第一步:自动检测并安装推荐驱动
1. 更新软件源
sudo apt update2. 查看推荐驱动版本
ubuntu-drivers devices3. 安装推荐(指定)驱动
sudo apt install nvidia-driver-XXX第二步:完成安装并重启
sudo reboot第三步:验证并切换模式
1. 验证是否安装成功
nvidia-smi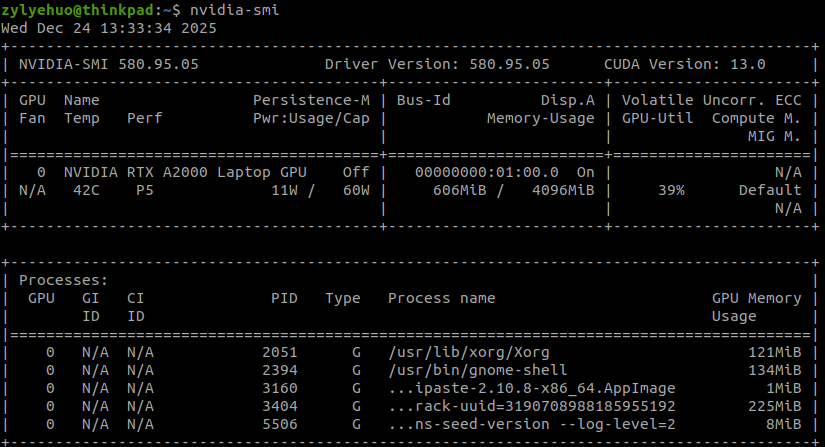
2. 设置显卡模式: 为了确保外接显示器稳定,建议将显卡设置为"性能模式"
sudo prime-select nvidia第四步:切换到 Xorg 模式
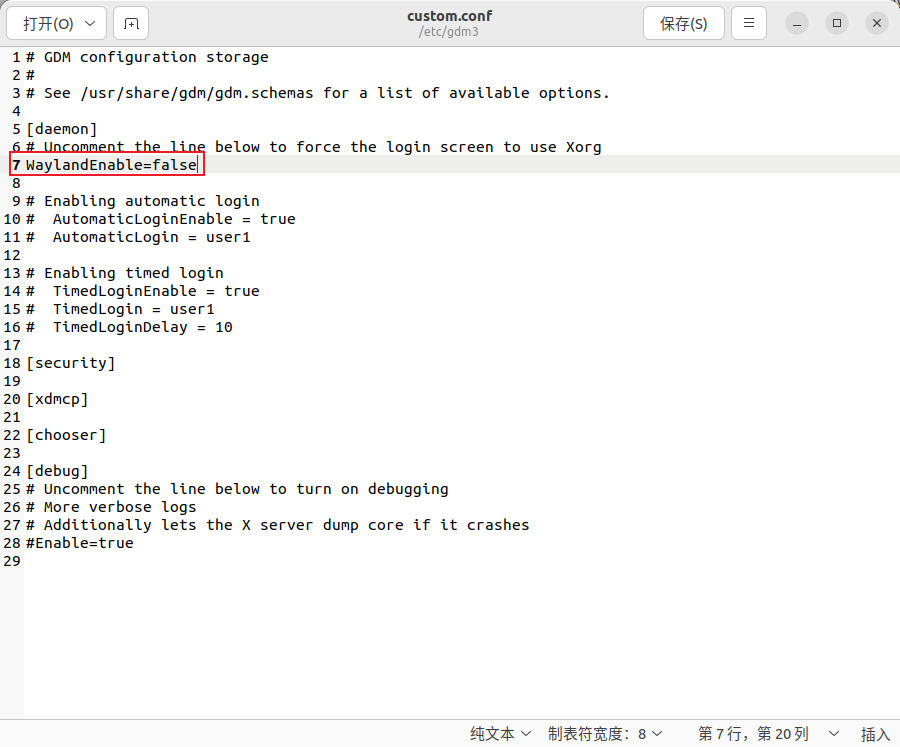
驱动层面没问题后,如果屏幕依然不显示,通常是因为 Wayland 桌面合成器没有正确把画面输出到 NVIDIA 驱动的接口上。
修改 GDM 配置文件,这个操作会强制系统禁用 Wayland,从而默认使用 Xorg。
sudo gedit /etc/gdm3/custom.conf在打开的文件中,找到这一行:# WaylandEnable=false,去掉前面的 # 号
第五步:重启系统
sudo reboot