目录
1.摘要
空地跨域无人集群在军事侦察、灾害救援等应用中具有重要价值,但其在复杂动态环境下面临异构协同与动态避障等路径规划难题。针对上述问题,本文提出一种受狼群行为启发的目标引导自适应路径规划方法(TAPP),通过并行图搜索与目标信息动态融合引导个体决策,并结合基于动态优先级的局部避障机制,在避免运动冲突的同时提升集群执行效率。仿真与对比实验结果表明,该方法在计算效率、路径质量和环境适应性方面具有显著优势,尤其适用于大规模、高动态的空地跨域无人集群任务,具备良好的应用前景。
2.路径规划模型
在城市作战环境中,一支由无人机(UAV)与无人地面车辆(UGV)组成的空地跨域无人集群需要在广域范围内执行多目标任务。所有无人平台从同一集结点出发,目标分配已完成。核心问题是在满足物理约束和作战条件的前提下,为各无人平台规划最优运动路径,以协调异构平台协同行动,兼顾环境复杂性与任务时效性,从而最大化集群整体效能并确保任务顺利完成。
采用栅格化方法对城市环境进行建模,基于 DEM 将连续空间离散为二维或三维网格。针对 UGV 与 UAV 的不同运动特性,分别构建二维可通行栅格与三维空域栅格,并通过障碍物膨胀引入安全裕度、简化运动约束。栅格分辨率在路径精度与计算效率之间权衡确定,从而为高效、安全的路径规划提供统一环境模型。
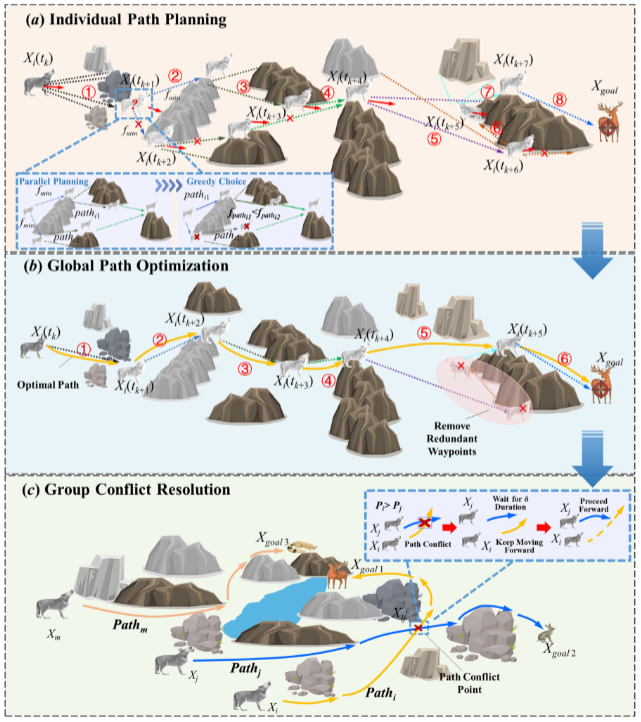
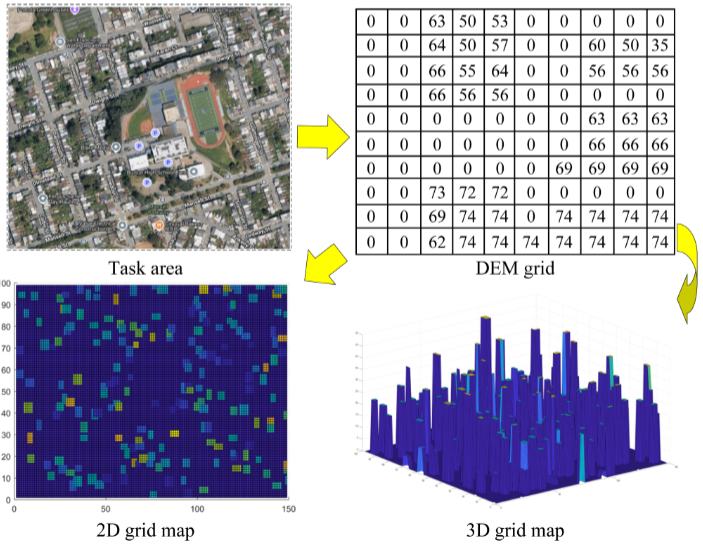
以狼群围猎行为为启发,将无人平台视为独立个体,在目标方向引导下进行路径规划。个体优先采用直达目标的可视路径,受阻时通过并行图搜索扩展节点,并结合父节点重连持续优化路径代价;在代价相同情况下保留多条等价路径以增强鲁棒性。
为模拟狼群的层级协作机制,论文为每个个体分配动态优先级,高优先级个体在路径冲突中享有通行权。当路径发生潜在冲突时,系统按优先级顺序进行检测,并通过结合空间安全距离与时间错峰的方式判断是否构成真实冲突。若冲突成立,低优先级个体在当前节点进行时间等待,让高优先级个体先行,从而实现无碰撞通行;若无冲突,则保持原路径不变。对于执行同一任务的个体,冲突时采用编队协同而非避让策略;当感知到动态障碍物时,则通过短暂停留与局部重规划进行规避。
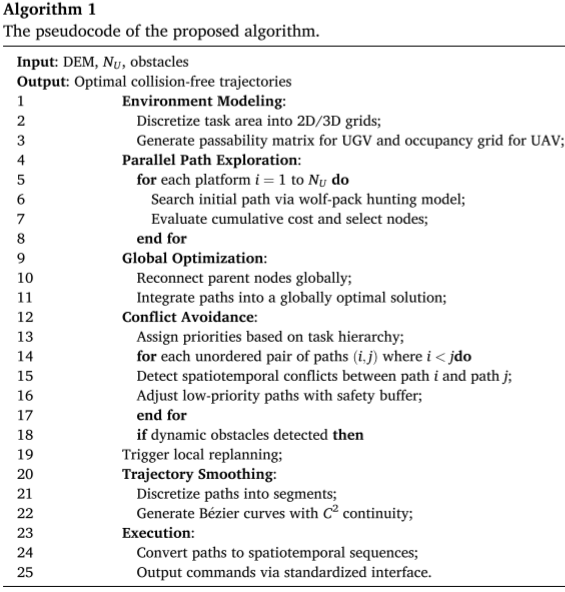
4.算法框架
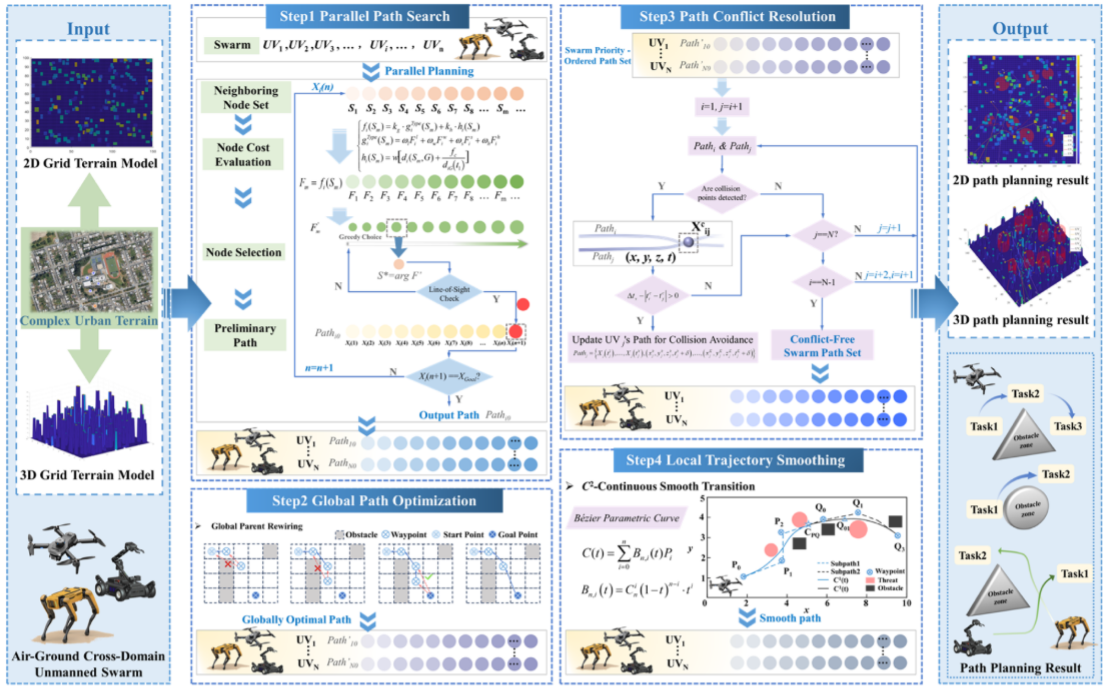
首先基于 DEM 对任务环境进行离散建模,分别形成适用于 UGV 的二维可通行栅格与适用于 UAV 的三维占据网格;随后采用并行个体规划机制生成初始路径,并通过全局节点重连进行整体优化。在集群层面,引入基于任务优先级的时空冲突消解策略,结合实时感知实现动态重规划。最终利用具有 C² 连续性的 Bézier 曲线对轨迹进行局部平滑,生成满足平台动力学约束的时空轨迹并输出执行,从而实现安全、高效、协同的无人集群路径规划。
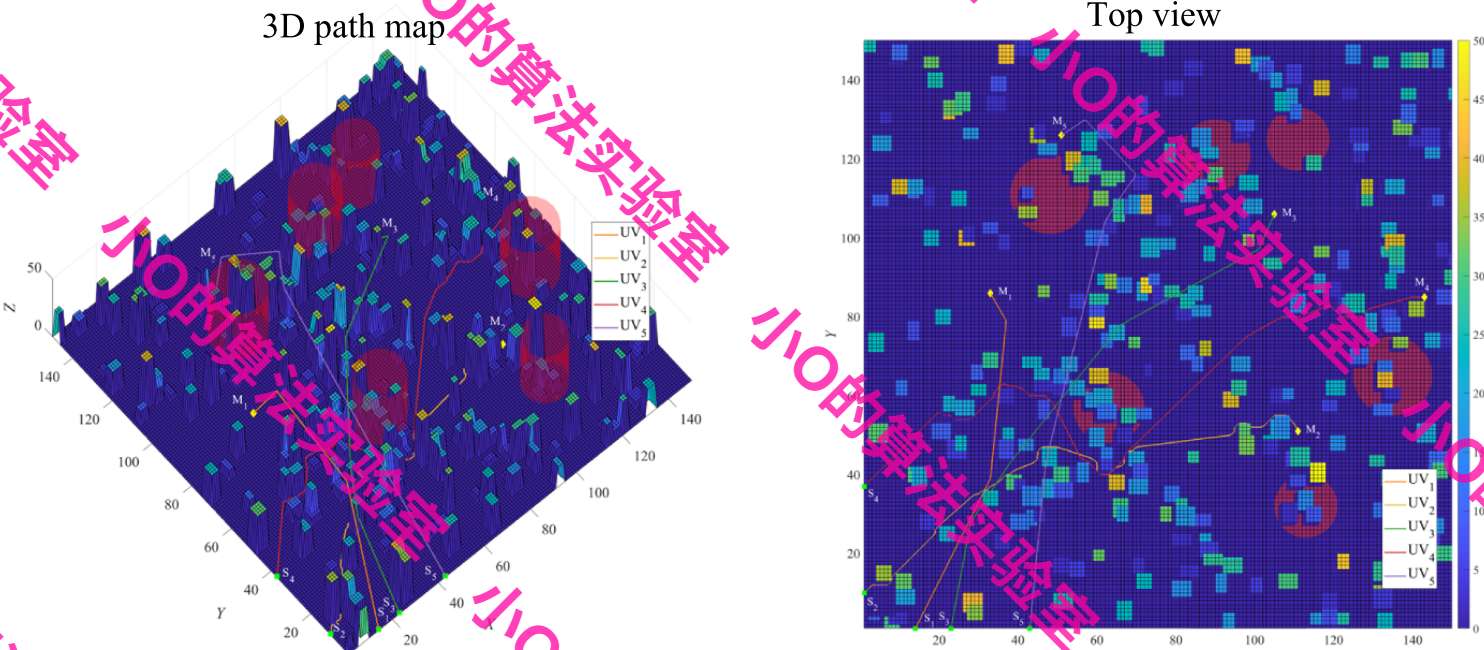
5.结果展示
6.参考文献
1 Peng Q, Wu H, Zhan R, et al. A target-guided adaptive path planning method for air-ground cross-domain unmanned swarmJ. Swarm and Evolutionary Computation, 2026, 100: 102220.
7.代码获取
xx
8.算法辅导·应用定制·读者交流
xx