1.汽车软件基础
1.1 汽车基本结构

1.2 汽车电子电气架构
1.2.1 汽车电子电气架构基本概念
汽车中各种电子设备形成的网络关系,电子设备之间通过什么样的网络结构连接起来 的叫汽车电子电气架构。电子指的是电子设备中偏弱电的设备,比如仪表、车机芯片。弱电一般界定在 36V 安全电压及以下。
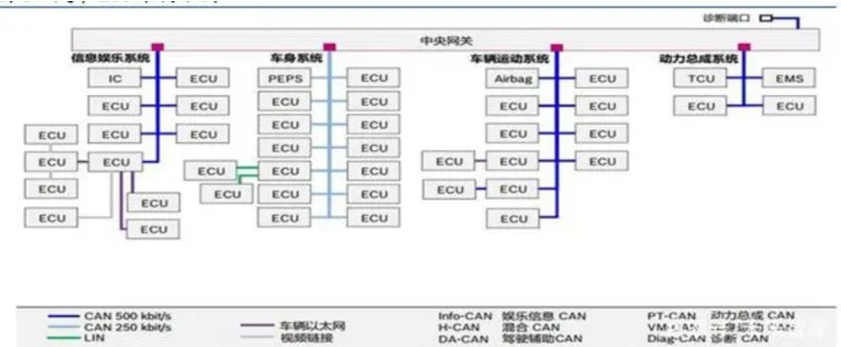
电子电气架构结构图如下:
分为控制单元 和控制单元构成的网络 (车载网络 )
主要的电子电气控制设备为: ECU 电子控制单元 、 DCU 域控制器 (将一些功能集中到一个控制器进行控制)

车载网络5域或3域 划分方式

1.2.2 为什么要分网段
ECU 数量本身不直接降低 CAN 总线的物理波特率(如 500kbps、1Mbps),但会通过增加总线负载 、电气负载与仲裁竞争,导致实际通信延迟上升 、有效吞吐量下降,表现为 "通信变慢" 的直观感受。影响因素如下:
- 总线负载与仲裁竞争(最主要因素)
CAN 总线为多主仲裁机制,同一时刻仅能有一个 ECU 发送报文:
ECU 增多→发送请求增加→仲裁冲突概率上升→等待时间变长
低优先级报文可能被高优先级报文持续抢占,出现 "饥饿" 现象
总线负载率 =(单帧时长 × 每秒总帧数)÷100%,负载越高,有效传输效率越低 - 电气负载限制(物理层约束)
每个 ECU 的 CAN 收发器都会增加总线寄生电容,ECU 越多电容越大
电容增大导致隐性电平上升时间延长,易产生位错误与错误帧
高速 CAN(如 1Mbps)对电容更敏感,通常限制节点数≤30 个;降低速率可支持更多节点(如 125kbps 可支持 60 + 节点) - 系统复杂度与处理瓶颈
节点增多→网络管理、诊断报文增加→进一步消耗带宽
部分 ECU 处理能力不足时,会成为整个网络的 "瓶颈",即使总线空闲也无法及时响应
报文过滤、信号解析等操作占用 ECU 资源,数量越多整体响应越慢。
怎么优化避免 ECU 增多导致的 "变慢"?
- 网络分段:使用 CAN 网关将大网络拆分为多个小网段(如动力 CAN、车身 CAN、娱乐 CAN),降低单总线负载
- 优先级规划:按功能重要性分配报文 ID(数值越小优先级越高),确保关键信号(如制动、转向)优先传输
- 报文优化:
合并信号到单帧,减少总帧数
合理设置周期(关键信号 10ms 级,普通信号 100ms 级,诊断信号 1s 级)
采用 CAN FD(数据段 64 字节)替代传统 CAN(8 字节),提升单帧效率
1.2.3 常见的独立网段
整个流程梳理 :车的电子电气架构主要有控制单元(ECU)和控制单元网络(车载网络)组成。由于ECU过多会影响单个ECU在车载网络上的通信时延,所以将车载网络进行网络分段,通过网关将大网络拆分为多个小网段(如动力 CAN、车身 CAN、娱乐 CAN),降低单总线负载。
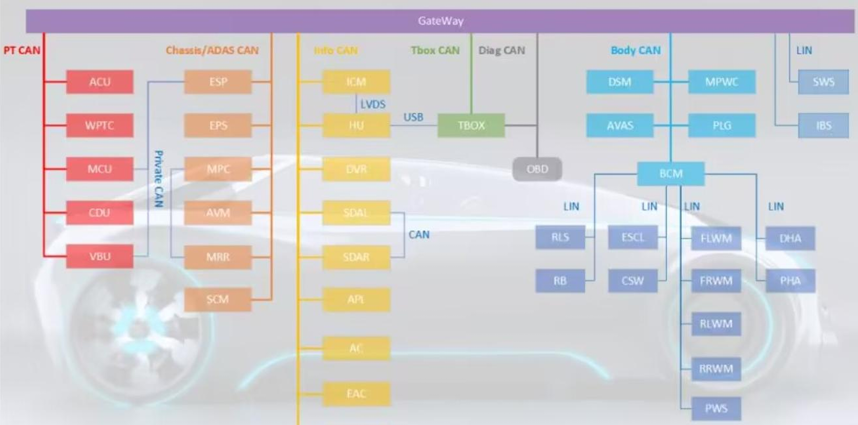
这个图片展示的是汽车车载网络架构图,它的分类逻辑是按 "功能域" 划分不同的通信网段(CAN/LIN 总线),再通过中央网关Gateway 实现各功能域之间的互联。
图中通过不同颜色 / 标识的总线,将车载电子模块按 "功能属性" 分成了多个独立网段:
- PT CAN(动力总成域 CAN)
对应动力系统功能,连接 ACU、WPTC、MCU、CDU、VBU 等模块(多为电机控制器、整车控制器等动力核心部件)。 - Chassis/ADAS CAN(底盘 + ADAS 域 CAN)
对应底盘控制 + 辅助驾驶功能,连接 ESP(电子稳定程序)、EPS(电动助力转向)、MPC、AVM(环视系统)、MRR(毫米波雷达)等模块,负责底盘操控与智能驾驶相关信号传输。 - Inf CAN(信息娱乐域 CAN)
对应车载信息娱乐功能,连接 ICM(信息娱乐主机)、IU(显示单元)、DVR(行车记录仪)、SDAL/SDAR(音视频模块)等,负责娱乐、显示类数据通信。 - Tbox CAN(车联网域 CAN)
对应远程通信功能,仅连接 TBOX(车载远程通信模块),负责车辆与云端 / 手机的交互。 - Diag CAN(诊断域 CAN )
对应诊断功能,连接 OBD 接口,是外部诊断设备与整车网络通信的专用网段。 - Body CAN(车身控制域 CAN)
对应车身附件控制功能,连接 BCM(车身控制模块)、DSM(驾驶状态监测)、AVAS(低速提示音)等模块;同时通过LIN 总线(低速辅助总线)连接 RLS(雨量传感器)、门窗电机(F.WM/R.WM 等)、传感器(IBS 等)等低数据量的车身部件。
分类的核心目的
按 "功能域" 划分网段,是为了隔离不同功能的通信流量 、降低单总线负载 、提升系统安全性与可靠性------ 比如动力域 / ADAS 域的实时信号,不会被信息娱乐域的非实时数据干扰;同时通过中央网关统一管理跨域数据交互。
1.2.4 车载网络网关基本概念和分类
车载网络网关 是连接汽车内部不同类型 、不同速率网段 的核心通信设备,它的核心作用是解决各网段之间的协议不兼容 、速率不匹配 、数据隔离与交互问题 ,是整车电子系统的 "中枢神经节点"。
传统汽车的电子模块多为点对点通信,而现代汽车采用分布式网络架构,按功能划分为多个网段:
- 动力网段(高速 CAN/CAN FD,500kbps-1Mbps):负责发动机、变速箱、制动系统通信;
- 车身网段(低速CAN,125kbps):负责车灯、车窗、空调控制;
- 舒适网段(LIN 总线,19.2kbps):负责座椅、后视镜等低端设备;
- 智能驾驶网段(以太网,100Mbps-1Gbps):负责 ADAS 传感器、车载娱乐、车联网数据传输。
网关就像这些网段之间的 "桥梁",同时具备数据转发、协议转换、网络管理、安全防护四大核心能力,是整车数据交互的唯一通道。
按功能分类:

1.2.5 汽车CAN总线网络
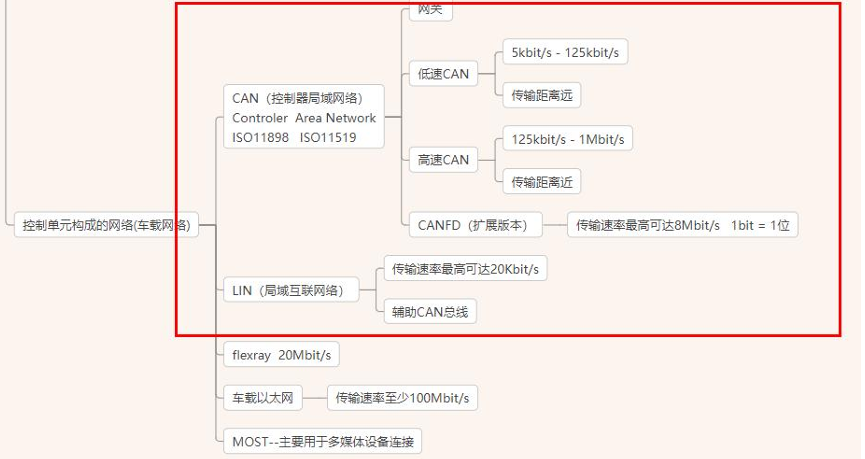
对于低速 CAN 采用开环设计,允许单线故障时继续通信,这种容错能力以降低速率为代价;高速 CAN 采用严格差分信号与终端匹配,确保高速信号完整性;CAN FD 复用高速 CAN 物理层,但通过协议创新实现更高带宽。
目前主流汽车网络仍然是CAN/LIN 网络,CAN 网络分高速CAN和低速CAN。 高速CAN连接动力、底盘等控制时间响应要求高的部
分,低速CAN用于车身、座舱设备方面。
汽车的CAN网络一般是分为 多个子网 ,再通过网关互联形成整车的CAN网络
1.2.5.1 CAN总线基础知识
CAN是控制器域网(Controller Area Network,CAN)的简称,CAN属于总线式串行通信网络。
什么是 "总线"?
总线是多个设备(节点)共享的 "公共通信通道",类比生活里的 "城市主干道":
- 传统 "点对点通信" 像 "每户之间单独修小路"------ 比如早期汽车里,每个 ECU(电子控制单元)之间都单独拉一根线传信号,会导致线缆多如蜘蛛网、成本高、布线复杂。
- 而 "总线" 像 "一条主干道,所有住户都连到这条路上"------ 所有设备(如车载 ECU)都连接到同一条总线线路上,共享这条通道传输数据,不用再点对点单独布线。
"总线式串行通信网络"= 多个设备共享同一条串行通信线路,典型代表就是车载 CAN 总线:
- 硬件上:所有 ECU 都并联在CAN_H、CAN_L 两根差分线(串行通信的物理线路)上;
- 通信逻辑:数据以 "串行位流"的形式在总线上传输,每个节点既能发送数据、也能接收数据;
- 冲突解决:通过 "ID 仲裁" 规则(比如 CAN 的优先级ID),避免多个节点同时发数据时的冲突。
1.2.5.2 Can 协议
Can 协议对应7层通讯模型中 物理层 和数据链路层 。
物理层 和数据链路层 ,可以类比成 "公路基础设施" 和 "交通规则"------ 物理层 是 "路本身",数据链路层是 "在路上怎么开车、怎么排队、怎么处理事故"。
Can 协议物理层规定
- 使用两根导线同时配合传输电信号,分CAN高和CAN低,以双绞形式布线
- CAN高输出3.5V 时,CAN低必须输出1.5V, 此时两根线之间的电压差(差分信号)为2V, 称为"显性信号", 表示二进制0;
CAN 高输出2.5V 时,CAN低必须输出2.5V, 此时两根线之间的电压差(差分信号)为0V, 称为"隐性信号", 表示二进制1; - 通常can高和can低之间 应该有一个120欧姆的终端电阻。

Can 协议数据链路层规定
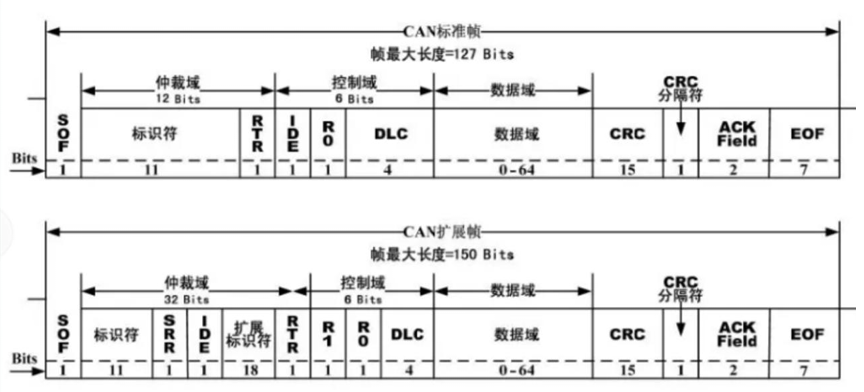
- CAN 总线发送2进制位的最小数量单位为"帧 "frame(报文), 传输数据最小的一个单位(最少的二进制位)都必须考虑传输控制信息 、传输的数据本身的信息 、校验信息 。