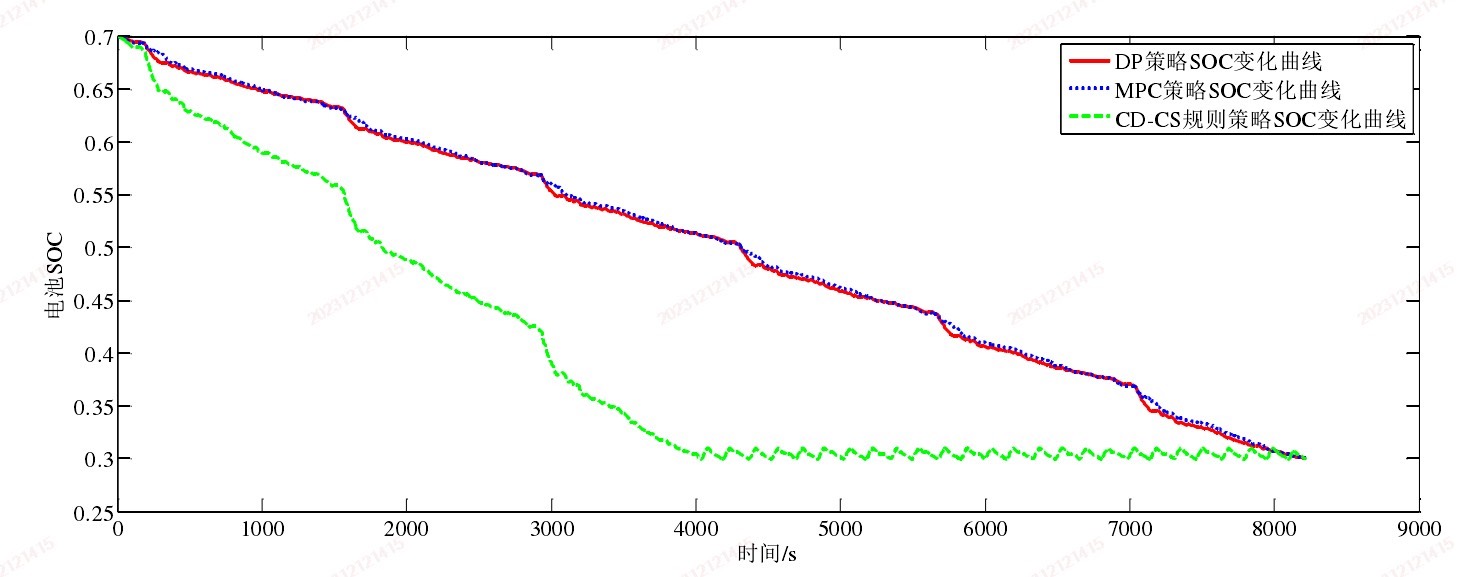
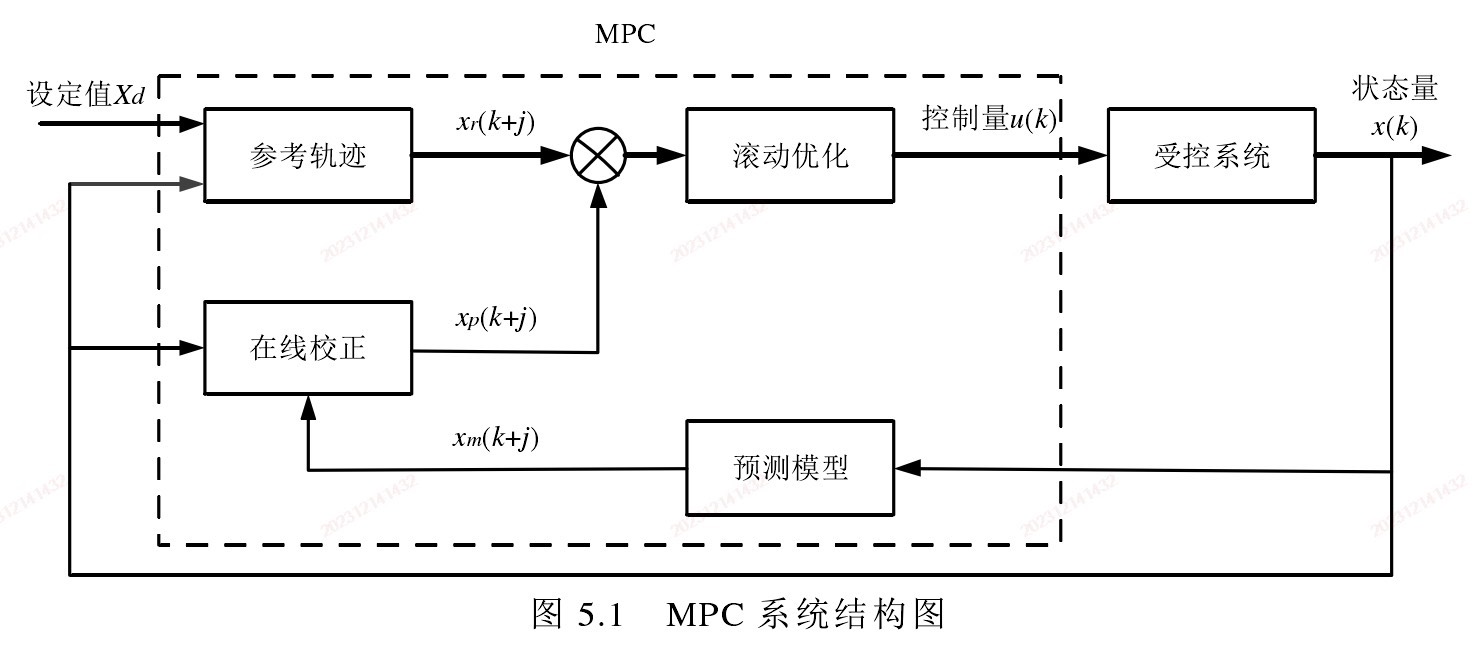
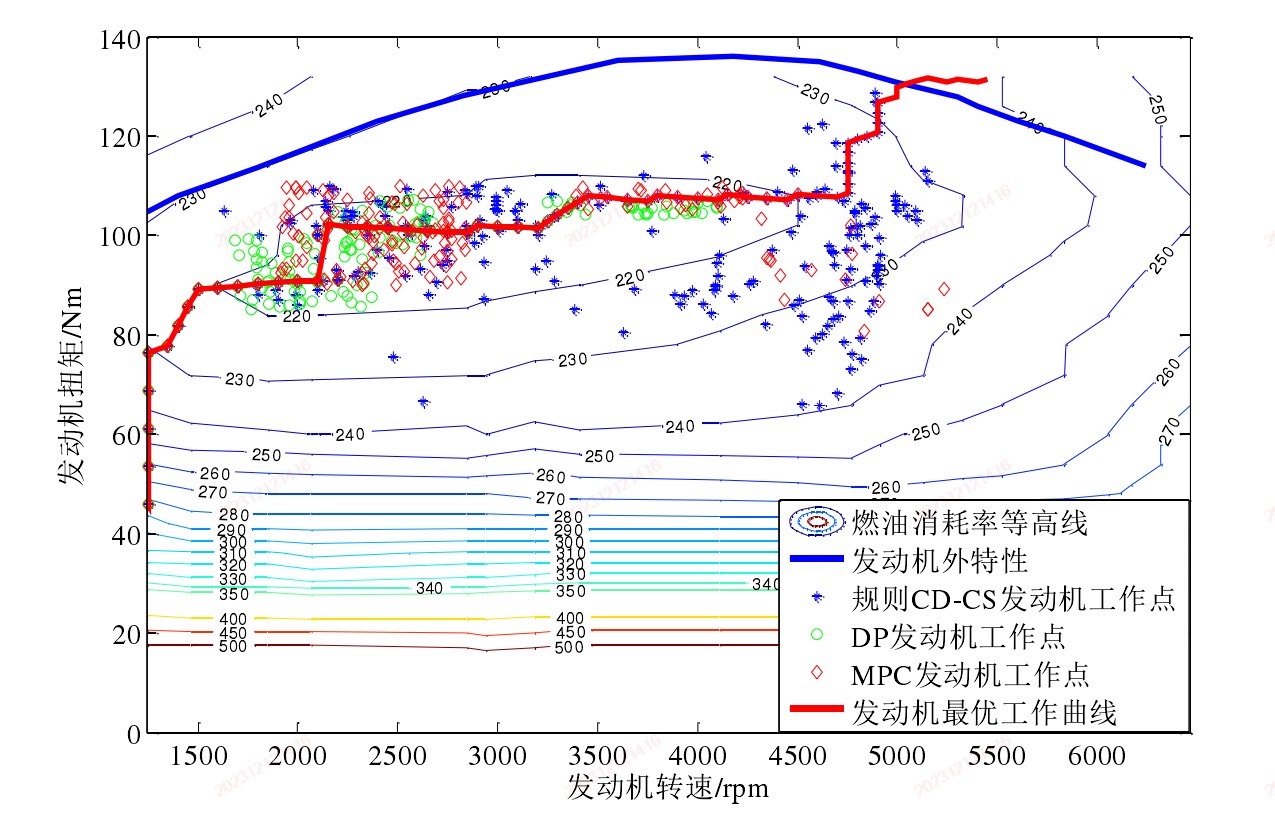
动态规划算法作为全局优化的扛把子,在这儿扮演着重要角色,它就像一个超级智囊,能在众多可能性中找到最优路径。在混动汽车能量管理里,动态规划算法作为模型预测控制的算法求解器,和车速预测模型强强联合,实现基于模型预测(MPC)的能量管理策略。
它的神奇之处在于,在预测时域内找到局部最优解,而且这个局部最优解还能近似全局最优,最终实现混动车辆燃油经济性的最大化。这里就涉及到逆向迭代,正向求解的过程。逆向迭代的时候,从最后一个时间点开始,逐步往前计算每个状态下的最优决策。就像玩迷宫,从出口往回找路,这样就能找到一条最优路径。正向求解则是根据逆向迭代得到的最优策略,在实际运行中让车辆按照这个策略进行能量分配。
这里我手头有 1000 多行动态规划的代码,全是实打实的干货。虽然网上很难找到相关资料,但只要你理解了这些代码,运用到自己优化的整车上,那可不得了。就像我自己,靠着这些代码发表了 2 篇 SCI 一区论文。简单贴一小段动态规划代码思路(伪代码):
python
# 假设车辆行驶状态有多个,这里简化为两个状态:行驶和停止
num_states = 2
num_time_steps = 10 # 假设预测时域有 10 个时间步
# 初始化成本矩阵,用来存储每个状态在每个时间步的成本
cost_matrix = np.zeros((num_states, num_time_steps))
# 假设每个状态转移的成本函数
def cost_function(state, next_state, time_step):
# 这里简单返回一个随机成本值,实际要根据车辆动力学等计算
return np.random.randn()
# 逆向迭代
for t in range(num_time_steps - 2, -1, -1):
for s in range(num_states):
min_cost = float('inf')
for next_s in range(num_states):
cost = cost_function(s, next_s, t) + cost_matrix[next_s, t + 1]
if cost < min_cost:
min_cost = cost
cost_matrix[s, t] = min_cost
# 正向求解,根据逆向迭代得到的成本矩阵选择最优策略
optimal_policy = []
current_state = 0 # 假设初始状态为 0
for t in range(num_time_steps):
optimal_policy.append(current_state)
min_cost = float('inf')
best_next_state = None
for next_s in range(num_states):
cost = cost_function(current_state, next_s, t) + cost_matrix[next_s, t + 1]
if cost < min_cost:
min_cost = cost
best_next_state = next_s
current_state = best_next_state这段代码展示了动态规划逆向迭代和正向求解的大致过程。通过逆向迭代计算每个状态在每个时间步的最小成本,然后正向求解得出最优策略。当然,实际的混动汽车能量管理中,状态和成本函数的计算会复杂得多。
三、实时最优:在线预测的魅力
当把模型预测控制(MPC)和预测模型结合起来,就能实现超厉害的在线预测,近似达到实时最优。想象一下,车辆在行驶过程中,能根据实时预测的信息,动态调整能量管理策略,始终保持在最佳的燃油经济性状态。这就好比你开车的时候,有个智能助手时刻根据路况和未来趋势,告诉你怎么开最省油。
要是有识货的大神对这方面感兴趣,欢迎一起交流。我这儿不仅提供动态规划算法程序(DP)、神经网络预测模型程序(GA - BP/RBF),参考论文有需要也能提供。说不定咱们一起交流交流,又能碰撞出更多优化混动汽车能量管理的火花,让更多的 SCI/EI 论文诞生呢!
以上就是关于模型预测控制(MPC)在混合动力汽车能量管理策略开发运用的一些分享,希望能给各位在这个领域探索的小伙伴一些启发!