目录
[(1)Arduino Mega单片机程序](#(1)Arduino Mega单片机程序)
一、串口中断配置
1、USART1配置
代码
void USART1_Init(u32 baudrate)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义TX、RX引脚结构体变量
USART_InitTypeDef USART_InitStructure; //定义串口结构体
NVIC_InitTypeDef NVIC_InitStructure; //设置串口中断优先级
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9; //TX,选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10; //RX,选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //输入空模式
//GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //接收的不需要
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
USART_InitStructure.USART_BaudRate=baudrate; //设置波特率
USART_InitStructure.USART_WordLength=USART_WordLength_8b; //数据位长度,8Bit
USART_InitStructure.USART_StopBits=USART_StopBits_1; //停止位:1
USART_InitStructure.USART_Parity=USART_Parity_No; //奇偶校验位,无
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx | USART_Mode_Tx; //串口工作模式
USART_Init(USART1,&USART_InitStructure); //初始化函数,串口1
USART_Cmd(USART1,ENABLE); //串口使能
USART_ClearFlag(USART1,USART_FLAG_TC); //清除发送完成状态标志
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //设置串口中断类型为接收中断,并使能
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //USART1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}2、USART3配置
(1)串口3引脚配置
void USART3_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure; //定义串口初始化结构体
/* config USART3 clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3 , ENABLE);
/* config GPIO clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE);
/* USART3 GPIO config */
/* Configure USART3 Tx (PB.10) as alternate function push-pull 推拉输出模式*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure USART3 Rx (PB.11) as input floating 浮点输入模式*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_Configurationusart3();
/* USART3 mode config */
//USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_BaudRate = 9600;//波特率9600
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8位数据
USART_InitStructure.USART_StopBits = USART_StopBits_1;//1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No ;//无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//禁用RTSCTS硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //使能发送接收
USART_Init(USART3, &USART_InitStructure);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//使能接收中断
USART_Cmd(USART3, ENABLE);
}(2)串口3中断配置
void NVIC_Configurationusart3(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}二、中断程序处理
1、使用字符控制Led灯
使用串口1中断
void USART1_IRQHandler(void)
{
u8 r;
if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET) //RESET==0。产生接收中断事件
{
//sbuff[len++]=USART_ReceiveData(USART1); //接收发来的字符串
r=USART_ReceiveData(USART1); //接收发来的字符
if(r=='a')
{
led3=0; //led3 点亮
}
else
{
led3=1; //led3关闭
}
USART_SendData(USART1,r); //发送字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET); //发送完成状态标志。SET==1
}
USART_ClearFlag(USART1,USART_FLAG_TC); //清除发送完成状态标志
}2、使用字符串控制Led灯
使用串口1中断
u16 n=0;
u8 i=0;
u8 sp=0;
u8 USART_REC_Finish_FLAG=0;
char SendData[20],Rec_Buffer[20];
char LED3ON[]="led3_on\r"; //串口调试助手发送的时候会加"\r\n",有的串口没有的,需要手动打回车符
char LED3OFF[]="led3_off\r";
void USART1_IRQHandler(void)
{
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
{
if(USART_ReceiveData(USART1)=='\n') //串口调试助手必须加上换行符
{
sp=0;
USART_REC_Finish_FLAG = 1;
for(i=0;i<20;i++) //i 字符串长度
{
Rec_Buffer[i]='\0';
}
}
else
{
if(sp==0)
{
for(i=0;i<20;i++)
{
SendData[i]='\0';
}
}
Rec_Buffer[sp] = USART_ReceiveData(USART1);
SendData[sp]= Rec_Buffer[sp];
sp=sp+1;
n=sp;
}
}
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除接收中断标志
}
while(USART_REC_Finish_FLAG == 1) //等待串口接收完成标志位置1
{
printf("当前发送的字符sp个数:%d\r\n",n);
delay_us(1000); //延时1ms
USART_REC_Finish_FLAG = 0; //使用完成后将串口标志位置0
//led3 ON
if(strcmp(SendData, LED3ON)==0) //比较字符串,相等则返回0
{
led3=0;
printf("LED3 ON\r\n");
}
//led3 OFF
if(strcmp(SendData, LED3OFF)==0)
{
led3=1;
printf("LED3 OFF\r\n");
}
printf("SendData:%s \r\n",SendData);
}
}3、使用字符串位控制Led灯
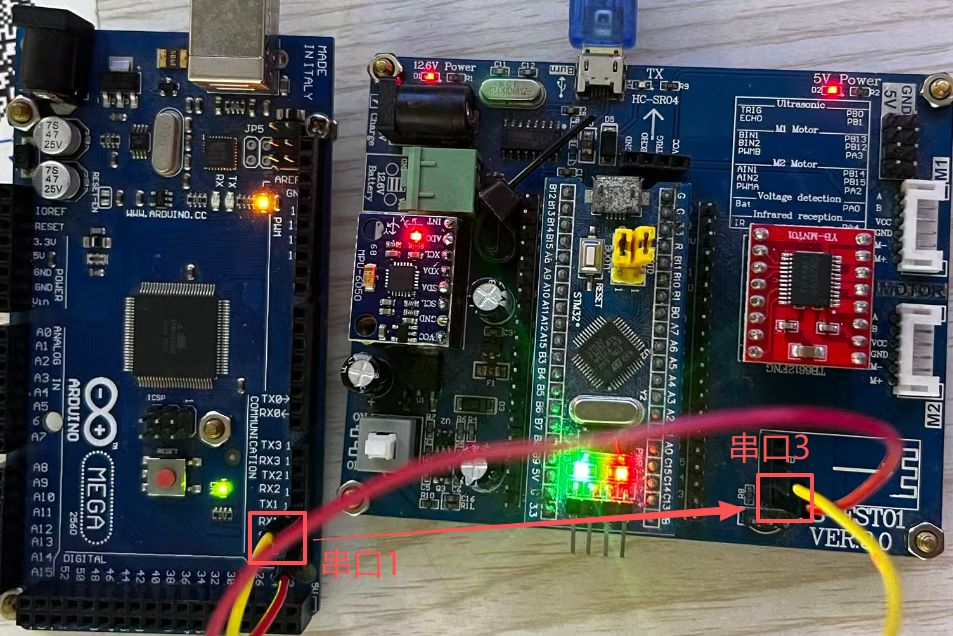
串口1中断:串口1连接串口调试助手
串口3中断:串口3和Arduino Mega单片机串口1连接,使用串口调试助手和Arduino Mega单片机连接,Arduino Mega单片机将串口调试助手发送的字符串通过串口1再转发送给STM32串口3
(1)Arduino Mega单片机程序
String inputString = ""; //保存串口接收的字符串
bool stringComplete = false; //串口接收完成标志位
void setup()
{
Serial.begin(9600);
Serial1.begin(9600);
Serial2.begin(9600);
inputString.reserve(200);
}
void loop()
{
if (stringComplete)
{
//Serial.print(inputString); //串口0发送出去
Serial1.print(inputString); //串口1发送出去
Serial2.print(inputString); //串口2发送出去
//清空接收字符串
inputString = "";
stringComplete = false;
}
}
//串口0中断事件
void serialEvent()
{
while (Serial.available())
{
char inChar = (char)Serial.read();
inputString += inChar;
if (inChar == '#') //结束符
{
stringComplete = true;
}
}
}
//串口1中断事件
void serialEvent1()
{
while (Serial1.available())
{
char inChar = (char)Serial1.read();
inputString += inChar;
if (inChar == '#') //结束符
{
stringComplete = true;
}
}
}(2)串口1中断位处理程序
void USART1_IRQHandler(void)
{
u8 uartvalue = 0;
if(USART_GetFlagStatus(USART1, USART_FLAG_ORE) != RESET) //注意!不能使用if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)来判断
{
USART_ClearFlag(USART1, USART_FLAG_ORE); //读SR其实就是清除标志
USART_ReceiveData(USART1);
}
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)!=RESET)
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
uartvalue = USART1->DR;
if(uartvalue == '$')
{
startBit = 1;
num = 0;
}
if(startBit == 1)
{
inputString[num] = uartvalue;
}
if(startBit == 1 && uartvalue == '#')
{
newCmdReceivedFlag = 1;
startBit = 0;
int9num = num;
}
num++;
if(num >= 80)
{
num = 0;
startBit = 0;
newCmdReceivedFlag = 0;
}
}
} (3)串口3中断位处理程序
/***************************************************************
* 函数名 :USART3_IRQHandler
* 蓝牙-串口3,中断函数
*
* 如 前进:$1,0,0,0,0,0,0,0,0,0#
***************************************************************/
int num = 0;
u8 startBit = 0;
int int9num =0;
void USART3_IRQHandler(void)
{
u8 uartvalue = 0;
if(USART_GetFlagStatus(USART3, USART_FLAG_ORE) != RESET) //注意!不能使用if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)来判断
{
USART_ClearFlag(USART3, USART_FLAG_ORE); //读SR其实就是清除标志
USART_ReceiveData(USART3);
}
if(USART_GetFlagStatus(USART3,USART_FLAG_RXNE)!=RESET)
{
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
uartvalue = USART3->DR;
if(uartvalue == '$')
{
startBit = 1;
num = 0;
}
if(startBit == 1)
{
inputString[num] = uartvalue;
}
if(startBit == 1 && uartvalue == '#')
{
newCmdReceivedFlag = 1;
startBit = 0;
int9num = num;
}
num++;
if(num >= 80)
{
num = 0;
startBit = 0;
newCmdReceivedFlag = 0;
}
}
}
u8 newCmdReceivedFlag = 0;
u8 inputString[80] = {0};
u8 ProtocolString[80] = {0};
//测试-控制LED-$1,0,0,0,0,0,0,0,0,0#
if(ProtocolString[1]=='1')
{
led13=0; //低电平LED灯亮
}
if(ProtocolString[1]=='0')
{
led13=1; //高电平LED灯灭
}三、测试
1、起始符和结束符说明
'$'的起始符,'#'是结束符。起始符和结束符对不上,则字符串发送控制指令无效。
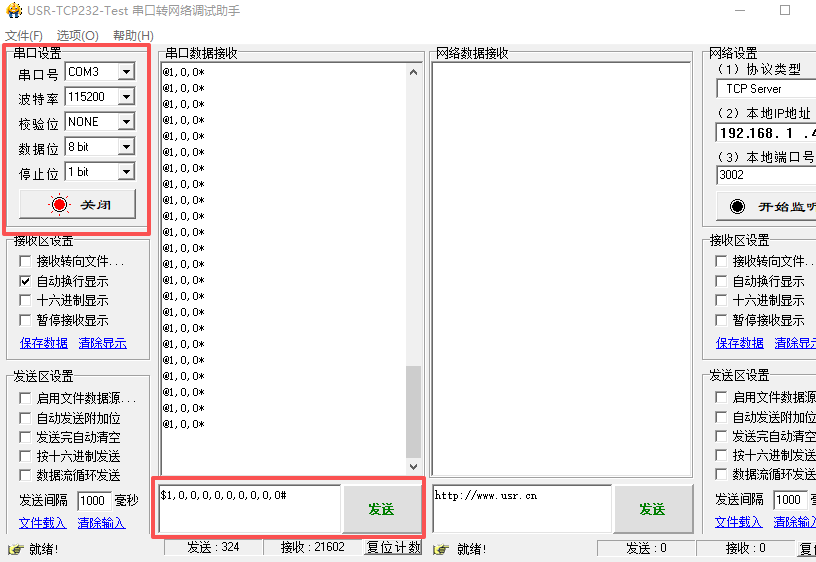
2、串口1中断测试
LED亮:"$1,0,0,0,0,0,0,0,0,0#"
LED灭:"$0,0,0,0,0,0,0,0,0,0#"
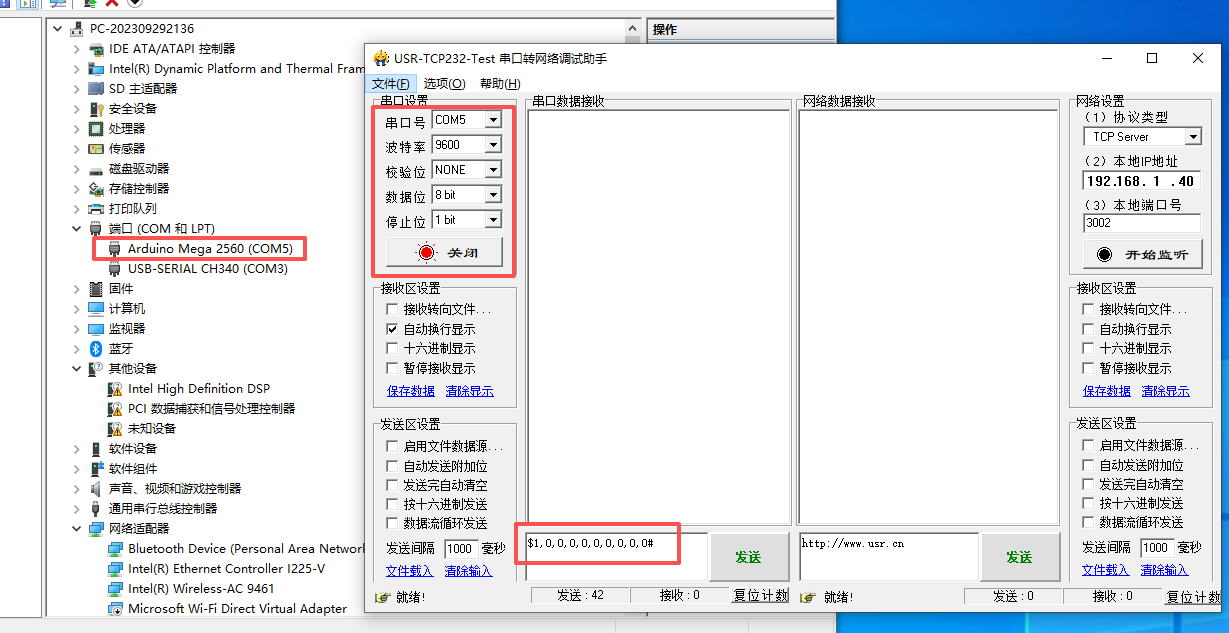
3、串口3中断测试
串口调试助手连接Arduino Mega单片机
LED亮:"$1,0,0,0,0,0,0,0,0,0#"
LED灭:"$0,0,0,0,0,0,0,0,0,0#"
四、程序打包下载链接
https://download.csdn.net/download/panjinliang066333/92469974