目录
[六、实验效果 编辑](#六、实验效果 编辑)
一、前言
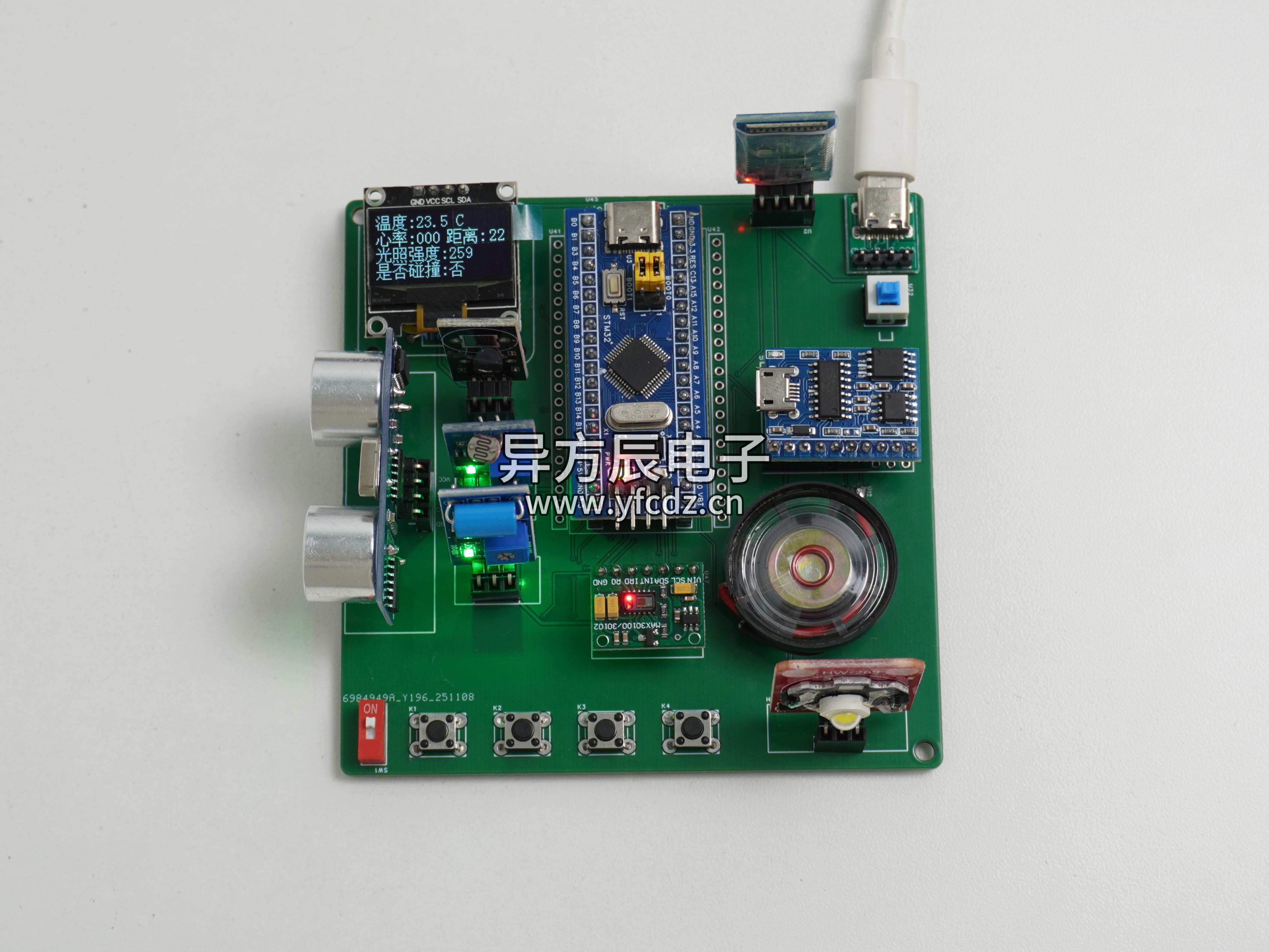
项目成品图片:
哔哩哔哩视频链接:
https://www.bilibili.com/video/BV1puCyBTEH9/?spm_id_from=333.1387.upload.video_card.click
(资料分享见文末)
二、项目简介
1.功能详解
基于STM32的智能头盔
功能如下:
- 环境采集:采集环境光照强度、与后方车辆距离、人体心率、人体体温、车辆碰撞情况
- 显示功能:环境数据显示在OLED屏幕上
- 模式切换:通过按键可以切换手动模式和自动模式
- 自动模式:自动模式下光照低于阈值开启照明灯;体温超过阈值蜂鸣器报警;心率超过阈值蜂鸣器报警、震动模块检测是否和前车发生碰撞,如果碰撞则语音播报"请注意安全";超声波检测与后方车辆距离,如果距离小于阈值则语音播报"请注意后方来车"
- 手动模式:手动模式下可通过按键控制照明灯、蜂鸣器报警
- 阈值调节可设置环境光照阈值、体温阈值、心率阈值、车辆距离阈值
- 蓝牙APP:通过蓝牙连接手机APP,可通过APP查看接收信息数据与控制指令下发,其中按钮对应字母为:模式(A)、灯光(B)、报警(C)
2.主要器件
- STM32F103C8T6最小系统板
- OLED显示屏(4针IIC协议)
- 光敏传感器
- 超声波传感器
- MAX30102心率
- DS18B20温度
- MPU6050陀螺仪
- JR6001语音
- 蜂鸣器
- LED灯
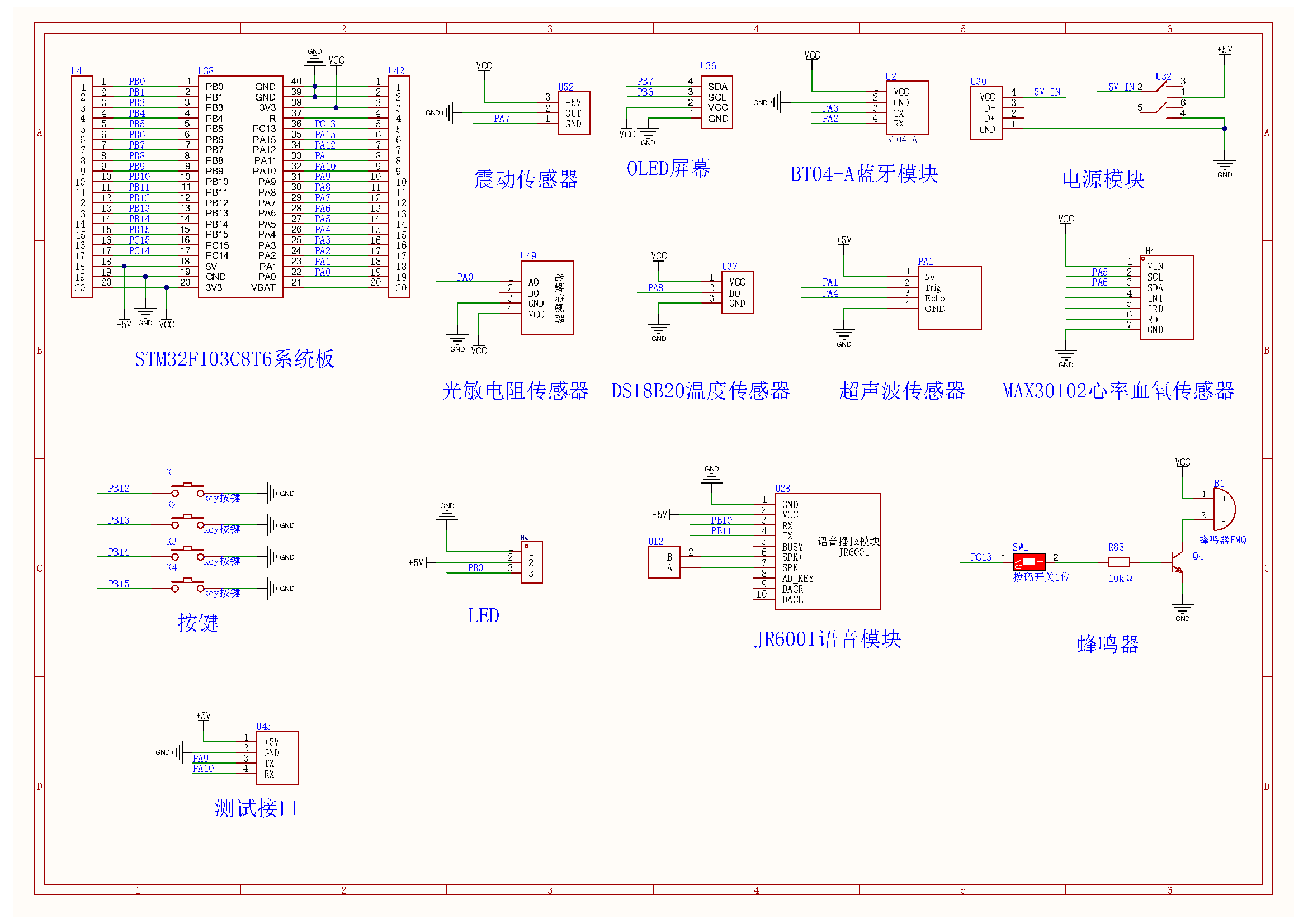
三、原理图设计
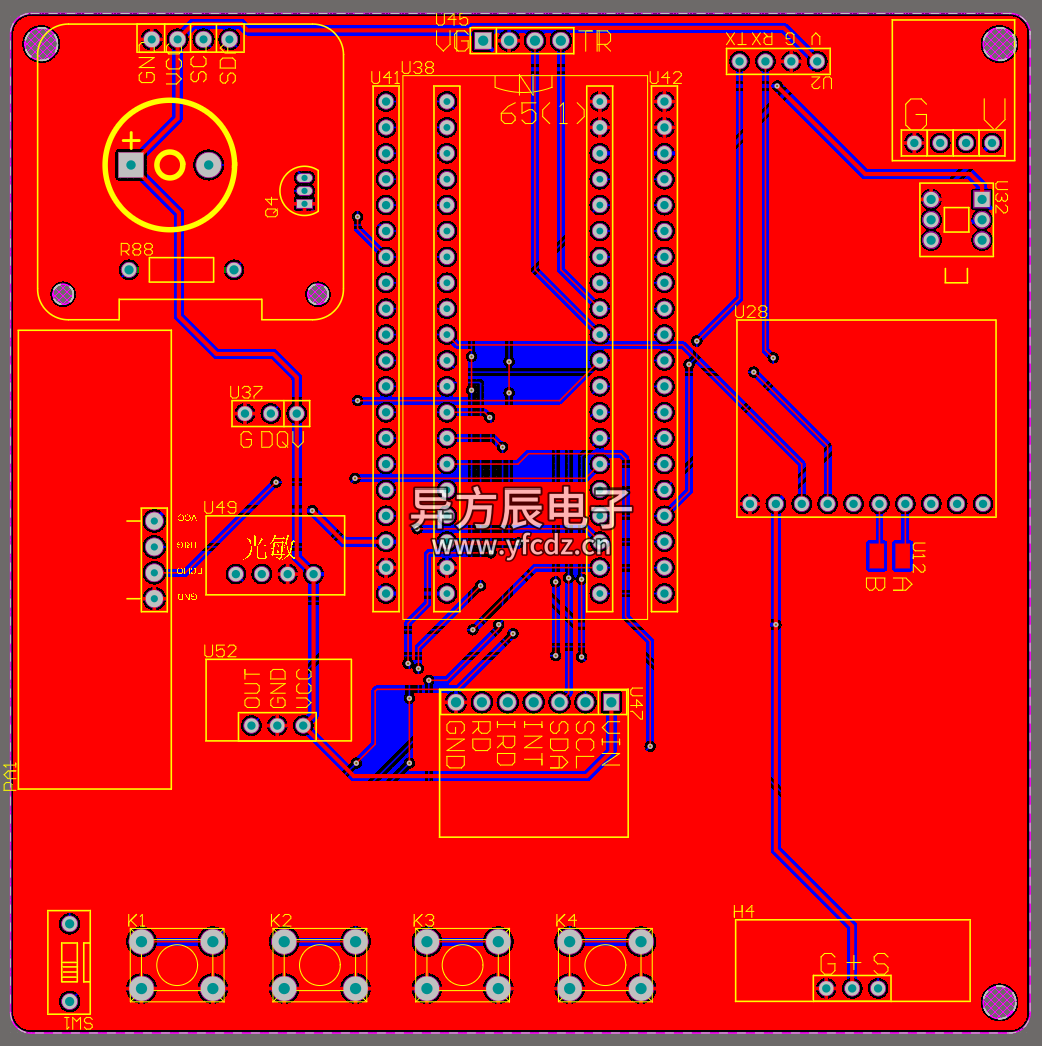
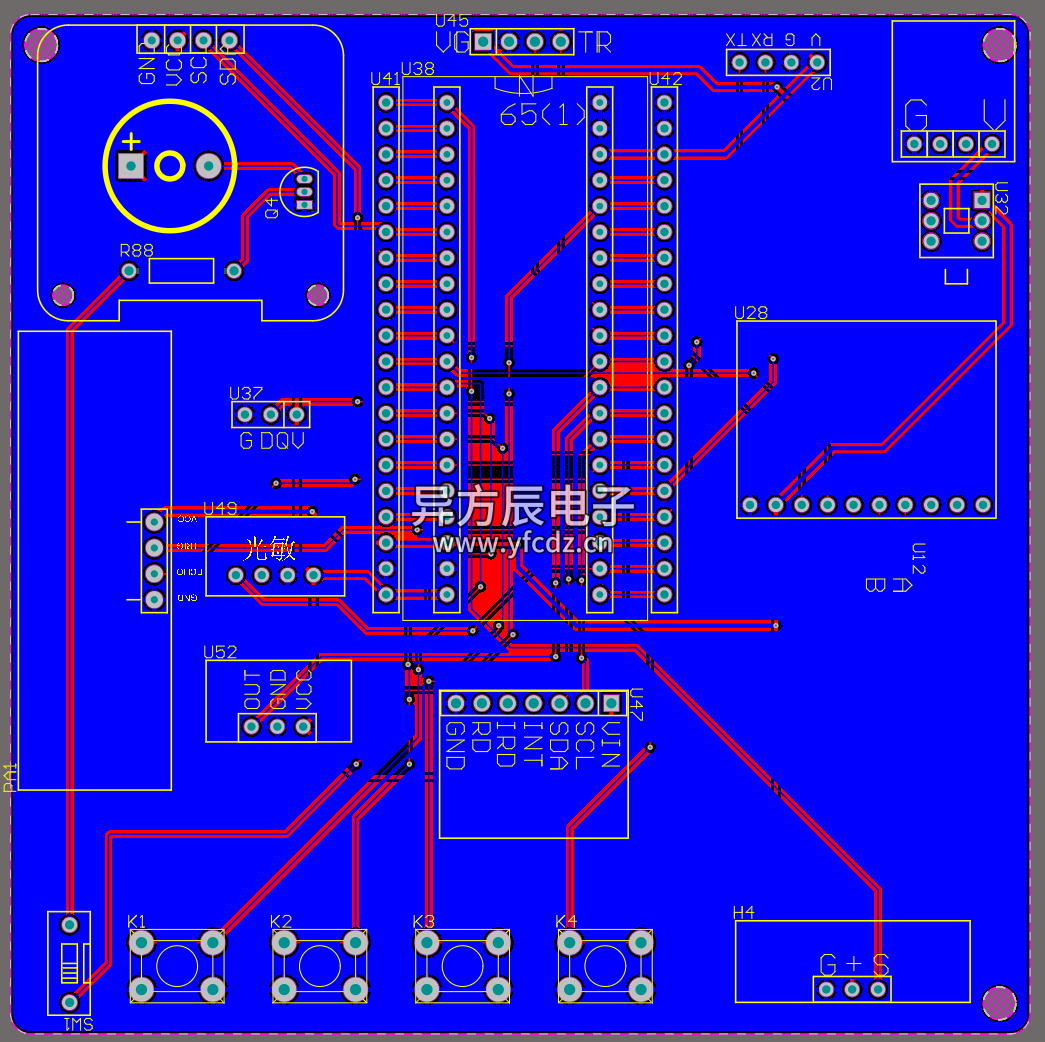
四、PCB硬件设计
PCB图
五、程序设计
cpp
#include "stm32f10x.h"
#include "led.h"
#include "beep.h"
#include "usart.h"
#include "delay.h"
#include "oled.h"
#include "key.h"
#include "Modules.h"
#include "TIM2.h"
#include "adcx.h"
#include "flash.h"
#include "usart2.h"
#include "usart3.h"
#include "max30102_read.h"
#include "myiic.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "ds18b20.h"
#include "string.h"
#include "ultrasonic.h"
#include "timer.h"
#include "vibration.h"
/****************异方辰电子工作室******************
STM32
*文件 : STM32智能头盔
*版本 : V1.0
*日期 : 2025.11.07
*MCU : STM32F103C8T6
*接口 : 见代码
*BILIBILI : 异方辰电子
*小红书 : 异方辰电子
*CSDN : 异方辰电子
*授权IP : 辰哥单片机设计、异方辰、YFC电子、北海单片机设计
**********************BEGIN***********************/
#define KEY_Long1 11
#define KEY_1 1
#define KEY_2 2
#define KEY_3 3
#define KEY_4 4
#define FLASH_START_ADDR 0x0801f000 //写入的起始地址
SensorModules sensorData; //声明传感器数据结构体变量
SensorThresholdValue Sensorthreshold; //声明传感器阈值结构体变量
DriveModules driveData; //声明驱动器状态结构体变量
uint8_t mode = 1; //系统模式 1自动 2手动 3设置
u8 dakai;//串口3使用的传递变量
u8 Flag_dakai;//串口3接收标志位
uint8_t is_secondary_menu = 0; // 0一级菜单,1二级菜单
uint8_t secondary_pos = 1; // 二级菜单光标位置(1-3对应时/分/秒)
uint8_t secondary_type = 0; // 二级菜单类型:0=RTC时间,1=定时开启,2=定时关闭
uint8_t send_data[] = "A7:00001";//语音播放曲目1
uint8_t send_data1[] = "A7:00002";//语音播放曲目2
extern unsigned char p[16];
short temperature = 0;
//系统静态变量
//static uint8_t count_a = 1; //自动模式按键数
static uint8_t count_m = 1; //手动模式按键数
static uint8_t count_s = 1; //设置模式按键数
//static uint8_t last_mode = 0; // 记录上一次的模式
//static uint8_t last_count_s = 0; // 记录设置模式内上一次的页面
/**
* @brief 显示菜单内容
* @param 无
* @retval 无
*/
enum
{
AUTO_MODE = 1,
MANUAL_MODE,
SETTINGS_MODE
}MODE_PAGES;
int main(void)
{
SystemInit();//配置系统时钟为72M
delay_init(72); // 系统时钟72MHz
ADCX_Init();
LED_Init();
BEEP_Init();
BEEP_OFF;
USART1_Config();//串口1初始化PC
USART2_Init(); //串口3初始化蓝牙
USART3_Config();//串口2初始化//语音模块
Key_Init();
Init_MAX30102();//心率初始化
OLED_Init();
DS18B20_Init();//温度初始化
OLED_Clear();//清屏
Ultrasonic_Init();//超声波初始化
srand((unsigned int)delay_get_tick()); // 使用系统时间作为随机数种子
//flash读取
delay_ms(100);
FLASH_ReadThreshold();
vib_init();
// 添加的状态管理变量
static uint8_t last_mode = 0; // 记录上一次模式
static uint32_t last_sensor_time = 0; // 传感器扫描时间控制
static uint32_t last_display_time = 0; // 显示刷新时间控制
//超过以下值,恢复默认阈值
if (Sensorthreshold.tempValue > 40 || Sensorthreshold.hrAvgValue >120 ||
Sensorthreshold.distanceValue > 100 || Sensorthreshold.luxValue > 500)
{
FLASH_W(FLASH_START_ADDR, 30, 80, 100, 10);
FLASH_ReadThreshold();
}
TIM2_Init(72-1,1000-1); // 2ms定时中断
printf("Start \n");
USART3_SendString("AF:30"); //音量调到最大
delay_ms(300);
USART3_SendString("A7:00003"); //欢迎使用
while (1)
{
// ==================== 优先处理按键和通信 ====================
USART2_ProcessCmd(); // 先处理串口命令
// ==================== 获取当前系统时间 ====================
uint32_t current_time = delay_get_tick(); // 使用系统滴答计数
// ==================== 优化传感器扫描频率 ====================
if(current_time - last_sensor_time > 100) // 每200ms扫描一次传感器 (100 * 2ms = 200ms)
{
SensorScan(); //获取传感器数据
last_sensor_time = current_time;
}
// ==================== 立即处理按键 ====================
uint8_t current_key_num = KeyNum; // 保存当前按键值
// 模式切换按键立即处理
if(current_key_num != 0)
{
switch(mode)
{
case AUTO_MODE:
if(current_key_num == KEY_1)
{
mode = MANUAL_MODE;
count_m = 1;
// 切换到手动模式时关闭灯和蜂鸣器
driveData.LED_Flag = 0;
driveData.BEEP_Flag = 0;
KeyNum = 0; // 立即清除按键
}
else if(current_key_num == KEY_Long1)
{
mode = SETTINGS_MODE;
count_s = 1;
KeyNum = 0; // 立即清除按键
}
break;
case MANUAL_MODE:
if(current_key_num == KEY_1)
{
mode = AUTO_MODE;
KeyNum = 0; // 立即清除按键
}
break;
case SETTINGS_MODE:
// 设置模式内部按键在各自模式中处理
break;
}
}
// ==================== 模式切换优化 ====================
if(last_mode != mode)
{
OLED_Clear();
last_mode = mode;
// 立即绘制新模式的固定内容
switch(mode)
{
case AUTO_MODE:
OLED_autoPage1();
break;
case MANUAL_MODE:
OLED_manualPage1();
break;
case SETTINGS_MODE:
OLED_settingsPage1();
break;
}
OLED_Refresh(); // 立即刷新显示
}
// ==================== 模式处理 ====================
switch(mode)
{
case AUTO_MODE:
// 直接调用显示,不使用SetAuto()
SensorDataDisplay1(); //显示传感器1数据
AutoControl();
Control_Manager();
break;
case MANUAL_MODE:
{
static uint8_t manual_page_initialized = 0;
static uint8_t last_manual_count = 0;
static uint8_t last_LED_Flag = 0;
static uint8_t last_BEEP_Flag = 0;
static uint8_t force_refresh = 0; // 强制刷新标志
// 模式切换时重新初始化
if(last_mode != mode)
{
manual_page_initialized = 0;
last_manual_count = 0;
last_LED_Flag = driveData.LED_Flag;
last_BEEP_Flag = driveData.BEEP_Flag;
force_refresh = 1; // 设置强制刷新标志
// 确保光标指向灯光
count_m = 1;
// 确保设备状态为关
driveData.LED_Flag = 0;
driveData.BEEP_Flag = 0;
}
uint8_t current_manual_count = SetManual();
// 检查设备状态是否改变,如果改变则强制刷新显示
uint8_t need_refresh = 0;
if(driveData.LED_Flag != last_LED_Flag || driveData.BEEP_Flag != last_BEEP_Flag)
{
need_refresh = 1;
last_LED_Flag = driveData.LED_Flag;
last_BEEP_Flag = driveData.BEEP_Flag;
}
// 确保页面已初始化或光标位置改变或设备状态改变或强制刷新时重新绘制
if(!manual_page_initialized || current_manual_count != last_manual_count || need_refresh || force_refresh)
{
OLED_manualPage1(); // 固定文字
OLED_manualOption(current_manual_count); // 光标
ManualSettingsDisplay1(); // 状态
manual_page_initialized = 1;
last_manual_count = current_manual_count;
force_refresh = 0; // 清除强制刷新标志
OLED_Refresh(); // 强制刷新显示
}
// 立即处理手动模式按键
if(current_key_num != 0)
{
ManualControl(current_manual_count);
OLED_manualPage1(); // 重新绘制固定文字
OLED_manualOption(current_manual_count); // 光标
ManualSettingsDisplay1(); // 状态
OLED_Refresh(); // 按键操作后立即刷新
KeyNum = 0; // 立即清除按键标志
}
// 确保显示内容始终正确
OLED_manualPage1(); // 固定文字
OLED_manualOption(current_manual_count); // 光标
ManualSettingsDisplay1(); // 状态
Control_Manager();
break;
}
case SETTINGS_MODE:
{
// 优化设置模式响应速度
static uint8_t is_threshold_page_inited = 0;
uint8_t curr_count_s = SetSelection();
// 立即处理设置模式内的按键
if(current_key_num != 0)
{
if (is_secondary_menu == 1)
{
// 二级菜单按键立即处理
if (current_key_num == KEY_2 || current_key_num == KEY_3 || current_key_num == KEY_4)
{
// 这里根据你的二级菜单逻辑处理
// 处理完后立即刷新
OLED_Refresh();
KeyNum = 0;
}
else if (current_key_num == KEY_1)
{
is_secondary_menu = 0;
secondary_pos = 1;
OLED_Clear();
OLED_settingsPage1();
SettingsThresholdDisplay1();
OLED_settingsOption(curr_count_s);
OLED_Refresh();
KeyNum = 0;
}
}
else
{
// 一级菜单按键立即处理
if (current_key_num == KEY_3 || current_key_num == KEY_4)
{
ThresholdSettings(curr_count_s);
SettingsThresholdDisplay1();
OLED_Refresh();
KeyNum = 0;
}
else if (current_key_num == KEY_1)
{
mode = AUTO_MODE;
is_threshold_page_inited = 0;
FLASH_W(FLASH_START_ADDR, Sensorthreshold.tempValue, Sensorthreshold.hrAvgValue,
Sensorthreshold.luxValue, Sensorthreshold.distanceValue);
KeyNum = 0;
}
}
}
// 正常显示逻辑
if (is_secondary_menu == 1)
{
}
else
{
// 一级菜单显示
if (curr_count_s >= 1 && curr_count_s <= 4)
{
if (is_threshold_page_inited == 0)
{
OLED_settingsPage1();
is_threshold_page_inited = 1;
}
}
OLED_settingsOption(curr_count_s);
SettingsThresholdDisplay1();
}
break;
}
}
// ==================== 限制显示刷新频率 ====================
if(current_time - last_display_time > 25) // 每50ms刷新一次显示 (25 * 2ms = 50ms)
{
// 所有模式都需要刷新显示
OLED_Refresh();
last_display_time = current_time;
}
}
}六、实验效果
七、包含内容
