概述
决策树是一种有监督学习算法,通过对训练样本学习建立分类或回归规则,以树状结构呈现,使所有数据从根节点逐步落到叶子节点得出预测结果。
决策树简单直观,无需数据预处理,能直接处理分类和回归任务,对缺失值不敏感,但容易过拟合,小样本下不稳定,单棵树精度通常不如集成方法。
节点
| 步骤 | 阶段 | 说明 |
|---|---|---|
| 1 | 根节点 | 所有数据进入根节点,依据首个最优特征进行第一次划分 |
| 2 | 非叶子节点 | 在中间节点按特征取值继续二分/多分,数据沿路径向下传递 |
| 3 | 叶子节点 | 数据抵达叶子节点,输出最终预测结果(类别或数值) |
| 本质逻辑 |
根节点:第一次划分的节点,包含全部训练样本。
中间节点(非叶子节点):每次依据某特征的某个切分点,将数据分成子集后生成的节点;只要还能继续划分且满足继续分裂的条件,它就是中间节点。
叶子节点:无法继续分裂或达到停止条件的节点,直接输出预测结果。
节点分裂标准的依据
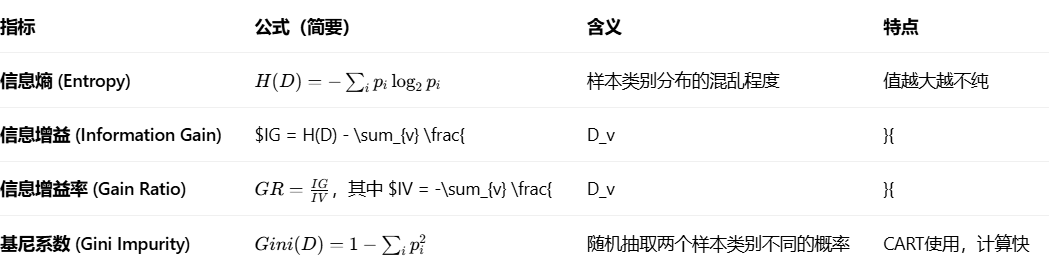
分裂的目标是让子节点比父节点更"纯"或更"精确"。常用指标如下:
分裂方式
离散特征
多叉分裂:按每个取值创建一个分支(ID3、C4.5)
二元分裂:将某些取值归为一类,其余归为另一类(CART)
连续特征
排序后尝试切分点(通常取相邻值的中点或分位数点),生成左右两个子集(CART、C4.5)
ID3算法
衡量标准熵值
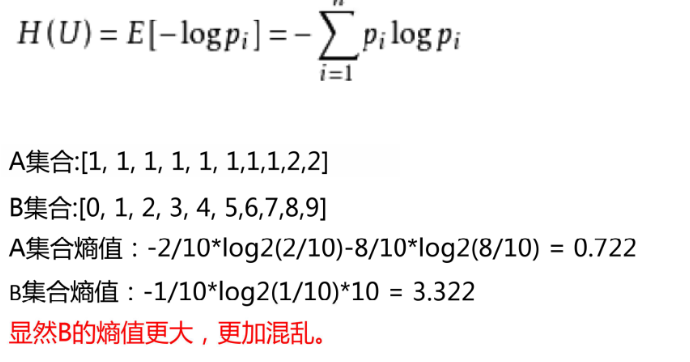
熵(Entropy)源于信息论(Shannon 1948),用来度量一个系统的不确定性或信息量。
在决策树中,熵用来衡量数据集类别分布的混杂程度:
熵 = 0 → 数据完全纯净(所有样本属于同一类别)
熵越大 → 类别分布越均匀,越难预测
C4.5算法
C4.5 是分类决策树算法,核心目标与 ID3 一致------通过特征划分让子集更纯,但解决了 ID3 的几个关键短板:
在 ID3 算法中,我们用信息增益(IG)来选择划分特征:它会优先挑"取值多、能带来很多分支"的特征(比如"客户 ID"这种唯一标识类特征)。但这类特征往往对分类没有实际意义,只是把每个样本单独分成一类,属于"过拟合""无意义划分"。
为了克服这种"偏向于选择取值多的特征"的问题,C4.5 引入了 "信息增益比(Information Gain Ratio,IGR) 做归一化,让特征选择更合理。

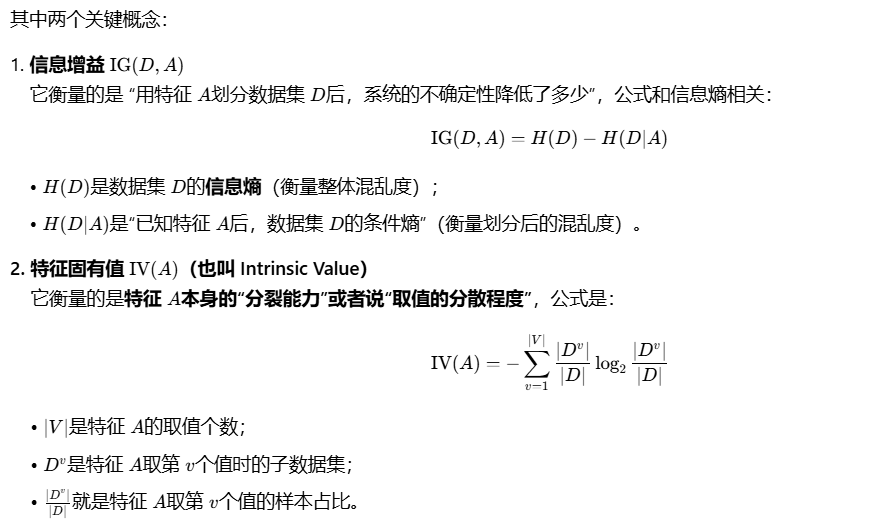
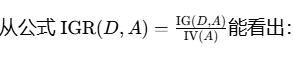
若特征 A取值特别多(比如"客户 ID",每个客户对应唯一值),那么 IV(A)会很大(因为每个子集占比都很小,log后再求和处理后数值大)。此时就算 IG(D,A)不小,除以一个很大的 IV(A)后,IGR(D,A)也会被"拉低"。
→ 这就避免了像 ID3 那样,只因为某个特征取值多,就把无意义的特征选进来。
ID3选分裂特征时,容易偏爱取值多的无意义特征(比如"用户ID"),虽然按它划分后数据看起来很"纯",但对实际分类毫无帮助。
C4.5的解决办法:用信息增益率(信息增益 ÷ 特征自身熵)选特征。
特征自身熵(固有值):衡量特征取值的复杂程度(取值越多越分散,自身熵越高)。
核心逻辑:若特征取值极多(如ID),自身熵会很大 → 信息增益率被"惩罚"变低,避免被选中;反之,取值合理且能显著提升数据纯净度的特征,信息增益率更高,会被优先选为分裂依据。
结果:选出的特征既能让数据更纯净,又不会被无意义的多值特征干扰
CART算法
CART决策树通过最小化基尼指数选择分裂特征------基尼指数衡量数据的不纯度(值越小越纯净),对每个特征计算按其划分后所有子集的基尼指数总和,选择使总和最小的特征作为分裂点,从而让划分后的子集尽可能属于同一类别,实现高效且纯净的分类划分。
决策树剪枝
决策树剪枝是通过简化树结构来提升模型泛化能力的关键方法,核心目标是防止过拟合(即树过于复杂,记住训练数据噪声而非真实规律)。剪枝分为预剪枝和后剪枝两种主流策略,通常优先选择计算高效、效果稳定的预剪枝。
预剪枝
在树生成过程中提前停止分裂,常见策略包括:
限制树的深度(如最多5层);
限制叶子节点数量或样本数(如每个叶子至少包含10个样本);
设定基尼系数/信息增益阈值(如分裂后指标提升小于0.01则停止)。
优点:训练速度快,计算成本低;缺点:可能因过早停止错过潜在有用分支。
决策树优缺点
优点
简单直观:树形结构清晰呈现逻辑规则,易于理解。
无需标准化:数值特征无须缩放,直接输入模型。
兼容多类型:同时支持离散和连续特征混合输入。
耐受缺失值:对数据缺失不敏感,鲁棒性强。
多任务适用:可用于分类和回归两类问题。
缺点
容易过拟合:过度拟合训练数据中的噪声,泛化能力差。
小样本不稳定:数据量少时结果波动大。
类别不平衡敏感:少数类样本易被多数类主导。
精度局限:单棵树精度通常低于集成方法(如随机森林、XGBoost)。
决策树回归模型
决策树回归树)是通过递归划分特征空间,用叶节点样本均值预测连续型标签(如房价、消费额)的树形模型。
分类树用「纯度」(比如基尼系数、信息熵)来衡量划分好坏;
回归树用「误差最小化」来衡量划分好坏,最终每个叶子节点输出的是该区域内样本标签的均值。
整体建模流程可以概括为:
选择最优特征与最优切分点:遍历所有特征、所有可能的切分位置,找到能让"划分后左右子区域误差之和最小"的那个特征与切分点;
递归划分:把当前区域按照"最优特征+最优切分点"拆成左右两个子区域,对每个子区域重复步骤1,直到满足停止条件(比如节点样本数太少、误差下降不明显、达到预设最大深度等);
叶子节点输出:每个叶子节点存储该区域内所有样本标签的均值,作为这个区域对未知样本的预测值。
回归树要解决的核心问题是:怎么切分,才能让划分后的区域"整体预测误差最小"?这里需要先定义"误差"的度量方式,最常见的就是 均方误差 和 平均绝对误差。
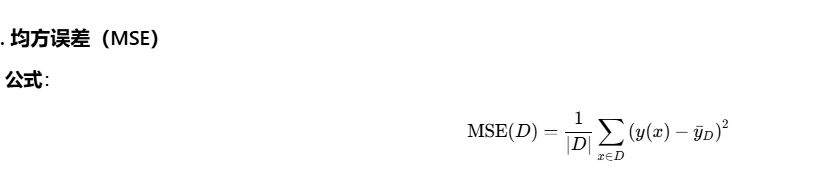 衡量数据集 D中,所有样本真实值与均值的平方差的平均值,反映数据的离散程度
衡量数据集 D中,所有样本真实值与均值的平方差的平均值,反映数据的离散程度

Scikit-learn中的决策树实现
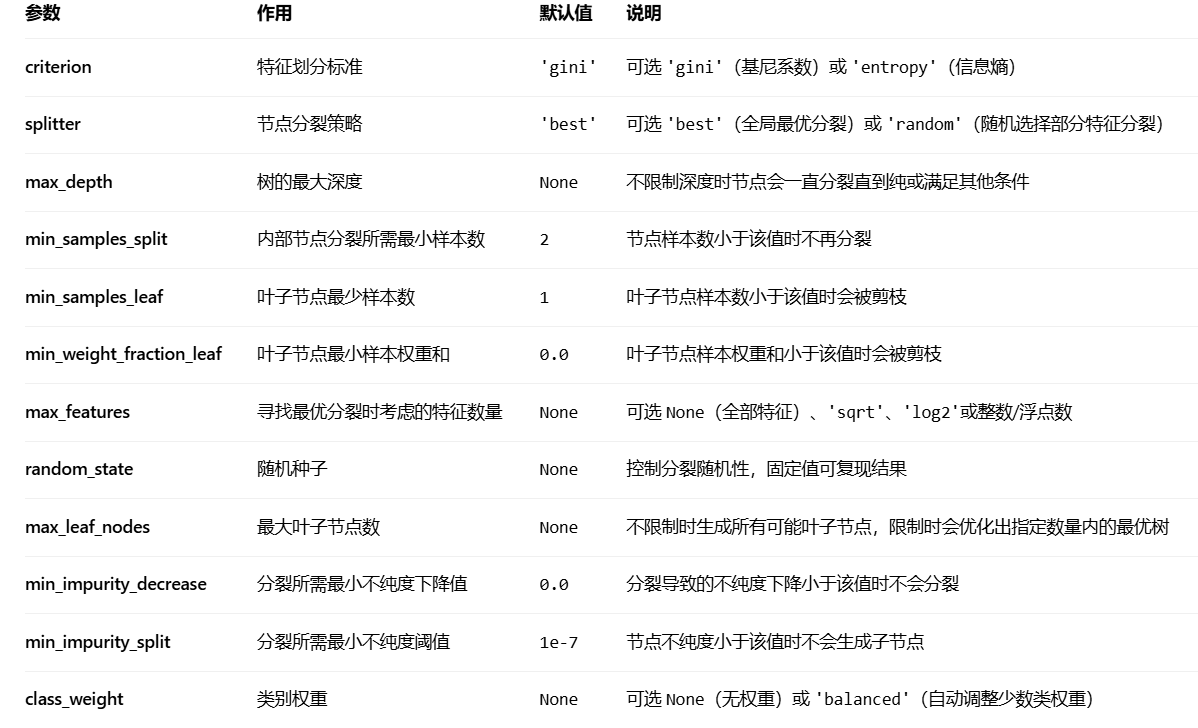
核心参数
AUC
AUC 是ROC 曲线下方的面积,用于量化二分类模型区分正负样本的能力------AUC 越接近 1,模型排序能力越强;越接近 0.5,模型等同于随机猜测。
AUC-ROC曲线
AUC:曲线下面积,衡量模型对正负样本的区分能力
ROC:接收者操作特征曲线,显示不同阈值下真正例率和假正例率的关系
AUC 的优缺点
优点
全面反映分类能力:综合考虑了分类器对正例和负例的区分能力,体现模型在所有阈值下的整体表现。
样本不平衡下依然有效:不依赖正负样本比例,在类别分布悬殊时仍能客观评估模型性能。
稳健可靠:不受样本不平衡问题干扰,是相对稳健的评价指标,避免因多数类主导而产生误导。
python
import numpy as np
import matplotlib.pyplot as plt
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from sklearn.tree import DecisionTreeClassifier
from sklearn.metrics import roc_curve, auc
# 生成示例数据
X, y = make_classification(n_samples=1000, n_features=20, n_classes=2, random_state=42)
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.3, random_state=42)
# 创建并训练决策树模型
clf = DecisionTreeClassifier(random_state=42)
clf.fit(X_train, y_train)
# 预测概率
y_pred_proba = clf.predict_proba(X_test)[:, 1] # 取正类的概率
# 计算ROC曲线和AUC
fpr, tpr, thresholds = roc_curve(y_test, y_pred_proba)
auc_result = auc(fpr, tpr)
# 绘制ROC曲线
plt.figure(figsize=(8, 6))
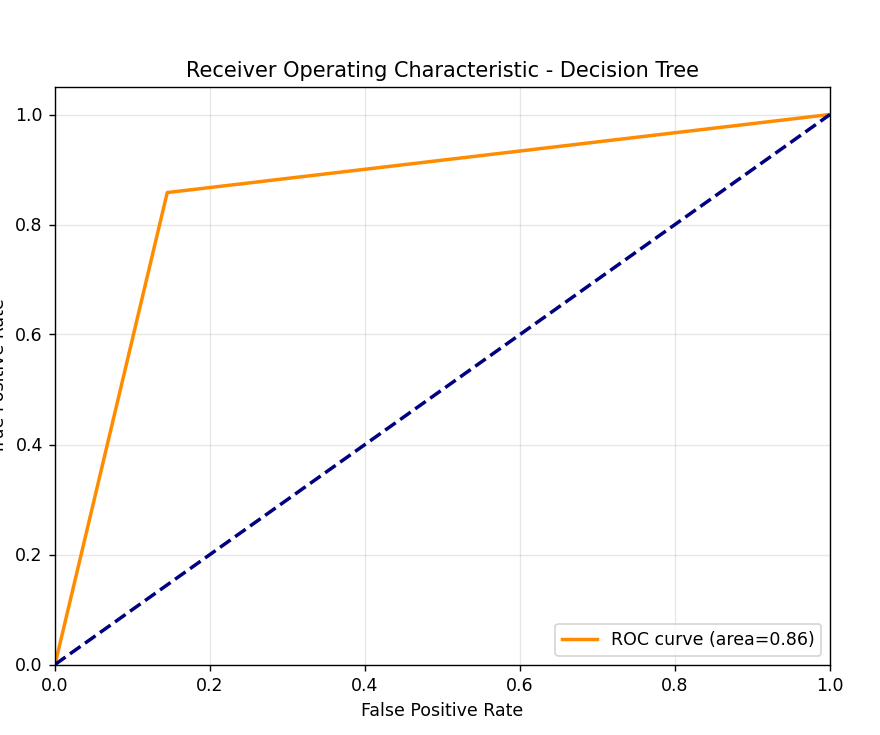
plt.plot(fpr, tpr, color='darkorange', lw=2, label=f'ROC curve (area={auc_result:.2f})')
plt.plot([0, 1], [0, 1], color='navy', lw=2, linestyle='--')
plt.xlim([0.0, 1.0])
plt.ylim([0.0, 1.05])
plt.xlabel('False Positive Rate')
plt.ylabel('True Positive Rate')
plt.title('Receiver Operating Characteristic - Decision Tree')
plt.legend(loc="lower right")
plt.grid(True, alpha=0.3)
plt.show()
print(f"AUC值为: {auc_result:.4f}")