SA8812 是一款集成了双路全桥驱动的高性能步进电机/直流电机驱动器芯片 ,可在 8.0V 至 40V 的宽输入电压范围内工作,每通道支持高达 1.6A 的连续输出电流 。该芯片采用电流模 PWM 控制 ,支持可编程的电流调节、多种衰减模式以及完整的保护功能(包括过流、欠压锁定和过温保护) ,并配备故障状态输出引脚(nFAULT) 。其 HTSSOP28 封装内置散热焊盘,适用于需要高集成度与可靠性的电机控制应用,如打印机、摄像头云台、精密仪器等。
一、芯片核心定位
SA8812 是一款 双H桥电机驱动器 ,集成了两路完整的 N 沟道 MOSFET 全桥,适用于驱动 双极性步进电机 或 两个独立的直流电机
其核心价值在于 8.0--40V 的宽输入电压范围、每通道 1.6A 的连续输出能力、可编程的 PWM 电流调节 以及 多重保护机制
专为 打印机、摄像头云台、数码相机 等需要精确控制电机位置与转矩的应用设计,提供高集成度、高可靠性的电机驱动解决方案
二、关键电气参数详解
电源与功耗特性
- 电机电源电压(VM):8.0V 至 40V(工作范围),绝对最大值 45V
- 工作电流(Ivm_ON):典型 2.5mA(VM=24V)
- 睡眠电流(Ivm_OFF):典型 3μA(nSLEEP=0),超低待机功耗

输出级性能
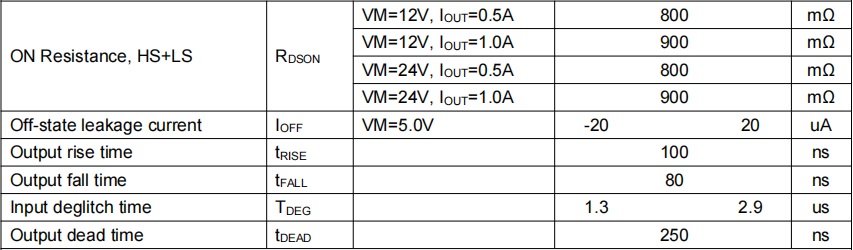
- 导通电阻(RDS(ON)):典型 800mΩ(高边+低边,VM=12V,IOUT=0.5A)
- 连续输出电流(IOUT):每通道最大 1.6A(全桥持续输出)
- 输出上升/下降时间:典型 100ns / 80ns
- 死区时间(tDEAD):250ns,防止上下管直通
电流调节与控制
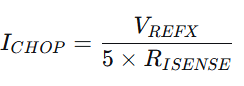
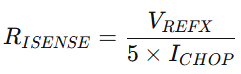
电流检测增益(AISENSE):5 V/V
斩波电流计算公式:
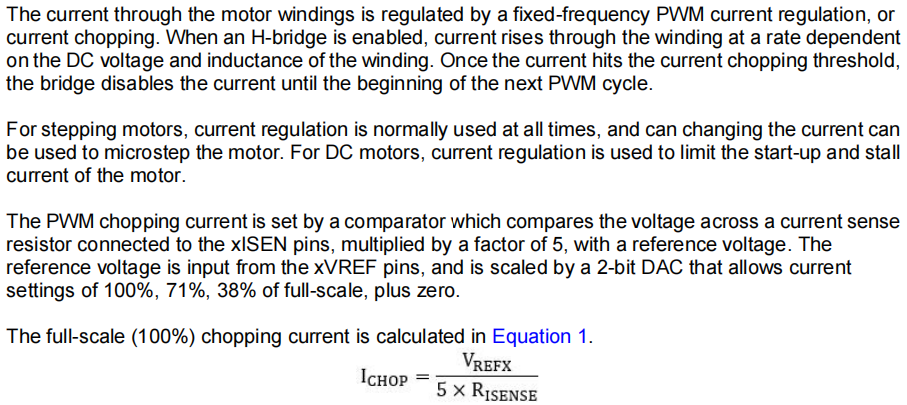
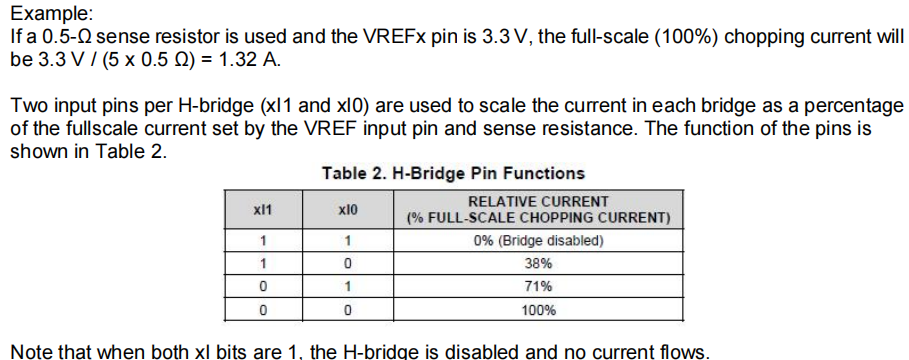
- 电流档位选择(通过 x11、x10 引脚):
00:100% 全电流
01:71%
10:38%
11:桥禁用(无输出)

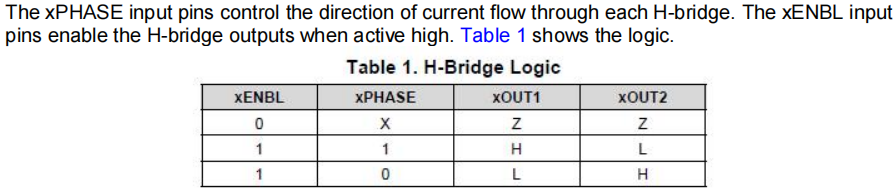
逻辑与控制接口
- 逻辑电平:高电平 > 2.0V,低电平 < 0.7V,兼容 3.3V/5V MCU
- 使能与方向控制:xEN(高电平使能)、xPHASE(方向控制)

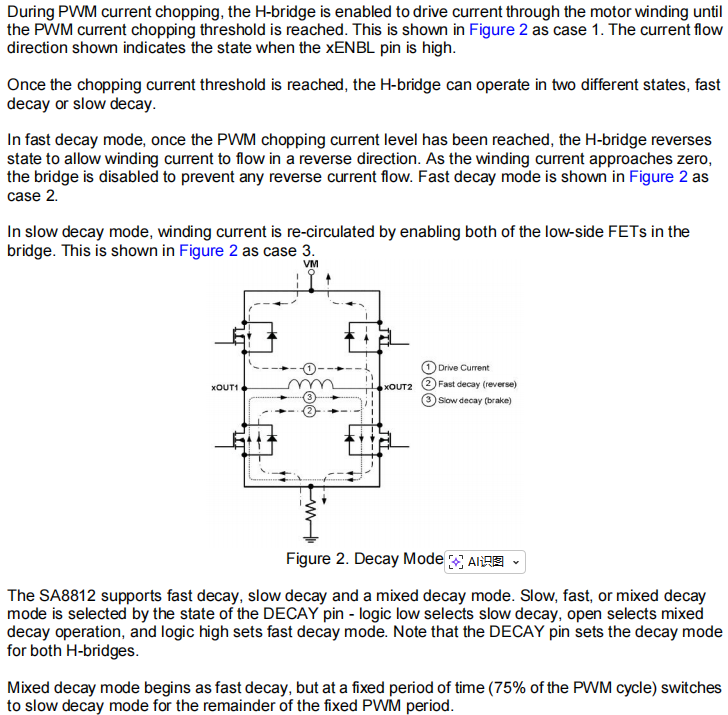
衰减模式选择(DECAY 引脚):
- 低电平:慢衰减
- 悬空:混合衰减
- 高电平:快衰减
保护功能参数
- 过流保护(OCP):触发阈值 1.8--5.0A,消隐时间 2.0μs
- 过温保护(TSD):关断点 150--160°C,恢复迟滞 30°C
- 欠压锁定(UVLO):上升阈值 7.50V,下降阈值 7.20V
- 故障输出(nFAULT):开漏输出,低电平表示故障

三、芯片架构与特性优势
双全桥集成与电流控制
- 内部集成两路独立的 H 桥,每桥包含 4 个 N 沟道 MOSFET,支持双向电流驱动
- 采用固定频率 PWM 电流斩波控制,可实现高精度的转矩与速度调节
灵活的衰减模式
- 支持快衰减、慢衰减与混合衰减三种模式,用户可根据电机特性与噪声要求灵活选择
- 混合衰减模式结合快衰减与慢衰减优点,兼顾响应速度与电流平滑性
智能保护与状态反馈
- 集成 OCP、TSD、UVLO 三重保护,故障时自动关断并拉低 nFAULT 引脚
- nFAULT 为开漏输出,可连接 MCU GPIO 实现故障中断或状态轮询
高集成度与易用性
- 内置 3.3V 线性稳压器(V3P3),可为外部逻辑电路供电
- 采用 HTSSOP28 封装,背面带散热焊盘,便于散热与布局

四、应用设计要点
电源与去耦设计
- VM 引脚必须就近并联 ≥22μF 的电解或固态电容(耐压 ≥45V),并搭配 0.1μF 陶瓷电容进行高频去耦
- V3P3 输出可为外部逻辑电路供电,建议在其输出端添加 1--10μF 陶瓷电容
- 电流检测电阻(RISENSE)选型与布局
根据目标斩波电流与 VREF 电压计算 RISENSE 值:
- 选择低电感、高功率的贴片电阻(如合金电阻),功率裕量建议 ≥2 倍
- RISENSE 必须紧靠 xISEN 引脚与 GND,采用开尔文连接以减小寄生电感影响
PCB 布局与散热
- 功率回路最小化:VM → 芯片 → OUTx → 电机 → ISEN → GND 的环路面积应尽可能小
- 散热焊盘处理:HTSSOP28 背面的散热焊盘必须焊接至 PCB 大面积铜箔(接 GND),并通过多个过孔连接至内层地平面
- 信号隔离:xISEN、xVREF、nFAULT 等模拟与逻辑走线应远离高频开关节点(如 OUTx)
控制逻辑连接
- xEN、xPHASE、DECAY、x11/x10 等控制引脚应连接至 MCU GPIO,并做好上拉/下拉配置
- nRESET 低电平有效,可用于硬件复位;nSLEEP 低电平进入睡眠模式,唤醒时间约 1ms
五、典型应用场景
打印机与自动化设备
- POS 打印机、标签打印机中的步进电机驱动,用于纸张进给与打印头定位
摄像头云台与安防设备
- 网络摄像机、云台摄像机的 Pan/Tilt 电机驱动,支持平滑的位置跟踪与快速响应
数码相机与光学设备
- 自动对焦(AF)与光学防抖(OIS)系统中的微型电机驱动
工业控制与机器人
- 小型机械臂、传送带驱动、阀门控制等需要双电机同步或独立控制的场合
六、调试与常见问题
电机不转或输出异常
- 检查 VM 电压是否高于 UVLO 阈值(>7.50V)
- 确认 nRESET、nSLEEP 引脚为高电平
- 检查 xEN、xPHASE 逻辑电平是否符合真值表
电流调节不准确或振荡
- 确认 RISENSE 阻值与焊接是否良好
- 检查 xVREF 电压是否稳定(建议使用低噪声 LDO 供电)
- 调整衰减模式(DECAY)观察电流波形是否改善
芯片过热或触发 TSD
- 计算实际功耗:PD ≈ IOUT² × RDS(ON) × 通道数
- 检查散热焊盘焊接是否良好,PCB 是否提供足够散热面积
- 评估电机是否堵转或负载过重
nFAULT 常低或无故障时仍为低
- 检查是否触发 OCP、TSD 或 UVLO
- 确认 nFAULT 外部上拉电阻(如 10kΩ)已正确连接至 3.3V
- 测量 nFAULT 引脚对地电阻,正常时应为高阻态
七、总结
SA8812 通过 双全桥集成、可编程 PWM 电流控制、多模式衰减 以及 完备的保护机制 ,为步进电机与直流电机驱动提供了一个高性能、高可靠性的单芯片解决方案
其宽压输入(40V)、双通道 1.6A 输出能力 和 灵活的电流调节 使其特别适用于需要精密运动控制的工业与消费类设备
成功应用的关键在于 合理的电流检测电阻选型、优化的 PCB 布局与散热设计 以及 正确的衰减模式选择
在多电机协同控制、位置伺服及高可靠性运动系统中,SA8812 是一款兼具性能与集成度的优秀驱动芯片
文档出处
本文基于 Sytatek SA8812 芯片数据手册 V1.2 版本整理编写,结合电机驱动系统设计实践
具体设计与应用请以官方最新数据手册为准,建议在实际应用中重点验证 电流环稳定性、热性能 及 保护功能响应