低成本视觉-语言-动作(VLA)系统,匹兹堡大学研究团队通过300美元级6DOF机械臂搭配自适应视野集成器,解决传统VLA硬件昂贵、泛化性差的痛点,在真实场景中实现超越现有方法的性能,推动机器人基础模型的普及。
背景与核心挑战
-
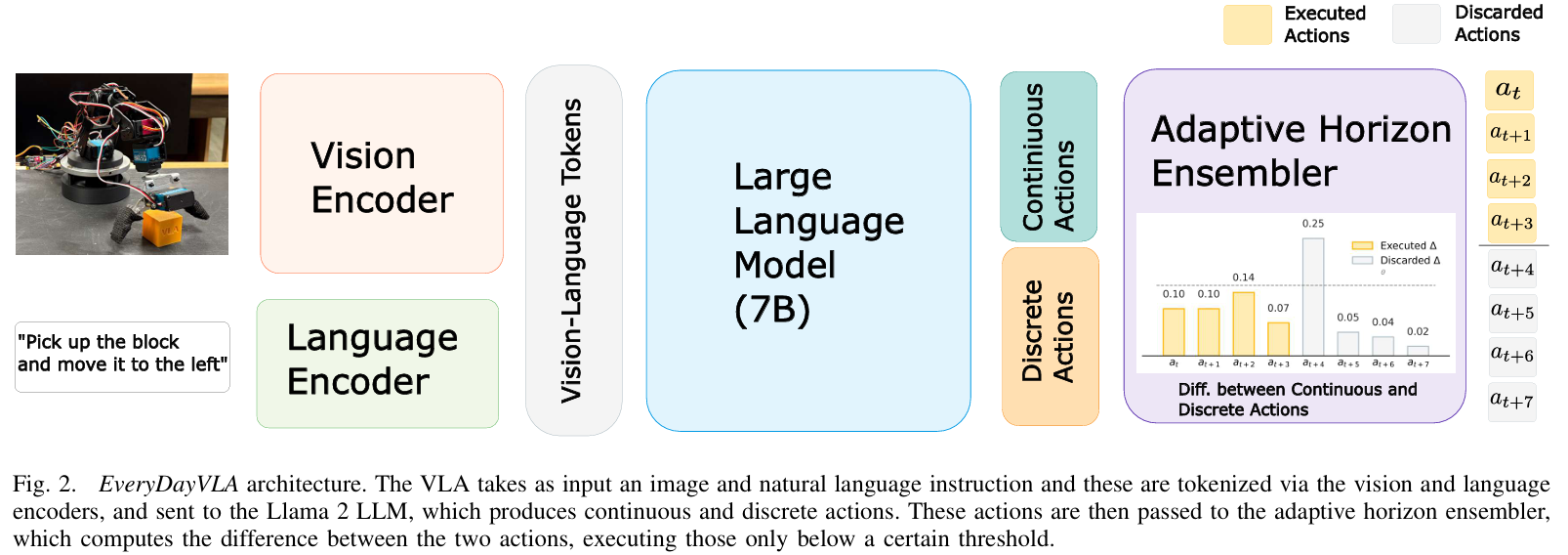
VLA模型优势在于直接从图像和自然语言指令映射到机器人动作,跳过手工设计的感知/规划模块,但在陌生光照、新物体、视觉干扰下易失效,泛化能力不足。
-
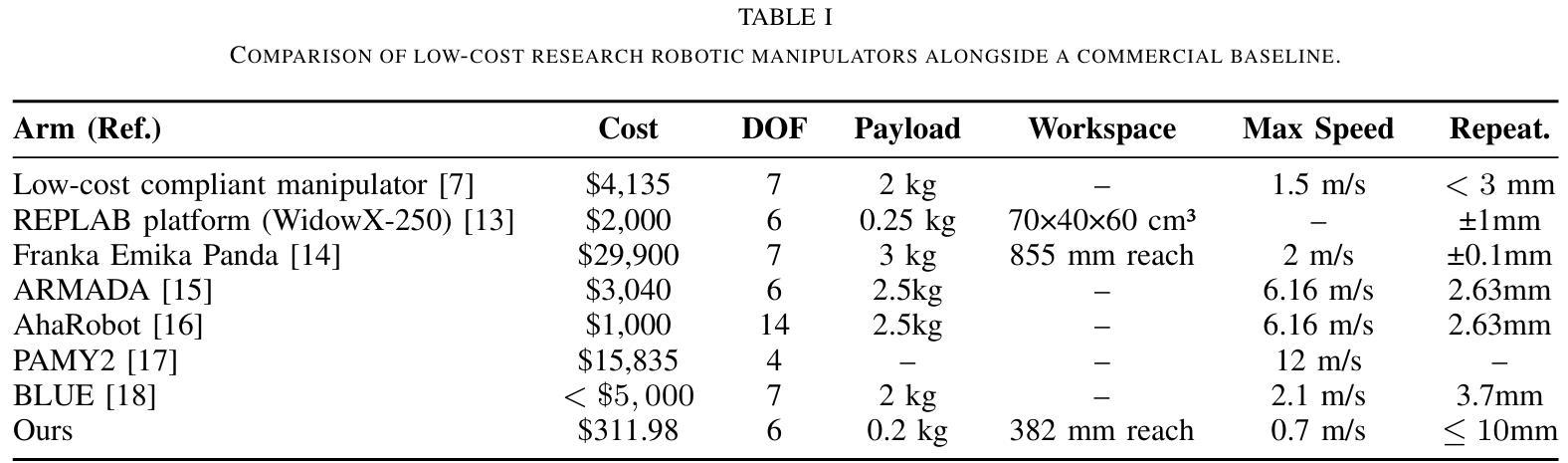
硬件层面,现有顶尖机械臂成本达数千至数万美元,即便"低成本"产品也常超1000美元,且依赖专用软件框架,普通用户和研究者难以获取。
-
训练与数据方面,远程操作数据收集繁琐昂贵,连续动作生成类模型(如扩散模型)训练慢、推理步骤多,自回归模型则存在推理延迟高的问题。
-
论文标题:EveryDayVLA: A Vision-Language-Action Model for Affordable Robotic Manipulation
关键创新
协作训练与自适应视野集成器(AdaHorizon)
- 双动作头设计:联合训练离散自回归动作头和连续L1回归动作头,离散动作擅长高层语义推理,连续动作保障精细操作精度。
- 损失函数设计:用交叉熵损失监督离散动作,L1损失监督连续动作,通过加权求和平衡两者优化:
L C E ( A t , A ^ t ) = − ∑ k = 1 K A t , k log ( A ^ t , k ) \mathcal{L}{CE}(A{t}, \hat{A}{t}) = -\sum{k=1}^{K} A_{t,k} \log(\hat{A}_{t,k}) LCE(At,A^t)=−k=1∑KAt,klog(A^t,k)
L 1 ( A t , A ^ t ) = ∥ A ^ t − A t ∥ 1 \mathcal{L}{1}(A{t}, \hat{A}{t}) = \|\hat{A}{t} - A_{t}\|_{1} L1(At,A^t)=∥A^t−At∥1
L ( A t , A ^ t ) = L C E ( A t , A ^ t ) + λ L 1 ( A t , A ^ t ) \mathcal{L}(A_{t}, \hat{A}{t}) = \mathcal{L}{CE}(A_{t}, \hat{A}{t}) + \lambda \mathcal{L}{1}(A_{t}, \hat{A}_{t}) L(At,A^t)=LCE(At,A^t)+λL1(At,A^t)(λ设为1)
- 自适应重规划:通过计算两种动作预测的平均绝对差估计不确定性,差异超阈值时触发重规划,动态调整动作执行长度(figure2)。算法1明确最小执行动作数、重规划阈值等参数,兼顾实时性与安全性。
低成本6DOF机械臂设计
- 核心参数:成本约311.98美元,6个自由度,有效负载0.2kg,工作半径382mm,最大速度0.7m/s,重复定位精度≤10mm(table1、figure3)。
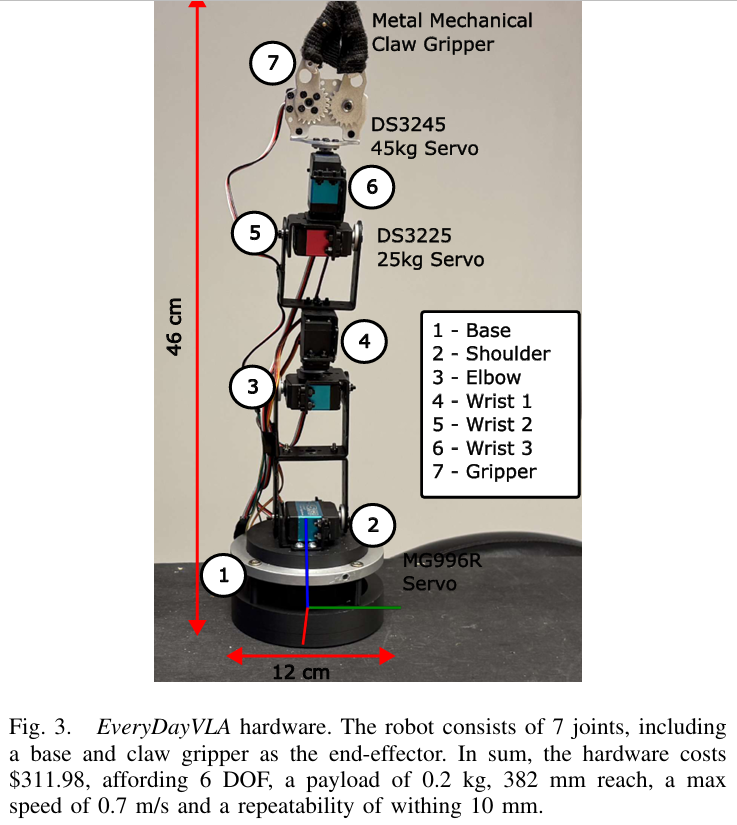
- 硬件选型:采用MG996R、DS3225等市售舵机,关节配置为roll-pitch-pitch-roll-pitch-roll,手腕3个舵机构成类球关节,实现全姿态覆盖。
- 控制方案:使用Arduino Uno搭配PCA9685 12位PWM驱动板,通过I2C通信实现精准控制,降低软件依赖,支持跨操作系统使用。
自动化数据集与数据收集流程
- 数据集规模:包含1200个任务演示样本,每个样本配对自然语言指令、RGB图像序列和末端执行器姿态数据。
- 任务覆盖:涵盖拾取放置、环境操作(如开关抽屉)、堆叠等,通过参数化轨迹基元和通用语言模板快速生成多样化训练样本,简化数据收集。
实验结果与核心表现
仿真基准(LIBERO)
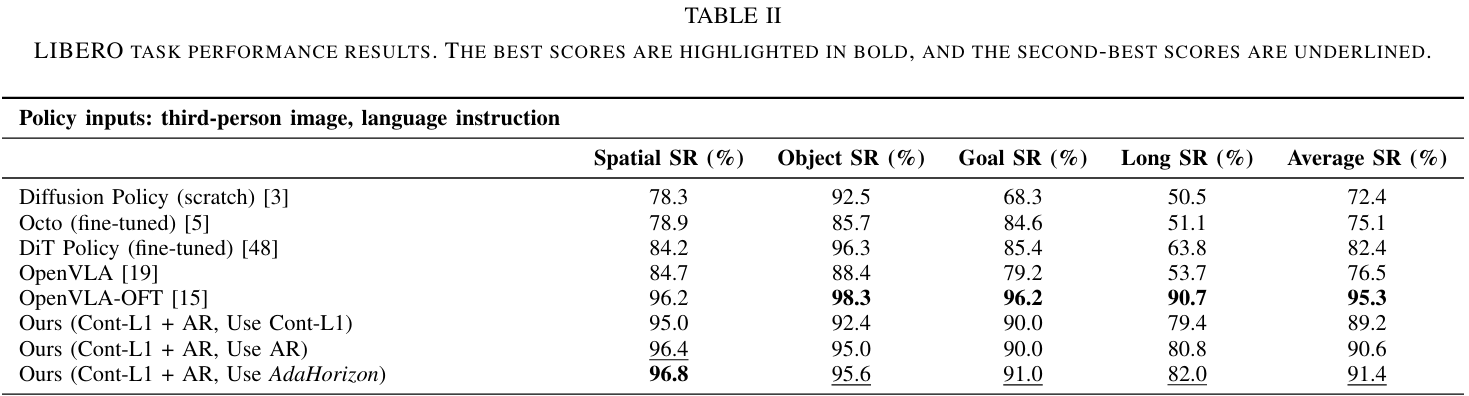
- 综合性能:在空间、物体、目标、长时四大任务套件中,平均成功率达91.4%,仅落后最优基线3.9%,其中空间任务套件成功率96.8%,超越所有基线(table2)。
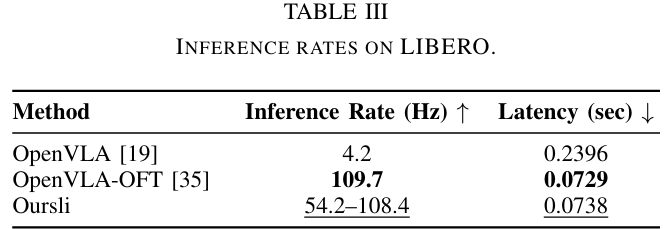
- 推理效率:推理速率达54.2--108.4Hz,延迟仅0.0738秒,接近OpenVLA-OFT的性能,额外开销仅来自自适应视野模块(table3)。
- 集成器优势:AdaHorizon在空间任务中成功率96.8%,比次优集成器高出1.6%,避免传统集成器过度平滑动作流的问题(table5)。

真实世界测试
- 分布内任务:在拾取块、球、岩石等任务中,平均成功率比现有方法高出49%,球类操作表现稳定,仅"拾取并放置到右侧"任务略逊于基线(figure4)。

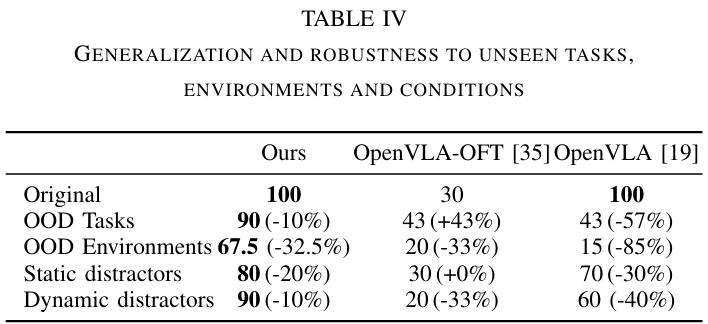
- 分布外任务:在未见过的任务、环境及静态/动态干扰下,平均性能提升34.9%。动态干扰(如人类走动)下仅性能下降10%,静态干扰(杂乱环境)下下降20%,泛化性显著优于OpenVLA系列(table4)。
- 失败模式:主要因物体释放延迟导致失败;OpenVLA-OFT常因抓取对齐错误或过流触发安全停机,OpenVLA则存在间歇性卡顿。
核心价值
通过"低成本硬件+高效模型+开源数据集"的组合,打破VLA技术的准入门槛,让家庭用户和小型研究团队能够接触到机器人基础模型。真实场景中的强泛化性和可靠性,为其在家庭服务、教育科研等领域的普及奠定基础。
具身求职内推来啦
国内最大的具身智能全栈学习社区来啦!
推荐阅读
从零部署π0,π0.5!好用,高性价比!面向具身科研领域打造的轻量级机械臂
工业级真机教程+VLA算法实战(pi0/pi0.5/GR00T/世界模型等)
具身智能算法与落地平台来啦!国内首个面向科研及工业的全栈具身智能机械臂
VLA/VLA+触觉/VLA+RL/具身世界模型等!具身大脑+小脑算法与实战全栈路线来啦~
MuJoCo具身智能实战:从零基础到强化学习与Sim2Real
Diffusion Policy在具身智能领域是怎么应用的?为什么如此重要?