目录
[二、陀螺仪数据 获取](#二、陀螺仪数据 获取)
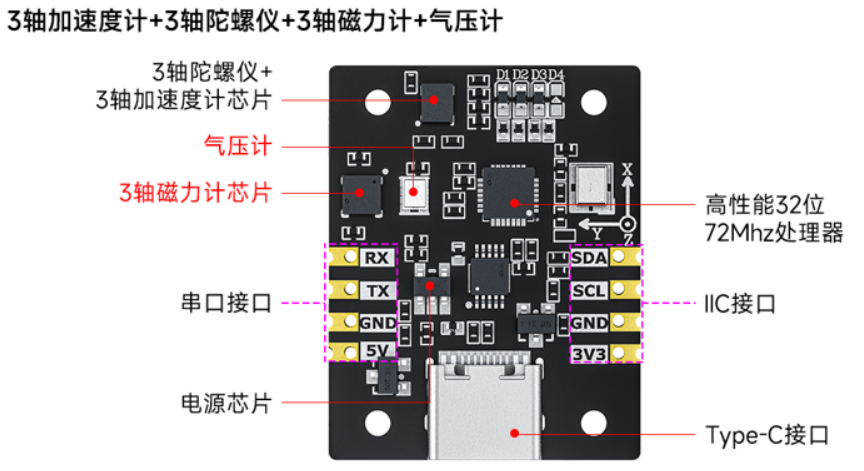
一、模块介绍
1、硬件说明

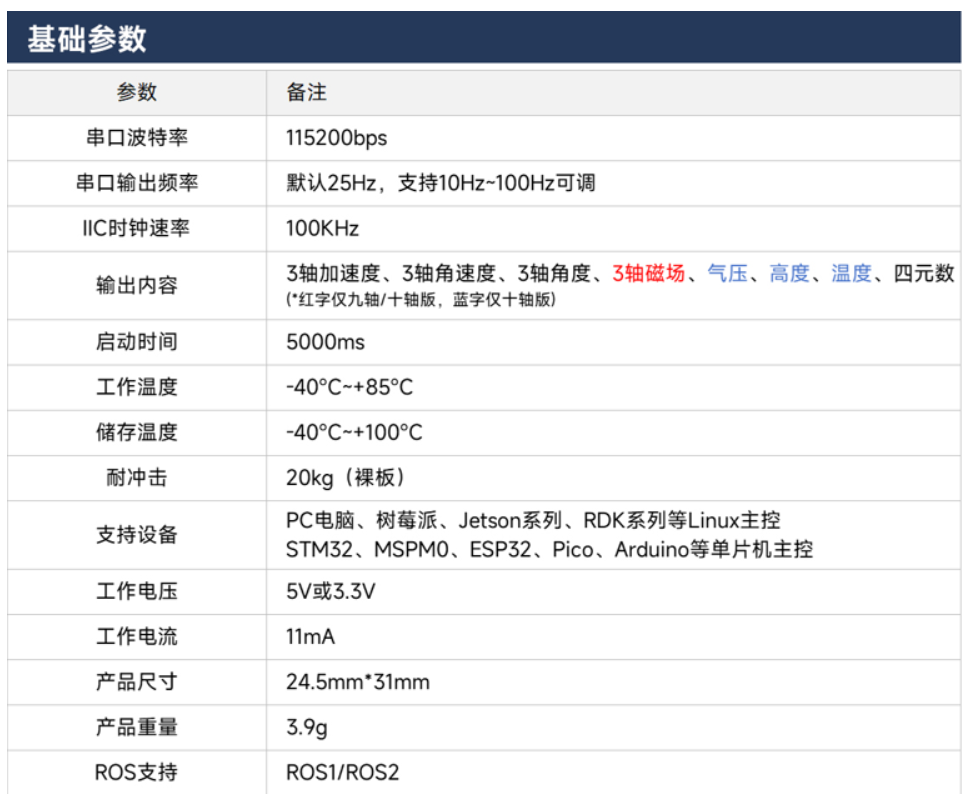
2、参数功能



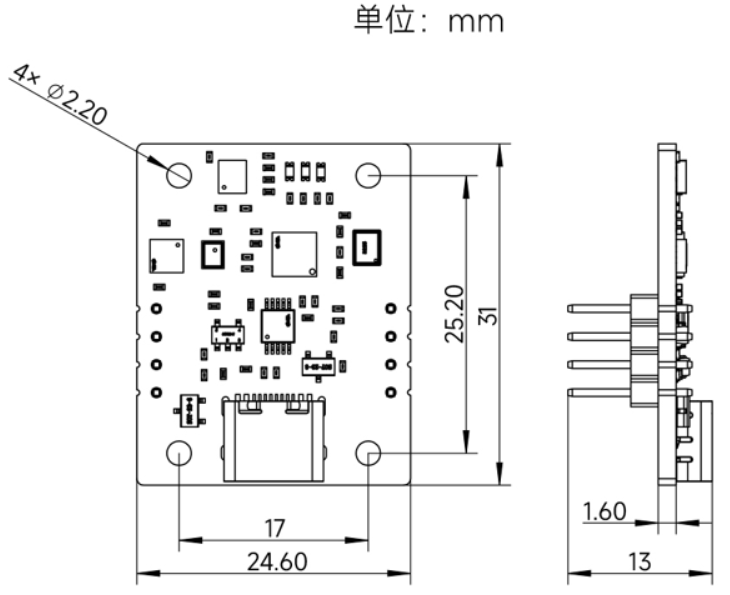
3、尺寸参数
二、陀螺仪数据 获取
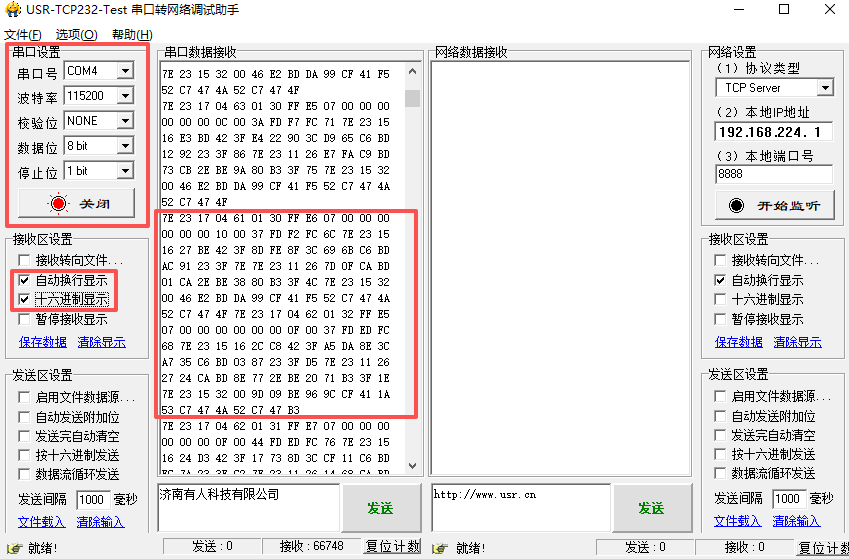
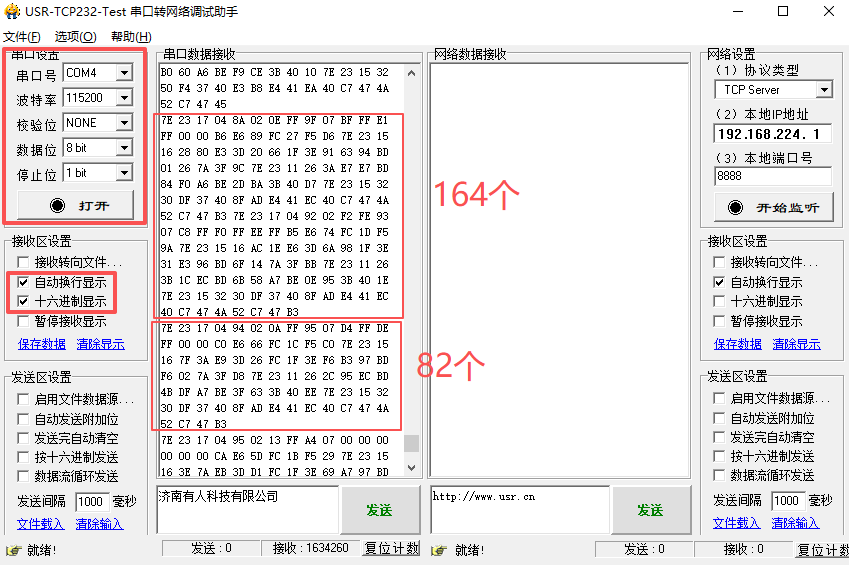
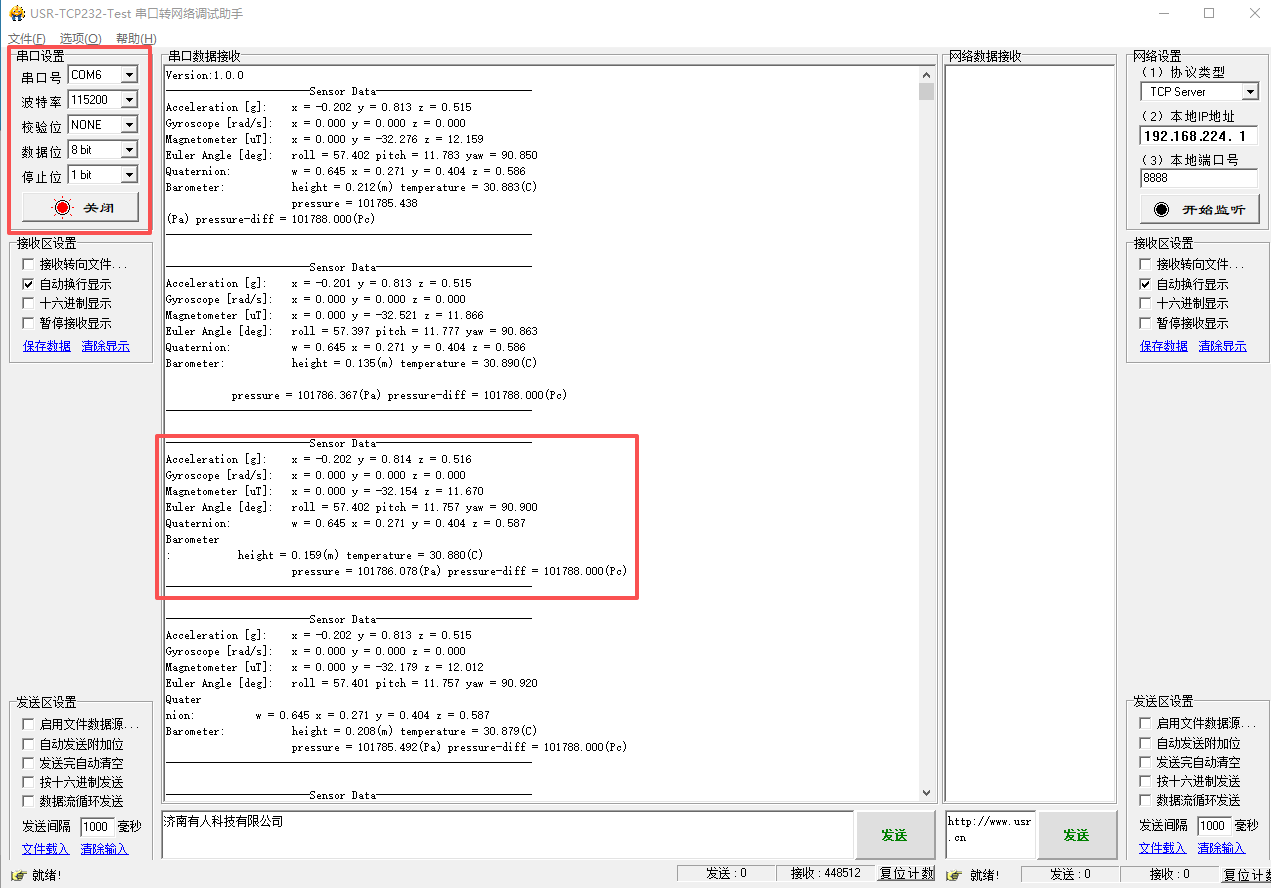
1、PC通信
(1)连接

(2)串口读取
(3)协议介绍
各个指令详细说明,见下载连接
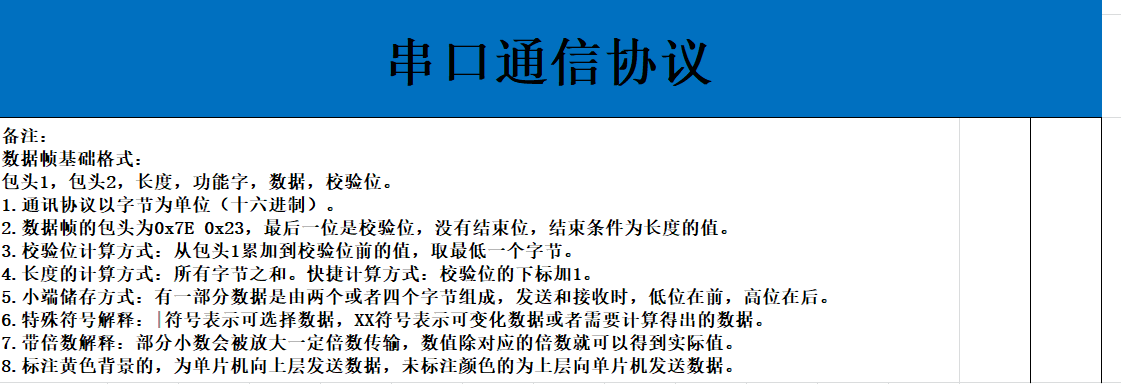
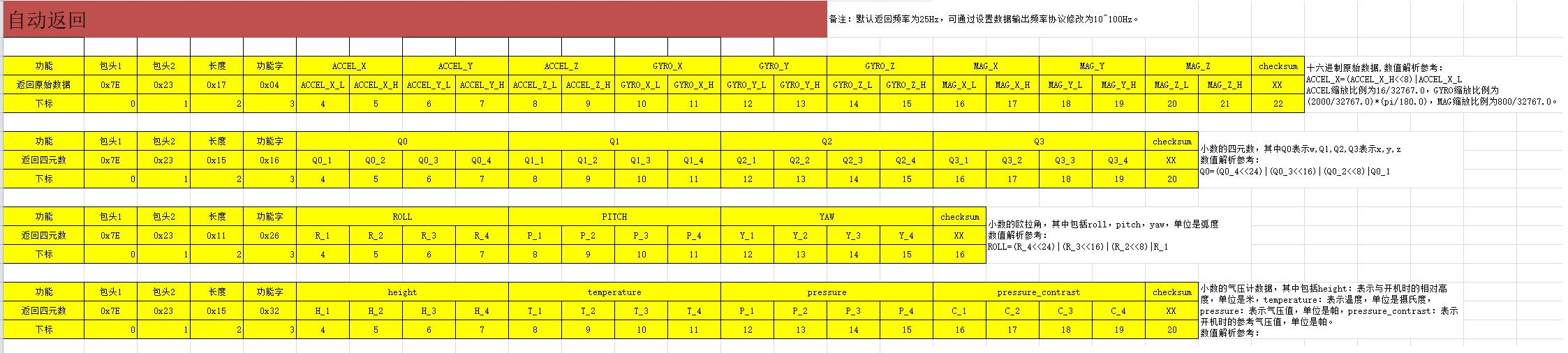
自动返回解析
共82byte数据
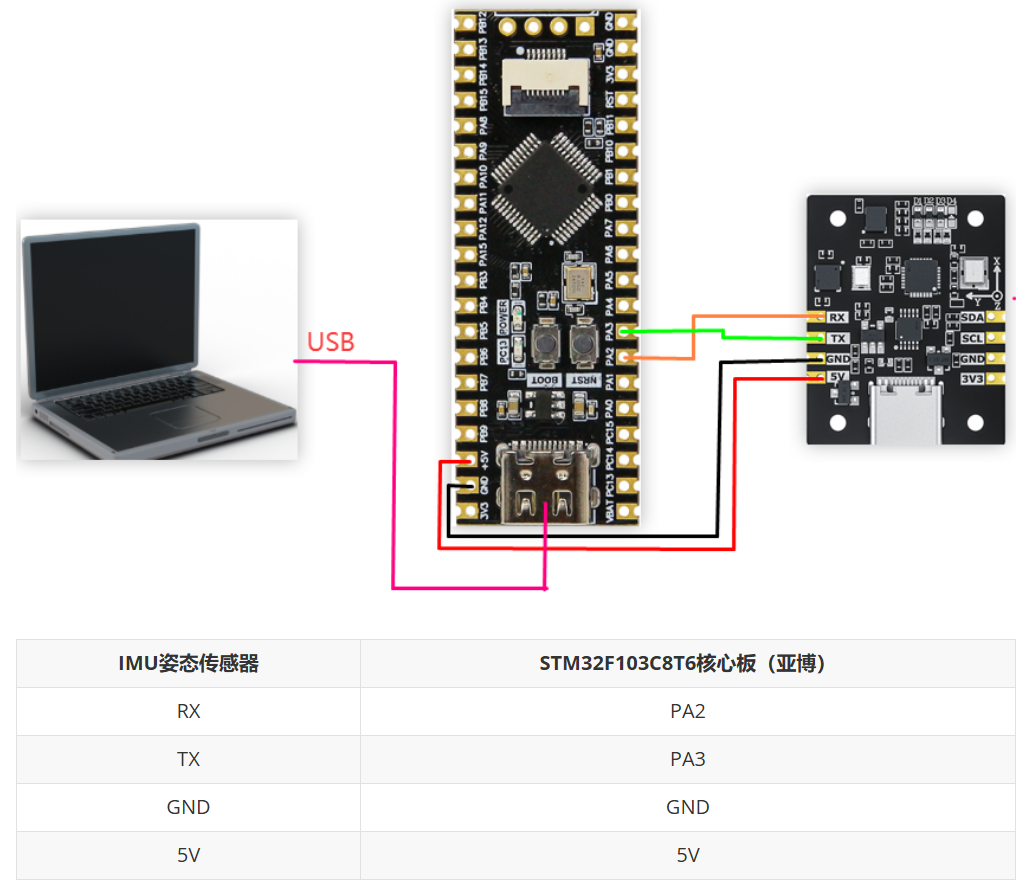
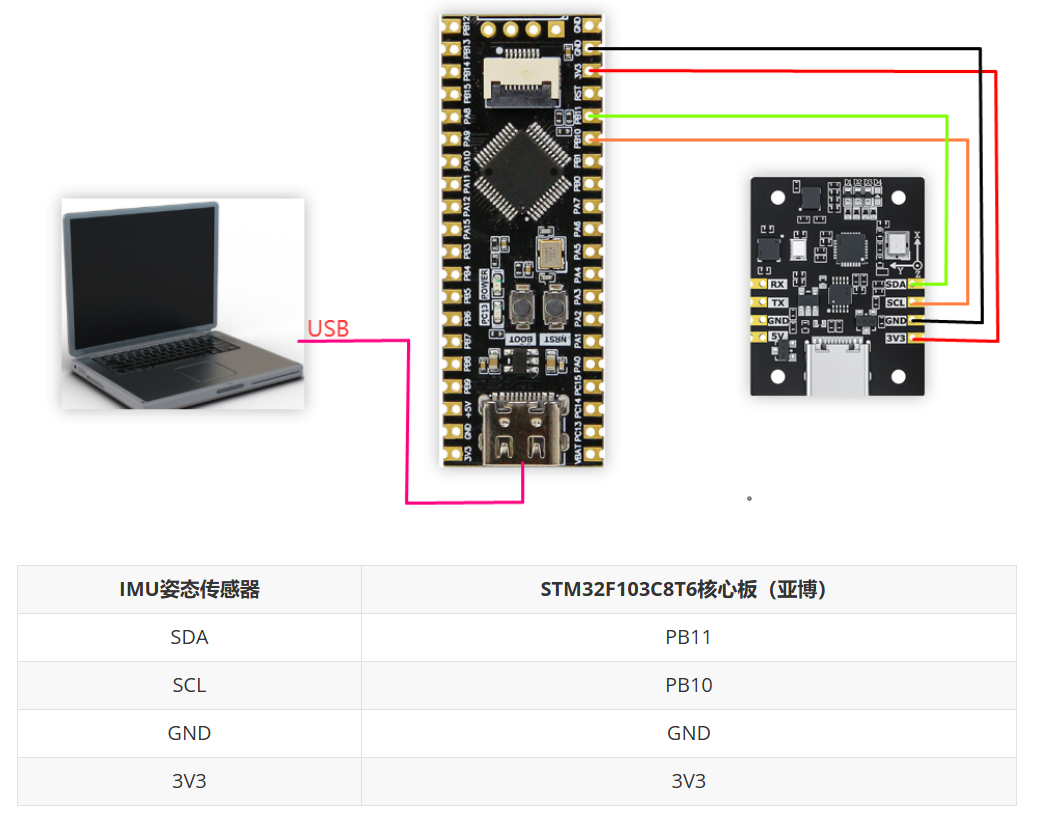
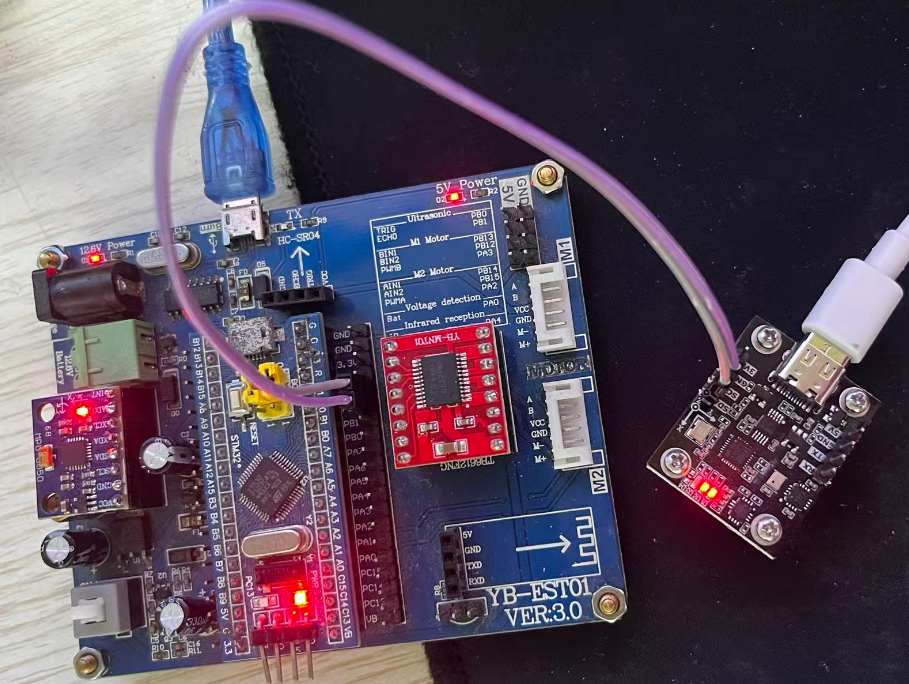
2、STM32串口读取数据
STM32F103C8T6核心板
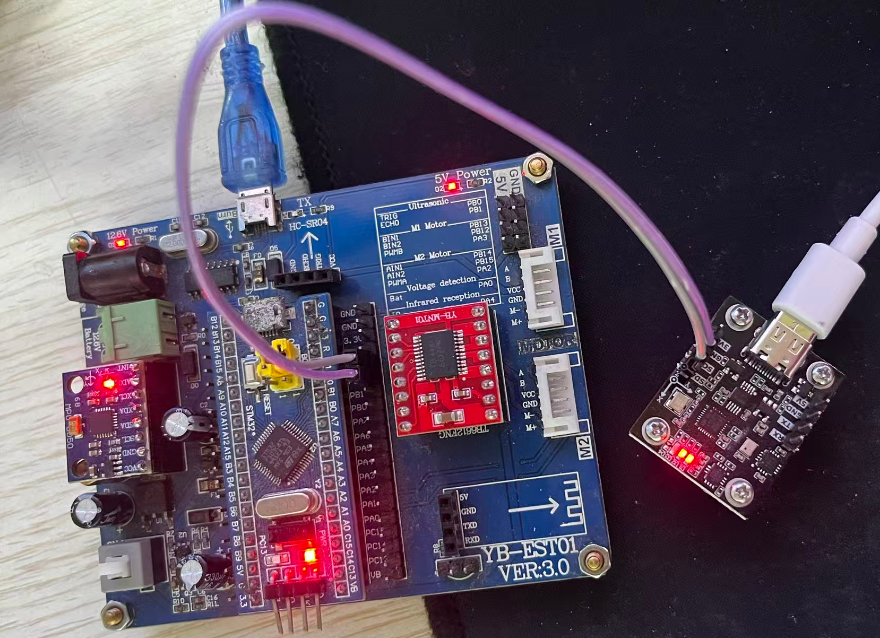
(1)接线说明
(2)关键代码说明
函数说明:
IMU_UART_Process(): 读取缓存的数据,并调用_parse_frame_data解析符合通信协议的数据。
_parse_frame_data():解析数据。
关键代码:
//Process RX ring buffer, parse frames and update internal cache
void IMU_UART_Process(void)
{
enum {
RX_STATE_EXPECT_HEAD1 = 0,
RX_STATE_EXPECT_HEAD2,
RX_STATE_EXPECT_LENGTH,
RX_STATE_EXPECT_FUNCTION,
RX_STATE_COLLECT_DATA
};
static uint8_t rx_state = RX_STATE_EXPECT_HEAD1;
static uint8_t frame_length = 0;
static uint8_t frame_function = 0;
static uint8_t frame_buffer[64]; /* 数据区 + 校验 / data section + checksum */
static uint16_t frame_index = 0;
uint8_t current_byte = 0;
while (_rxbuf_pop(¤t_byte) == 0) {
switch (rx_state) {
case RX_STATE_EXPECT_HEAD1:
rx_state = (current_byte == FRAME_HEAD1) ? RX_STATE_EXPECT_HEAD2 : RX_STATE_EXPECT_HEAD1;
break;
case RX_STATE_EXPECT_HEAD2:
rx_state = (current_byte == FRAME_HEAD2) ? RX_STATE_EXPECT_LENGTH : RX_STATE_EXPECT_HEAD1;
break;
case RX_STATE_EXPECT_LENGTH:
frame_length = current_byte;
rx_state = RX_STATE_EXPECT_FUNCTION;
break;
case RX_STATE_EXPECT_FUNCTION:
frame_function = current_byte;
frame_index = 0;
rx_state = RX_STATE_COLLECT_DATA;
break;
case RX_STATE_COLLECT_DATA: {
uint16_t data_length = (frame_length >= 4) ? (uint16_t)(frame_length - 4) : 0;
if (data_length == 0 || data_length > sizeof(frame_buffer)) {
rx_state = RX_STATE_EXPECT_HEAD1;
break;
}
frame_buffer[frame_index++] = current_byte;
if (frame_index >= data_length) {
uint8_t calculated_checksum = (uint8_t)(FRAME_HEAD1 + FRAME_HEAD2 + frame_length + frame_function);
for (uint16_t i = 0; i < data_length - 1; ++i) {
calculated_checksum = (uint8_t)(calculated_checksum + frame_buffer[i]);
}
uint8_t received_checksum = frame_buffer[data_length - 1];
if (calculated_checksum == received_checksum) {
_parse_frame_data(frame_function, frame_buffer);
}
rx_state = RX_STATE_EXPECT_HEAD1;
}
} break;
default:
rx_state = RX_STATE_EXPECT_HEAD1;
break;
}
}
}
/* ---------- 解析数据帧 / Parse one complete frame ---------- */
static void _parse_frame_data(uint8_t frame_function, const uint8_t *frame_data)
{
if (frame_function == IMU_FUNC_RAW_ACCEL) {
float accel_ratio = 16.0f / 32767.0f;
s_ax = to_int16(&frame_data[0]) * accel_ratio;
s_ay = to_int16(&frame_data[2]) * accel_ratio;
s_az = to_int16(&frame_data[4]) * accel_ratio;
float deg_to_rad = 3.14159265358979323846f / 180.0f;
float gyro_ratio = (2000.0f / 32767.0f) * deg_to_rad;
s_gx = to_int16(&frame_data[6]) * gyro_ratio;
s_gy = to_int16(&frame_data[8]) * gyro_ratio;
s_gz = to_int16(&frame_data[10]) * gyro_ratio;
float mag_ratio = 800.0f / 32767.0f;
s_mx = to_int16(&frame_data[12]) * mag_ratio;
s_my = to_int16(&frame_data[14]) * mag_ratio;
s_mz = to_int16(&frame_data[16]) * mag_ratio;
} else if (frame_function == IMU_FUNC_EULER) {
s_roll = to_float(&frame_data[0]);
s_pitch = to_float(&frame_data[4]);
s_yaw = to_float(&frame_data[8]);
} else if (frame_function == IMU_FUNC_QUAT) {
s_q0 = to_float(&frame_data[0]);
s_q1 = to_float(&frame_data[4]);
s_q2 = to_float(&frame_data[8]);
s_q3 = to_float(&frame_data[12]);
} else if (frame_function == IMU_FUNC_BARO) {
s_height = to_float(&frame_data[0]);
s_temperature = to_float(&frame_data[4]);
s_pressure = to_float(&frame_data[8]);
s_pressure_contrast = to_float(&frame_data[12]);
} else if (frame_function == IMU_FUNC_VERSION) {
s_version_high = frame_data[0];
s_version_mid = frame_data[1];
s_version_low = frame_data[2];
} else if (frame_function == IMU_FUNC_RETURN_STATE) {
s_last_rx_function = frame_data[0];
s_last_rx_state = (int16_t)frame_data[1];
}
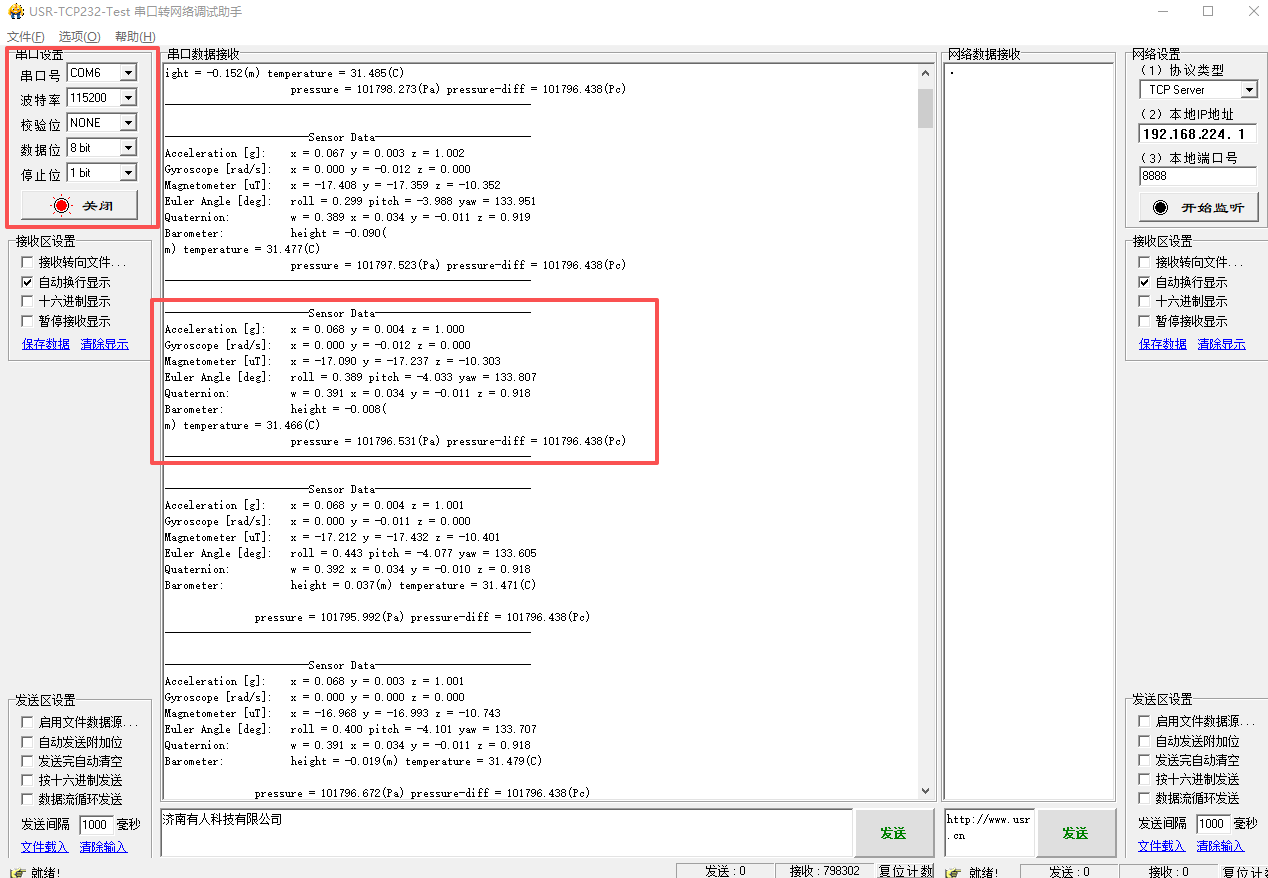
}(3)串口读取STM32数据
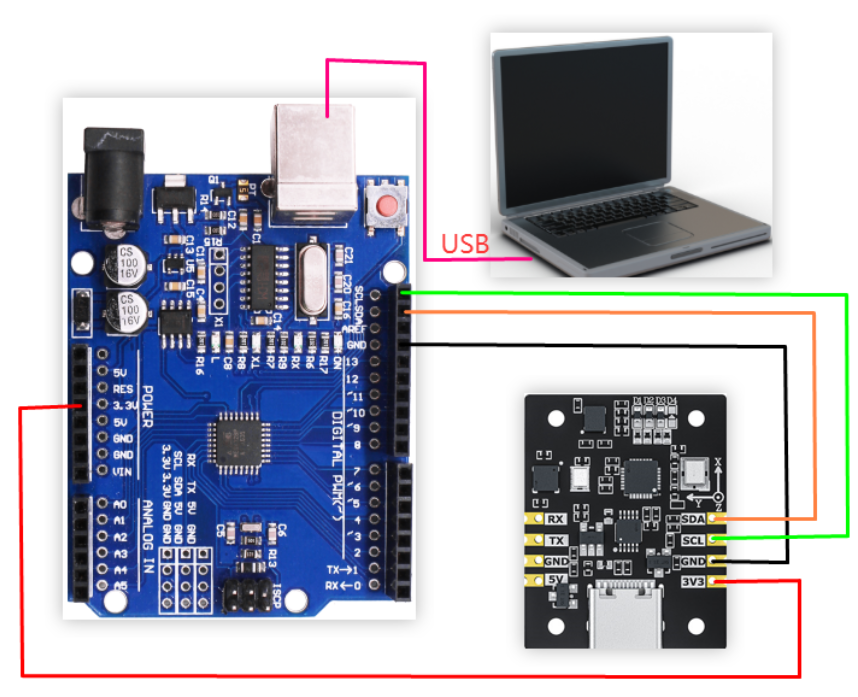
3、Arduino串口读取数据
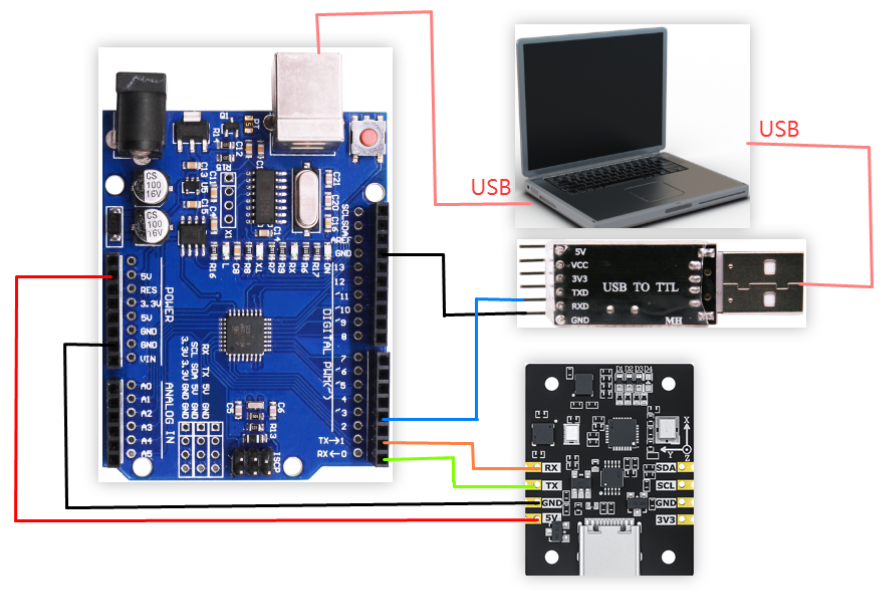
(1)接线说明

(2)关键代码说明
函数说明:
IMU_UART_Process(): 读取缓存的数据,并调用_parse_frame_data解析符合通信协议的数据。
_parse_frame_data():解析数据。
关键代码:
//解析环形缓冲中的数据,提取完整帧并更新缓存
//Process RX ring buffer, parse frames and update internal cache
void IMU_UART_Process(void)
{
enum {
RX_STATE_EXPECT_HEAD1 = 0,
RX_STATE_EXPECT_HEAD2,
RX_STATE_EXPECT_LENGTH,
RX_STATE_EXPECT_FUNCTION,
RX_STATE_COLLECT_DATA
};
static uint8_t rx_state = RX_STATE_EXPECT_HEAD1;
static uint8_t frame_length = 0;
static uint8_t frame_function = 0;
static uint8_t frame_buffer[64]; /* 数据区 + 校验 / data section + checksum */
static uint16_t frame_index = 0;
uint8_t current_byte = 0;
while (_rxbuf_pop(¤t_byte) == 0) {
switch (rx_state) {
case RX_STATE_EXPECT_HEAD1:
rx_state = (current_byte == FRAME_HEAD1) ? RX_STATE_EXPECT_HEAD2 : RX_STATE_EXPECT_HEAD1;
break;
case RX_STATE_EXPECT_HEAD2:
rx_state = (current_byte == FRAME_HEAD2) ? RX_STATE_EXPECT_LENGTH : RX_STATE_EXPECT_HEAD1;
break;
case RX_STATE_EXPECT_LENGTH:
frame_length = current_byte;
rx_state = RX_STATE_EXPECT_FUNCTION;
break;
case RX_STATE_EXPECT_FUNCTION:
frame_function = current_byte;
frame_index = 0;
rx_state = RX_STATE_COLLECT_DATA;
break;
case RX_STATE_COLLECT_DATA: {
uint16_t data_length = (frame_length >= 4) ? (uint16_t)(frame_length - 4) : 0;
if (data_length == 0 || data_length > sizeof(frame_buffer)) {
rx_state = RX_STATE_EXPECT_HEAD1;
break;
}
frame_buffer[frame_index++] = current_byte;
if (frame_index >= data_length) {
uint8_t calculated_checksum = (uint8_t)(FRAME_HEAD1 + FRAME_HEAD2 + frame_length + frame_function);
for (uint16_t i = 0; i < data_length - 1; ++i) {
calculated_checksum = (uint8_t)(calculated_checksum + frame_buffer[i]);
}
uint8_t received_checksum = frame_buffer[data_length - 1];
if (calculated_checksum == received_checksum) {
_parse_frame_data(frame_function, frame_buffer);
}
rx_state = RX_STATE_EXPECT_HEAD1;
}
} break;
default:
rx_state = RX_STATE_EXPECT_HEAD1;
break;
}
}
}
/* ---------- 解析数据帧 / Parse one complete frame ---------- */
static void _parse_frame_data(uint8_t frame_function, const uint8_t *frame_data)
{
if (frame_function == IMU_FUNC_RAW_ACCEL) {
float accel_ratio = 16.0f / 32767.0f;
s_ax = to_int16(&frame_data[0]) * accel_ratio;
s_ay = to_int16(&frame_data[2]) * accel_ratio;
s_az = to_int16(&frame_data[4]) * accel_ratio;
float deg_to_rad = 3.14159265358979323846f / 180.0f;
float gyro_ratio = (2000.0f / 32767.0f) * deg_to_rad;
s_gx = to_int16(&frame_data[6]) * gyro_ratio;
s_gy = to_int16(&frame_data[8]) * gyro_ratio;
s_gz = to_int16(&frame_data[10]) * gyro_ratio;
float mag_ratio = 800.0f / 32767.0f;
s_mx = to_int16(&frame_data[12]) * mag_ratio;
s_my = to_int16(&frame_data[14]) * mag_ratio;
s_mz = to_int16(&frame_data[16]) * mag_ratio;
} else if (frame_function == IMU_FUNC_EULER) {
s_roll = to_float(&frame_data[0]);
s_pitch = to_float(&frame_data[4]);
s_yaw = to_float(&frame_data[8]);
} else if (frame_function == IMU_FUNC_QUAT) {
s_q0 = to_float(&frame_data[0]);
s_q1 = to_float(&frame_data[4]);
s_q2 = to_float(&frame_data[8]);
s_q3 = to_float(&frame_data[12]);
} else if (frame_function == IMU_FUNC_BARO) {
s_height = to_float(&frame_data[0]);
s_temperature = to_float(&frame_data[4]);
s_pressure = to_float(&frame_data[8]);
s_pressure_contrast = to_float(&frame_data[12]);
} else if (frame_function == IMU_FUNC_VERSION) {
s_version_high = frame_data[0];
s_version_mid = frame_data[1];
s_version_low = frame_data[2];
} else if (frame_function == IMU_FUNC_RETURN_STATE) {
s_last_rx_function = frame_data[0];
s_last_rx_state = (int16_t)frame_data[1];
}
}(3)串口调试助手USB转TTL连接Arduino
4、STM32-IIC读取数据
(1)接线说明
(2)关键代码说明
函数说明:
IMU_I2C_ReadAccelerometer():读取加速度数据(单位 g)
IMU_I2C_ReadGyroscope():读取角速度(单位 rad/s)
IMU_I2C_ReadQuaternion():读取四元数
IMU_I2C_ReadEuler(): 读取欧拉角(弧度)
关键代码:
/**
* @brief 读取加速度数据(单位 g)
* Read acceleration in g.
*/
int IMU_I2C_ReadAccelerometer(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_ACCEL, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = 16.0f / 32767.0f;
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取角速度(单位 rad/s)
* Read angular velocity in rad/s.
*/
int IMU_I2C_ReadGyroscope(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_GYRO, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = (2000.0f / 32767.0f) * (3.1415926f / 180.0f);
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取磁场强度(单位 uT)
* Read magnetic field strength in micro tesla.
*/
int IMU_I2C_ReadMagnetometer(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_MAG, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = 800.0f / 32767.0f;
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取四元数
* Read quaternion (w, x, y, z).
*/
int IMU_I2C_ReadQuaternion(float out[4])
{
uint8_t register_data[16];
if (read_register(IMU_FUNC_QUAT, register_data, 16) != 0) {
return -1;
}
if (out != NULL) {
out[0] = to_float(®ister_data[0]);
out[1] = to_float(®ister_data[4]);
out[2] = to_float(®ister_data[8]);
out[3] = to_float(®ister_data[12]);
}
return 0;
}
/**
* @brief 读取欧拉角(弧度)
* Read Euler angles (rad).
*/
int IMU_I2C_ReadEuler(float out[3])
{
uint8_t register_data[12];
if (read_register(IMU_FUNC_EULER, register_data, 12) != 0) {
return -1;
}
if (out != NULL) {
const float RAD2DEG = 57.2957795f;
out[0] = to_float(®ister_data[0]) * RAD2DEG;
out[1] = to_float(®ister_data[4]) * RAD2DEG;
out[2] = to_float(®ister_data[8]) * RAD2DEG;
}
return 0;
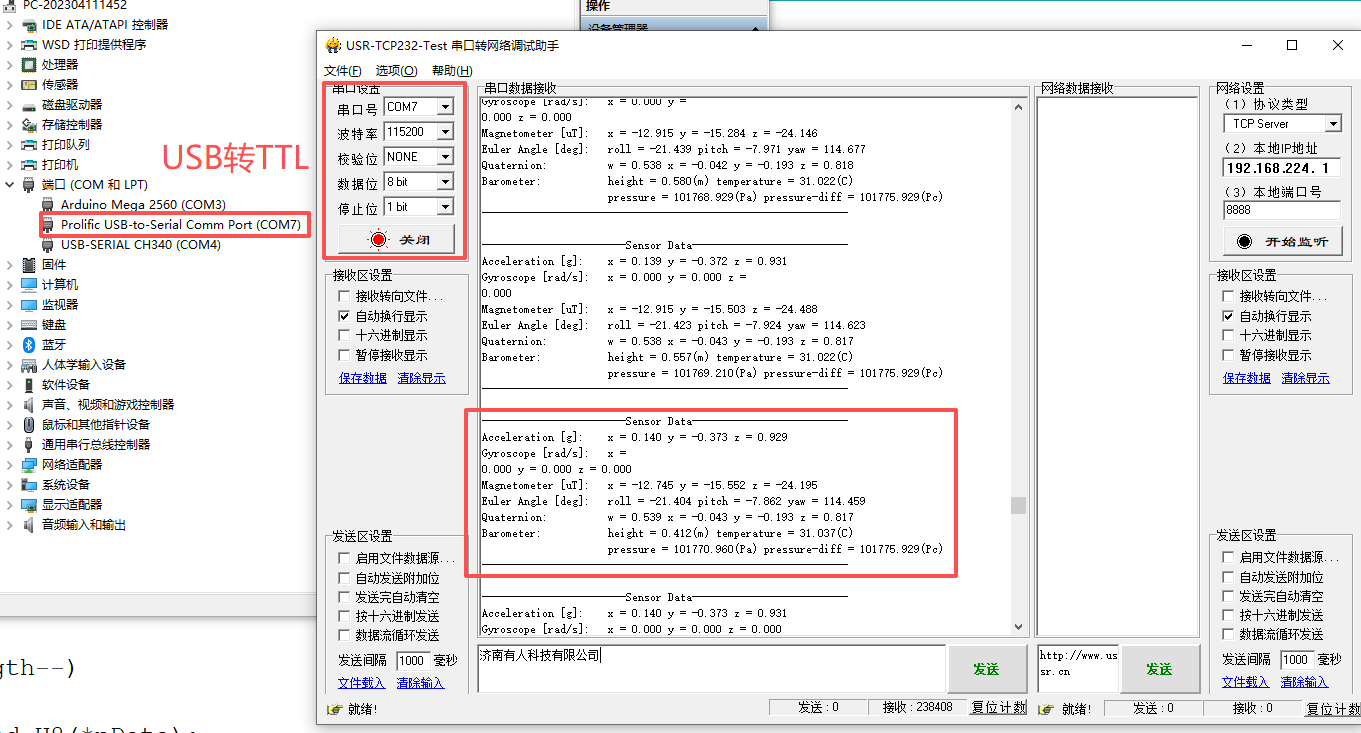
}(3)串口调试助手读取数据
5、Arduino-IIC读取数据
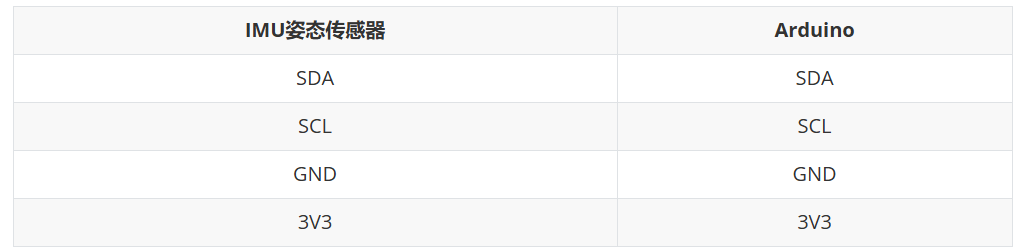
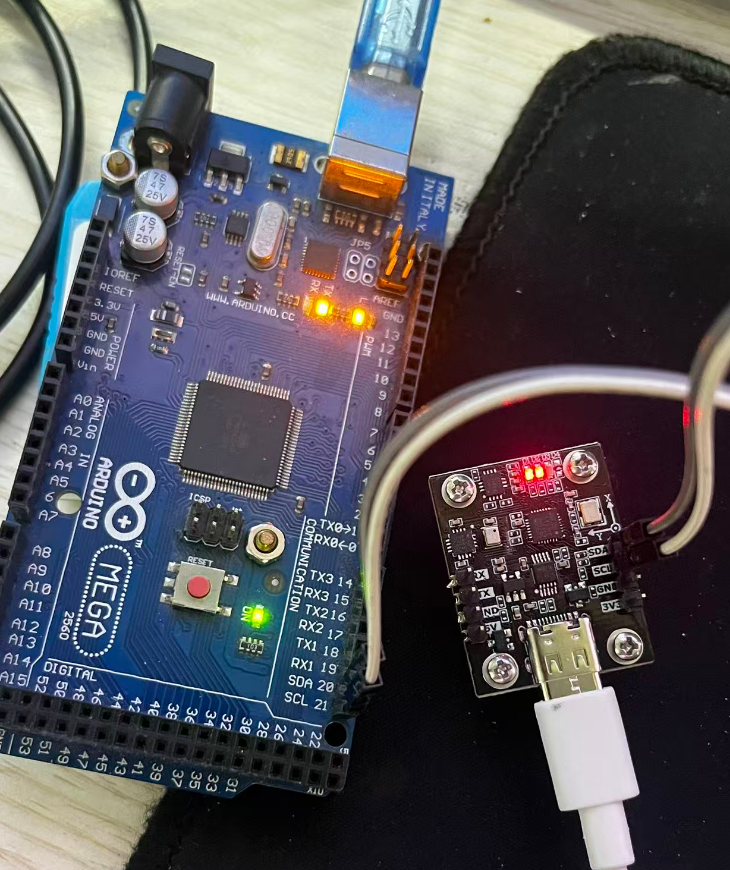
(1)接线说明
(2)关键代码说明
函数说明:
IMU_I2C_ReadAccelerometer():读取加速度数据(单位 g)
IMU_I2C_ReadGyroscope():读取角速度(单位 rad/s)
IMU_I2C_ReadQuaternion():读取四元数
IMU_I2C_ReadEuler(): 读取欧拉角(弧度)
/**
* @brief 读取加速度数据(单位 g)
* Read acceleration in g.
*/
int IMU_I2C_ReadAccelerometer(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_ACCEL, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = 16.0f / 32767.0f;
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取角速度(单位 rad/s)
* Read angular velocity in rad/s.
*/
int IMU_I2C_ReadGyroscope(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_GYRO, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = (2000.0f / 32767.0f) * (3.1415926f / 180.0f);
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取磁场强度(单位 uT)
* Read magnetic field strength in micro tesla.
*/
int IMU_I2C_ReadMagnetometer(float out[3])
{
uint8_t register_data[6];
if (read_register(IMU_FUNC_RAW_MAG, register_data, 6) != 0) {
return -1;
}
if (out != NULL) {
float ratio = 800.0f / 32767.0f;
out[0] = to_int16(®ister_data[0]) * ratio;
out[1] = to_int16(®ister_data[2]) * ratio;
out[2] = to_int16(®ister_data[4]) * ratio;
}
return 0;
}
/**
* @brief 读取四元数
* Read quaternion (w, x, y, z).
*/
int IMU_I2C_ReadQuaternion(float out[4])
{
uint8_t register_data[16];
if (read_register(IMU_FUNC_QUAT, register_data, 16) != 0) {
return -1;
}
if (out != NULL) {
out[0] = to_float(®ister_data[0]);
out[1] = to_float(®ister_data[4]);
out[2] = to_float(®ister_data[8]);
out[3] = to_float(®ister_data[12]);
}
return 0;
}
/**
* @brief 读取欧拉角(弧度)
* Read Euler angles (rad).
*/
int IMU_I2C_ReadEuler(float out[3])
{
uint8_t register_data[12];
if (read_register(IMU_FUNC_EULER, register_data, 12) != 0) {
return -1;
}
if (out != NULL) {
const float RAD2DEG = 57.2957795f;
out[0] = to_float(®ister_data[0]) * RAD2DEG;
out[1] = to_float(®ister_data[4]) * RAD2DEG;
out[2] = to_float(®ister_data[8]) * RAD2DEG;
}
return 0;
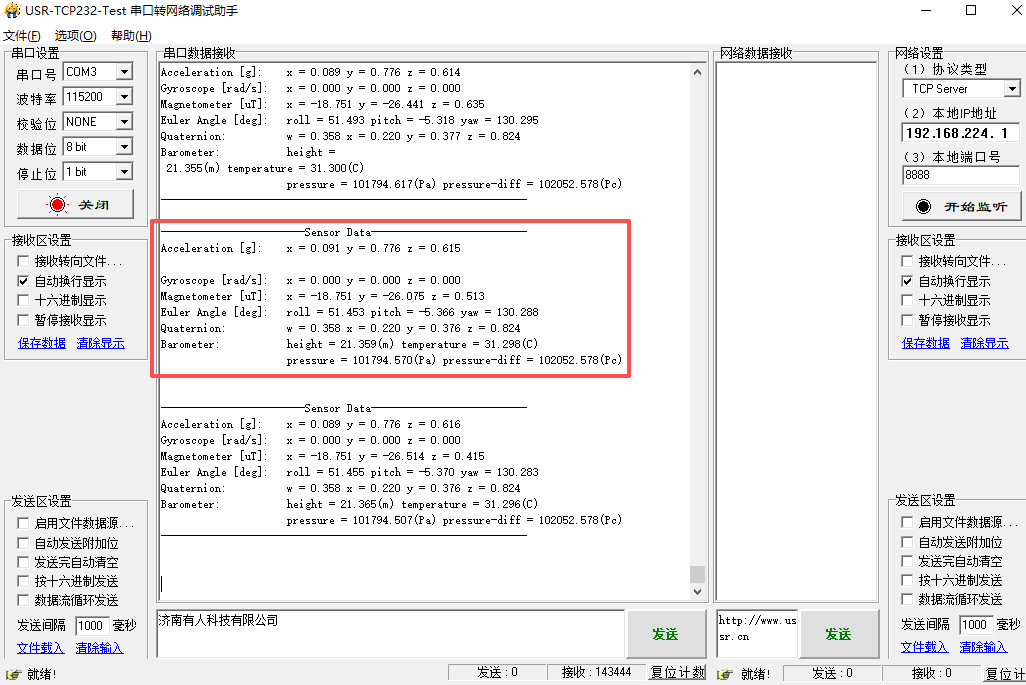
}(3)串口调试助手读Arduino数据
三、工程下载连接
https://download.csdn.net/download/panjinliang066333/92475902