首先配置SDK:Unity SenseGlove力反馈手套 sdk 笔记
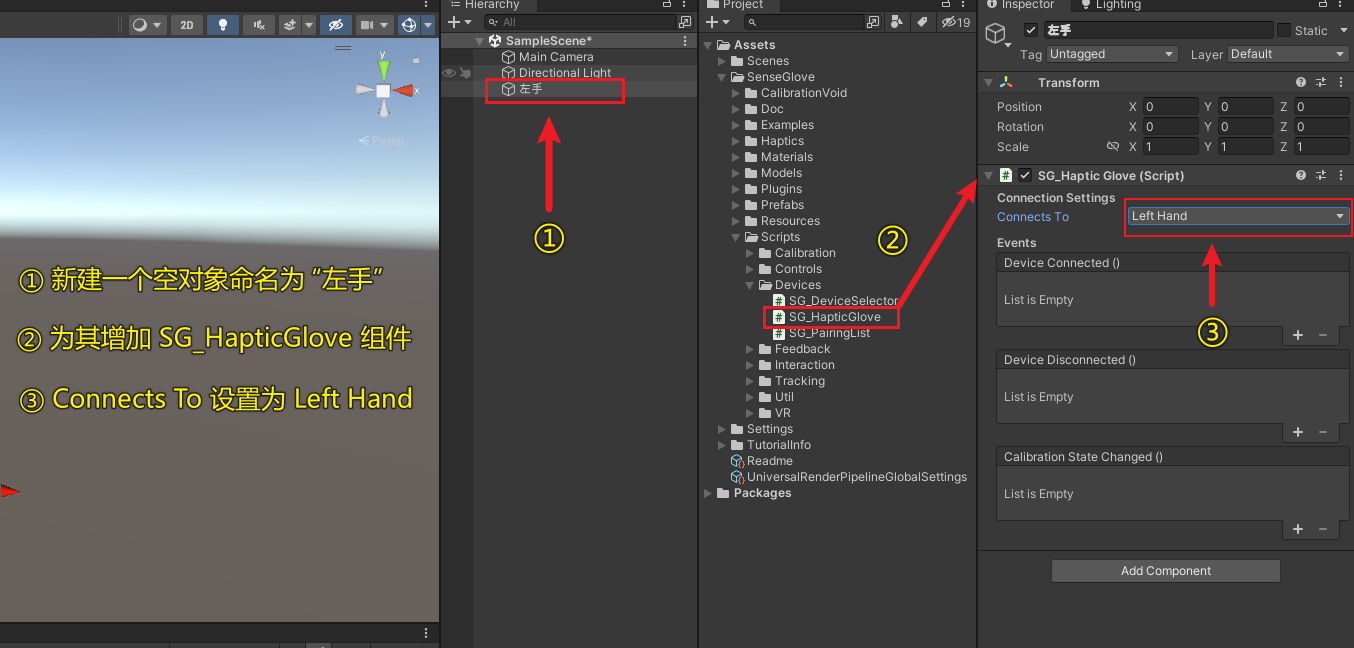
一、新建空对象,增加SG_HapticGlove组件
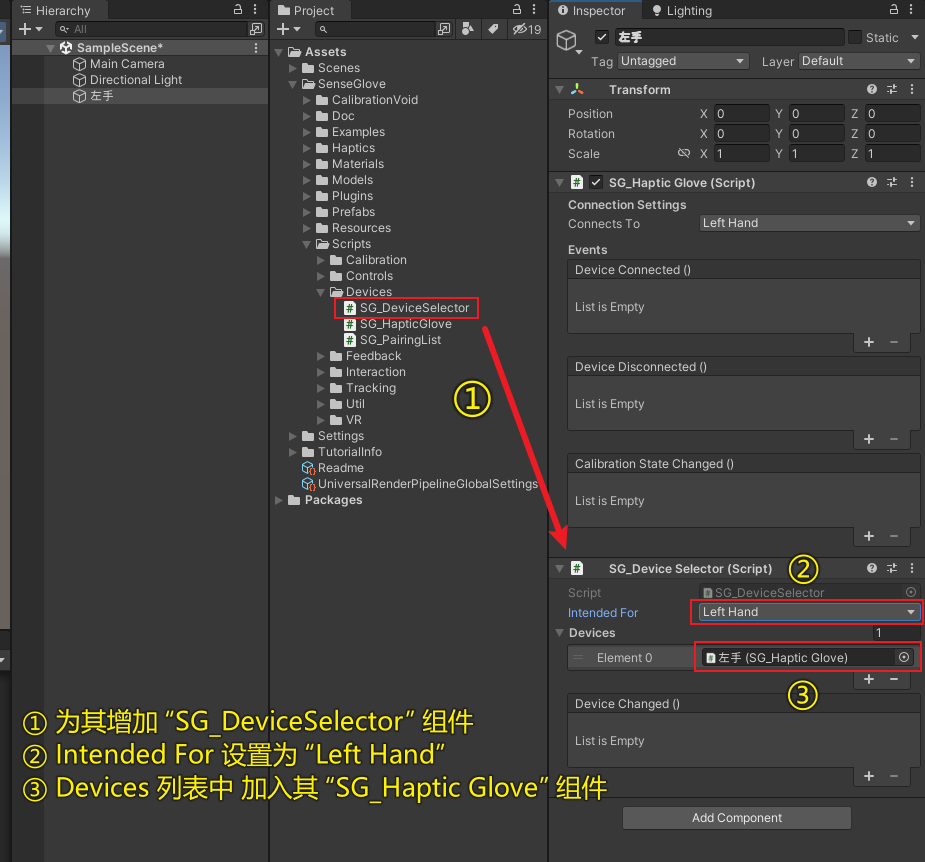
二、增加SG_DeviceSelector组件
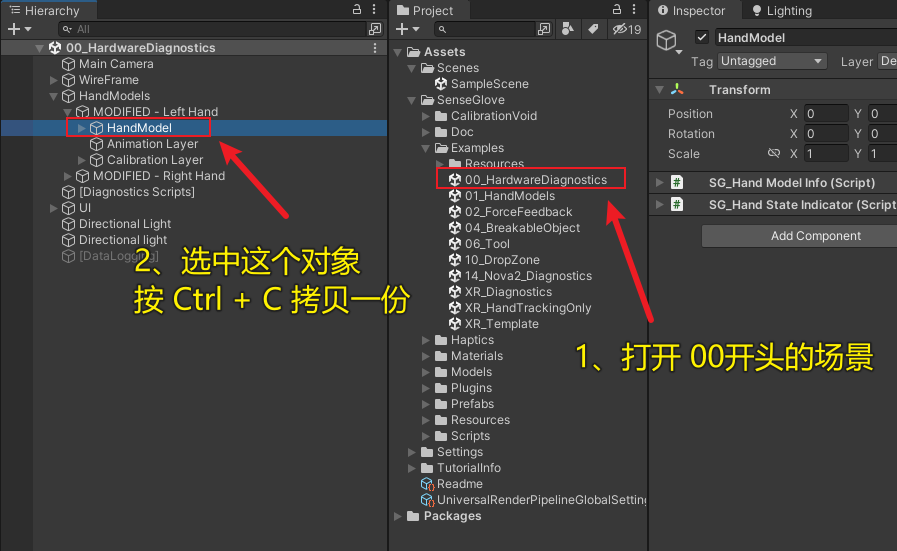
三、打开00...场景(注意保存原场景),拷贝HandModel游戏对象
四、回到原场景,粘贴

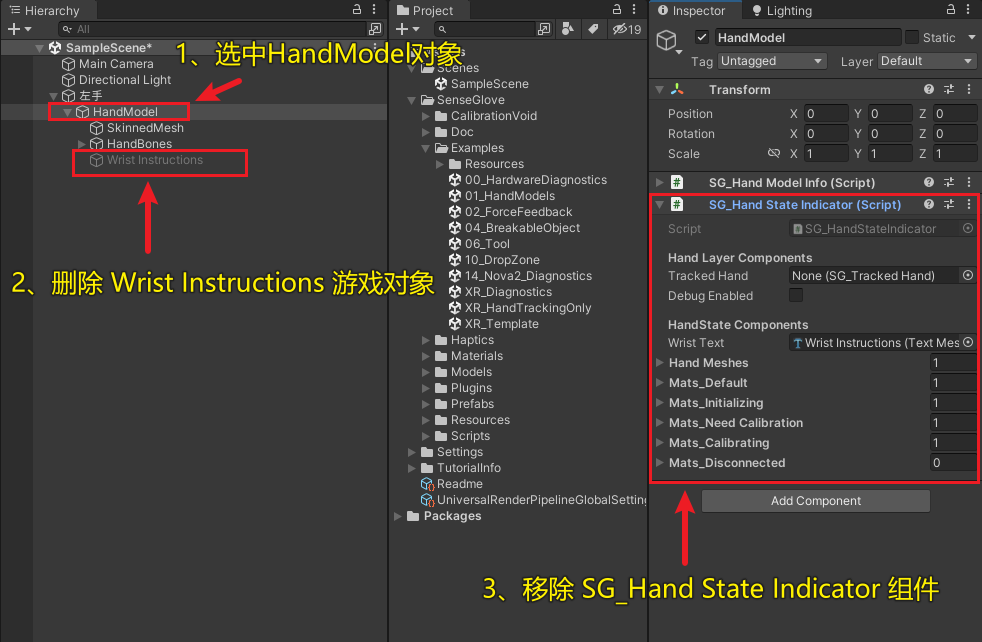
五、删除没必要的对象和组件
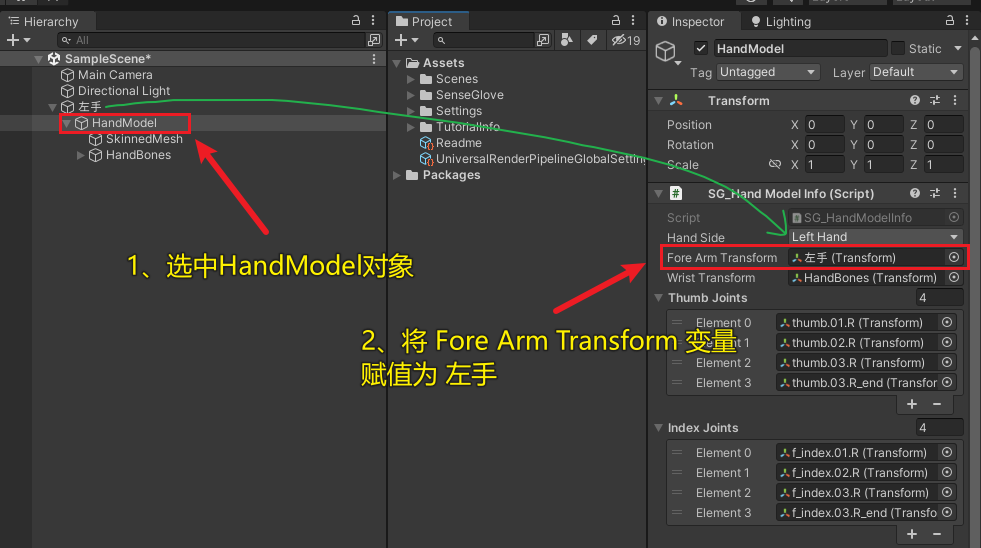
六、将ForeArmTransfrom变量赋值为左手
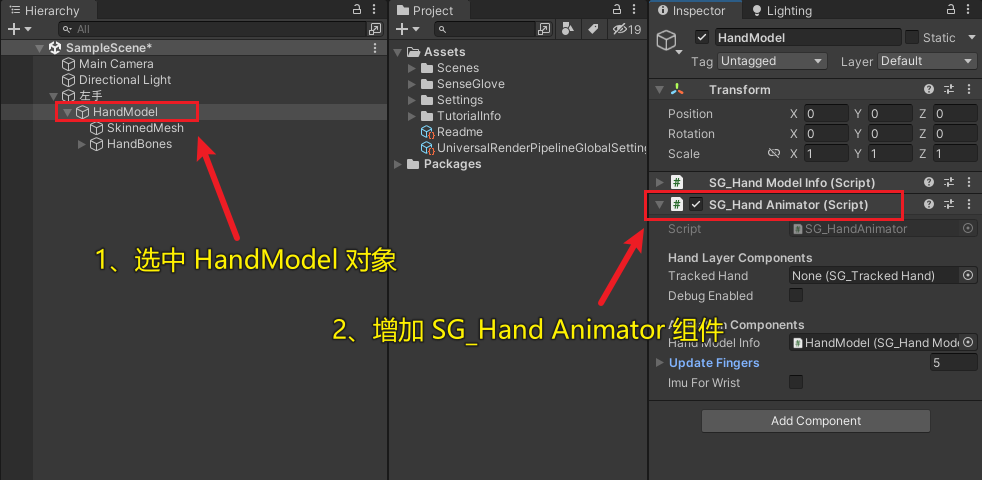
七、增加SG_Hand Animator组件
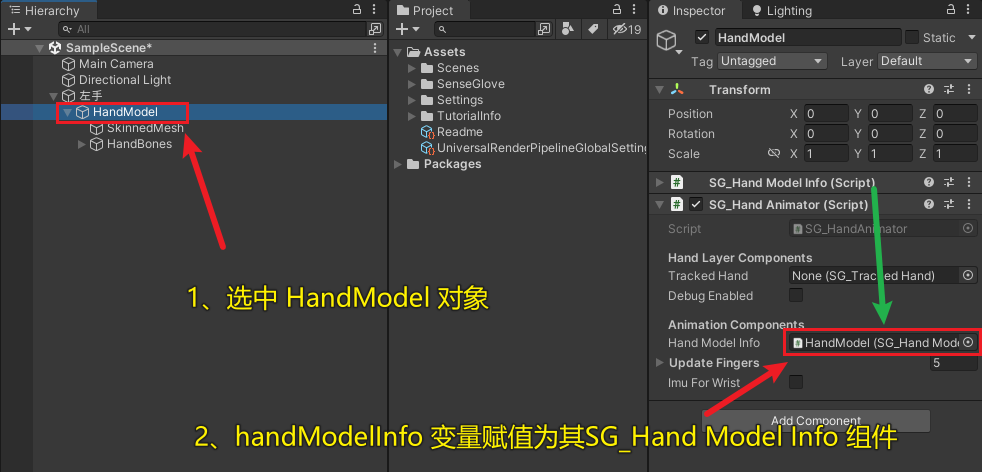
八、handModelInfo变量赋值为其SG_Hand Model Info组件
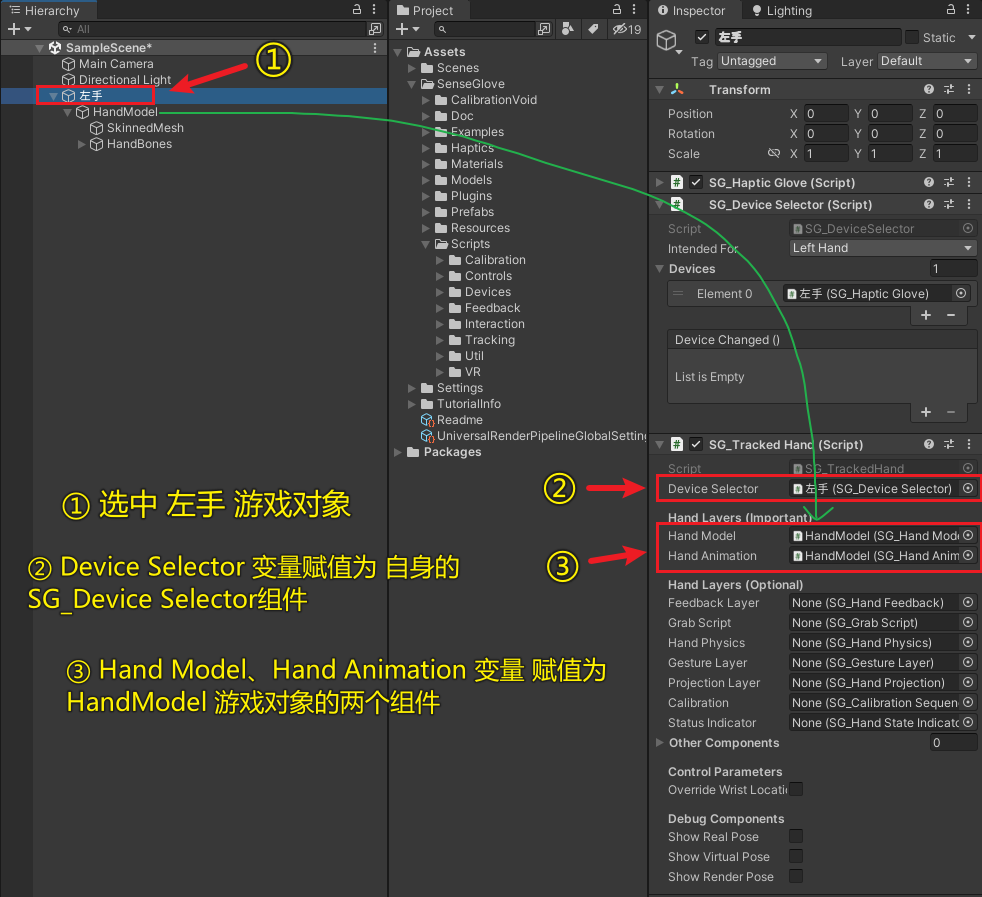
九、增加SG_Tracked Hand组件
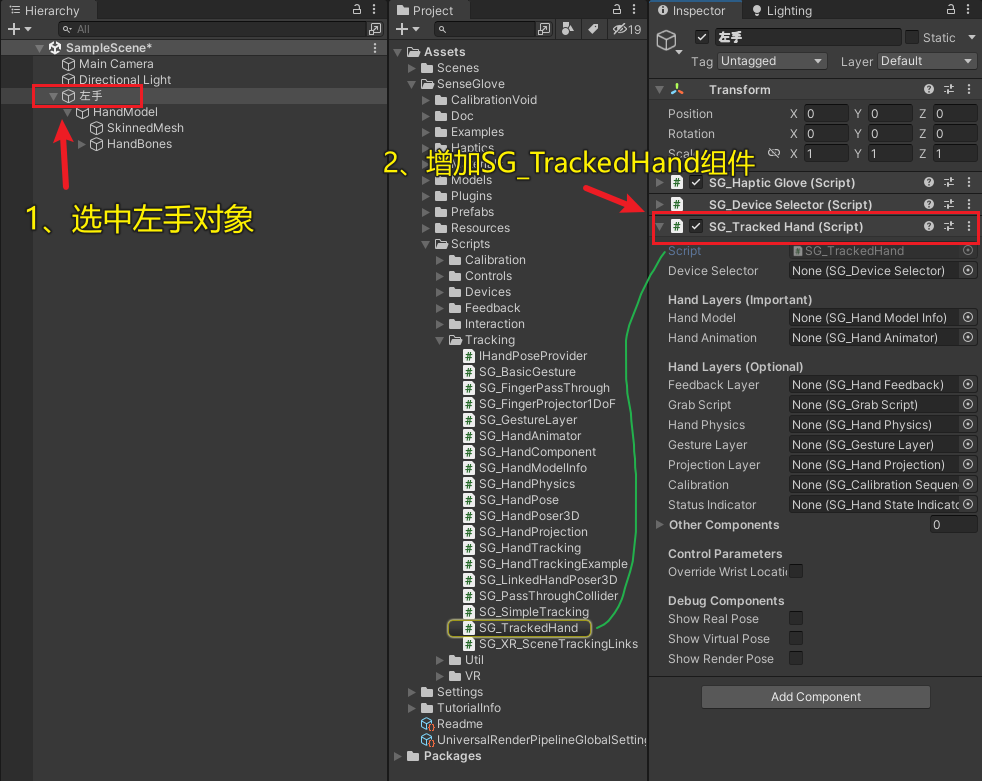
十、配置SG_Tracked Hand组件