------面向高校与科研院所的农业机器人系统化研究与实验验证装备

在全球农业劳动力结构性短缺与农业智能化转型加速的背景下,果蔬采摘机器人已成为智能农业装备领域的重要研究方向之一。
果蔬采摘作业具有环境复杂、目标多样、遮挡严重、操作精细度要求高等显著特征,对机器人在环境w感知、定位导航、智能决策及柔性执行等方面提出了更高要求。
高校与科研院所在相关研究中,普遍面临实验环境真实性不足、系统集成难度高、算法验证与工程落地脱节等问题。为此,本系统面向科研需求,构建了一套融合SLAM自主导航与视觉感知的智能果蔬采摘机器人科研平台,以真实农业作业场景为研究对象,为多学科交叉研究提供稳定、开放、可重复的实验基础。
系统总体架构与设计思路
本平台采用"移动平台 + 多传感器感知 + 智能决策控制 + 采摘执行机构"的总体架构设计,强调系统级协同与算法级可验证性。
该系统可作为完整采摘机器人运行,也可拆分为独立研究模块,满足不同课题组在感知、导航、控制或系统集成方向上的研究需求。
整体系统包括:
移动机器人底盘与自主导航系统
多传感器融合SLAM与环境建图系统
视觉感知与果蔬目标识别系统
多自由度机械臂与采摘执行系统
机器人操作系统与科研控制平台
关键技术模块与科研支撑能力
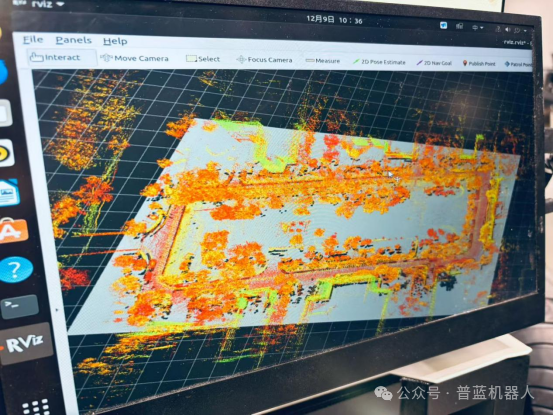
- 多传感器融合SLAM导航与建图系统
系统集成激光雷达、视觉传感器与惯性测量单元,构建适用于果园、温室等半结构化环境的SLAM算法框架。支持二维与三维环境建图、实时定位与路径规划,可用于研究:
复杂农业场景下的高鲁棒SLAM算法
动态环境与遮挡条件下的定位稳定性
多传感器数据融合与误差建模方法
农业环境中导航策略与避障算法优化
该模块为移动机器人定位、路径规划与作业调度研究提供基础支撑。
- 视觉感知与果蔬识别技术平台
系统搭载高分辨率视觉传感器与深度感知设备,构建果蔬目标检测、三维定位与成熟度识别算法验证平台。
支持深度学习模型与传统视觉算法的对比研究,可用于:
果实目标检测与分类算法研究
成熟度、遮挡与光照变化下的视觉感知
三维点云重建与空间位姿估计
视觉---机械臂协同与视觉伺服控制
该模块为计算机视觉、模式识别与智能感知方向提供真实应用场景。

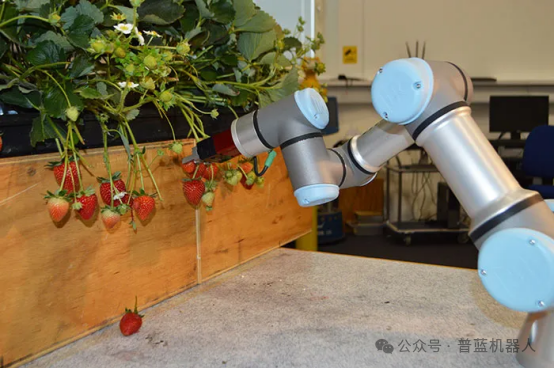
- 采摘机械臂与智能执行系统
平台配置多自由度机械臂及可更换式末端执行器,支持位置控制、力控制与柔顺控制策略研究。
科研人员可围绕以下方向开展实验:
果蔬柔性抓取与无损采摘技术
力觉反馈与安全控制策略
机械臂轨迹规划与避障算法
复杂空间下的采摘动作优化
该系统为机器人操作、运动控制及人机协作研究提供实验支撑。
- 系统级决策与协同控制平台
系统基于机器人操作系统(ROS)与工业计算平台,实现感知、导航、决策与执行的统一管理。支持算法快速部署、参数调整、日志记录与实验数据回放,便于开展系统级对比实验和性能评估研究。
实验验证体系与科研应用模式
平台已构建完整的实验验证流程,包括环境建图精度测试、目标识别准确率评估、采摘成功率与系统稳定性测试等。
科研人员可基于该平台开展:
单模块算法性能验证
多模块协同系统实验
不同算法方案对比研究
长周期自主作业稳定性测试
该实验体系为科研论文、项目结题与成果转化提供可靠数据支撑。
教学支撑与人才培养价值
除科研应用外,本平台亦可作为高校教学实验设备,支持:
农业机器人与智能装备课程实验
研究生科研训练与课题设计
本科生毕业设计与创新实践
学科竞赛与工程训练项目
通过真实系统操作,提升学生对智能机器人系统工程的理解能力。
开放性设计与二次开发能力
平台在软硬件层面均采用标准化接口设计,支持传感器扩展、算法替换与功能重构,便于科研人员进行二次开发与长期演进。系统可根据不同研究方向定制功能模块,满足多层次科研需求。
合作模式与应用前景
该平台适用于高校、科研院所及重点实验室开展农业机器人相关研究,也可作为智慧农业与无人化装备研发的技术验证平台。可支持联合科研、项目申报、平台共建、成果转化与人才培养等多种合作模式。