目录
[第一讲 数字图像处理概论](#第一讲 数字图像处理概论)
[第二讲 视觉过程与成像基础](#第二讲 视觉过程与成像基础)
[第三讲 采样量化与像素间关系](#第三讲 采样量化与像素间关系)
[第四讲 坐标变化与几何失真矫正](#第四讲 坐标变化与几何失真矫正)
[第五讲 空域滤波基础与灰度变换](#第五讲 空域滤波基础与灰度变换)
[第六讲 图像的直方图变换](#第六讲 图像的直方图变换)
[第七讲 图像的噪声抑制](#第七讲 图像的噪声抑制)
[第八讲 图像的锐化处理](#第八讲 图像的锐化处理)
[第九讲 图像分割](#第九讲 图像分割)
[第十讲 二值图像的分析](#第十讲 二值图像的分析)
[第十一讲 彩色图像处理](#第十一讲 彩色图像处理)
[第十二讲 基本图像变换](#第十二讲 基本图像变换)
[第十三讲 图像频域增强](#第十三讲 图像频域增强)
第一讲 数字图像处理概论
一、图像与数字图像
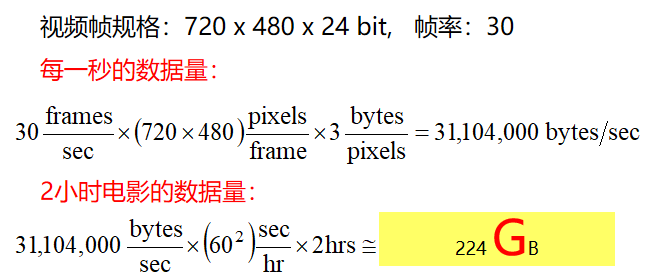
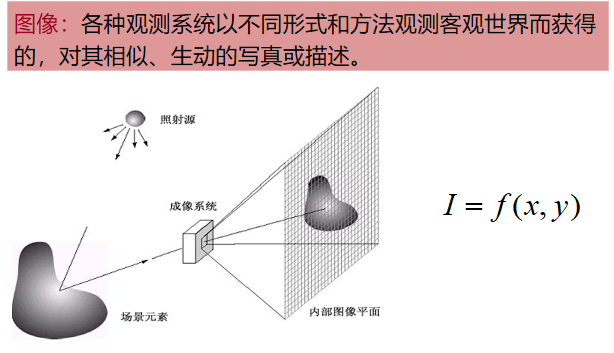
图像:各种观测系统以不同形式和方法观测客观世界而获得的,对其相似、生动的写真或描述
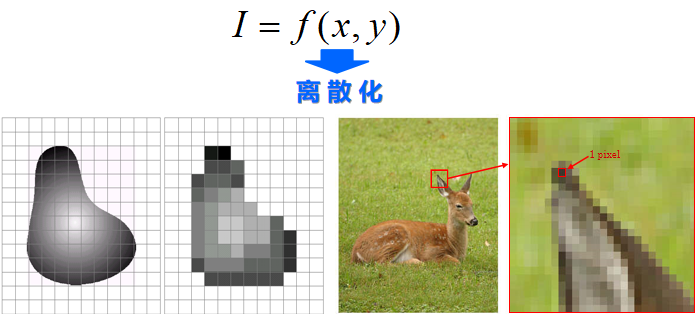
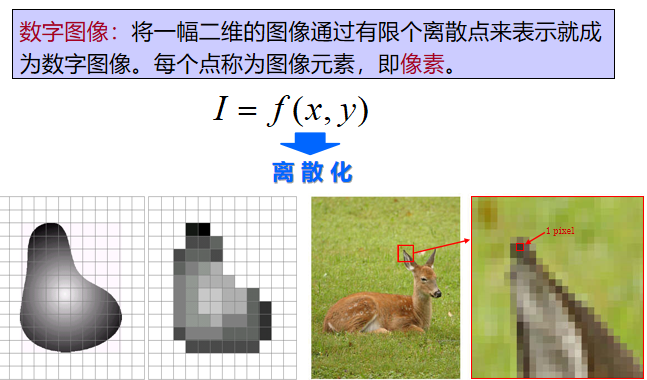
数字图像:将一幅二维的图像通过有限个离散点来表示就称为数字图像。每个点称为图像元素(像素)
像素值:用来表示像素的灰度级、颜色、高度值、透明度等等

二、数字图像处理与图像工程
数字图像处理"利用计算机对数字图像进行一系列操作,以获得某种预期结果
图像处理的目的*
(1)提高图像视觉质量的方法,达到赏心悦目的目的;
(2)提取图像中所包含的某些特征或特殊信息,便于计算机分析和识别;
(3)对图像数据编码和压缩,便于存储、传输;
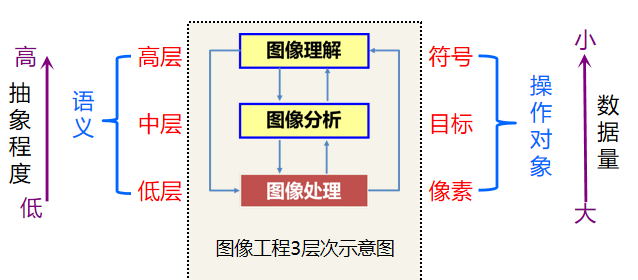
图像工程:研究各种图像理论、技术和应用的一门学科
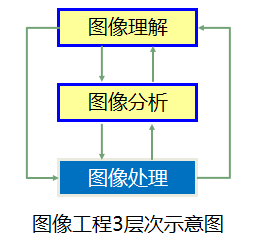
图像处理:
1.对图像进行各种编码加工,以改善图像视觉效果
2.对图像进行编码压缩,以降低所占存储空间
图像分析:对图像中感兴趣的目标进行检测和测量,以获取信息,建立对图像和目标的描述
图像理解:依据分析得到的目标特性及其相互关系,借助先验知识,得到目标的识别,以指导或规划行动
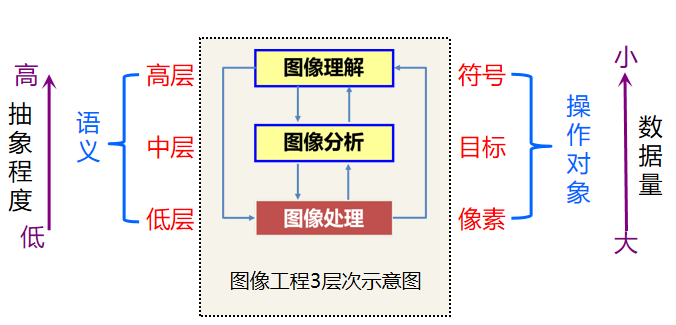
图像工程的三个层次(抽象程度、数据量)*
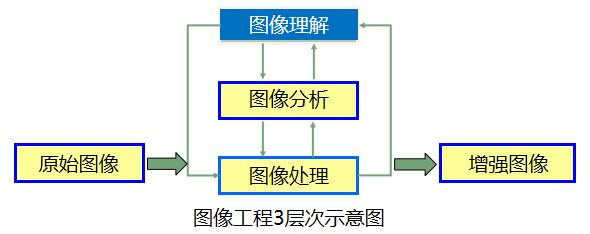
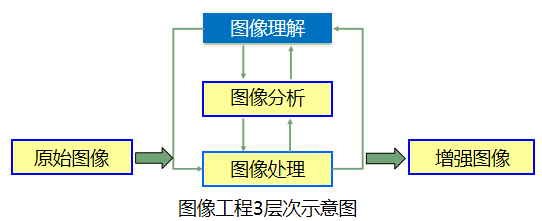
三、//数字图像处理系统
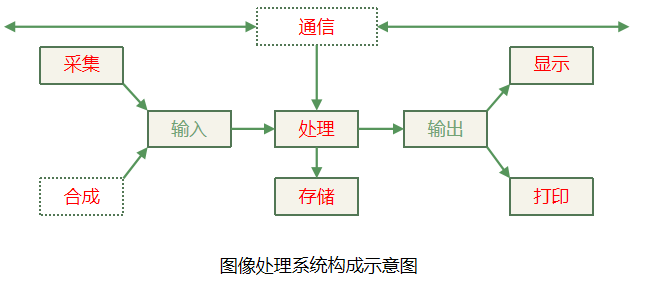
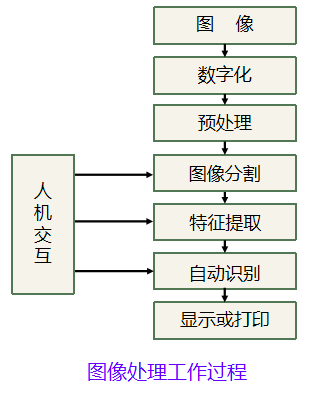
图像处理工作过程*
数字图像处理技术
图像增强
图像恢复
图像编码
图像分割
图像分类与识别
彩色图像处理
应用
工业生产
无损探伤,石油勘探,生产过程自动化(识别零件,装配质量检查),工业机器人研制等
遥感领域
自然灾害监测、预报,森林覆盖计算水利工程等的客观估计计算
森林火灾监测-客观反映火灾情况、面积
地势、地貌测绘以及地质构造解译、找矿,环境污染检测等农业普查
地理信息系统(GIS),数字图像处理技术广泛用于: 气象学 地形分类 操作卫星图像
球夜间灯光数据集 可以提供全球人类居住区的汇总情况
军事领域
测绘
无人机飞行控制
变化检测
气象预报
精确制导
其他领域
生物医学:利用电磁波谱成像分析系统诊断病情。如显微镜图像分析,DNA成像分析等
发展趋势
提高处理精度和速度
标准化
三维成像或多维成像
硬件芯片研究
新理论与新算法研究
与通信技术结合
课后题*
一、名词解释:图像,数字图像
二、简要叙述数字图像处理的目的
三、图像工程的三个层次模型包括哪三个层次,各层特点是什么?



四、上网查阅:图像处理技术在医学领域应用的相关文献,并给出两个在医学方面应用的例子
CT、B超、MR
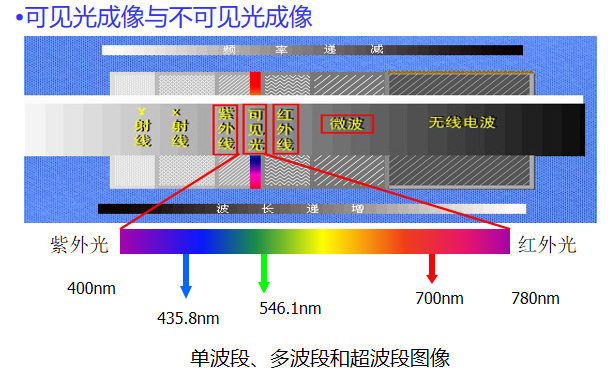
第二讲 视觉过程与成像基础
一、视觉过程
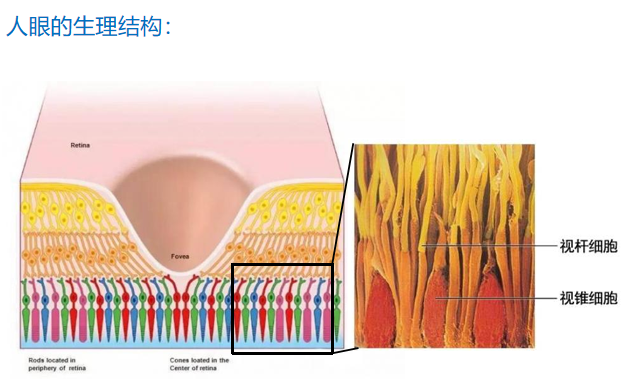
人眼的视觉过程:
光学过程
化学过程
神经处理过程
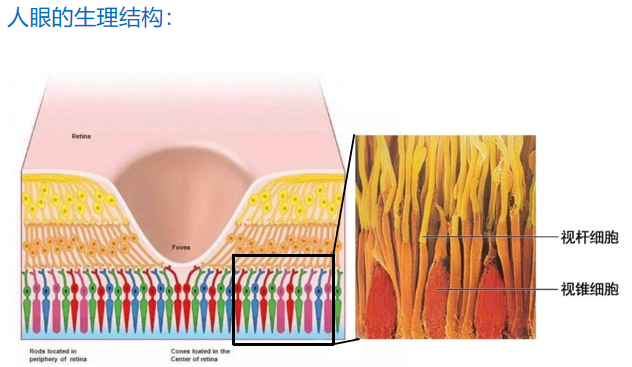
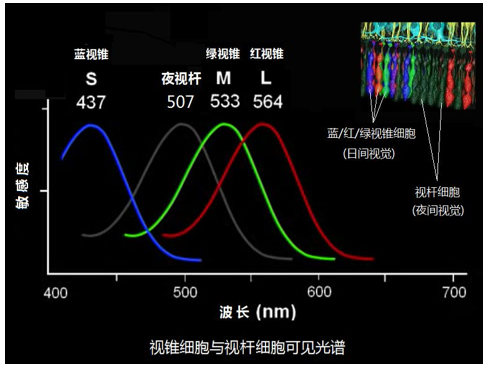
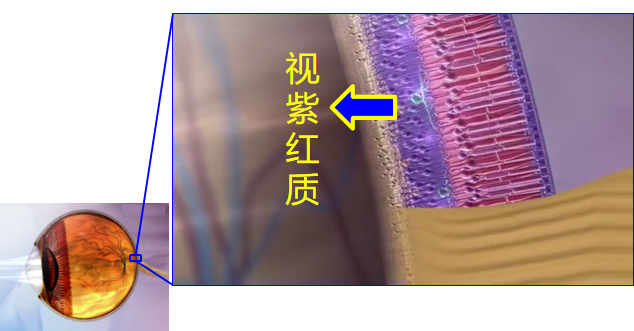
视锥细胞、视杆细胞*
白天(光照好)--视锥细胞(数量少) 红绿蓝
夜间(光线不好)--视杆细胞(数量多、灰色) 看不到颜色
视紫红质--蛋白质,光线强,变薄,感光细胞接受更多光线
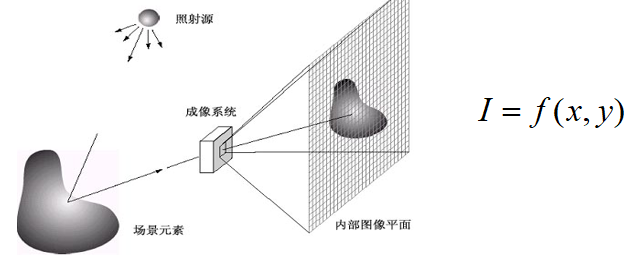
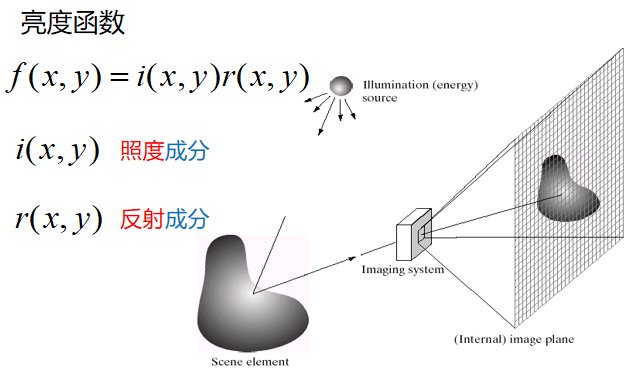
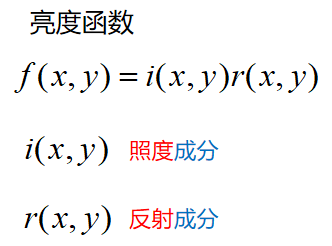
二、成像模型*
照度成分
照度是物体光被照射的程度。也即物体表面所得到的光通量与被照面积之比,单位是勒克斯lx (1勒克斯是1流明的光通量均匀照射在1平方米面积上所产生的照度)
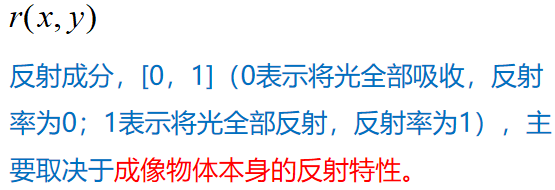
反射成分

课后题*
1、人眼视网膜中两类光接收细胞是什么,并简述各自的特点
视杆细胞
夜间、光线不好的时环境下工作
主要分布在视网膜的周边区域
对颜色不敏感(黑白)
视锥细胞
白天、光照好的环境下
在中央凹区域
对颜色敏感(彩色)
数量较少
2、视觉形成的三个过程是什么?
光学过程
化学过程
神经处理过程
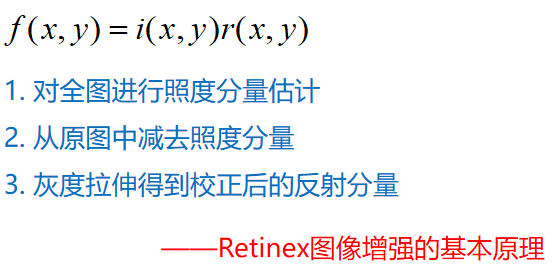
3、成像模型是怎么构成的?各组成部分的含义是什么?
f(x,y)=i(x,y)r(x,y)
照度成分i(x,y):0,+∞,主要取决于光源的照射强度
反射成分r(x,y):0,1,主要取决于成像物体本身的反射特性

第三讲 采样量化与像素间关系
一、采样与量化*
图像的空间分辨率和幅度分辨率与什么有关?
采样(空间分辨率):关注图像的空间分辨率
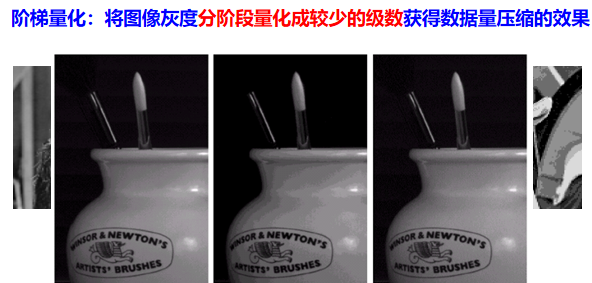
量化(幅度分辨率):关注图像的幅度分辨率

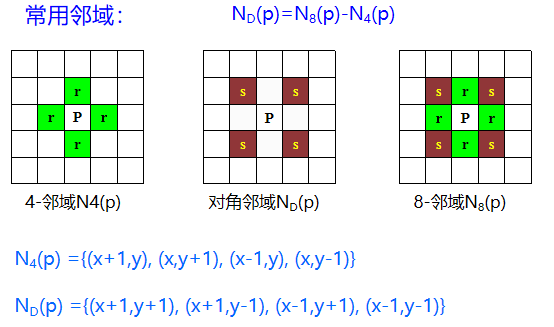
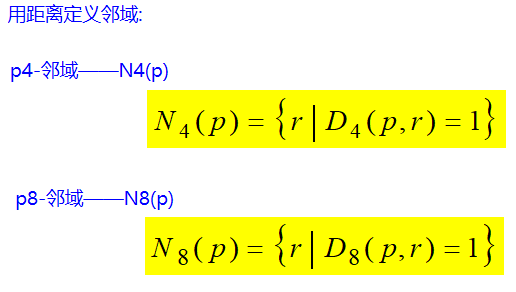
二、像素间关系
邻域:与某一像素邻近的像素的集合

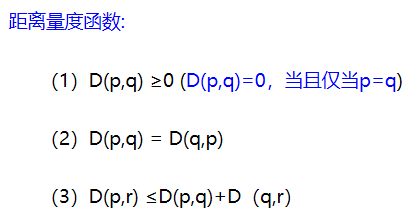
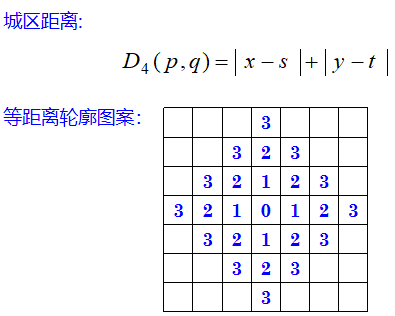
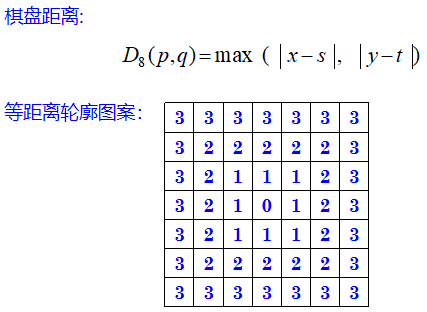
距离度量函数(欧式距离、城区距离、棋盘距离)
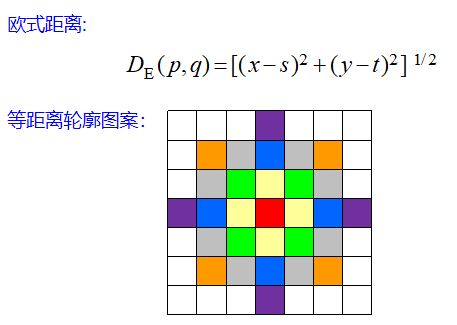
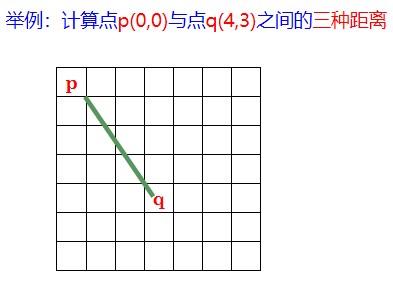
欧式距离、城区距离、棋盘距离计算*
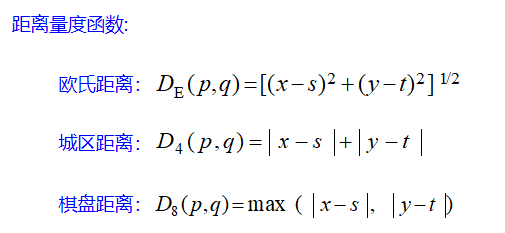
欧氏距离
城区距离
棋盘距离
课后题*
一、请计算像素点a(0,1)和像素点b(6,9)之间的欧氏距离,城区距离以及棋盘距离。
欧氏距离
城区距离
棋盘距离
二、图像的空间分辨率与幅度分辨率与什么有关?
空间分辨率(采样)与传感器技术、保持频率有关
幅度分辨率(量化)与人的视觉系统分辨率,与具体应用有关
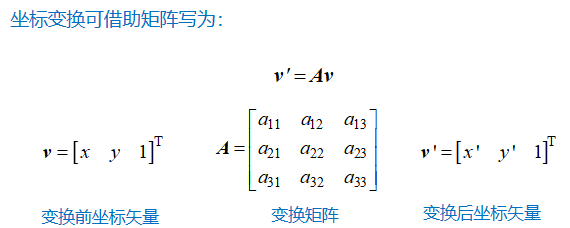
第四讲 坐标变化与几何失真矫正
一、坐标变换
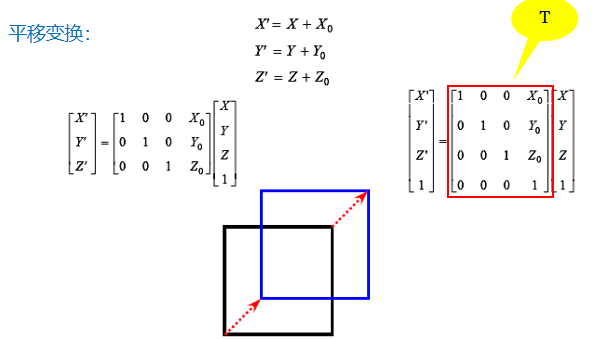
平移变换T
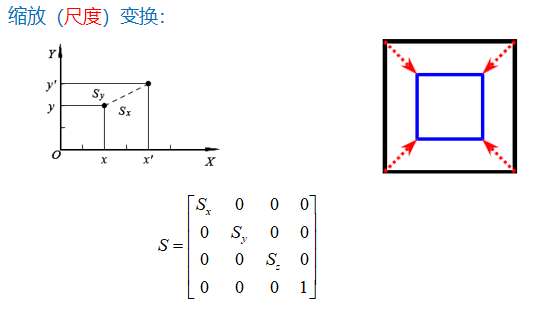
缩放(尺度)变换S
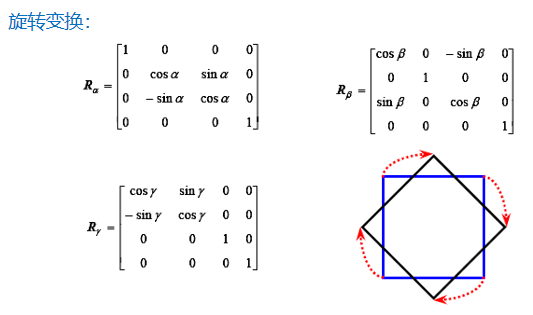
旋转变换R
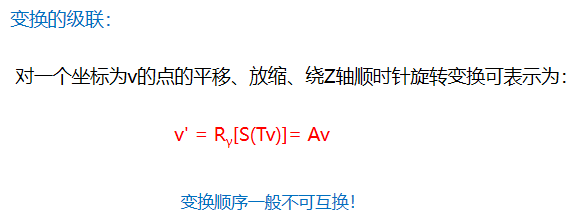
变换级联*
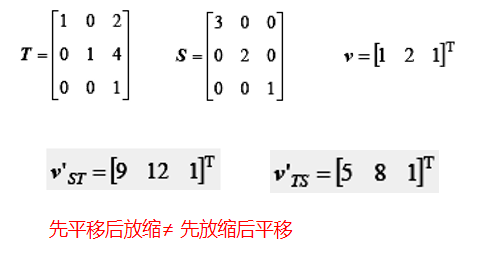
先平移后放缩
先放缩后平移
坐标反变换

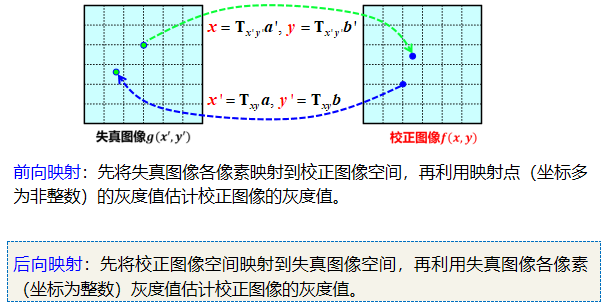
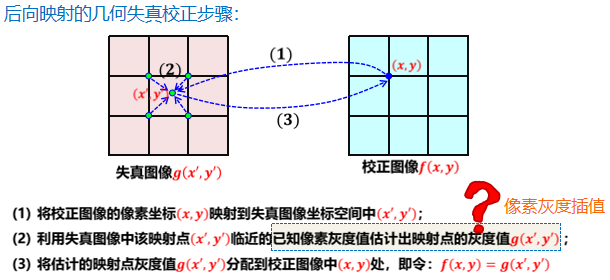
二、几何失真校正
几何失真现象的本质: 图像中像素的空间位置发生了几何畸变的现象
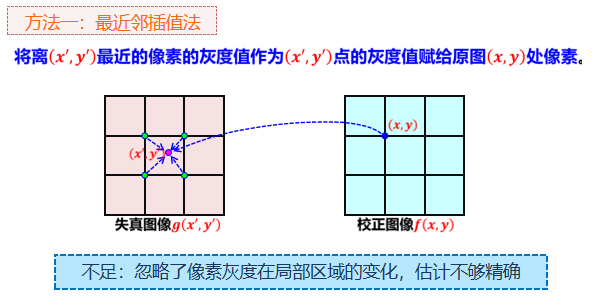
最近邻插值法
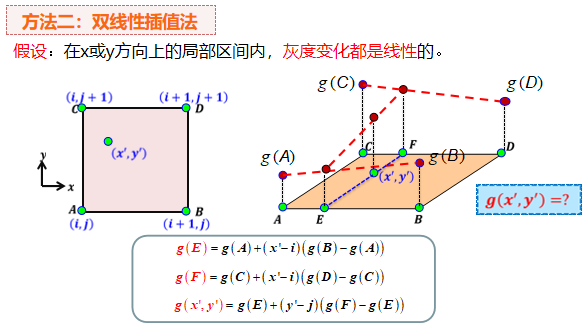
双线性插值法*
课后题*
第1题:某一坐标x,y,z先绕X轴顺时针旋转30°,然后再绕Y轴顺时针旋转45°,请写出坐标变换矩阵
绕x轴顺时针旋转30°(
=30°)
绕y轴顺时针旋转45°(
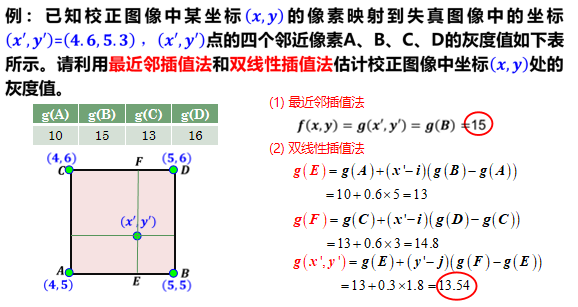
第2题:已知校正图像中某坐标(𝒙,𝒚)的像素映射到失真图像中的坐标( 𝒙′ , 𝒚') =(𝟒.3, 𝟓.6),(𝒙′,𝒚′)点的四个最近邻像素A、B、C、D的灰度值如下表所示。请利用最近邻插值法和双线性插值法估计校正图像中坐标(𝒙,𝒚)处的灰度值
|----------|----------|----------|----------|
| g(A) | g(B) | g(C) | g(D) |
| 10 | 15 | 13 | 1 |
(1)最近邻插值法
(x',y')=(4.3,5.6),离4近,离6近
f(x,y)=g(x',y')=g(C)=13
(2)双线性插值法
i=4,j=5
g(E)=g(A)+(x'-i)(g(B)-g(A))=10+(4.3-4)*(15-10)=11.5
g(F)=g(C)+(x'-i)(g(D)-g(C))=13+(4.3-4)*(16-13)=13.9
g(x',y')=g(E)+(y'-j)(g(F)-g(E))=11.5+(5.6-5)*(13.9-11.5)=12.94
第五讲 空域滤波基础与灰度变换
一、空域增强基础
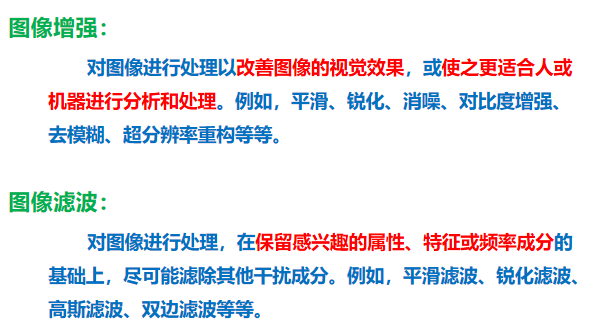
图像滤波:对图像进行处理,在保留感兴趣的属性、特征或频率成分的基础上,尽可能滤除其他干扰成分。例如,平滑滤波、锐化滤波、高斯滤波、双边滤波等等
图像增强:对图像进行处理以改善图像的视觉效果,或使之更适合人或机器进行分析和处理。例如,平滑、锐化、消噪、对比度增强、去模糊、超分辨率重构等等。
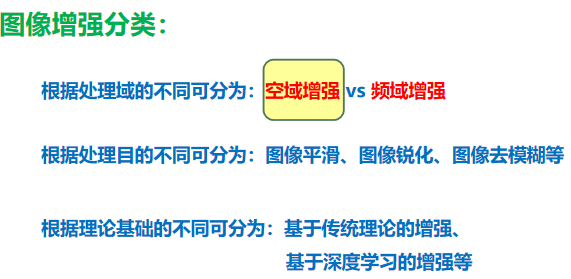
根据处理域的不同可分为:空域增强和频域增强
根据处理目的不同可分为:图像平滑、图像锐化、图像去模糊等
根据理论基础的不同可分为:基于传统理论的增强;基于深度学习的增强等;
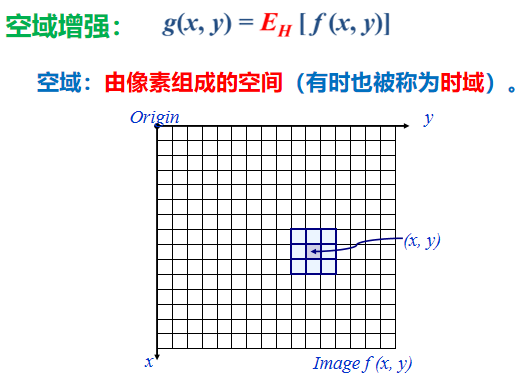
空域增强
空域:由像素组成的空间(有时也被称为时域)
基于点操作的增强
- 灰度变换
基于直方图操作的增强
- 直方图均衡化
- 直方图规定化
基于模版操作的增强
- 卷积运算
- 排序运算
二、图像间运算
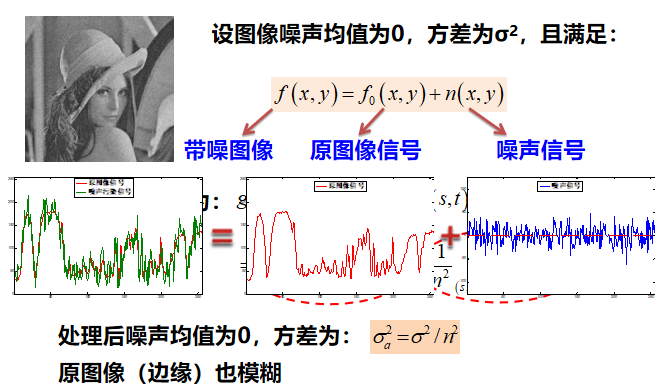
加法---可以滤除高斯零均值随机噪声
减法--可以检测运动信息
乘法--可以进行图像合成
除法--光照非均匀性校正、利于地物识别

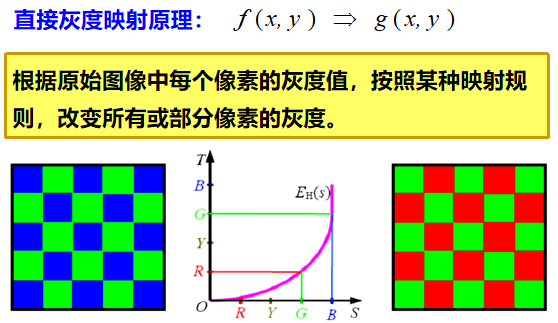
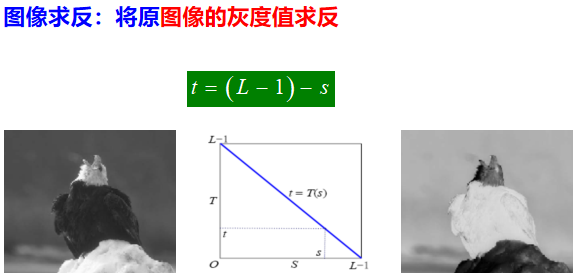
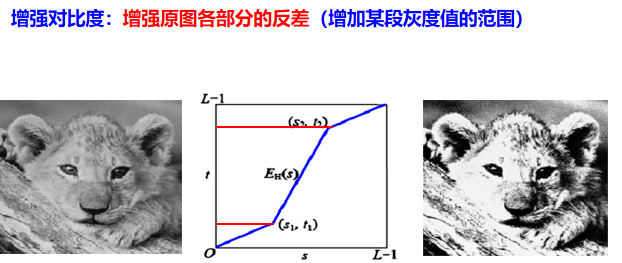
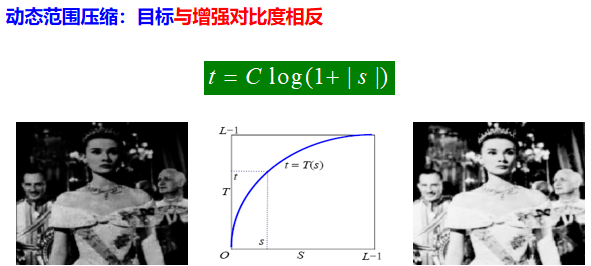
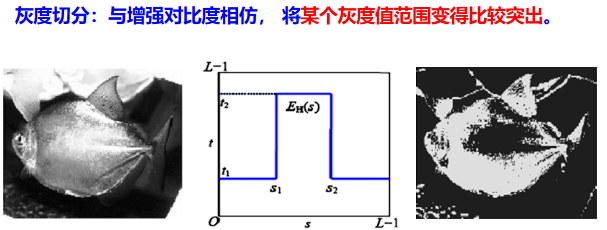
三、图像的灰度变换

1. 图像空域增强基础 强调:图像增强与图像滤波的联系与区别
2. 图像间运算 强调:复杂的图像处理算法通常是由一系列简单的图像的运算组合起来得到的综合效果
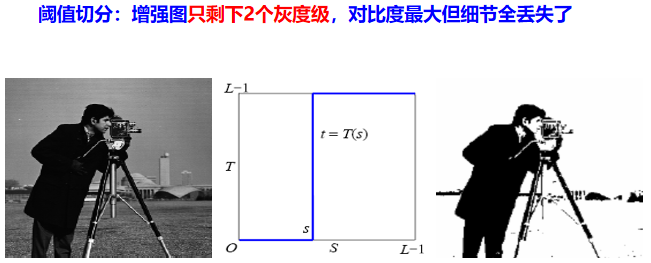
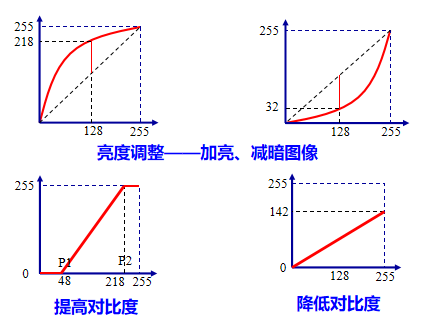
3. 图像的灰度变换 强调:如何设计灰度映射函数
课后题*
1、请设计一个灰度映射函数,使得通过该函数映射后的图像,其最小灰度值为C,最大灰度值为L-1(给出函数的表达式并画出对应的函数图像)
原始灰度值0,255 映射后灰度值C,L-1
即图像是一条经过(0,C),(255,L-1)的直线
f(0)=k*0+b=b=c
f(255)=k*255+b=L-1
2、如果要对静止摄像头获取的图像序列中的运动目标进行分割,你有什么好的想法吗?请简要描述你设计的算法思路
参考
利用静止摄像头采集多帧无运动目标的图像,构建背景模型
并将获取的图像序列与背景模型相减得到运动信息
将多幅噪声图像叠加取平均值,较少随机噪声影响
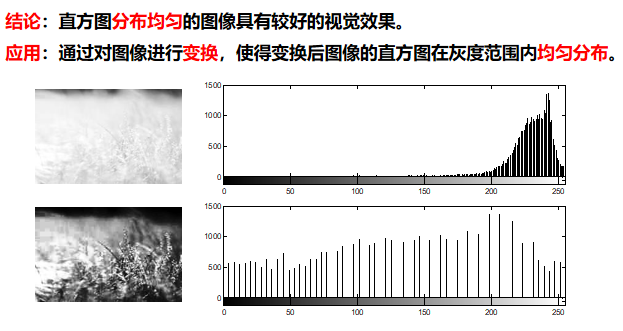
第六讲 图像的直方图变换
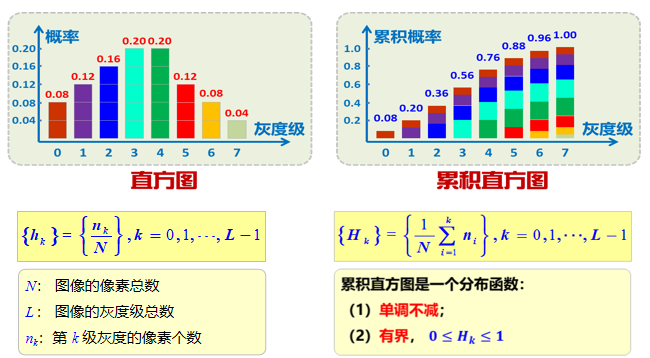
直方图*
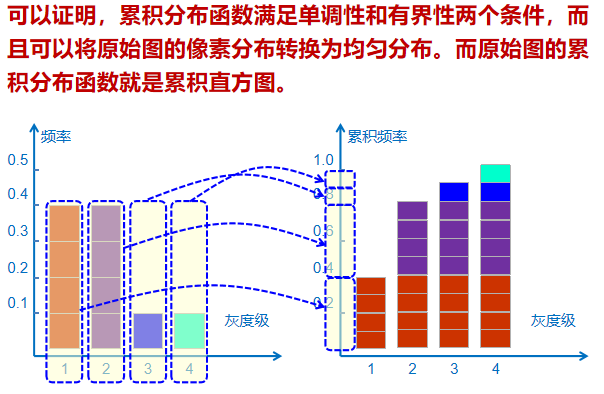
一、直方图均衡化原理*
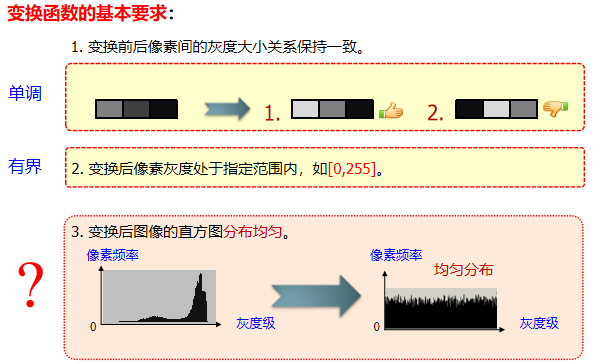
二、变换函数设计*
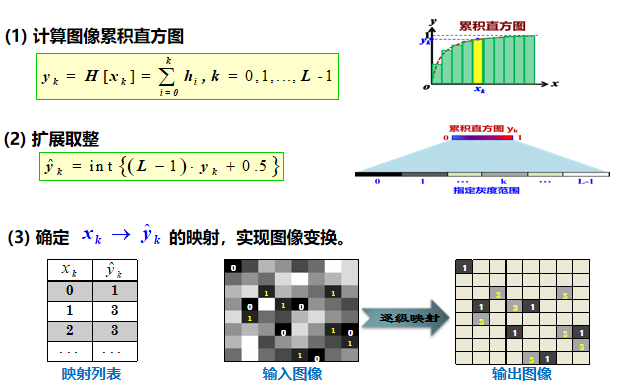
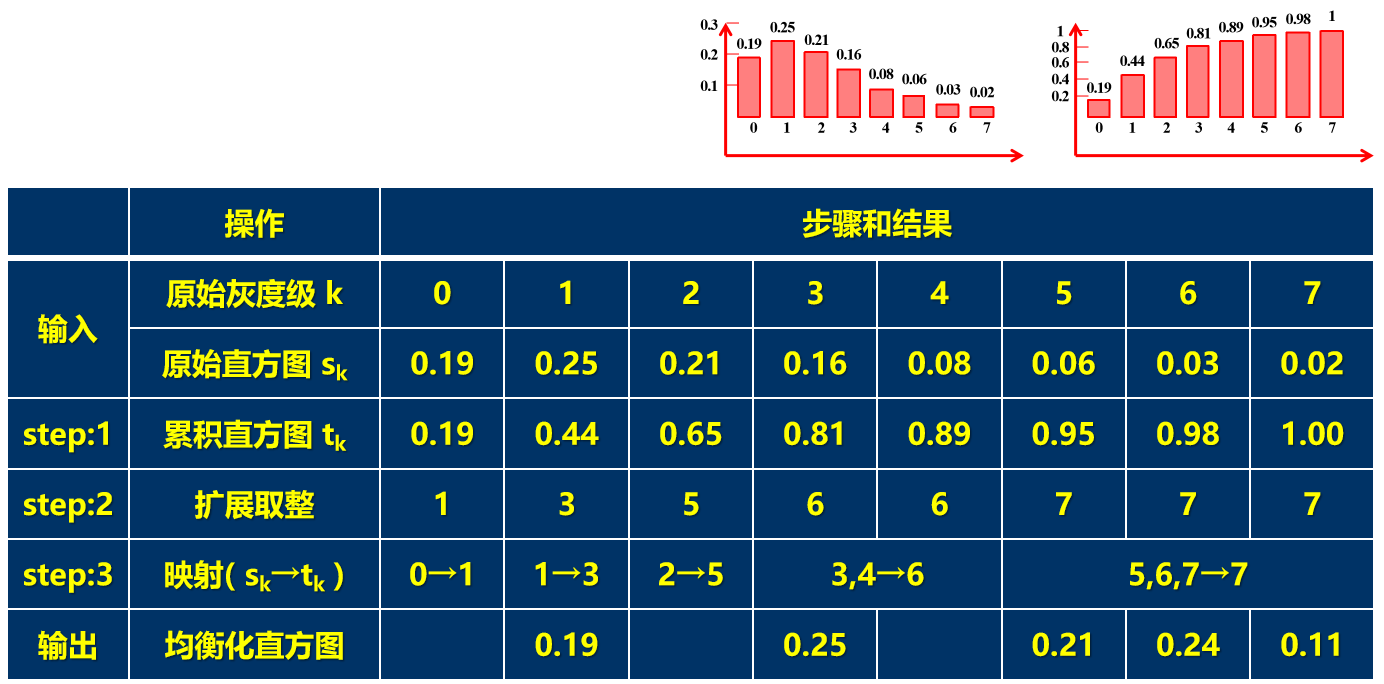
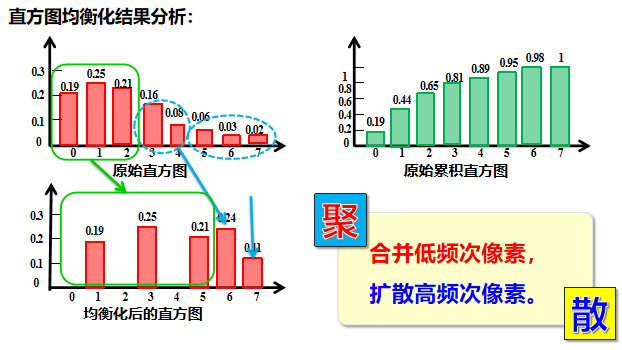
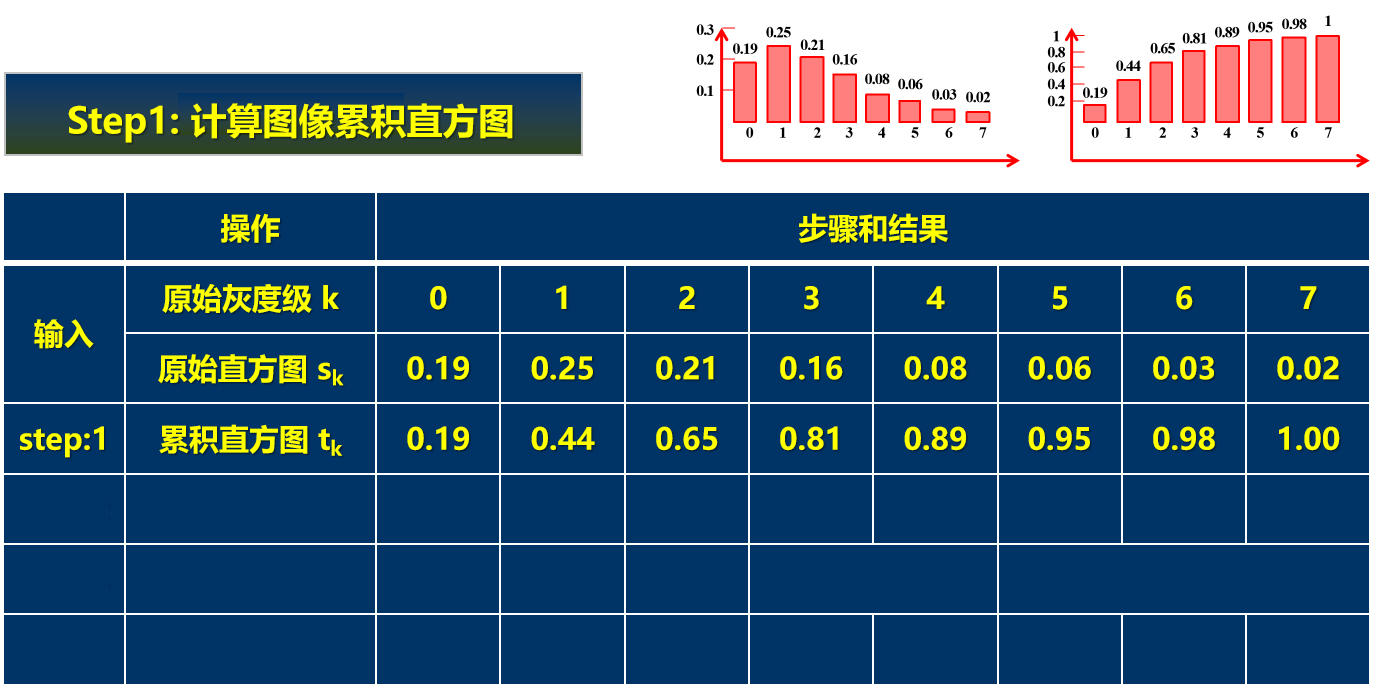
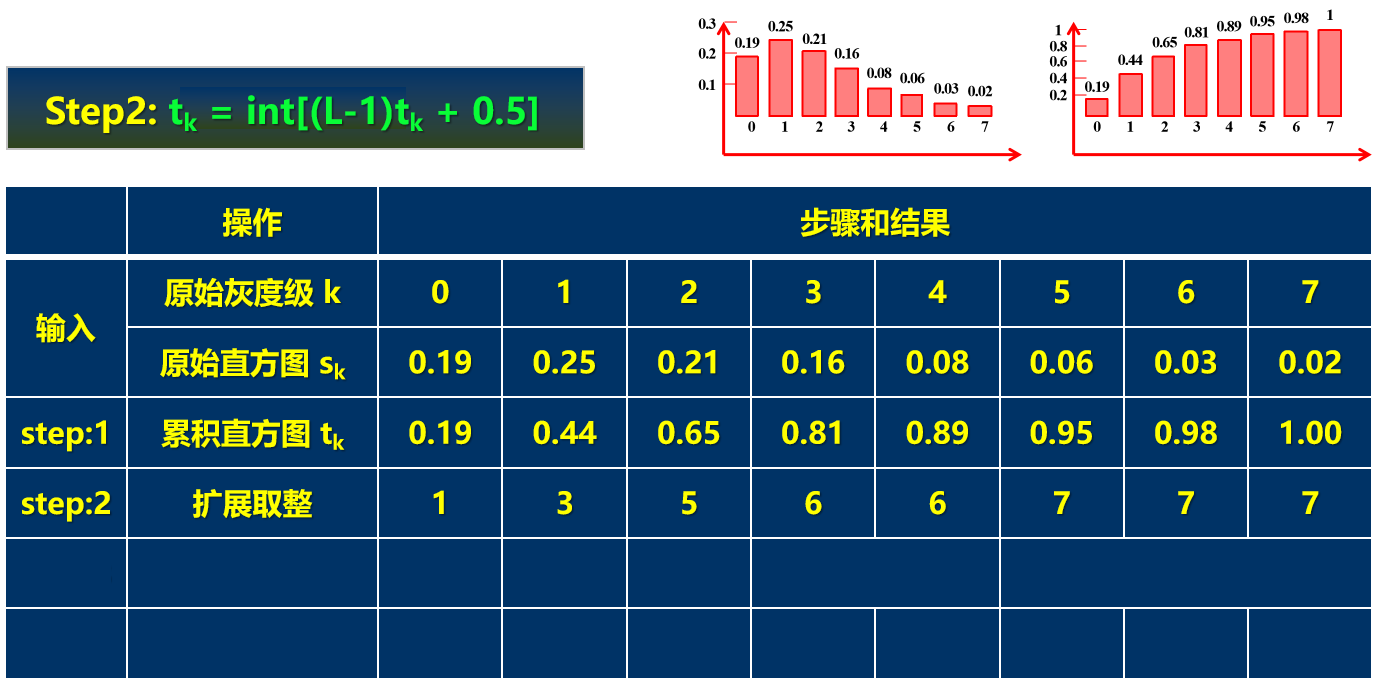
直方图均衡化步骤**
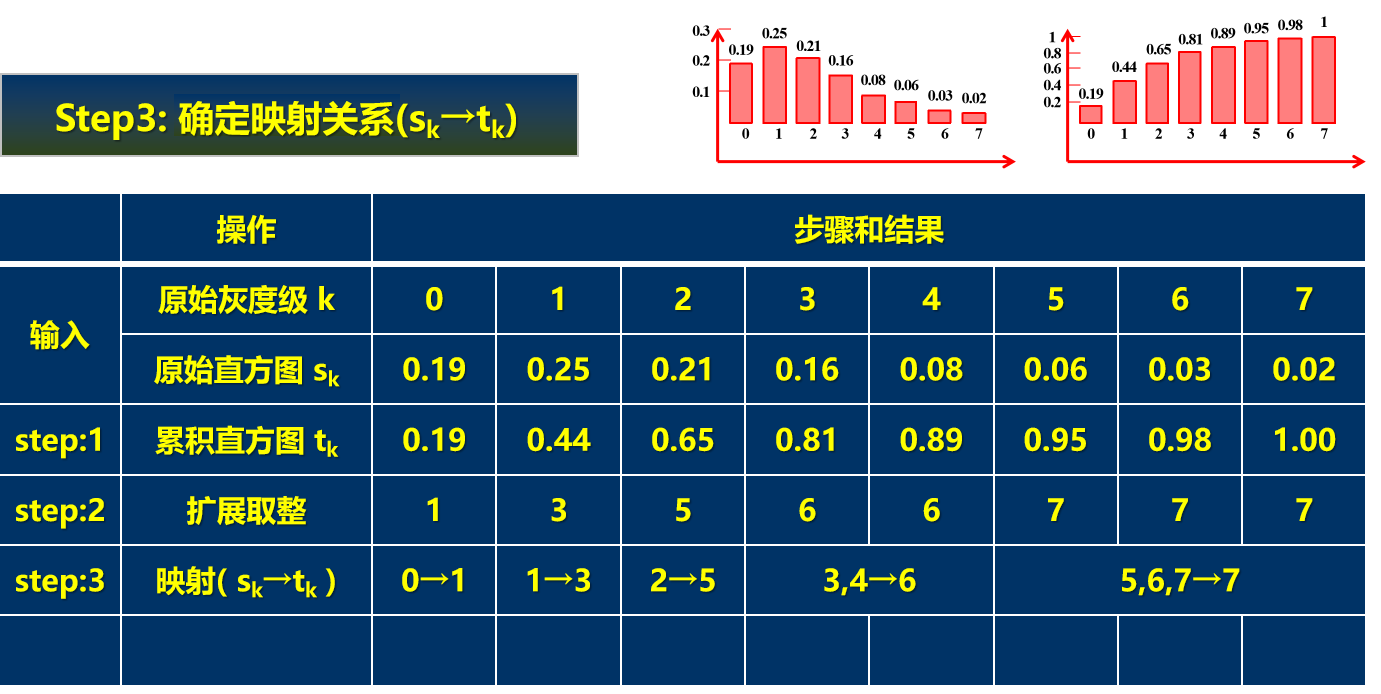
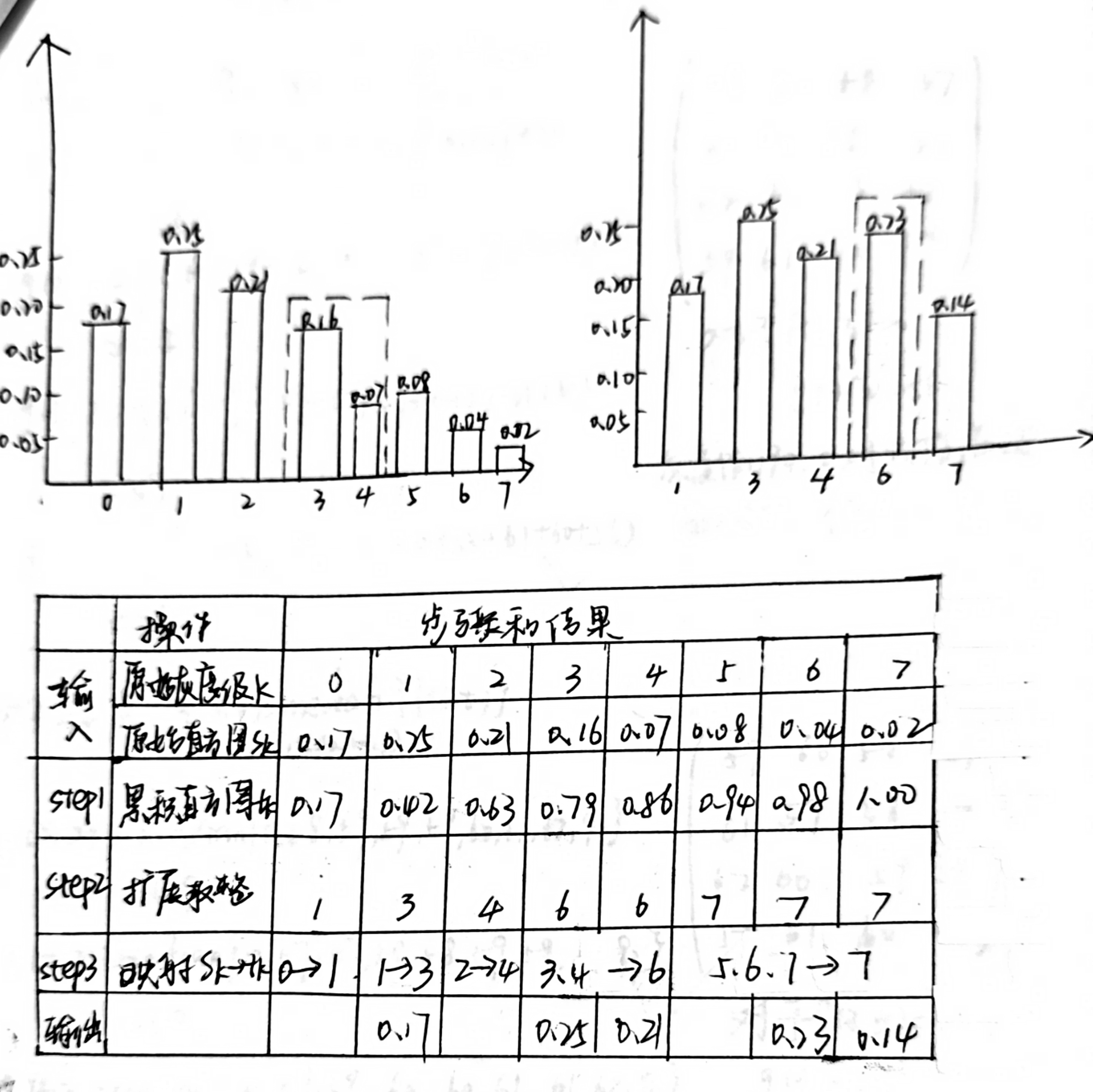
课后题*
一幅灰度级为8的图像对应的归一化直方图为0.17,0.25,0.21,0.16,0.07,0.08,0.04,0.02。用列表法计算直方图均衡化后图像的灰度级和对应的概率,并画出处理前后直方图的对比图
第七讲 图像的噪声抑制
高斯噪声:出现在位置是一定的(每一点上),但噪声的幅值是随机的
椒盐噪声:出现位置是随机的,但噪声的幅值是基本相同的
空域滤波,区域的相关性
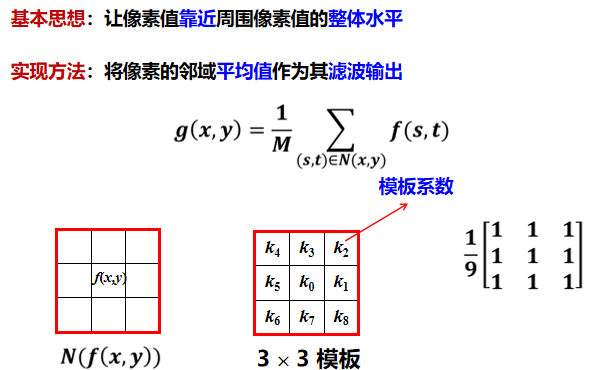
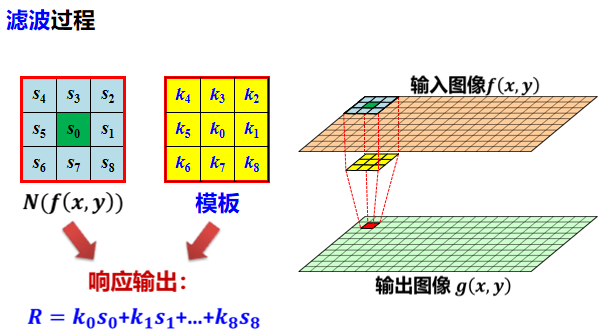
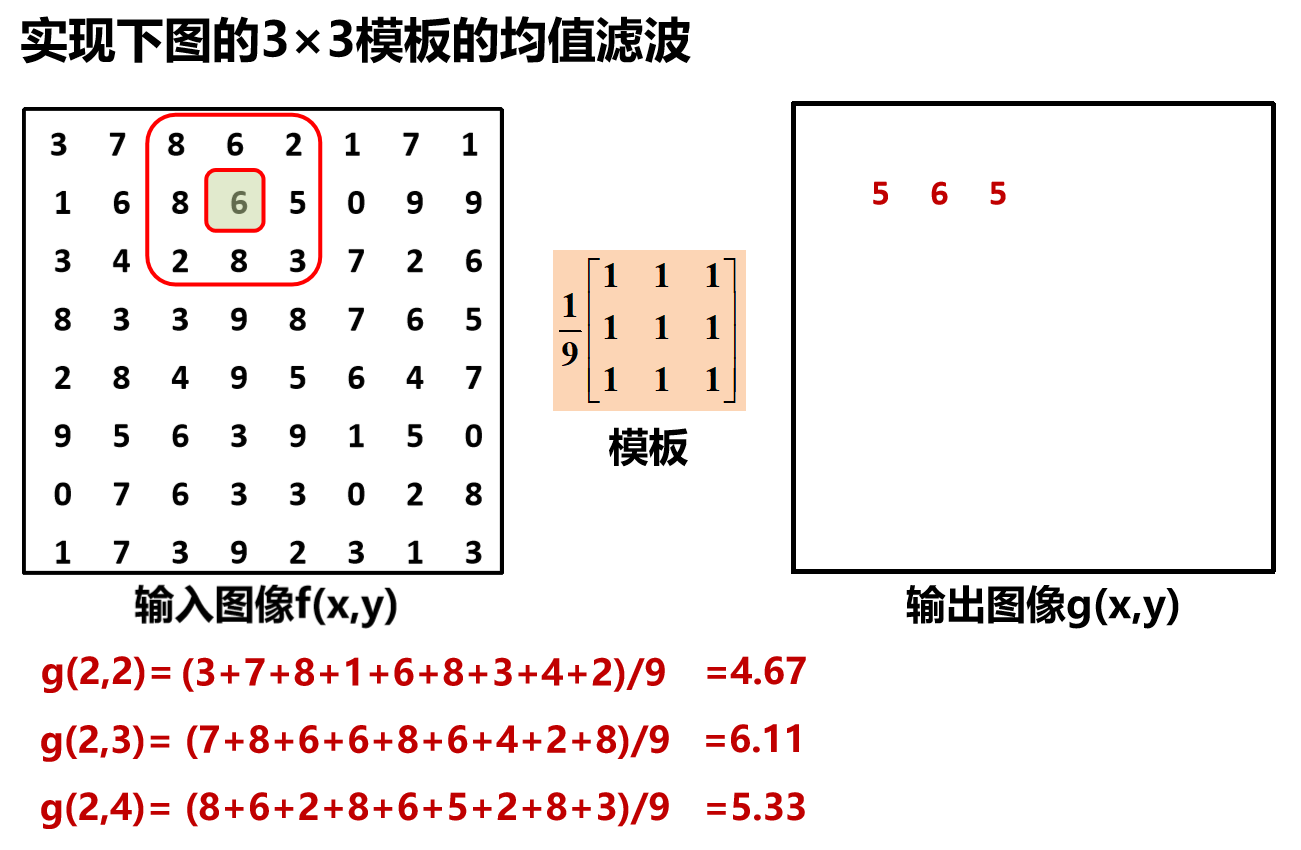
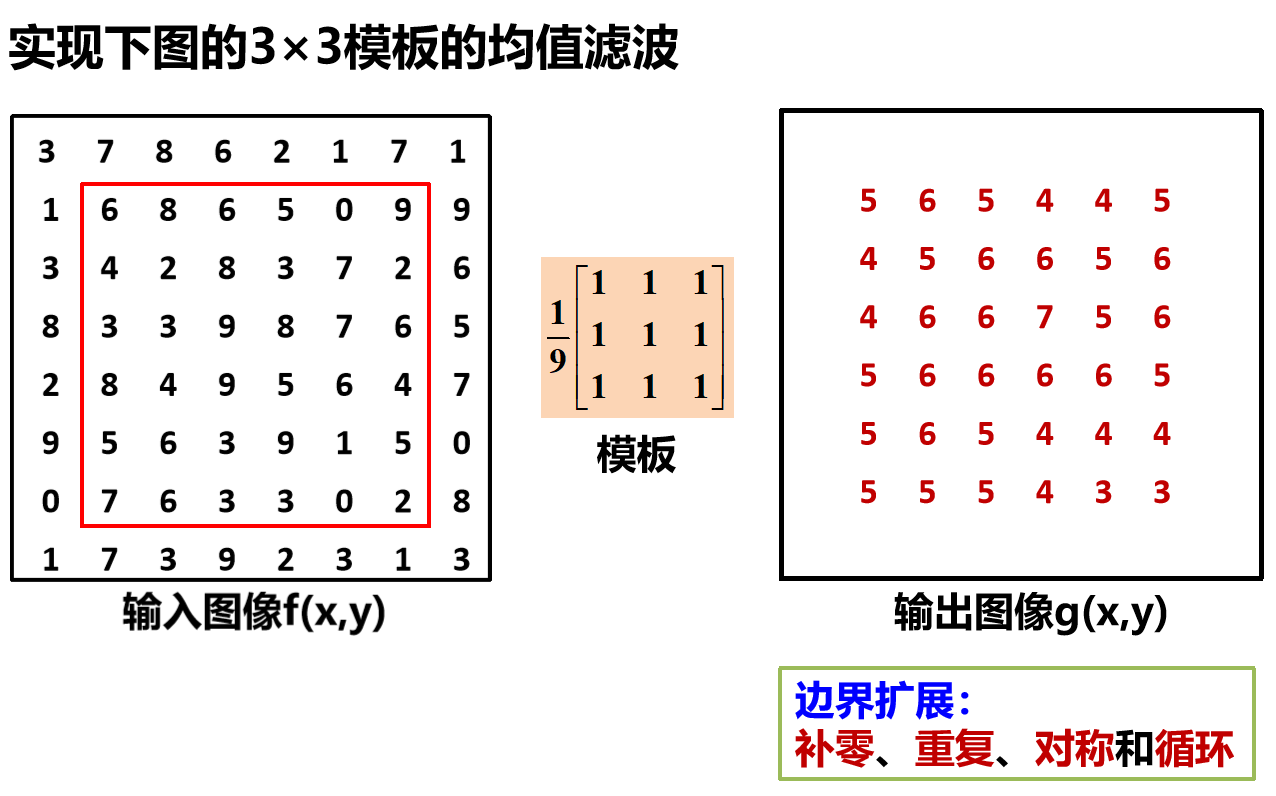
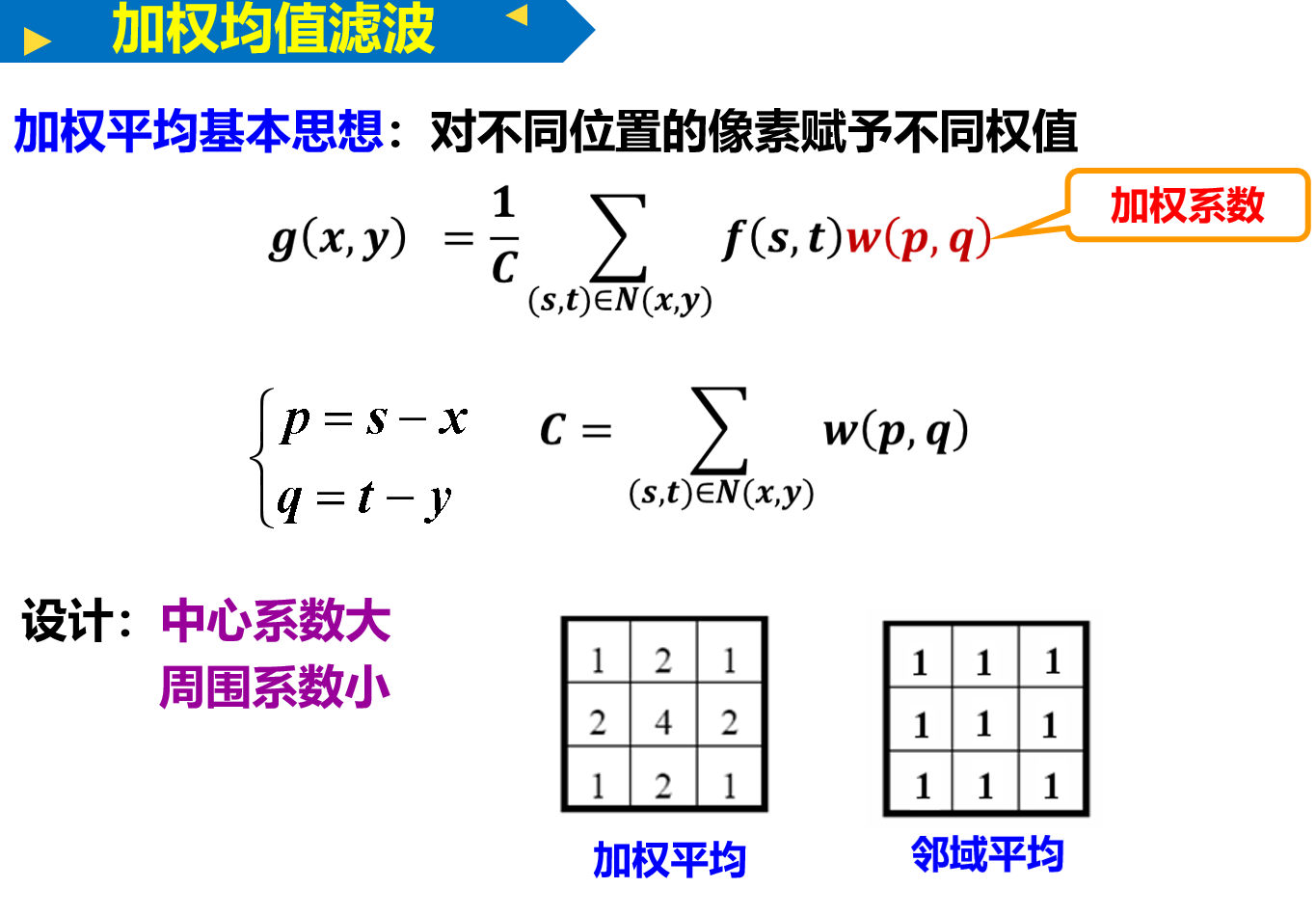
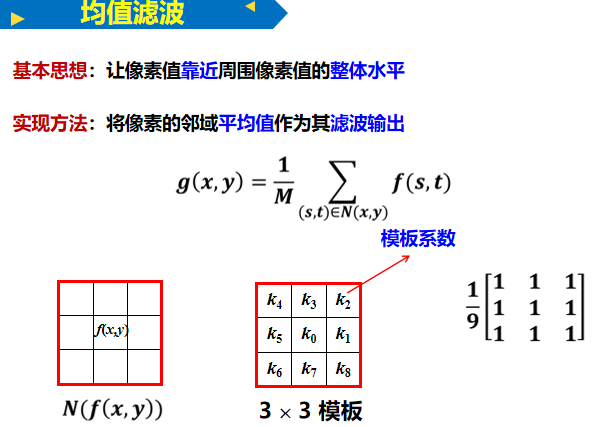
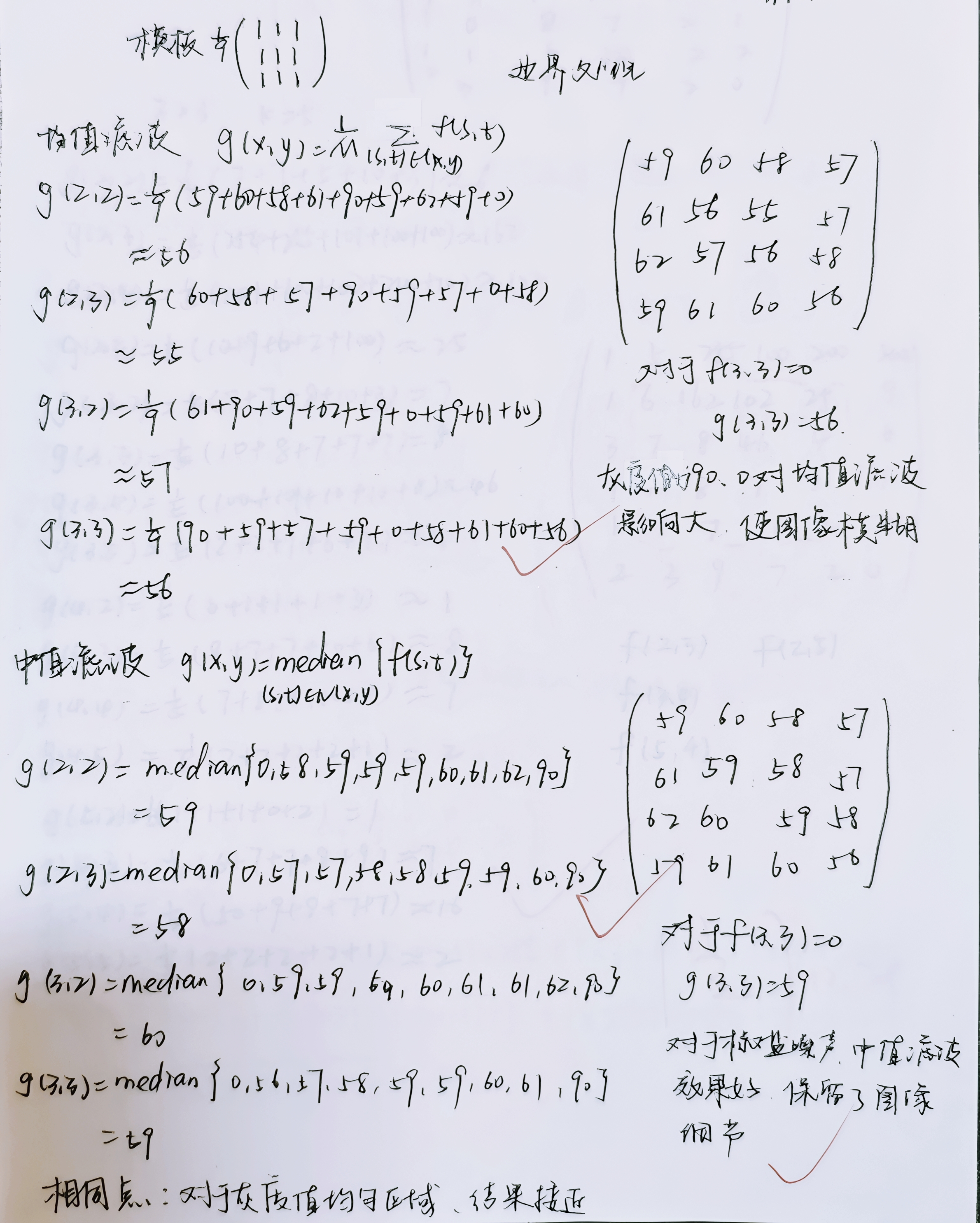
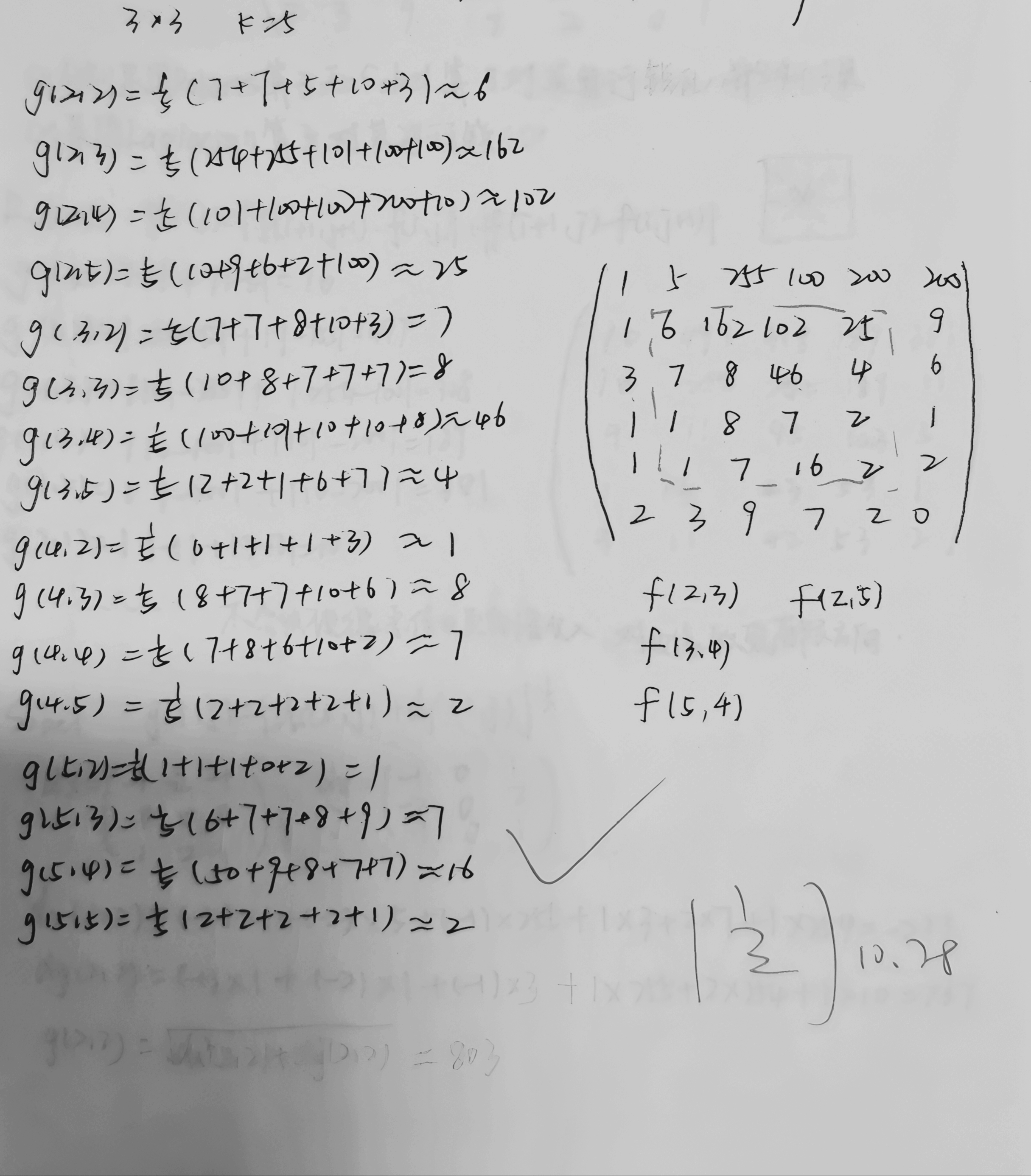
一、均值滤波*
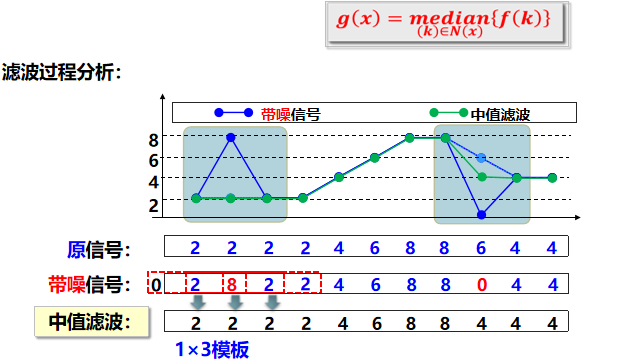
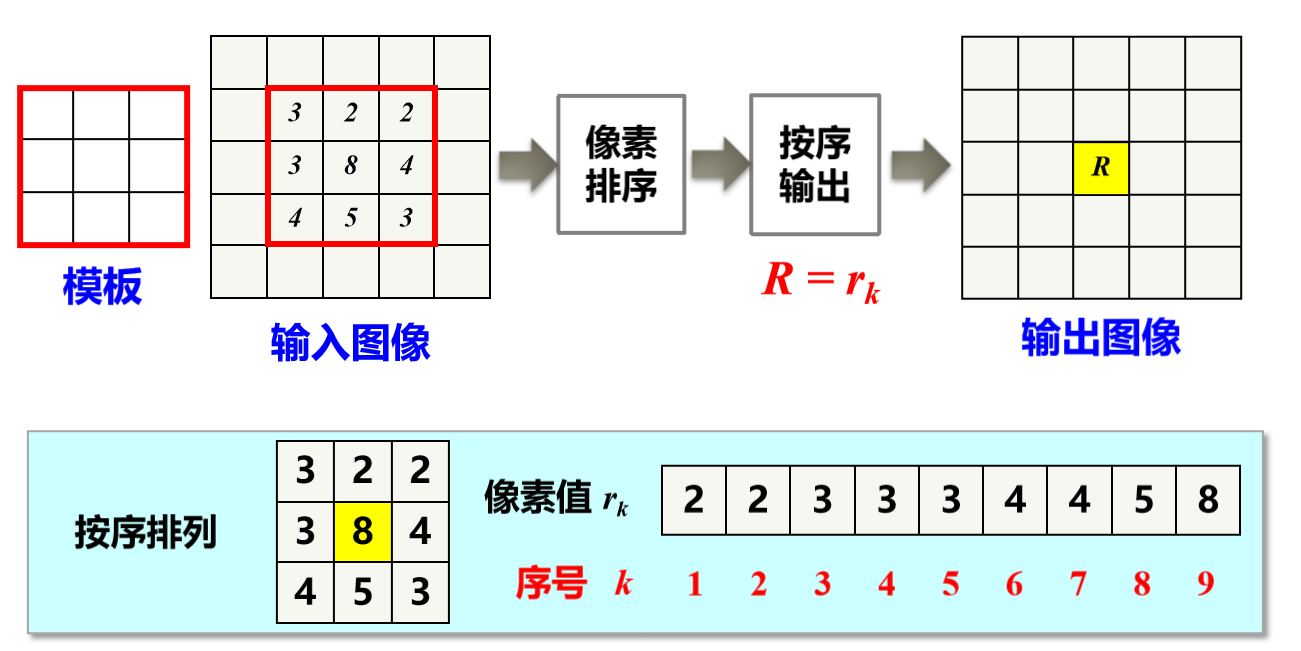
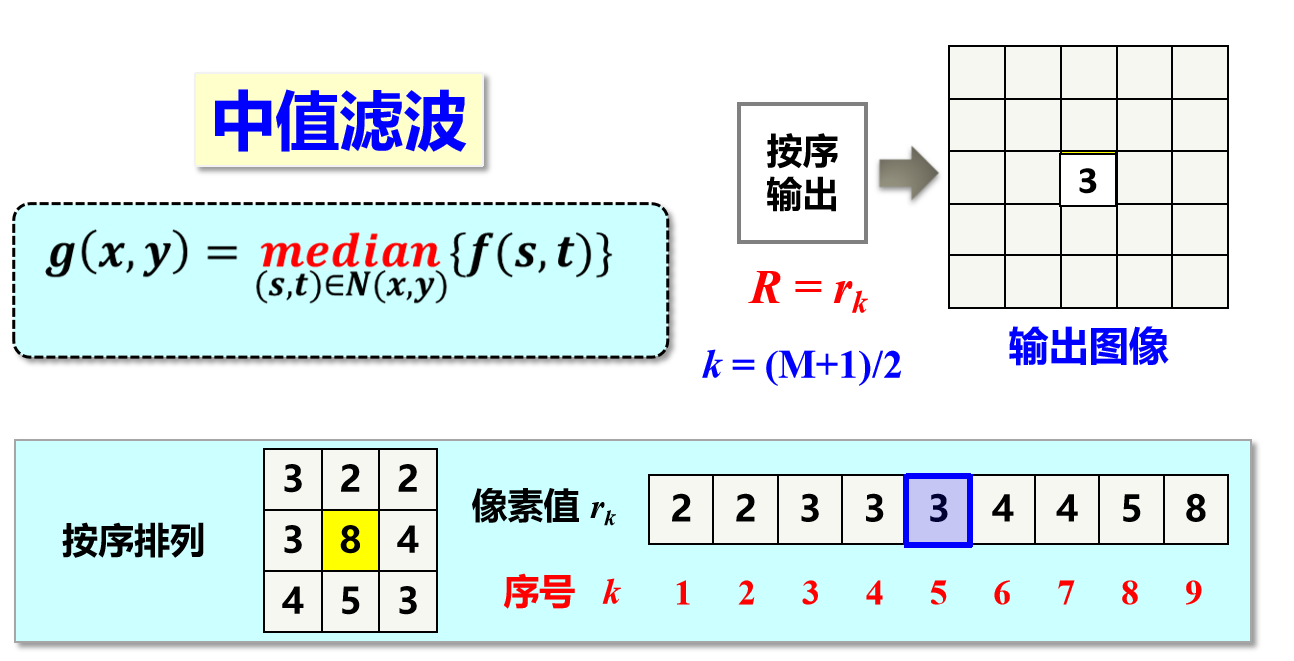
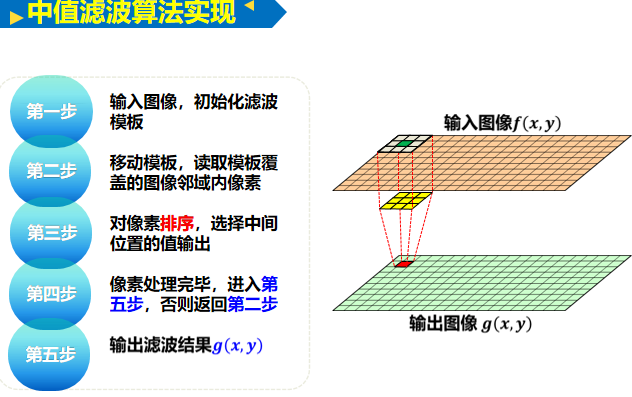
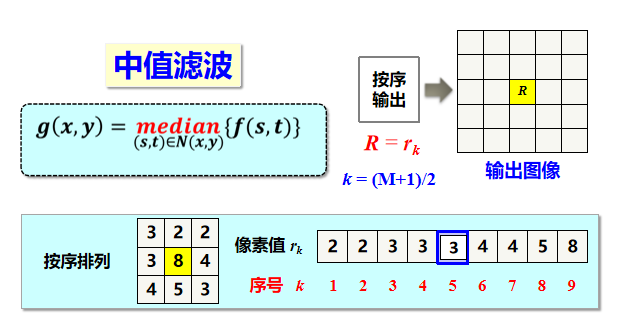
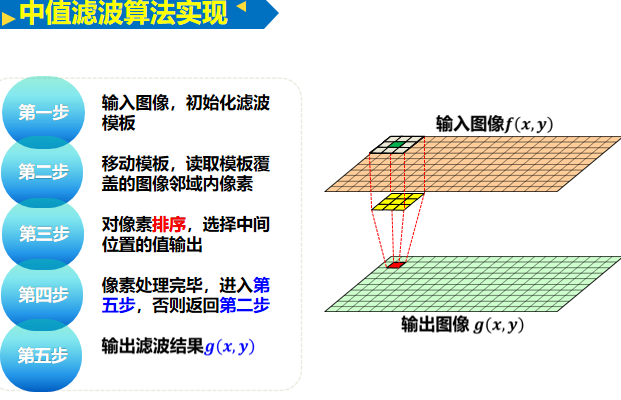
二、中值滤波*
一维中值滤波
二维中值滤波

二者比较
对于椒盐噪声,中值滤波效果比均值滤波效果好
对于高斯噪声,均值滤波效果比中值滤波效果好
课后题*
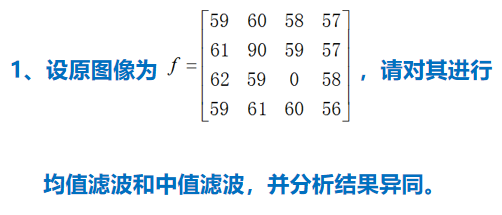
均值滤波
中值滤波
第八讲 图像的锐化处理
基于模版的操作

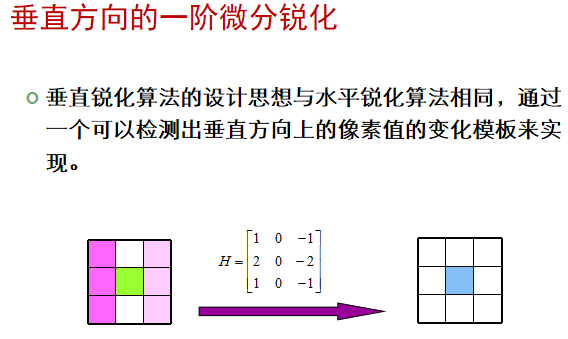
一、一阶微分算子*
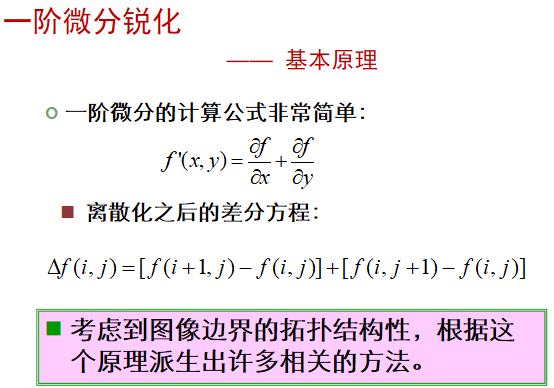
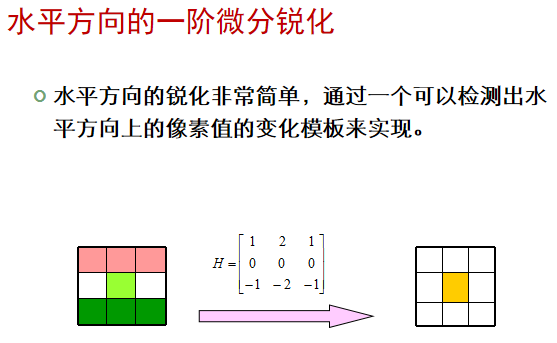
(1)单方向的一阶微分锐化
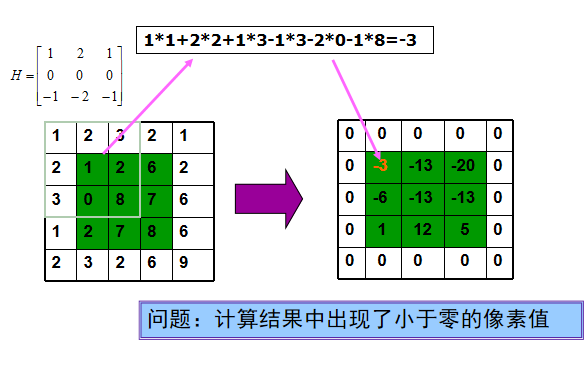
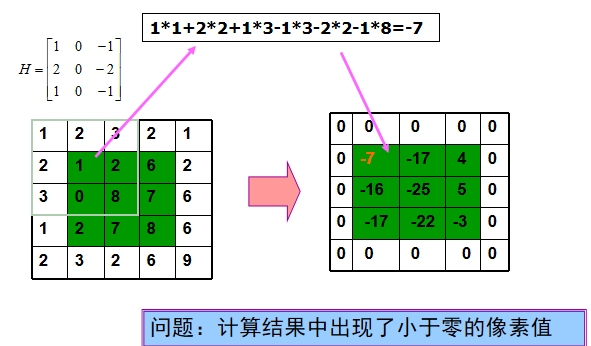
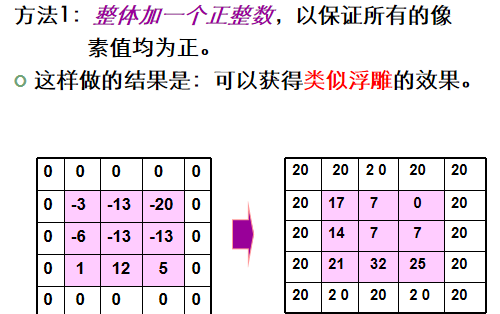
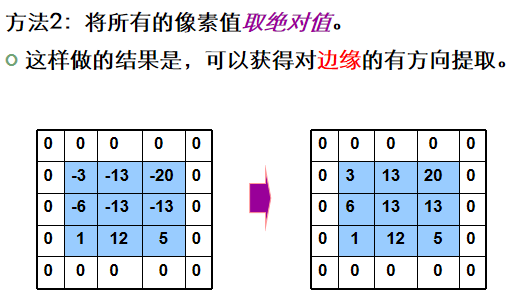
后处理(整体加一个正整数、取绝对值)*
(2)无方向的一阶微分锐化*
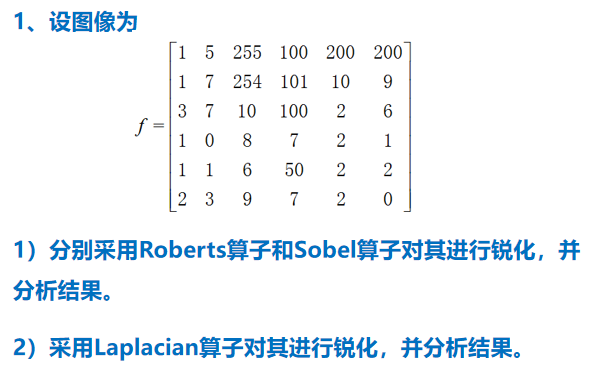
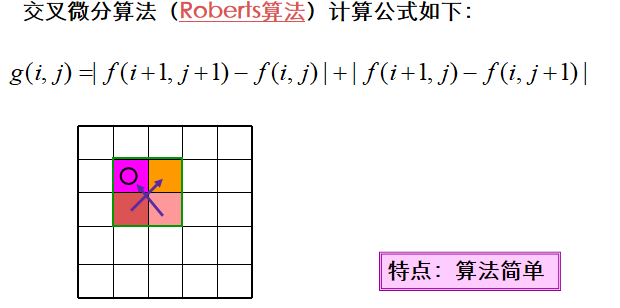
交叉微分算法(Roberts算法)
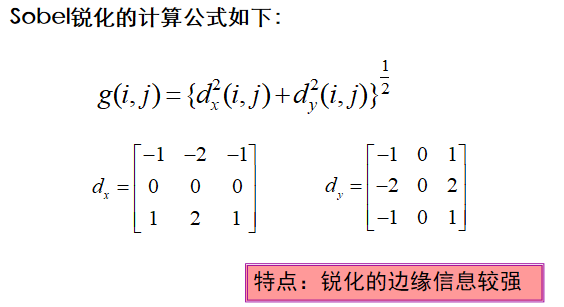
Sobel锐化**
Sobel算子获得的边界是比较粗略的边界,反映的边界信息较少,但是所反映的边界比较清晰

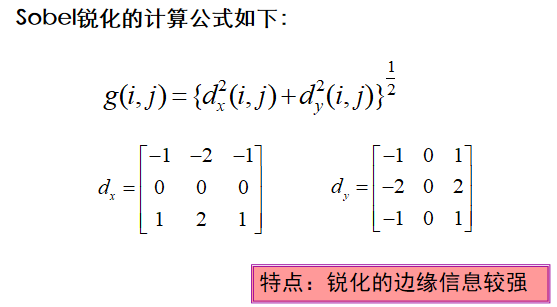
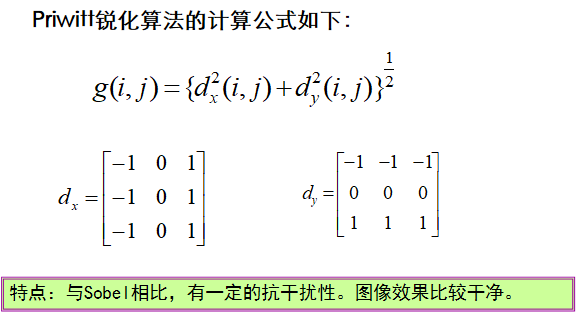
Sobel与Priwitt模版相似,权值不同
Priwitt锐化
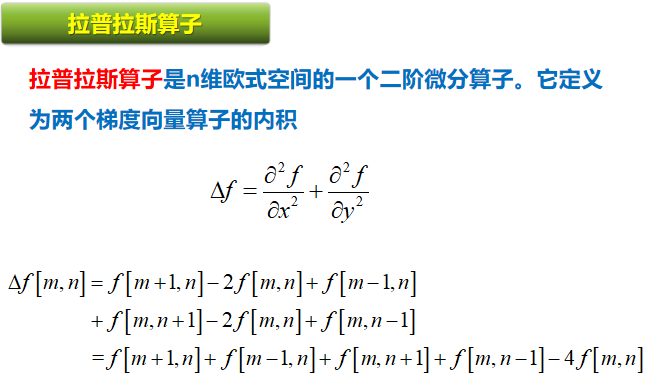
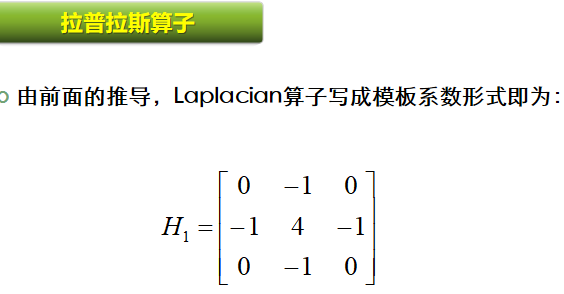
二、二阶微分算子*

课后题*
|右下-左上|+|左下-右上|
第九讲 图像分割
一、图像分割的基本概念
图像分割的目的*
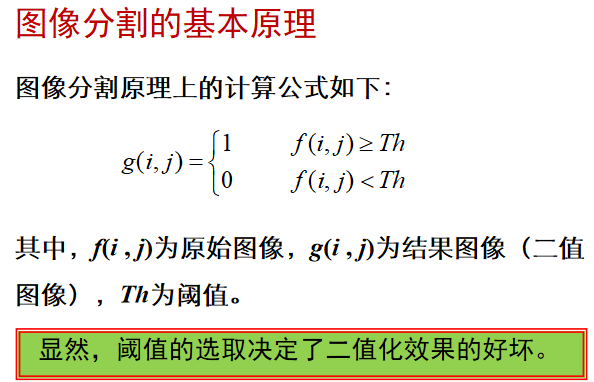
图像分割原理、计算公式
二、图像分割基本方法
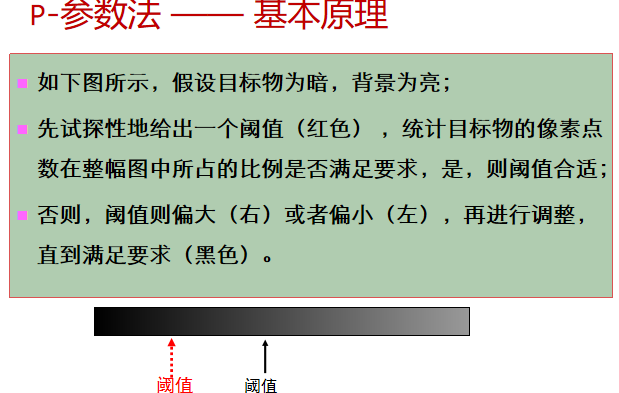
p-参数法(了解)
1)设图像的大小为m×n,计算得到原图的灰度直方图h;
2)输入目标物所占画面的比例p;
3)尝试性地给定一个阈值Th=Th0;
4)计算在Th下判定的目标物的像素点数N;
5)判断ps=N/(m × n)是否接近p?
是,则输出结果;
否则,Th=Th+dT;
(if ps<p, 则dT>0;else dT<0),
转4),直到满足条件
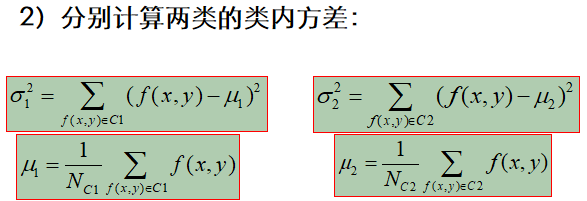
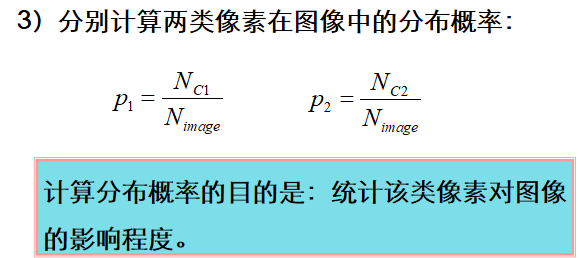
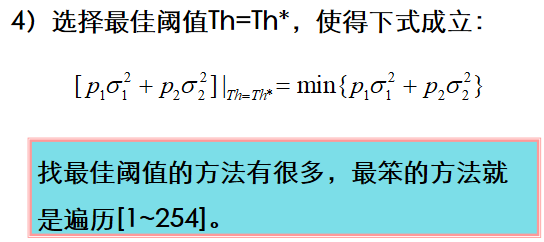
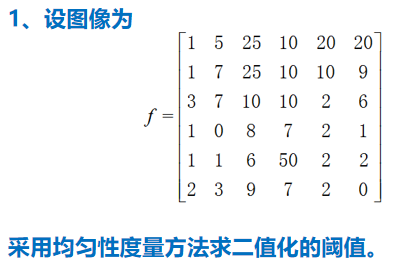
均匀性度量法**

算法步骤*
聚类方法
课后题*
第十讲 二值图像的分析
二值图像分析
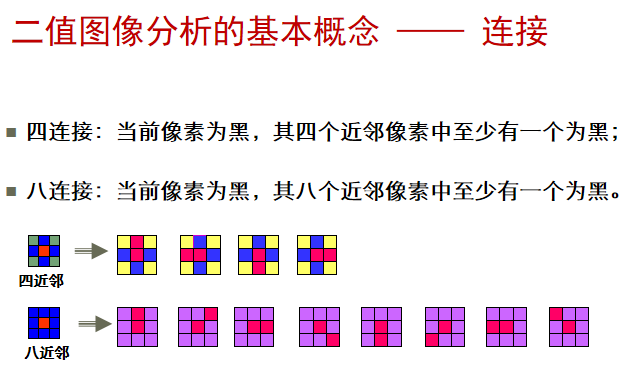
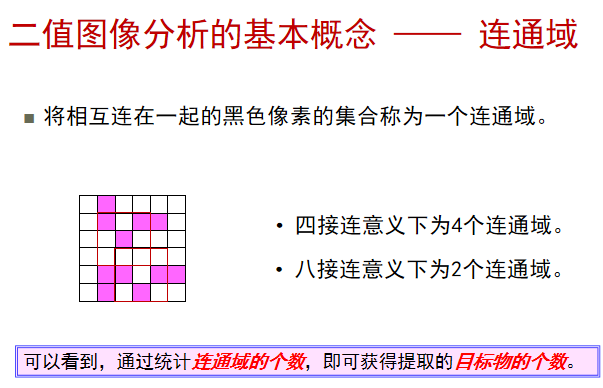
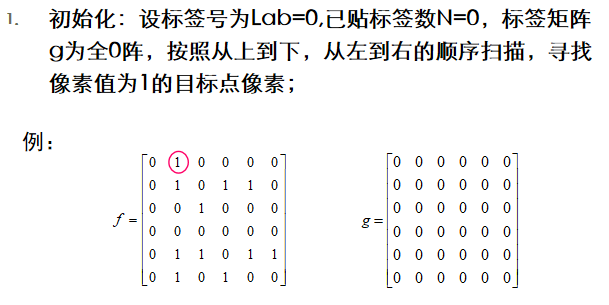
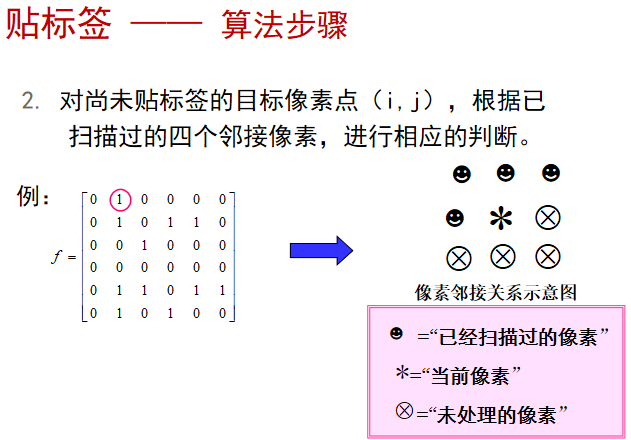
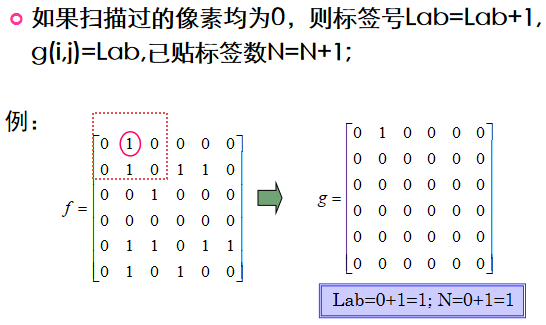
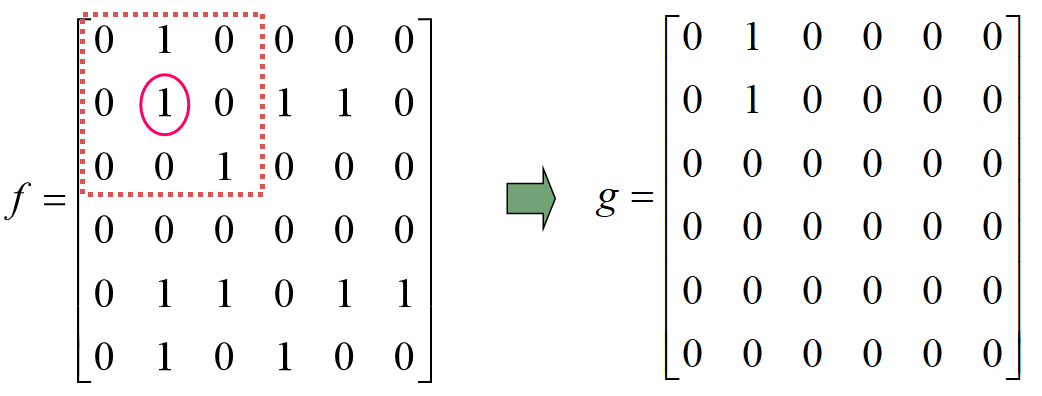
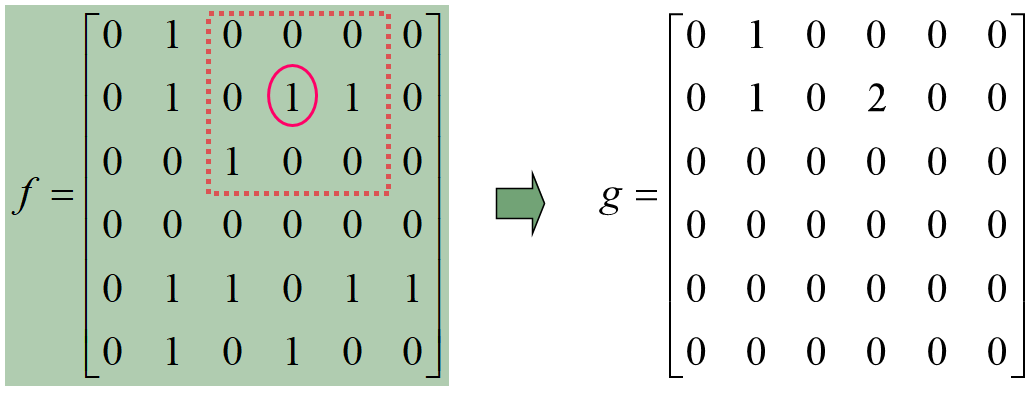
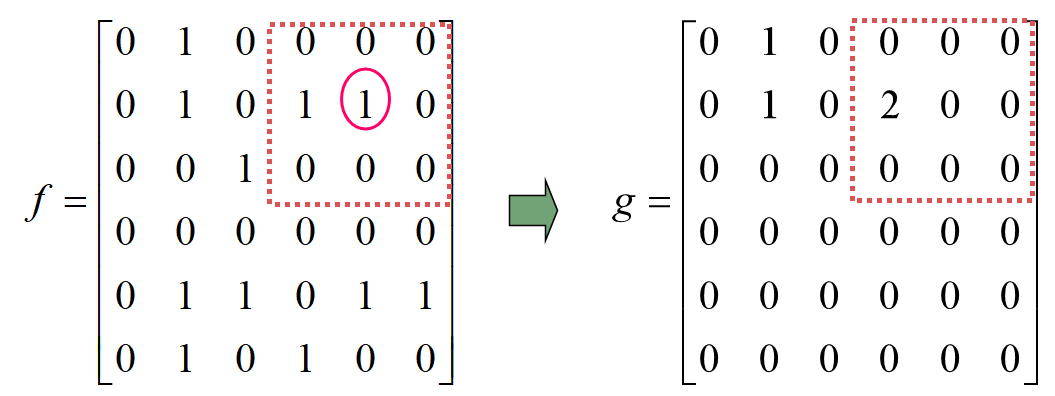
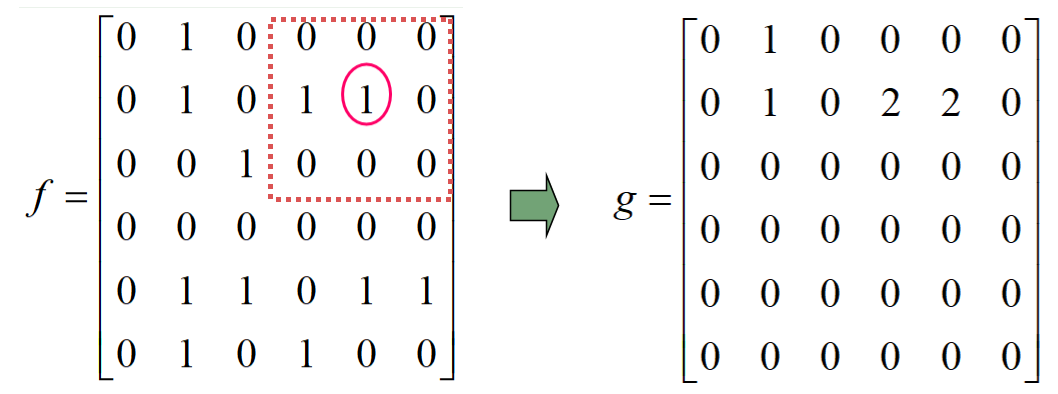
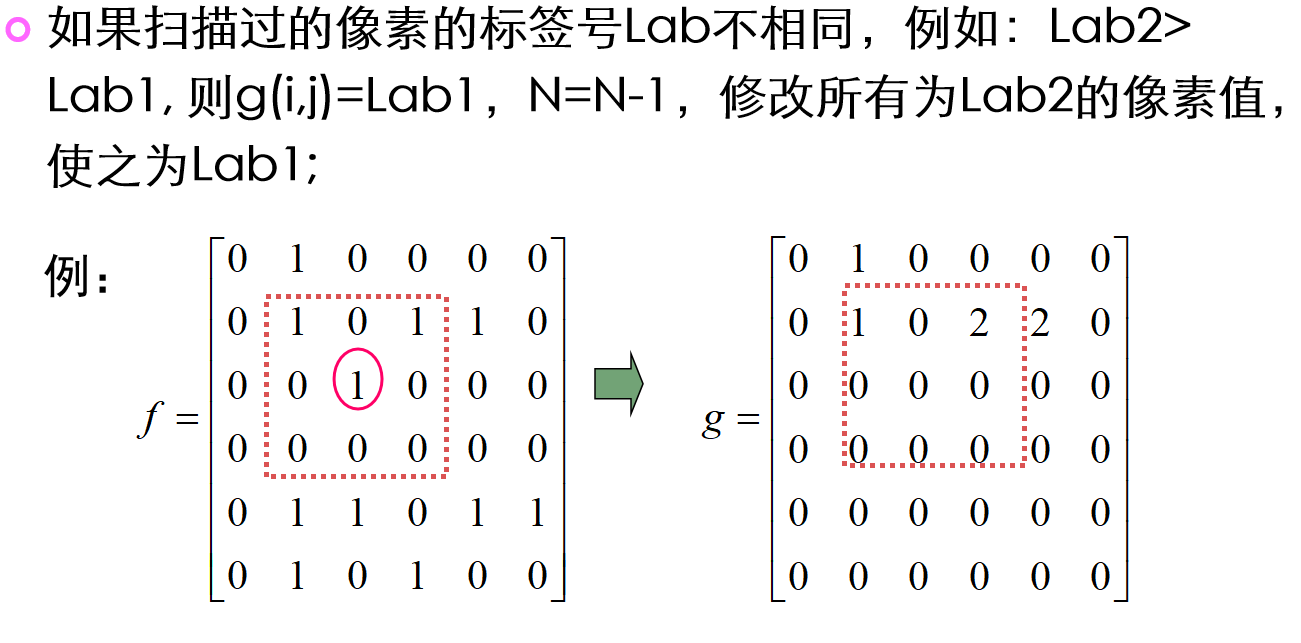
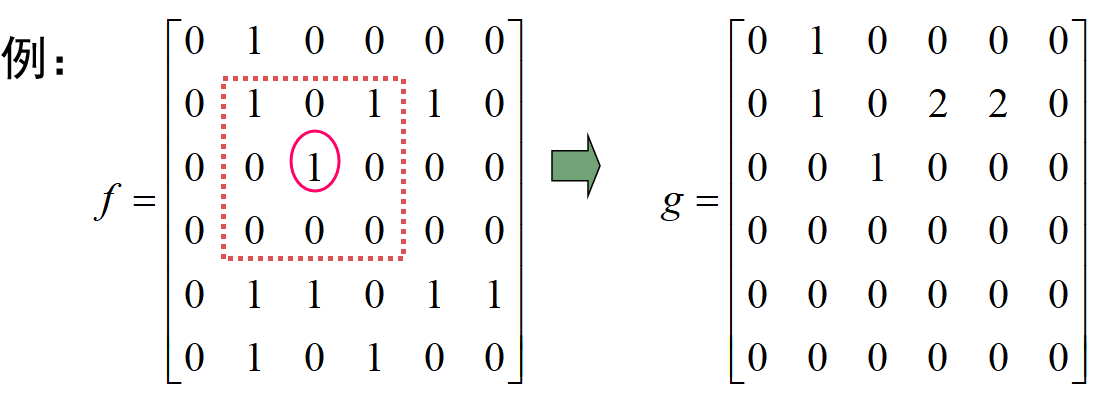
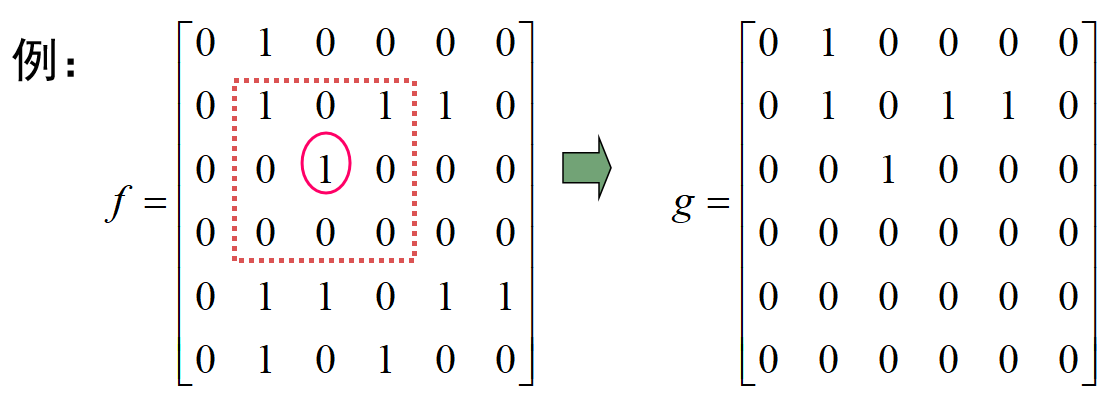
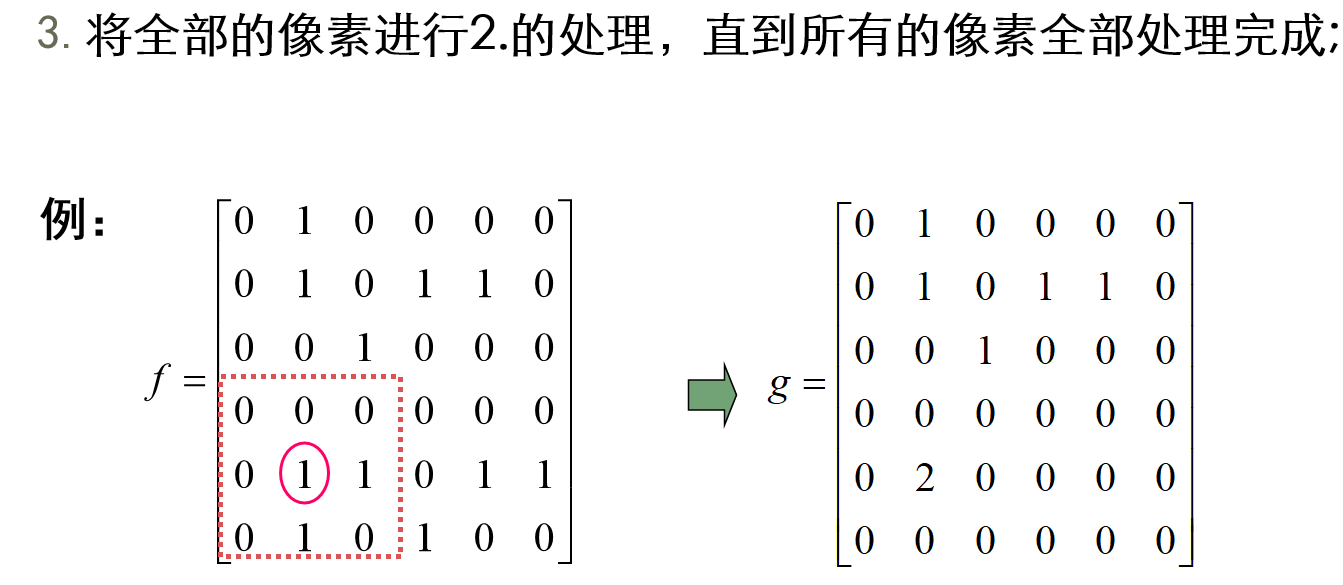
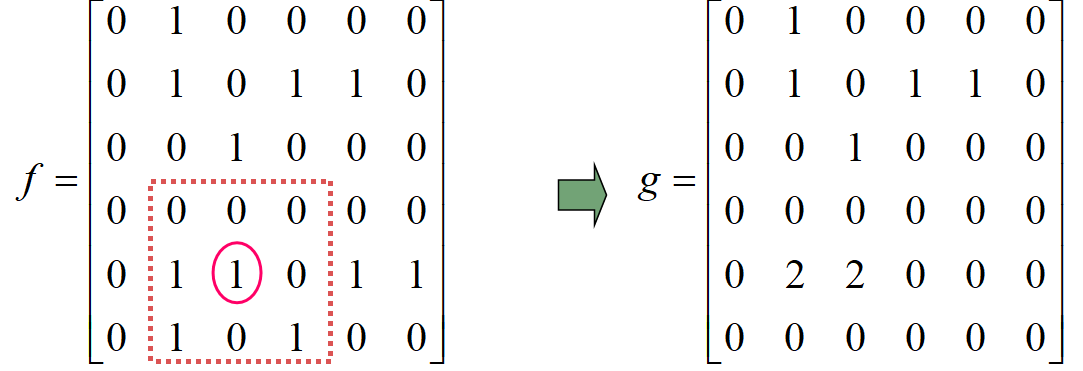
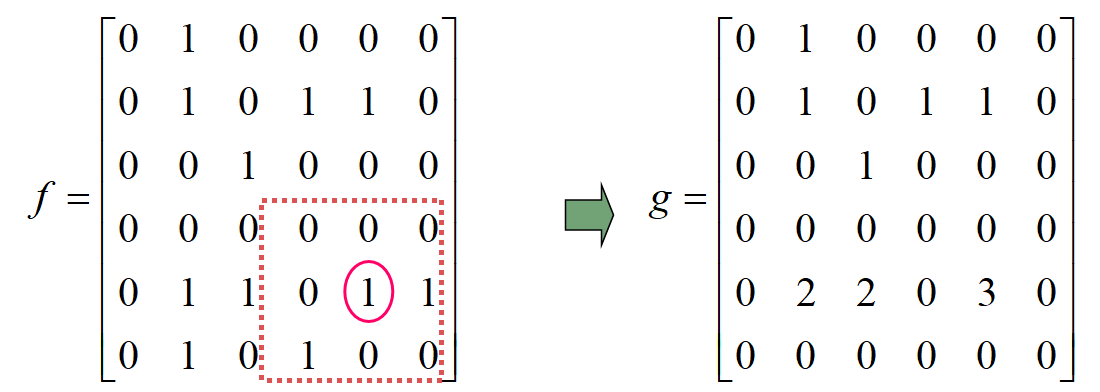
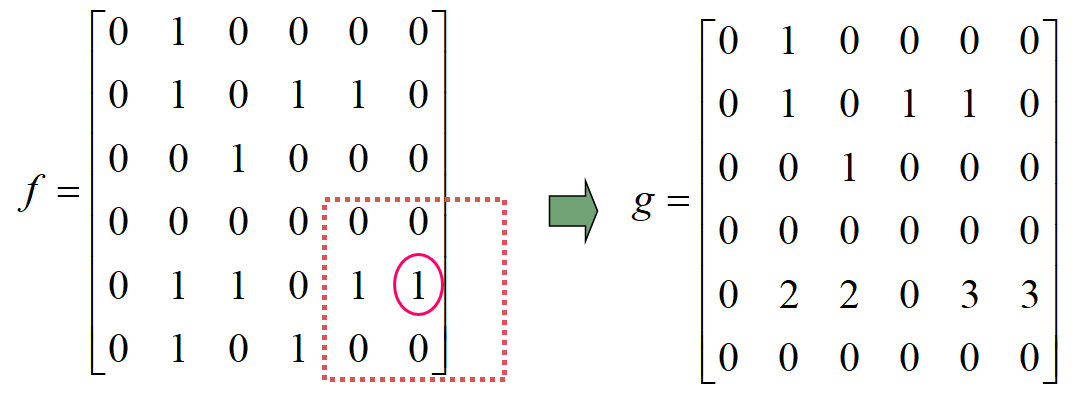
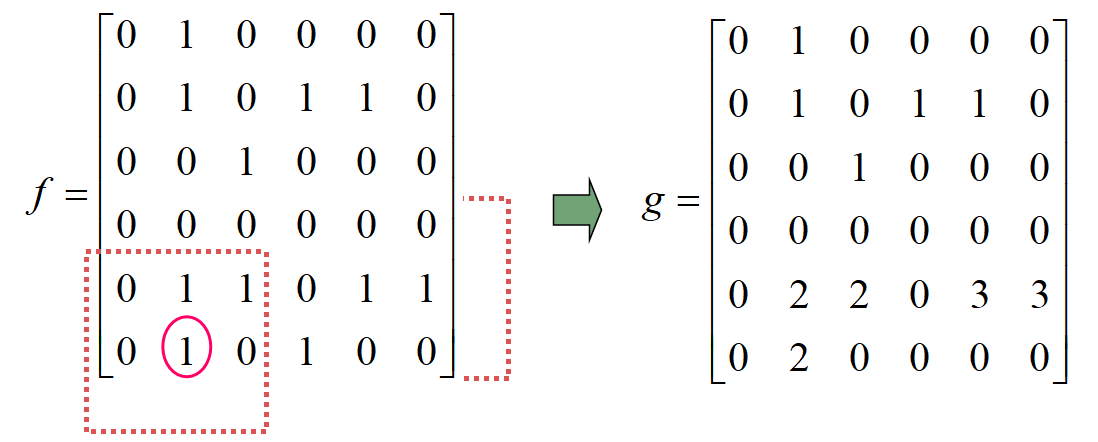
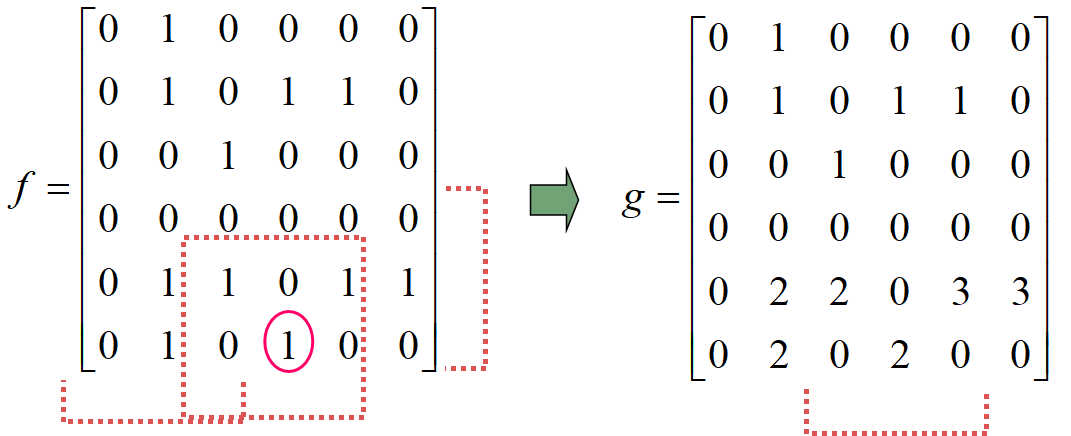
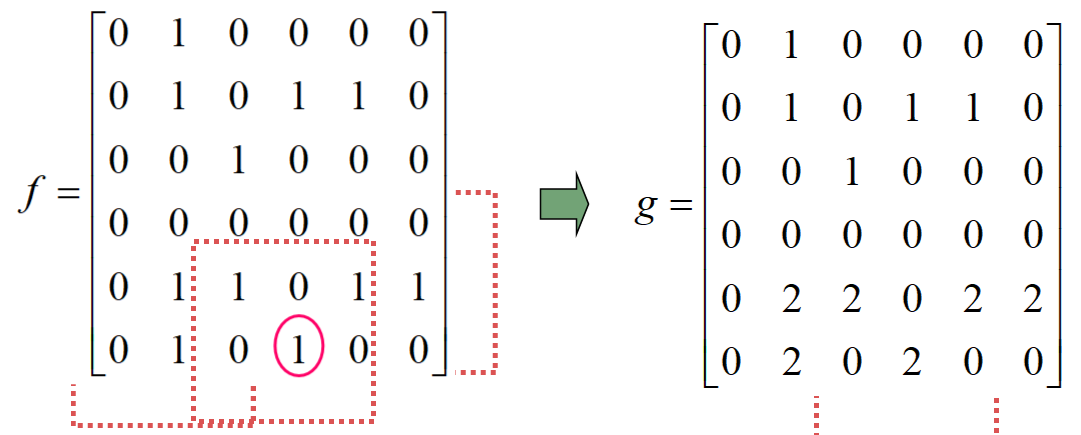
一、贴标签法**
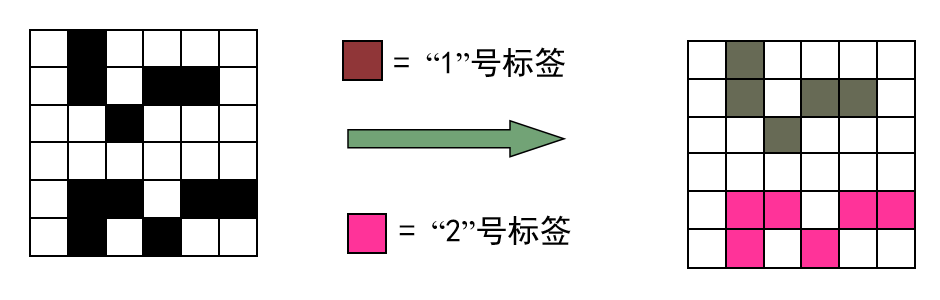
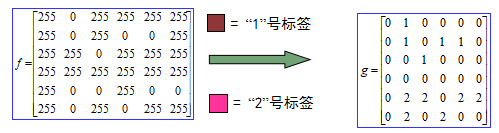
算法步骤*



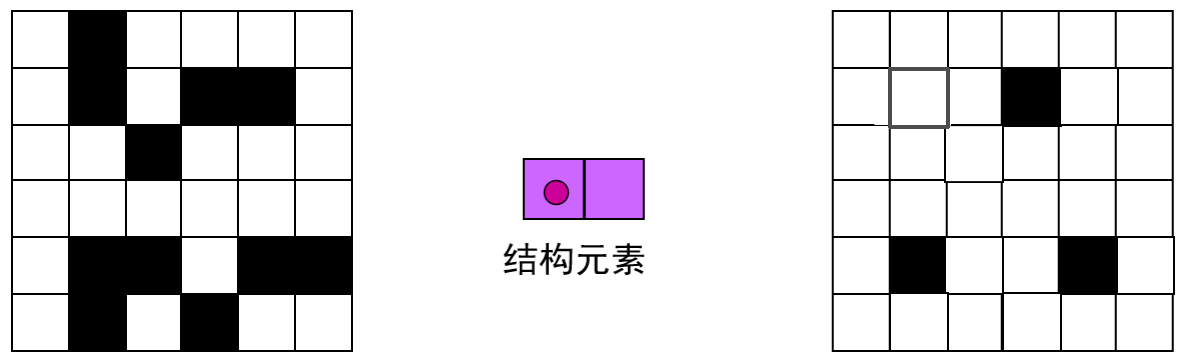
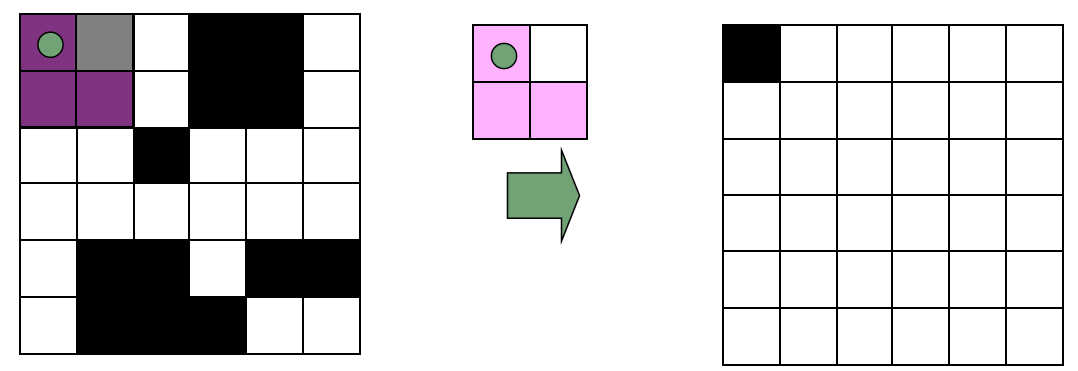
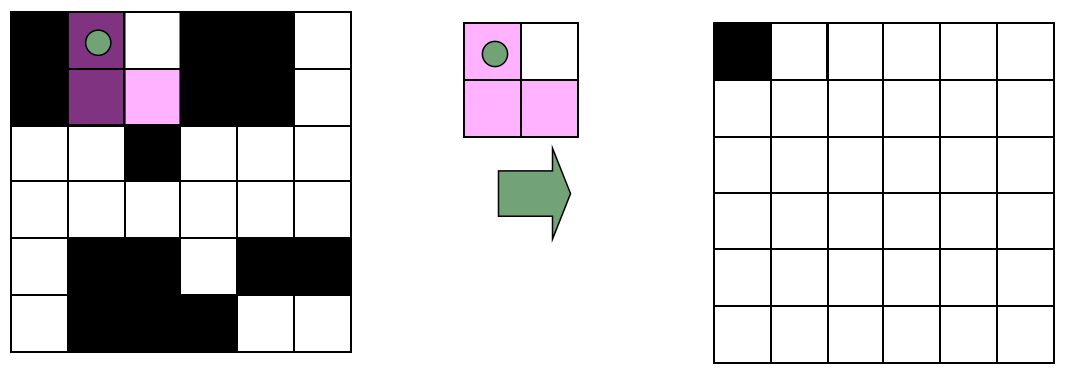
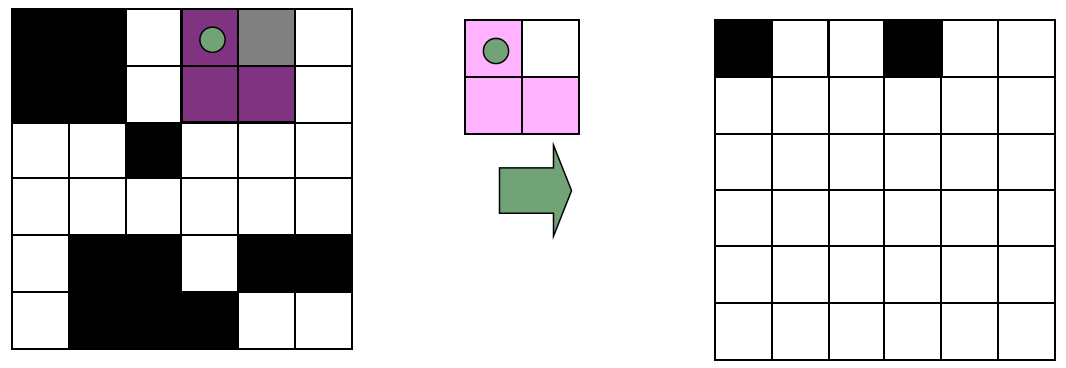
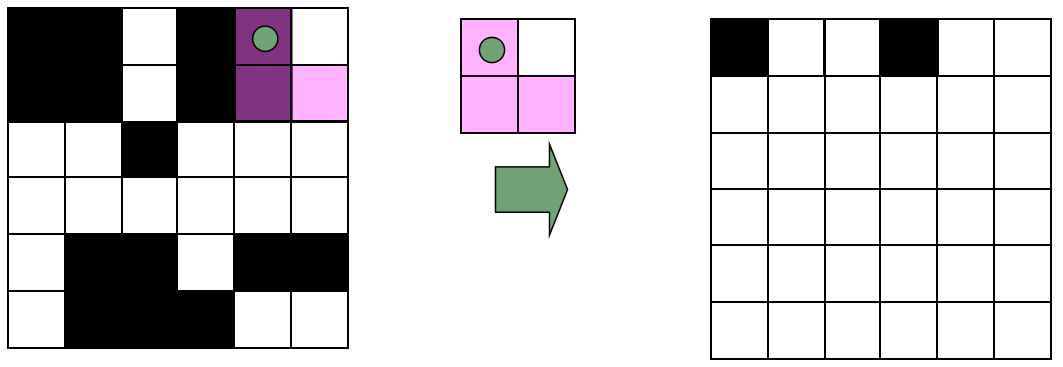
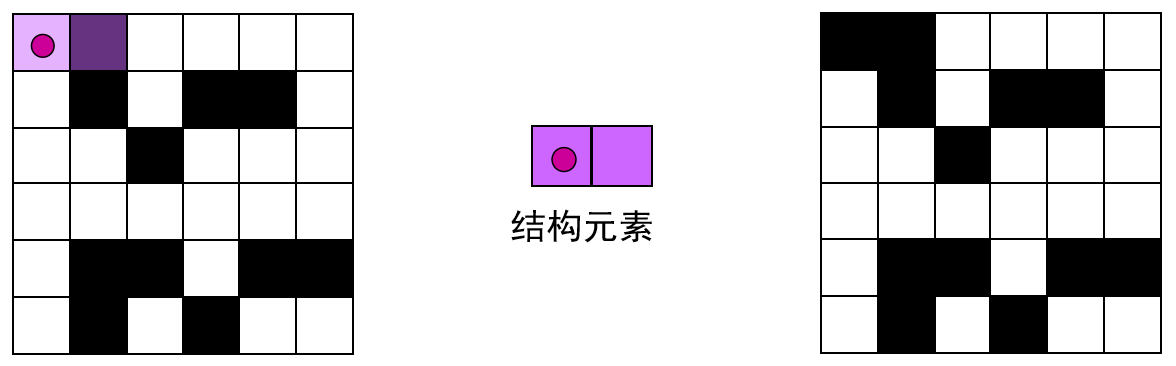
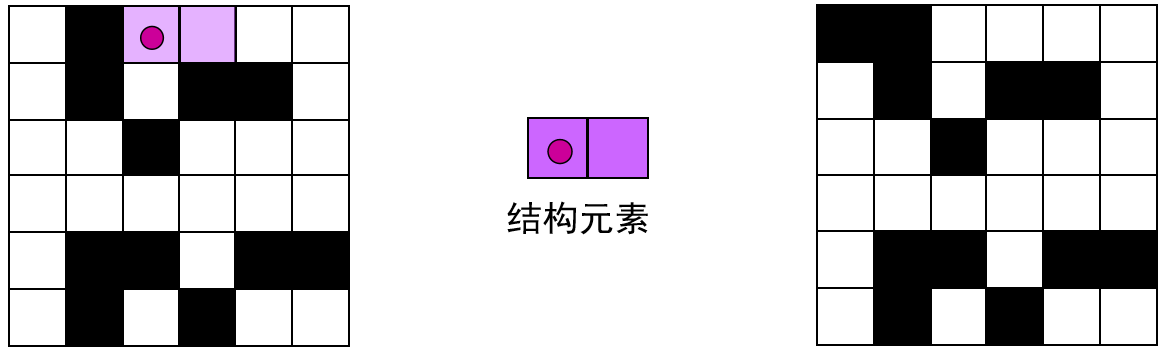
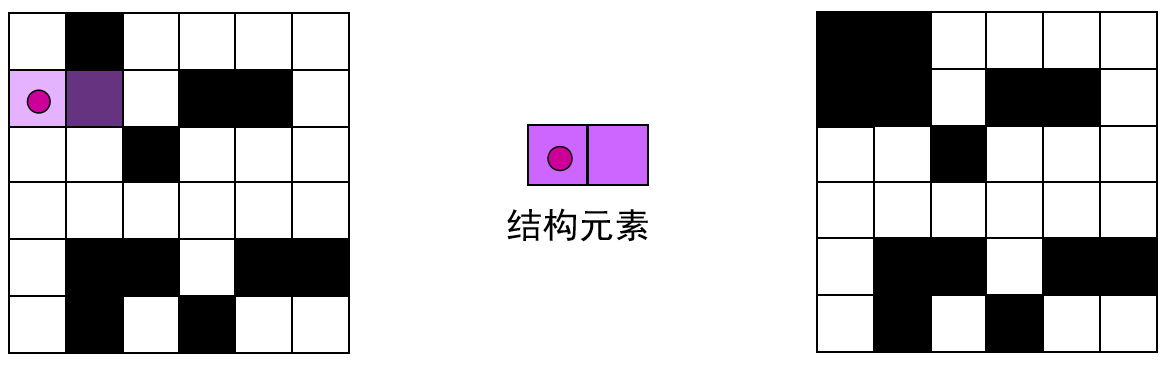
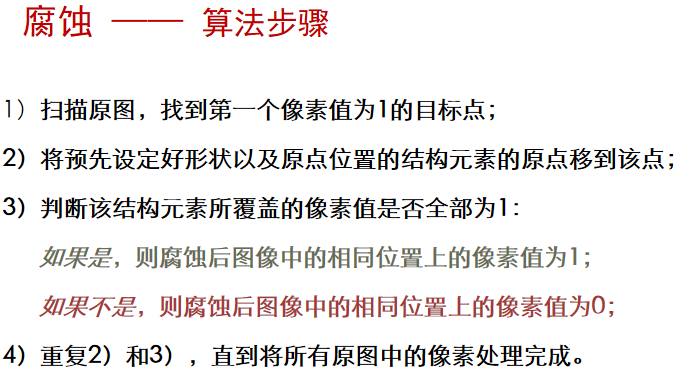
二、腐蚀*
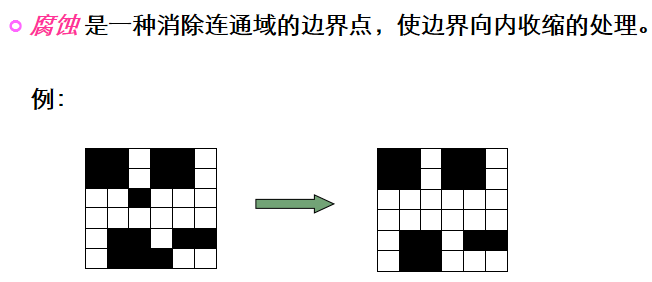

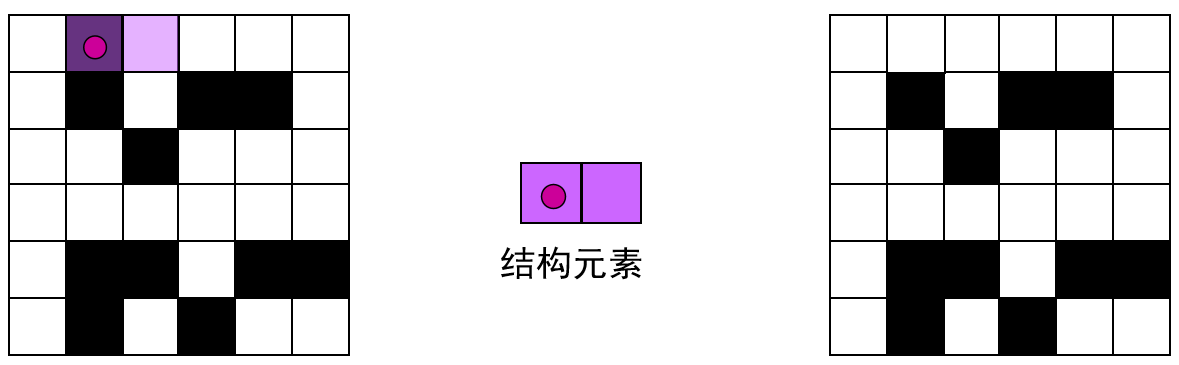
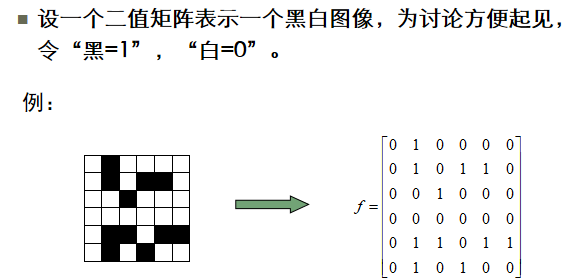
"黑=1","白=0" 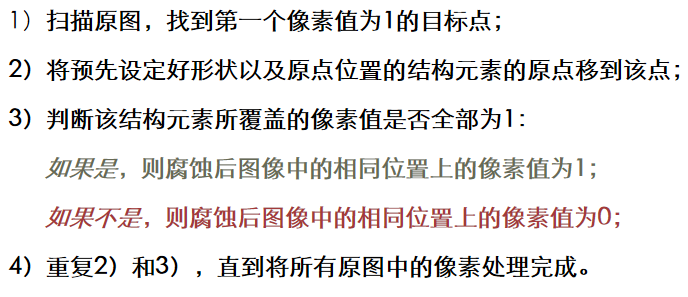
注:图像画面上边框处不能被结构元素覆盖的部分可以保持原来的值不变,也可以置为背景
.........
腐蚀处理可以将粘连在一起的不同目标物 分离,并可以将小的颗粒噪声去除
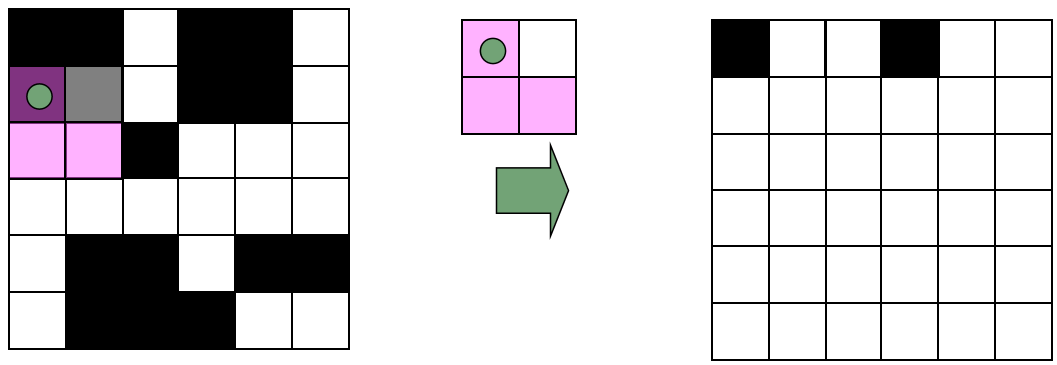
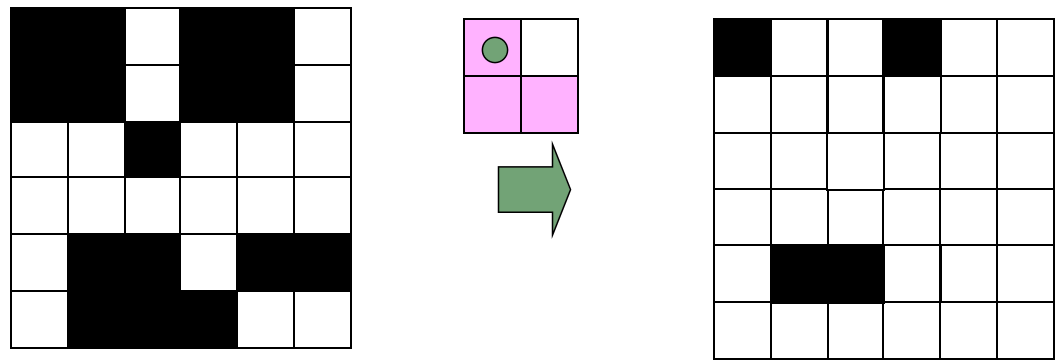
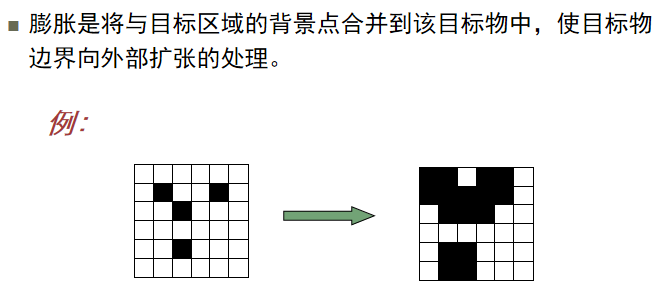
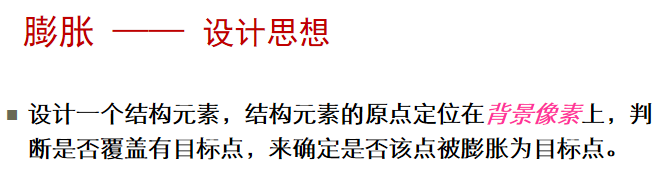
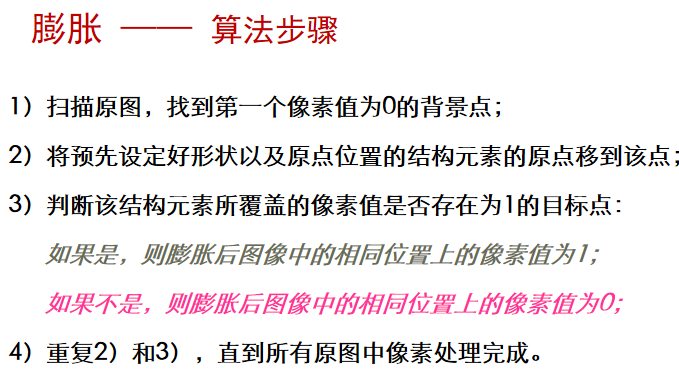
三、膨胀*
.........
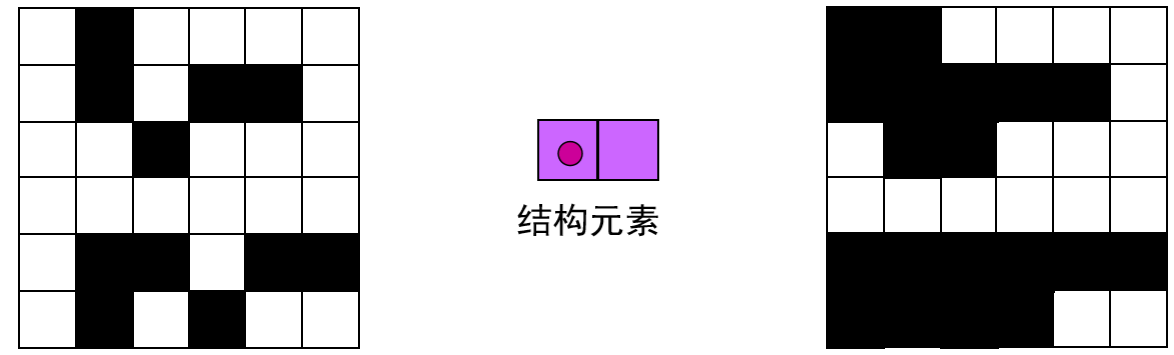
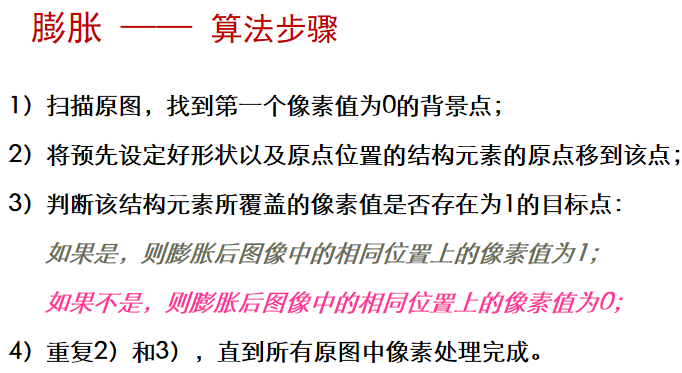

........

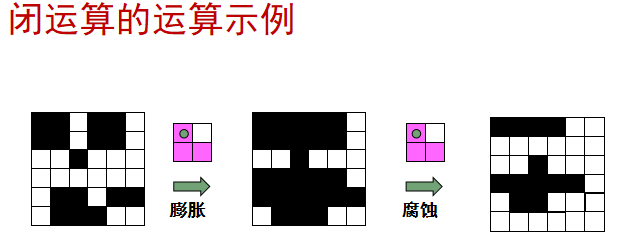
膨胀处理可以将断裂开的目标物进行合 并,便于对其整体的提取
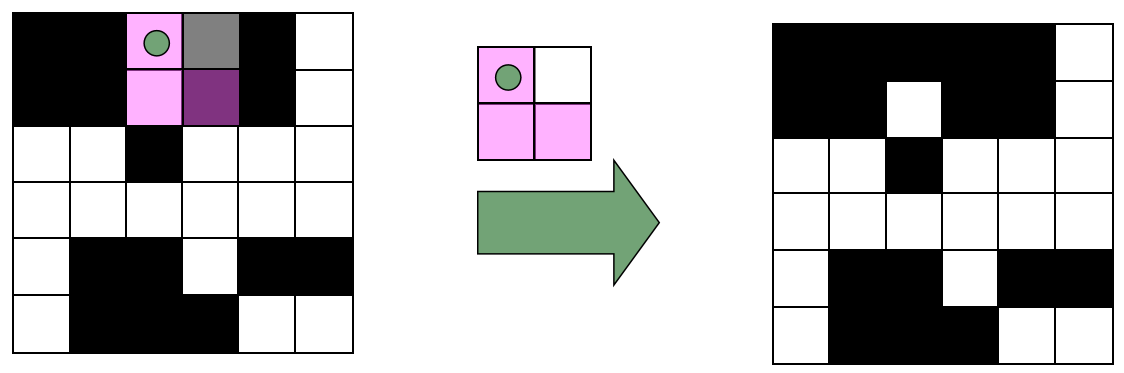
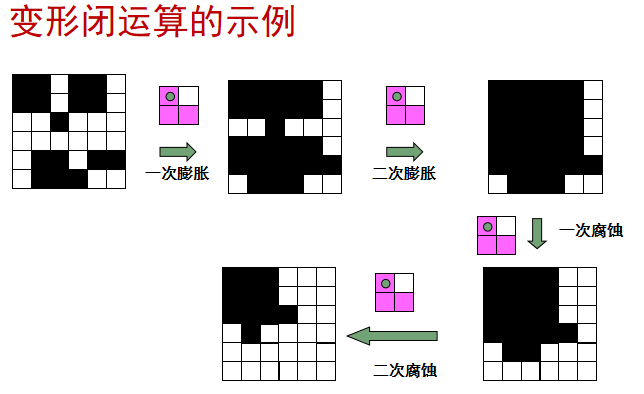
四、开运算与闭运算
开运算,先腐蚀后膨胀
闭运算,先膨胀后腐蚀

课后题*
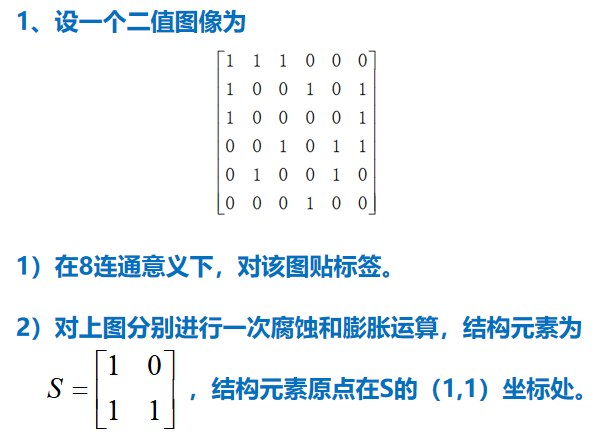
腐蚀:设计一个结构元素,结构元素的原点定位在待处理的目标像素上,通过判断是否覆盖,来确定是否该点被腐蚀掉
膨胀:设计一个结构元素,结构元素的原点定位在背景像素上,判断是否覆盖有目标点,来确定是否该点被膨胀为目标点







第十一讲 彩色图像处理
一、彩色模型**
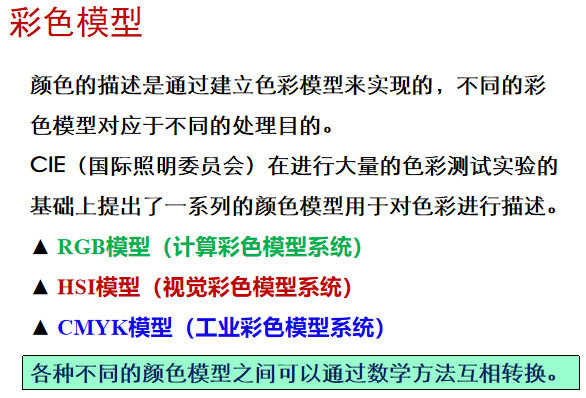
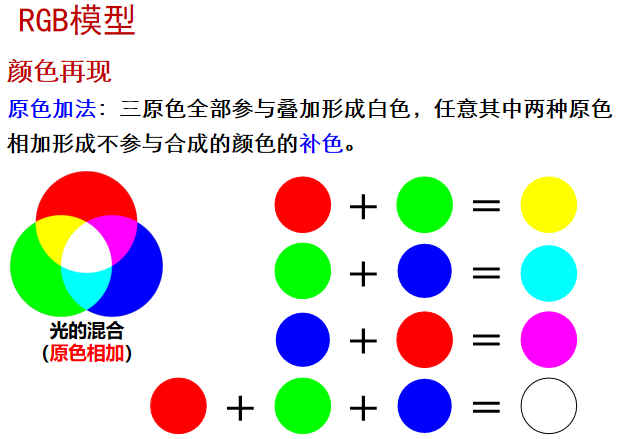
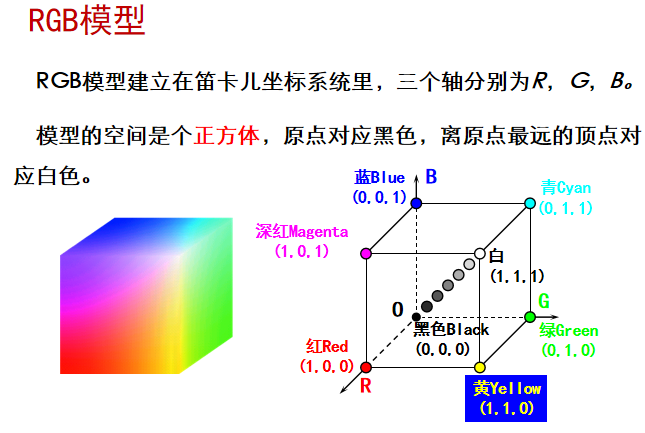
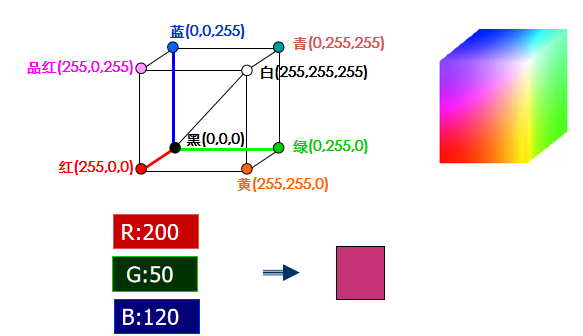
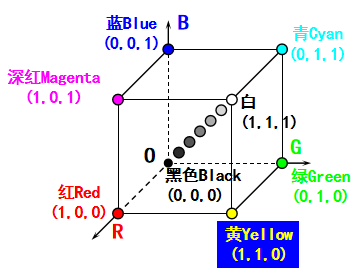
RGB模型**(画笛卡尔坐标系)、计算彩色模型系统
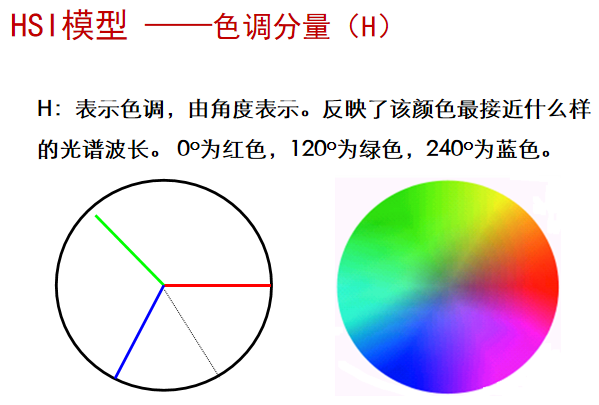
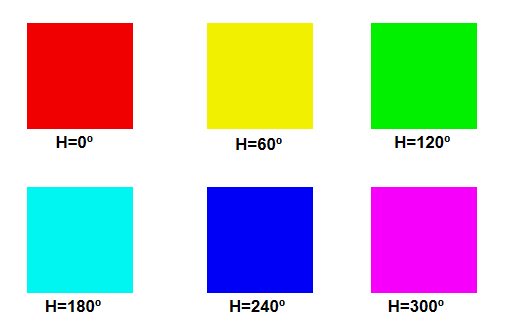
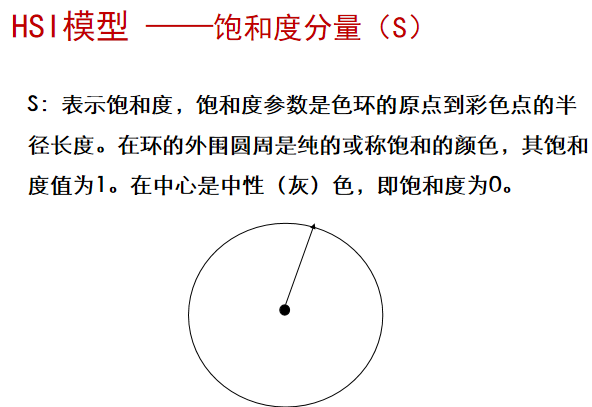
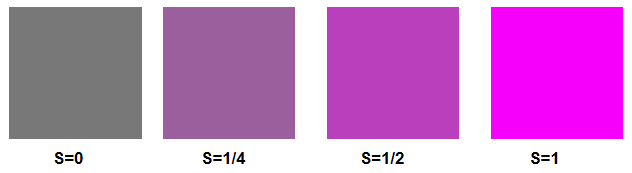
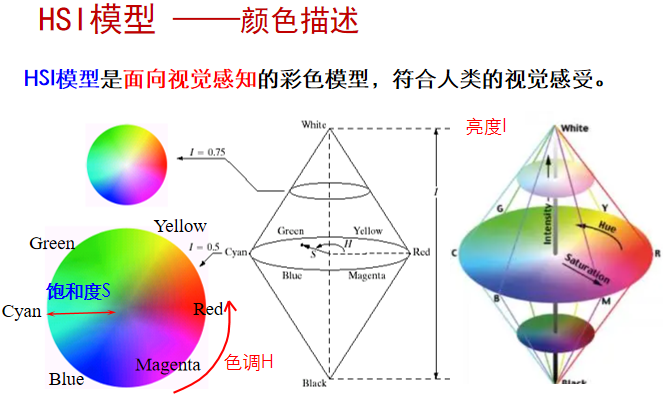
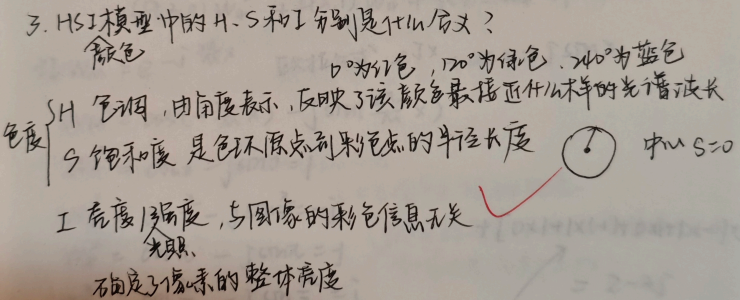
HSI模型(字母含义)---面向视觉感知、视觉彩色模型系统

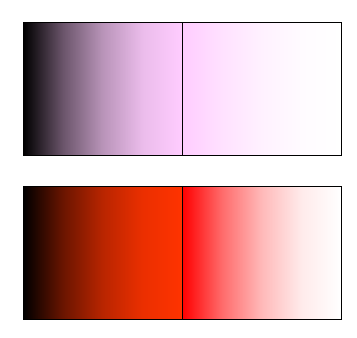
H :色调(Hue) S :饱和度(Saturation) I :亮度(Intensity,或强度)
I 分量与图像的彩色信息无关; H和S分量与人感受颜色的方式紧密相连,合称色度

CMYK模型(字母含义)---印刷行业、工业彩色模型系统
是一种减色系统,将从白光中滤出三种原色之后获得的颜色作为其表色系的三原色CMY
▲C:青色,从白色中滤去红色
▲M:品红,从白色中滤去绿色
▲ Y : 黄色,从白色中滤去蓝色
K为黑色,为了印刷时对黑色可用黑色墨来印刷
二、彩色图像处理
课后题*
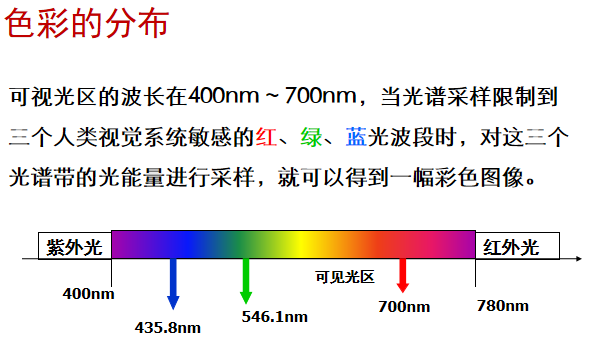
1、人类视觉系统对哪三种颜色的光波敏感?
红、绿、蓝
2、请给出RGB模型的笛卡尔坐标,并在坐标上标出黑、白、红、绿和蓝色的坐标点位置及坐标值。
3、HSI颜色模型中的H、S和I分别是什么含义?
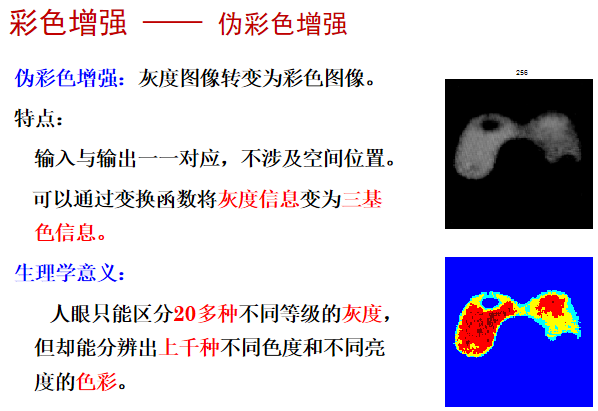
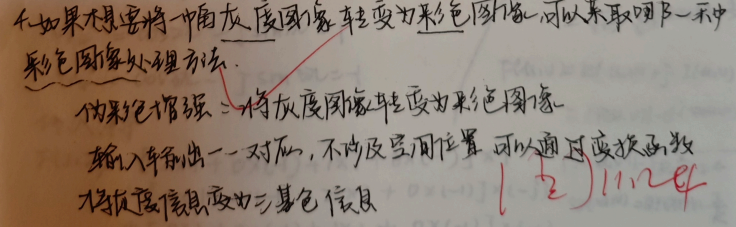
4、如果想要将一幅灰度图像转变为彩色图像,可以采取哪一种彩色图像处理方法?
第十二讲 基本图像变换
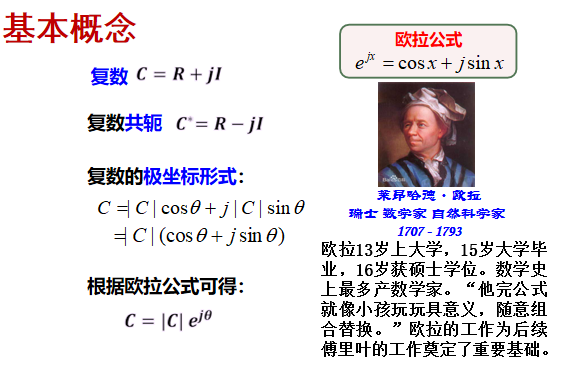
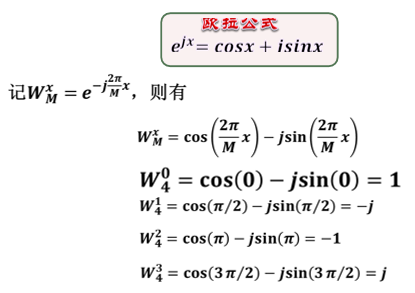
一、欧拉公式*
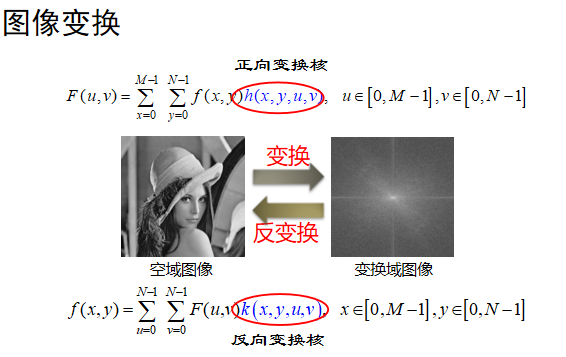
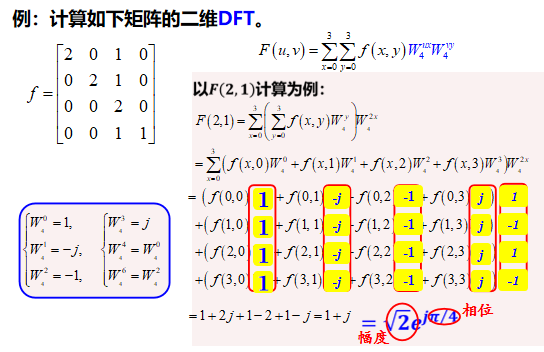
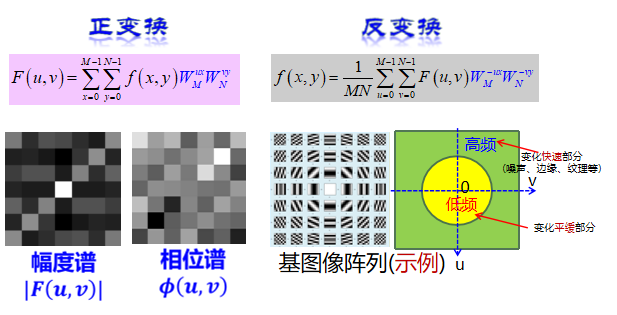
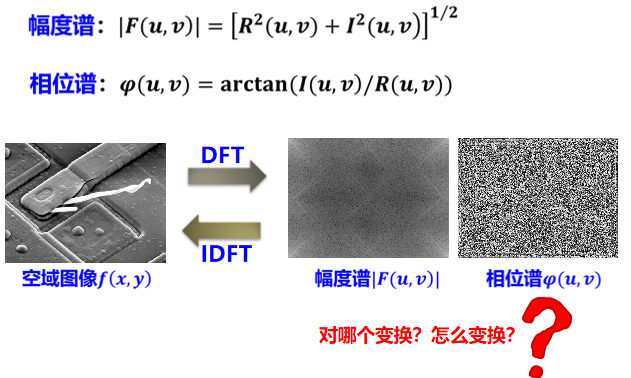
二、图像傅里叶变换
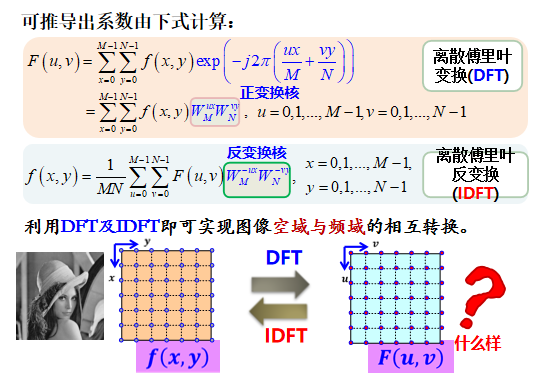
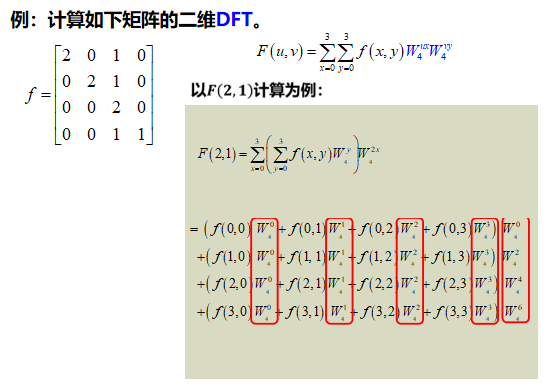
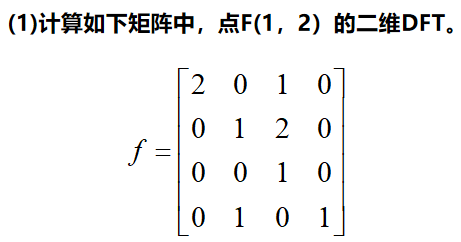
计算DFT*
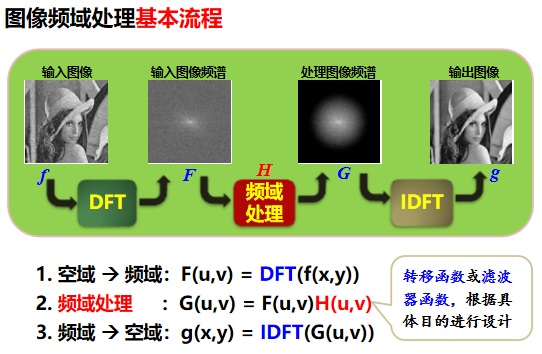
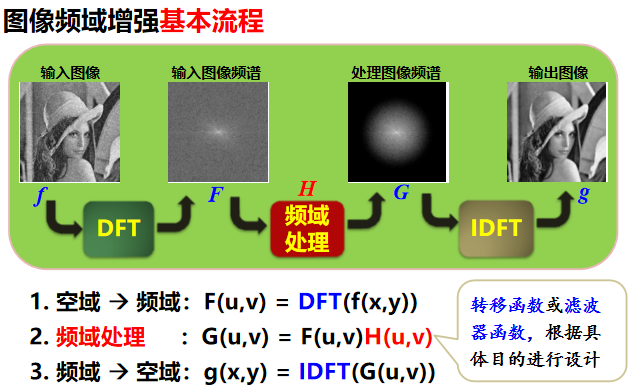
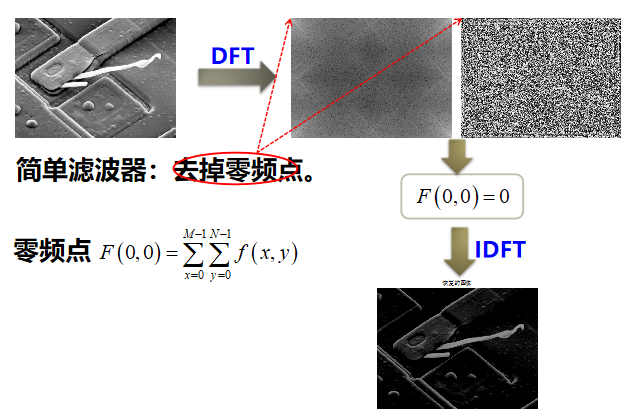
三、图像频域处理基本流程
课后题*
第十三讲 图像频域增强
频域增强基本原理
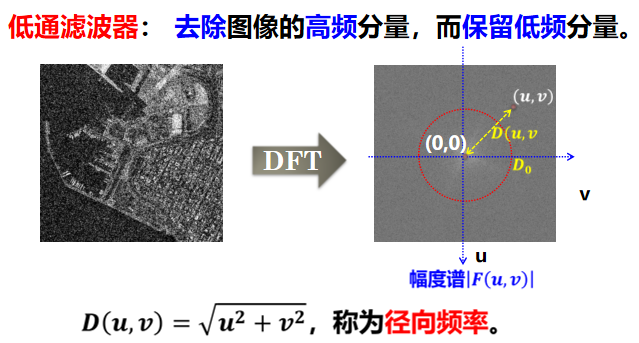
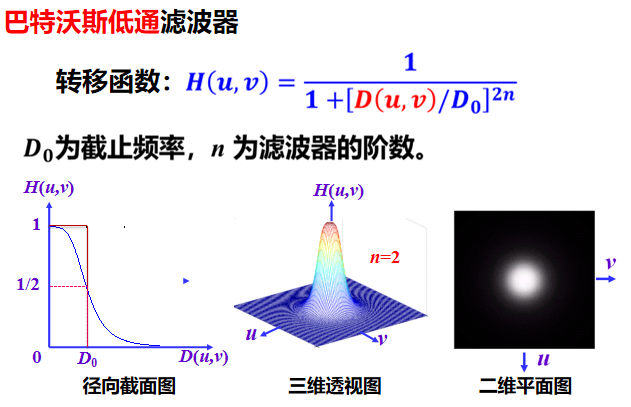
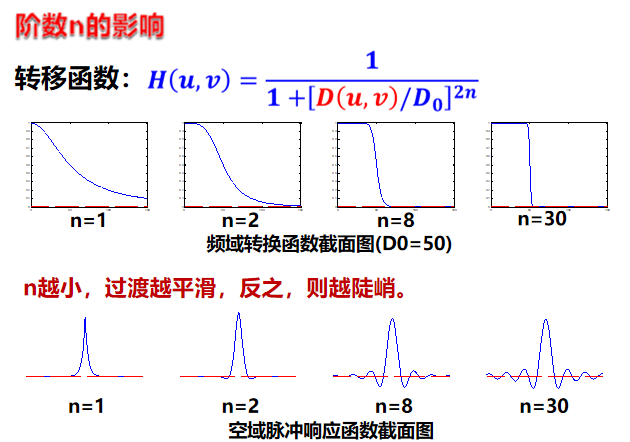
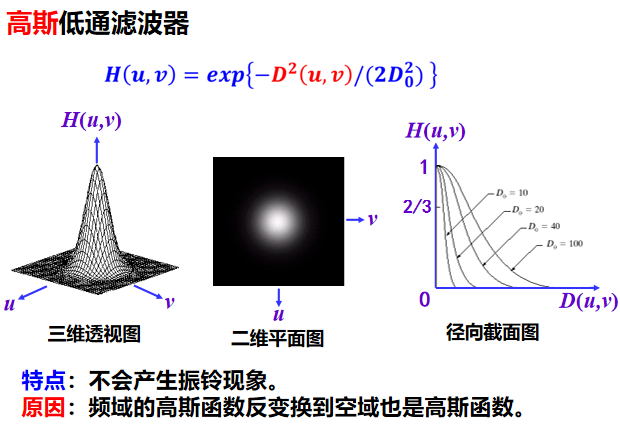
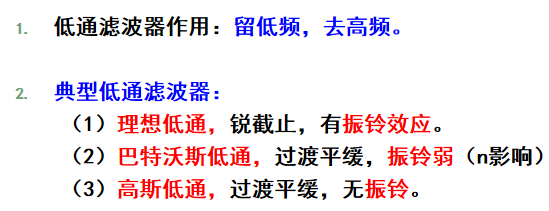
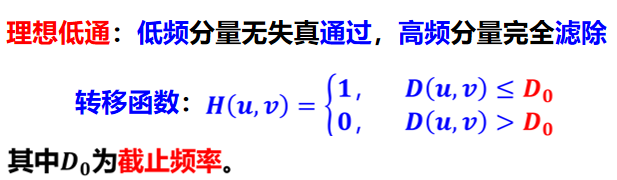
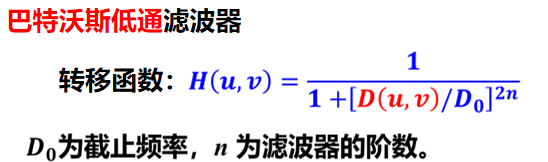
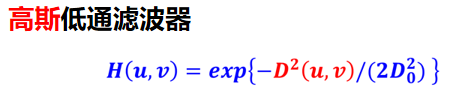
低通滤波
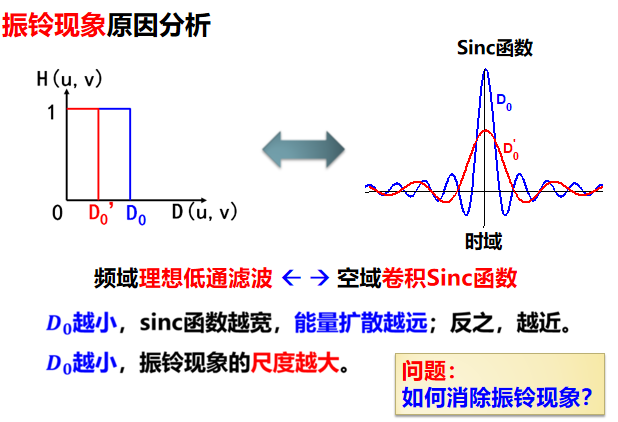
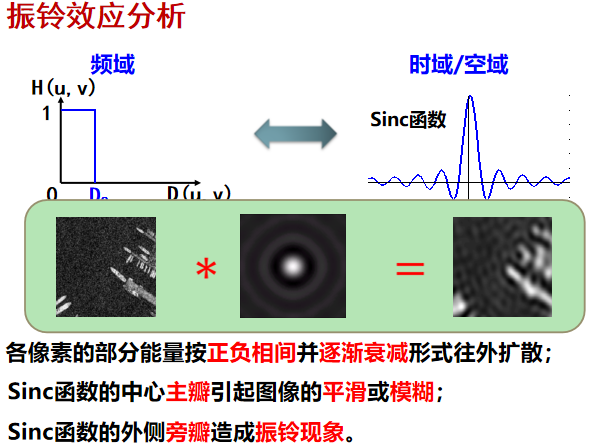
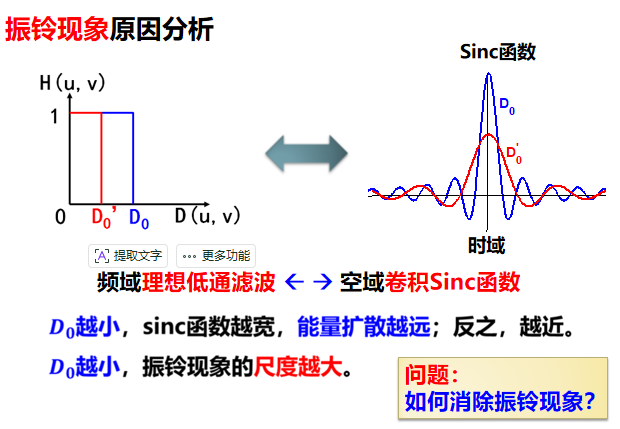
振铃现象
课后题*
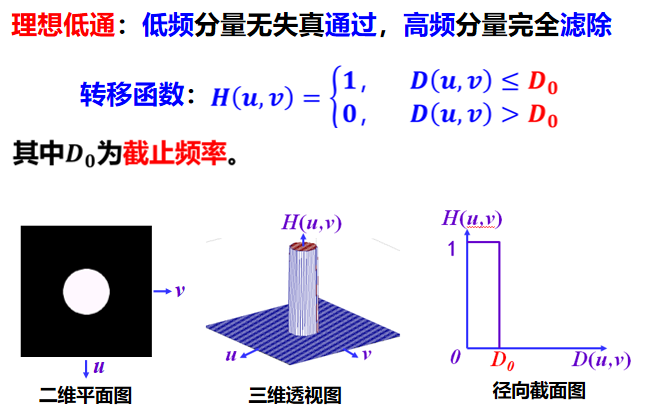
- 给定三种典型的图像低通滤波器的转换函数
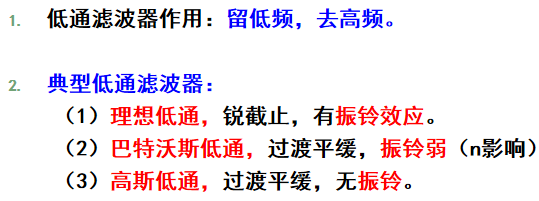
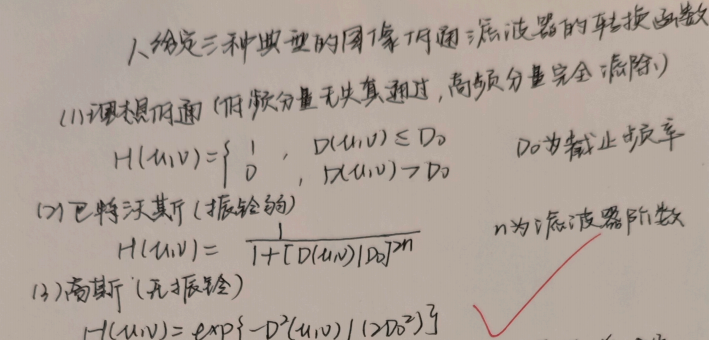
2. 分析理想低通滤波器产生振铃现象的原因,并给出消除或减弱该现象的方法思路