https://github.com/spy-ban/Reinforcement-Learning/tree/main/TRPO
-
sb3-contrib 调库快速搭建 TRPO 实验;
-
从零实现 TRPO 的关键细节(KL 约束、共轭梯度、线搜索、GAE 等),
帮助深入理解算法本身的数学原理与工程实现。
本文深入解析了TRPO(Trust Region Policy Optimization)算法的核心实现,
并展示其在经典控制任务 CartPole-v1 和 Atari 游戏 Breakout-v5上的应用。
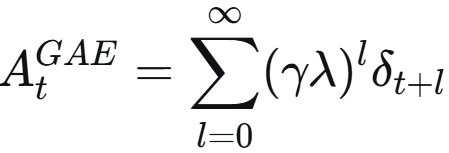
首先详细推导广义优势估计(GAE),阐释了其通过λ值平衡偏差与方差的原理。
随后重点拆解了 TRPO策略网络更新的关键步骤,包括构建代理目标函数、
计算Fisher信息矩阵 与 共轭梯度求解优化方向 ,以及使用回溯线搜索确定最优步长。
实验部分使用 stable-baselines3 库和手写TRPO代码进行验证:
在CartPole-v1上,手写实现仅用6000步即可稳定获得高分;
在Breakout-v5上,通过 CNN策略 与 多环境并行实现了高效训练。
文章为理解和复现TRPO这一经典信赖域算法提供了完整的理论梳理与代码实践参考。
目录
[1. GAE(Generalized Advantage Estimation)优势函数](#1. GAE(Generalized Advantage Estimation)优势函数)
[2. TRPO agent 网络更新](#2. TRPO agent 网络更新)
[2.1 策略网络参数更新](#2.1 策略网络参数更新)
[2.2 共轭梯度法求解优化方向:KL 散度关于策略参数的梯度](#2.2 共轭梯度法求解优化方向:KL 散度关于策略参数的梯度)
[2.3 优化步长:理论最长再不断减半验证](#2.3 优化步长:理论最长再不断减半验证)
[3. 实验](#3. 实验)
[3.1 用 sb3 的 TRPO 跑倒立摆](#3.1 用 sb3 的 TRPO 跑倒立摆)
[3.2 用 sb3 的 TRPO 跑 Breakout](#3.2 用 sb3 的 TRPO 跑 Breakout)
[3.3 手搓TRPO](#3.3 手搓TRPO)
1. GAE(Generalized Advantage Estimation)优势函数
- 蒙特卡洛 :使用整个回合 的真实回报来估计。无偏,但高方差(因为后续所有随机动作和状态转移的噪声都包含在内)。
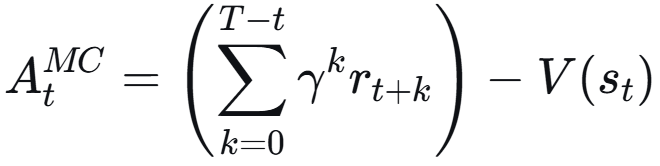
- 时序差分 :使用一步奖励 和下一个状态的估计值 r + γV(s') - V(s)。低方差,但有偏(因为可能V(s')不准)。

λ = 0,只看一步 则为 TD;λ = 1,看完整轨迹 蒙特卡洛;调 λ 平衡偏差与方差。

倒序循环累积
python
def gae(
self,
value_net: torch.nn.Module,
states: torch.Tensor,
rewards: torch.Tensor,
next_states: torch.Tensor,
not_dones: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""输出每个时间步的折扣回报和优势函数值"""
values = value_net(states)
n = len(rewards)
# 预分配输出张量
Rs = torch.empty_like(rewards)
advantages = torch.empty_like(rewards)
# 初始化累计值
next_val = value_net(next_states[-1])
ret, adv = next_val, 0.0 # 上一个累积的 价值/优势函数
for i in reversed(range(n)):
not_done = not_dones[i]
# 计算回报
ret = rewards[i] + self.gamma * ret * not_done
Rs[i] = ret
# 计算优势函数
td_error = rewards[i] + self.gamma * next_val * not_done - values[i]
adv = td_error + self.gamma * self.lambda_ * adv * not_done
advantages[i] = adv
# 更新下一状态价值
next_val = values[i]
return Rs, advantages2. TRPO agent 网络更新
总体:数据收集阶段 + 优势估计阶段 + 网络更新
算 Rs, gae 和两个网络更新。
python
def update(self) -> Dict: # 算 GAE 更新两个网络
self.stats = dict()
if self.trans_buffer.size >= self.cfg.agent.rollout_steps: # buffer满了则更新
states, actions, next_states, rewards, dones = self.trans_buffer.buffers
# get advantage
with th.no_grad(): # 不计算梯度
Rs, self.adv = self.gae(self.value_net, states, rewards, next_states, dones)
self._update_actor(states, actions) # 更新策略网络
self._update_value_net(states, Rs) # 更新价值网络
self.trans_buffer.clear() # buffer更新完清空
return self.stats更新价值网络:与折扣回报的均方误差
python
def _update_value_net(self, states: th.Tensor, Rs: th.Tensor):
idx = list(range(self.trans_buffer.size))
for _ in range(self.cfg.agent.value_net.n_update):
random.shuffle(idx)
batches = list(BatchSampler(idx, batch_size=self.batch_size, drop_last=False))
# 采样batch进行更新
for batch in batches:
sampled_states = states[batch]
values = self.value_net(sampled_states)
loss = F.mse_loss(values, Rs[batch]) # 价值网络与折扣回报的均方误差
self.stats.update({"loss/critic": gradient_descent(self.value_net_optim, loss)})2.1 策略网络参数更新
优化问题:确定优化方向 H^{-1}g 和 优化步长。
先准备损失函数的导数 和 kl 散度的导数。
重要性采样代理目标函数:

对数差的指数 -> 除法;加权优势函数期望 -> 均值
python
def _get_surrogate_loss(
self, log_probs: th.Tensor, old_log_probs: th.Tensor
) -> th.Tensor:
return th.mean(th.exp(log_probs - old_log_probs) * self.adv)连续型 -> 高斯actor网络 mean, std = self.actor(states)
输入为状态 batch_size, state_dim -> 输出 动作的均值&标准差 batch_size, action_dim
如何求 π(a|s):
输出:dist 每个动作的均值,方差 ;状态 s 下做这些动作 a 的对数概率(对数之和)
python
def _select_action_dist(
self, states: th.Tensor, actions: th.Tensor
) -> Tuple[Normal, th.Tensor]: # 正态分布
action_mean, action_std = self.actor(states)
action_dist = Normal(action_mean, action_std)
log_prob = th.sum(action_dist.log_prob(actions), dim=-1, keepdim=True) # 对数求和
return action_dist, log_prob正式策略网络参数更新:
准备损失函数的导数 和 kl 散度的导数 ,(锁定备份旧策略)
两个 graph -> True 便于后续求二阶导
python
def _update_actor(self, states: th.Tensor, actions: th.Tensor):
original_actor_param = th.clone(parameters_to_vector(self.actor.parameters()).data) # 备份
# 旧策略备份
action_dist, log_probs = self._select_action_dist(states, actions)
old_action_dist = Normal(action_dist.loc.data.clone(), action_dist.scale.data.clone())
old_log_probs = log_probs.data.clone() # 旧策略old保存下来
# 但后面求解时候 log_probs 会一直变
# 定义损失函数的导数
loss = self._get_surrogate_loss(log_probs, old_log_probs)
pg = grad(loss, self.actor.parameters(), retain_graph=True)
pg = parameters_to_vector(pg).detach()
# 定义kl散度的导数
kl = th.mean(kl_divergence(old_action_dist, action_dist))
kl_g = grad(kl, self.actor.parameters(), create_graph=True)
kl_g = parameters_to_vector(kl_g)梯度方向 -> 最大 步长 -> 找最优 步长 -> 真的更新
理论最大步长 step_size = sqrt(2δ/(x^T H x))
python
update_dir = self._conjugate_gradient(kl_g, pg) # 共轭梯度求解梯度方向
Fvp = self._Fvp_func(kl_g, pg) # Hx
full_step_size = th.sqrt(2 * self.delta / th.dot(update_dir, Fvp)) # 最大步长
alpha = self._line_search(check_constrain) # 最优步长
vector_to_parameters(
original_actor_param + alpha * full_step_size * update_dir,
self.actor.parameters(),
) # 参数更新2.2 共轭梯度法求解 优化方向:KL 散度关于策略参数的梯度
-
自然梯度方向
H^{-1}g,其中 H为 KL 散度的二阶 Fisher 信息矩阵,g为目标函数梯度 -
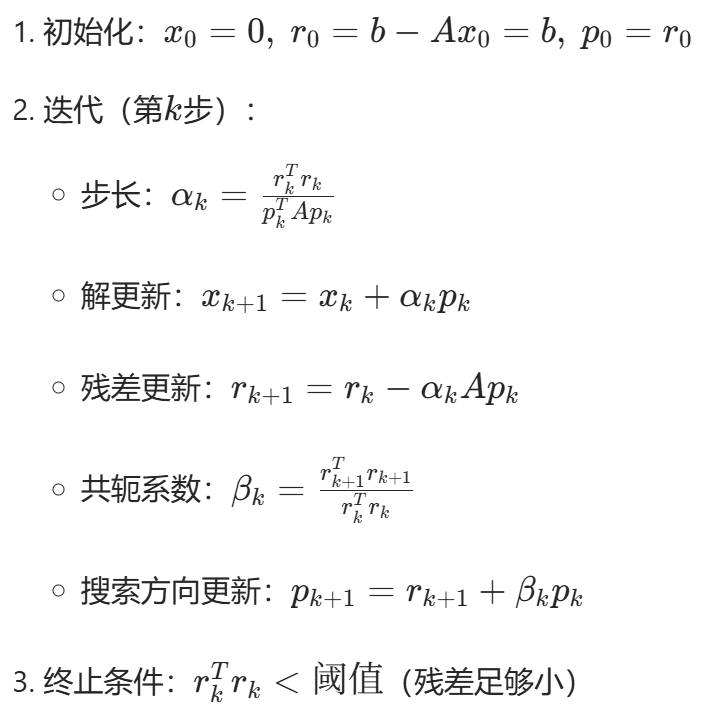
直接求逆计算量太大(O(n³))使用共轭梯度法近似求解
-
只需计算矩阵-向量乘积
Hv,不需要显式构造H -
迭代求解,直到残差足够小或达到最大步数
-
python
def _conjugate_gradient(self, kl_g: th.Tensor, pg: th.Tensor) -> th.Tensor:
# 初始化:x为0向量,r和p初始化为梯度g
x = th.zeros_like(pg) # 解向量,初始为0
r = pg.clone() # 残差 r = b - Ax,初始为g(因为x=0时r=g)
p = pg.clone() # 搜索方向,初始为梯度方向
rdotr = th.dot(r, r) # r·r,用于计算收敛条件
for _ in range(self.cg_steps):
# Fisher 向量积 Hp
_Fvp = self._Fvp_func(kl_g, p)
# 计算步长 α = (r·r) / (p·Hp)
alpha = rdotr / th.dot(p, _Fvp)
# 更新解:x = x + αp
x += alpha * p
# 更新残差:r = r - αHp
r -= alpha * _Fvp
# 计算新的残差内积
new_rdotr = th.dot(r, r)
# 计算共轭系数 β = (r_new·r_new) / (r_old·r_old)
beta = new_rdotr / rdotr
# 更新搜索方向:p = r + βp
p = r + beta * p
# 更新残差内积
rdotr = new_rdotr
# 如果残差足够小,提前终止
if rdotr < self.residual_tol:
break
return x # 返回近似解 x ≈ H⁻¹gps:计算Fisher-向量乘积 Hp
-
通过自动微分计算
Hp(二阶信息)、添加阻尼项提高数值稳定性 -
从 g 求导为 H,再乘以 p;变成对 (gp)求导
-
因为 g 是 d*1 向量;而 H 是 d*d 的,绕过存储 d*d 的 H
python
def _Fvp_func(self, kl_g: th.Tensor, p: th.Tensor) -> th.Tensor:
# 1. 计算内积 g·p
gvp = th.dot(kl_g, p)
# 2. 对gvp求关于策略参数的梯度,得到Hp
# 这是关键技巧:Hp = ∇(g·p)
Hvp = grad(gvp, self.actor.parameters(), retain_graph=True)
# 3. 将梯度列表展平为向量
Hvp = parameters_to_vector(Hvp).detach()
# 4. 添加阻尼项稳定数值计算
# Hvp = Hp + λp,防止矩阵奇异
Hvp += self.damping * p
return Hvp2.3 优化步长:理论最长再不断减半验证
回溯线搜索:从最大步长开始,按比例衰减
python
def _line_search(self, check_constrain: Callable) -> float: # 回溯线搜索
alpha = 1.0 / self.beta
for _ in range(self.max_backtrack):
# 按比例衰减尝试
alpha *= self.beta
if check_constrain(alpha):
return alpha
return 0.0check 验证这个步长可不可以
python
def check_constrain(alpha):
step = alpha * full_step_size * update_dir
with th.no_grad():
vector_to_parameters(
original_actor_param + step, self.actor.parameters()
) # 代入步长,得到假设参数更新后的新策略
try: # 新策略的动作分布 + 概率(try 防止报错)
new_action_dist, new_log_probs = self._select_action_dist(
states, actions
)
except:
vector_to_parameters( # 报错啦!用备份的参数
original_actor_param, self.actor.parameters()
)
return False
new_loss = self._get_surrogate_loss(new_log_probs, old_log_probs) # 新损失
new_kl = th.mean(kl_divergence(old_action_dist, new_action_dist)) # 新 KL
actual_improve = new_loss - loss
if actual_improve.item() > 0.0 and new_kl.item() <= self.delta:
# 损失提升 且 KL≤阈值 -> 可以
self.stats.update({"loss/actor": new_loss.item()})
return True
else:
return False # 不行 继续改进3. 实验
3.1 用 sb3 的 TRPO 跑倒立摆
python
import gymnasium as gym
from sb3_contrib import TRPO
from stable_baselines3.common.evaluation import evaluate_policy
env = gym.make("CartPole-v1", render_mode="rgb_array")
model = TRPO(
policy="MlpPolicy",
env=env,
learning_rate=3e-4,
gamma=0.99,
gae_lambda=0.95,
verbose=1,
n_steps=2048,
)
model.learn(total_timesteps=10000) # 训练步数
model.save("trpo_cartpole_sb3")
model.env.close()
# 评估(无渲染)
eval_env = gym.make("CartPole-v1")
mean_reward, std_reward = evaluate_policy(model, eval_env, n_eval_episodes=10, deterministic=True)
print(f"Eval reward: {mean_reward:.1f} ± {std_reward:.1f}")
eval_env.close()
# 可视化测试
test_env = gym.make("CartPole-v1", render_mode="human")
loaded_model = TRPO.load("trpo_cartpole_sb3", env=test_env)
for ep in range(5):
obs, _ = test_env.reset()
ep_rew, done = 0.0, False
while not done:
action, _ = loaded_model.predict(obs, deterministic=True)
obs, reward, terminated, truncated, _ = test_env.step(action)
ep_rew += reward
done = terminated or truncated
print(f"测试轮 {ep+1} 总奖励: {ep_rew:.1f}")
test_env.close()3.2 用 sb3 的 TRPO 跑 Breakout
ALE/Breakout-v5 弹小球打砖块,启动玩法 (需要先注册环境)
python
import gymnasium as gym
import ale_py
# 注册ALE的环境(必须步骤)
gym.register_envs(ale_py)
env = gym.make('ALE/Breakout-v5', render_mode='human')
obs, info = env.reset()
for _ in range(100):
action = env.action_space.sample()
obs, reward, terminated, truncated, info = env.step(action)
if terminated or truncated:
obs, info = env.reset()
env.close()使用 Atari 经典预处理来优化 Breakout 训练效果:
- 图像预处理:灰度 + 缩放到 84x84(由 make_atari_env 内部包装)
- 帧堆叠:连续 4 帧作为输入(VecFrameStack)
- 奖励裁剪:clip_reward=True(内部包装)
- 多环境并行:n_envs > 1,加快采样,稳定梯度
python
import gymnasium as gym
import ale_py
from sb3_contrib import TRPO
from stable_baselines3.common.env_util import make_atari_env
from stable_baselines3.common.vec_env import VecFrameStack
# 注册 ALE 的环境(必须步骤)
gym.register_envs(ale_py)
n_envs = 4
env = make_atari_env(
"ALE/Breakout-v5",
n_envs=n_envs,
seed=0,
monitor_dir="./breakout_logs", # 使用 Monitor 记录训练过程
env_kwargs={"render_mode": "rgb_array"}, # 训练时不直接渲染窗口
)
env = VecFrameStack(env, n_stack=4)TRPO 模型:Atari 为图像输入,需要使用 CNN 策略,训练100w步
python
model = TRPO(
policy="CnnPolicy", # 使用 CNN 策略处理图像输入
env=env,
learning_rate=1e-4, # 稍小的学习率,训练更稳定
gamma=0.99,
verbose=1,
target_kl=0.01, # KL 散度约束目标值
gae_lambda=0.95, # 广义优势估计系数
policy_kwargs=dict(normalize_images=False),
n_steps=1024,
batch_size=128,
device="cuda",
tensorboard_log="./trpo_breakout_tensorboard",
)
model.learn(total_timesteps=1000_000)
model.save("trpo_breakout_sb3")测试
python
# 创建测试环境(与训练相同的预处理,但只用 1 个环境)
env_test = make_atari_env(
"ALE/Breakout-v5",
n_envs=1,
seed=0,
monitor_dir="./breakout_eval_logs",
env_kwargs={"render_mode": "rgb_array"},
)
env_test = VecFrameStack(env_test, n_stack=4)
# 加载模型进行测试
loaded_model = TRPO.load("trpo_breakout_sb3", env=env_test)
# 测试模型(在 VecEnv 上评估)
for test_ep in range(20):
obs = env_test.reset()
test_reward = 0.0
done = False
steps = 0
# 对于 VecEnv,done 是批量的布尔数组
while (not done) and steps < 5000: # 限制最大步数,避免无限循环
# 确定性预测(关闭噪声,使动作更稳定)
action, _states = loaded_model.predict(obs, deterministic=True)
obs, rewards, dones, infos = env_test.step(action)
# 单环境,索引 0 即可
test_reward += float(rewards[0])
done = bool(dones[0])
steps += 1
print(f"测试轮 {test_ep + 1} - 总奖励:{test_reward:.1f}, 步数:{steps}")
env.close()
env_test.close()PowerShell 中启动 tensorboard
python
# tensorboard --logdir trpo_breakout_tensorboard --port 6006
# http://localhost:6006/ 网页看tensorboard可视化 平均游戏长度 / 平均得分,上升趋势(还需要更多步数):
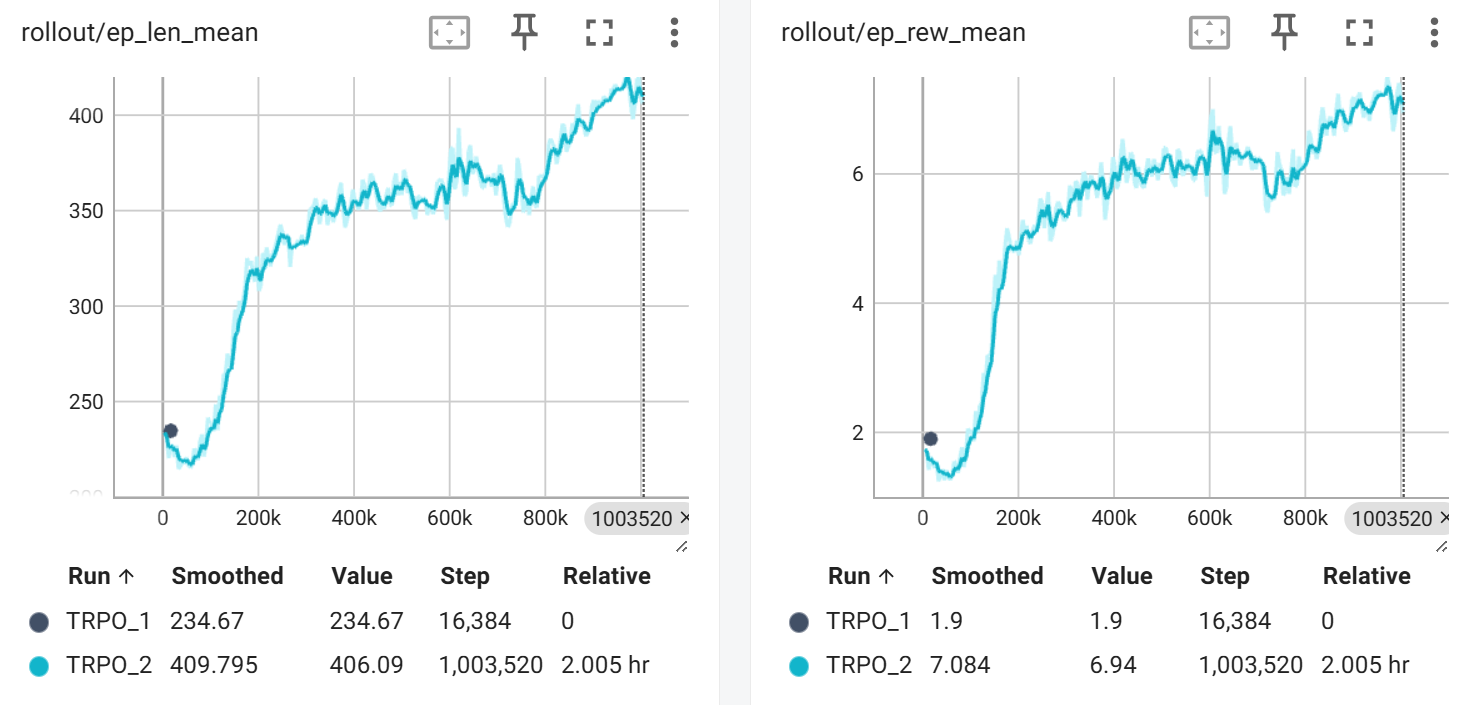
3.3 手搓TRPO
https://github.com/spy-ban/Reinforcement-Learning/tree/main/TRPO/TRPO-CartPole-v1
TRPO-CartPole-v1/
agent.py:TRPO 算法核心逻辑(策略更新、Fisher 向量积、共轭梯度、线搜索等)networks.py:自定义 Actor-Critic 网络结构(全连接 MLP)buffer.py:采样数据缓冲区,实现交互数据的存储与张量化hyperparams.py:TRPO_Config,集中管理超参数与设备选择train.py:训练与测试流程(包含 GAE、early stopping、周期评估等逻辑)main.py:入口脚本,一键训练并测试 TRPO 在CartPole-v1上的表现trpo_cartpole_custom.pth:手写 TRPO 训练得到的模型权重
训练6000 timesteps 后即达到 475+ 均分(满分500)。