文章目录
- DDPM
- UNet
- [Stable Diffusion](#Stable Diffusion)
- Transfusion
- [π 0 \pi0 π0 : A Vision-Language-Action Flow Model for General Robot Control](#π 0 \pi0 π0 : A Vision-Language-Action Flow Model for General Robot Control)
DDPM
DDPM算法过程:其中前向加噪是已知的高斯马尔可夫链,即手动加噪的过程;反向去噪用神经网络逐步预测噪声并还原。
给定步数 T T T,设一串噪声强度 { β t } t = 1 T \{\beta_t\}{t=1}^T {βt}t=1T,并定义
α t = 1 − β t , α ˉ t = ∏ s = 1 t α s \alpha_t = 1-\beta_t,\qquad \bar\alpha_t=\prod{s=1}^t \alpha_s αt=1−βt,αˉt=s=1∏tαs
常用的是 β t \beta_t βt 随 t t t 增大,论文里也用线性增长的 β t \beta_t βt 设置。
前向过程(加噪 / diffusion)
从原始数据 x 0 x_0 x0 出发,采样一个 t t t,用公式可以表示为:
x t = α ˉ t x 0 + 1 − α ˉ t ε , ε ∼ N ( 0 , I ) x_t = \sqrt{\bar\alpha_t} x_0 + \sqrt{1-\bar\alpha_t} \varepsilon,\quad \varepsilon\sim\mathcal N(0,I) xt=αˉt x0+1−αˉt ε,ε∼N(0,I)
这与我们的想法不同,DDPM不是逐步进行加噪的,而是一步完整的。 t t t直接控制了加噪的程度, t t t越大, β t \beta_t βt越大, α ˉ t \bar\alpha_t αˉt越小, 1 − α ˉ t \sqrt{1-\bar\alpha_t} 1−αˉt 就越大,加噪程度越大。
训练
核心做法:随机抽一个时间步 t t t,把 x 0 x_0 x0 直接加噪成 x t x_t xt,让噪声预测网络 ε θ ( x t , t ) \varepsilon_\theta(x_t,t) εθ(xt,t) 去拟合真实噪声 ε \varepsilon ε,用 MSE 训练。
伪代码:
- 采样真实数据 x 0 ∼ q ( x 0 ) x_0 \sim q(x_0) x0∼q(x0)
- 均匀采样时间步 t ∼ Uniform ( 1 , ... , T ) t \sim \text{Uniform}({1,\dots,T}) t∼Uniform(1,...,T)
- 采样噪声 ε ∼ N ( 0 , I ) \varepsilon \sim \mathcal N(0,I) ε∼N(0,I)
- 构造 x t = α ˉ t x 0 + 1 − α ˉ t ε x_t=\sqrt{\bar\alpha_t}x_0+\sqrt{1-\bar\alpha_t}\varepsilon xt=αˉt x0+1−αˉt ε
- 最小化 L = ∣ ε − ε θ ( x t , t ) ∣ 2 \mathcal L = |\varepsilon - \varepsilon_\theta(x_t,t)|^2 L=∣ε−εθ(xt,t)∣2
直观理解:网络学到"这张图在第 t t t 步被加了多大噪声、噪声长啥样",从而学会去噪。
采样 / 生成(从纯噪声一步步去噪到数据)
从 x T ∼ N ( 0 , I ) x_T\sim\mathcal N(0,I) xT∼N(0,I) 开始,按 t = T → 1 t=T\to 1 t=T→1 迭代,用网络输出的 ε θ ( x t , t ) \varepsilon_\theta(x_t,t) εθ(xt,t) 做一次去噪,得到 x t − 1 x_{t-1} xt−1。
伪代码:
- 初始化 x T ∼ N ( 0 , I ) x_T \sim \mathcal N(0,I) xT∼N(0,I)
- 对 t = T , T − 1 , ... , 1 t=T,T-1,\dots,1 t=T,T−1,...,1:
- 若 t > 1 t>1 t>1,采样 z ∼ N ( 0 , I ) z\sim\mathcal N(0,I) z∼N(0,I),否则 z = 0 z=0 z=0
- 更新:
x t − 1 = 1 α t ( x t − 1 − α t 1 − α ˉ t , ε θ ( x t , t ) ) + σ t z x_{t-1}=\frac{1}{\sqrt{\alpha_t}}\Bigl(x_t-\frac{\sqrt{1-\alpha_t}}{1-\bar\alpha_t},\varepsilon_\theta(x_t,t)\Bigr)+\sigma_t z xt−1=αt 1(xt−1−αˉt1−αt ,εθ(xt,t))+σtz
- 输出 x 0 x_0 x0
UNet
-
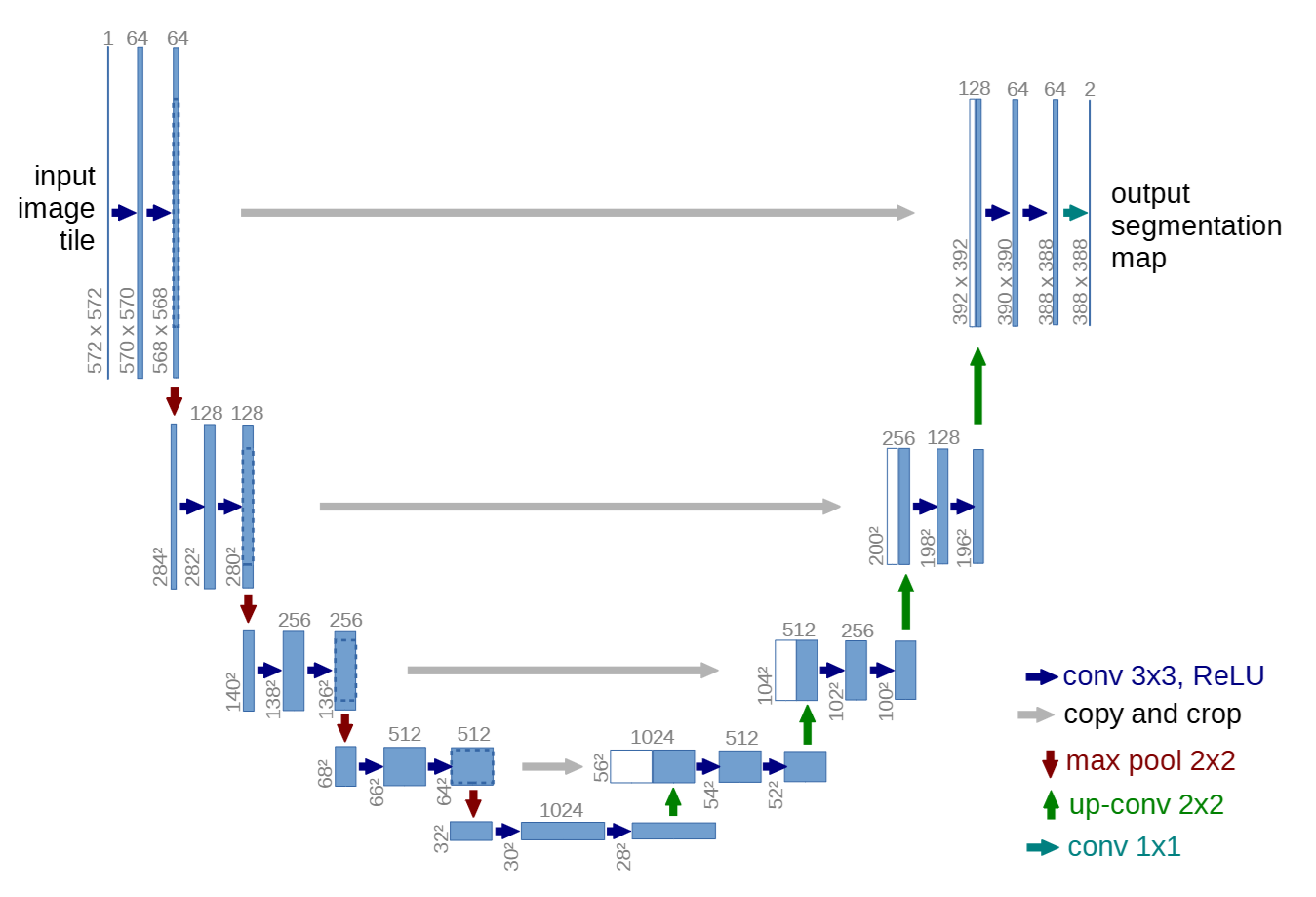
U-Net 是一种典型的编码器--解码器(Encoder--Decoder)结构,其核心目标是在生成或预测图像时,同时兼顾全局语义理解与局部细节保留。编码器通过多次卷积和下采样逐步降低空间分辨率、提升语义抽象能力,从而捕获"图像是什么";解码器则通过上采样将高层语义逐步还原为高分辨率图像。
-
为避免编码过程中细节信息的丢失,U-Net 在编码器与解码器的对应层之间引入跳跃连接(Skip Connection),将早期保留的空间结构直接传递给后期生成阶段,从而实现语义与细节的有效融合。具体实现是copy and crop:
- 在原版 U-Net 中,由于使用的是 valid(不 padding)的 3×3 卷积,特征图在编码器阶段会不断变小,而解码器通过上采样无法恢复这些被卷积"吃掉"的边缘像素,因此同层的 encoder 与 decoder 特征图在空间尺寸上不一致
- copy and crop 的含义就是:将 encoder 对应层的特征图复制出来,从四周对称裁剪(crop)到与 decoder 当前特征图相同的大小,然后在 通道维度上拼接(concat),以融合 encoder 的高分辨率定位信息和 decoder 的高层语义信息
- 这不是 resize 或 padding,而是为了解决尺寸不匹配并保证像素级对齐的必要操作,在现代使用 same padding 的 U-Net 中通常不再需要。
-
Stable Diffusion
-
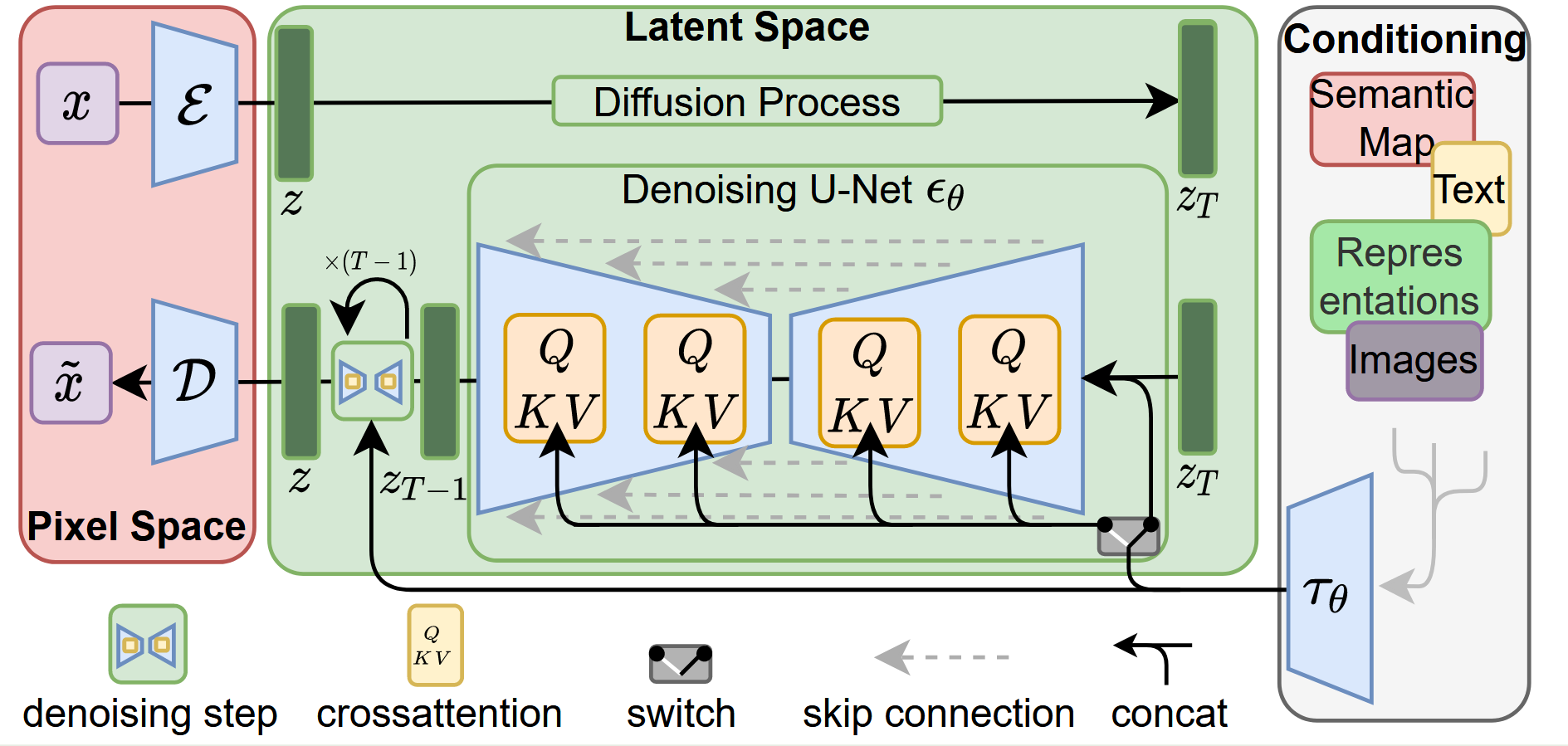
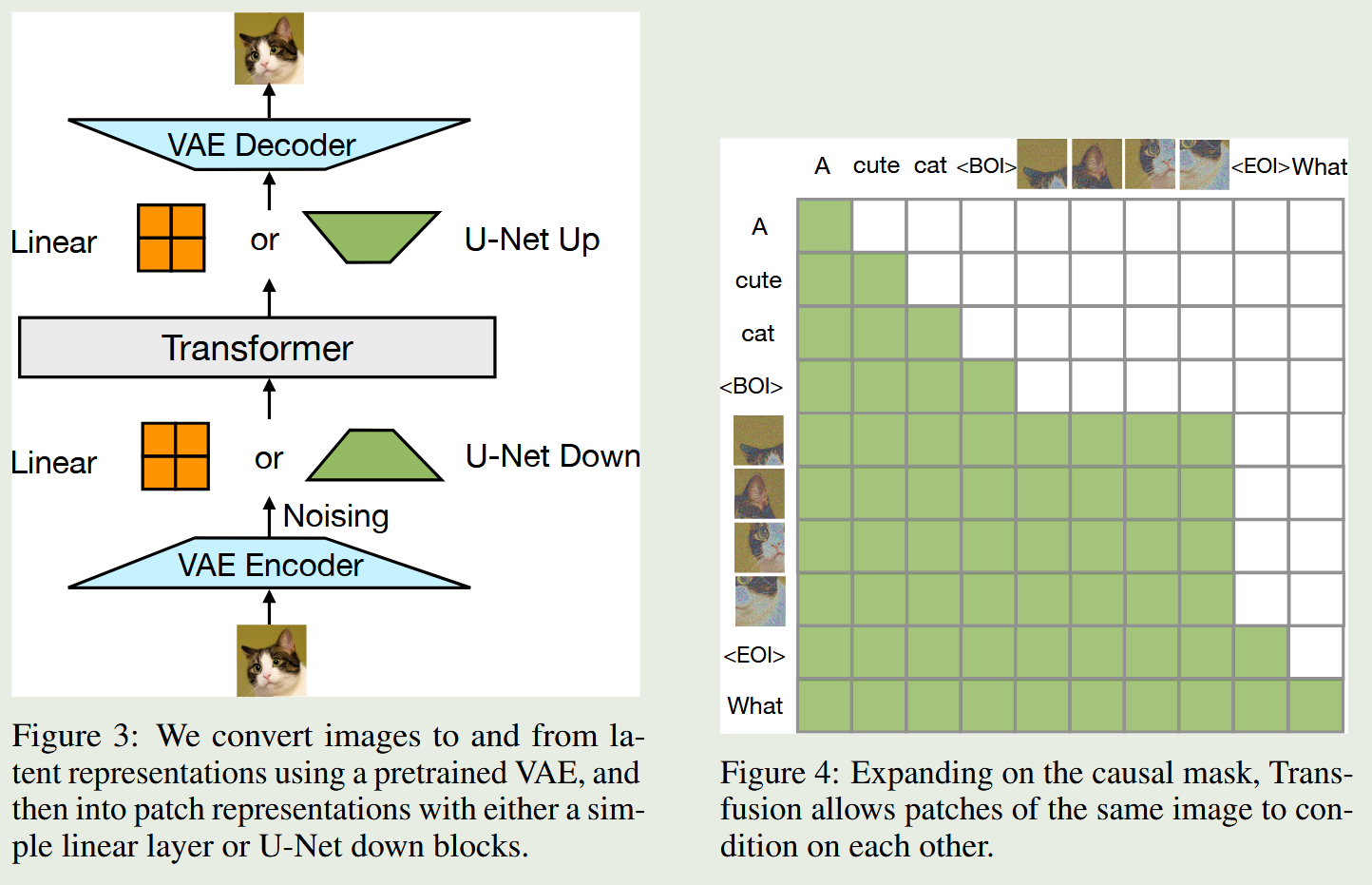
与像素级扩散模型不同,Stable Diffusion 首先通过 VAE 将高分辨率图像压缩为低分辨率、高语义密度的潜表示。扩散过程仅在该潜空间中进行,从而显著降低计算成本和显存开销,同时保持较高的生成质量。
-
Stable Diffusion 基于 Latent Diffusion Model(LDM) 架构,将扩散过程从高维像素空间转移到由 VAE 学习得到的低维潜空间中。模型推理由文本编码器(CLIP)、潜空间去噪网络(条件 U-Net)和 VAE 解码器组成。VAE 负责在图像与潜变量之间进行双向映射。
-
Stable Diffusion 的U-Net 架构,由多层下采样编码器、瓶颈层和对称的上采样解码器构成,并通过 skip connection 保留多尺度特征信息。与传统 U-Net 不同的是,该模型在多个分辨率层中引入了 Transformer Block,从而增强全局建模能力。这种 CNN 与 Transformer 的混合结构兼顾了局部纹理建模与长程依赖建模,适合复杂图像生成任务。每个Transformer Block由self-attention、cross-attention、FFN组成。潜空间特征首选要flatten成序列(类似text embedding),才能被输入到Transformer-Block中。在 cross-attention 中,潜空间特征作为 Query,文本特征作为 Key 和 Value,使模型能够在空间位置级别对齐文本语义。这一机制使得 Stable Diffusion 能够精细控制图像内容和局部细节,是 prompt 驱动生成能力的核心来源。
-
扩散过程被离散为多个时间步,每个时间步通过时间嵌入(time embedding)注入到 U-Net 各层,使模型能够感知当前噪声强度。具体是把时间步t进行sinusoidal embedding,通过MLP,注入到UNet。
-
Transfusion
-
背景:有方法通常要么将图像量化为离散 token 并用语言模型统一建模,要么将语言模型与扩散模型通过外部接口拼接。这两类方案分别引入了信息瓶颈或系统复杂度。Transfusion 提出了一种不同的思路:不强行统一模态表示,而是在同一模型中为不同模态使用各自最合适的生成目标。
-
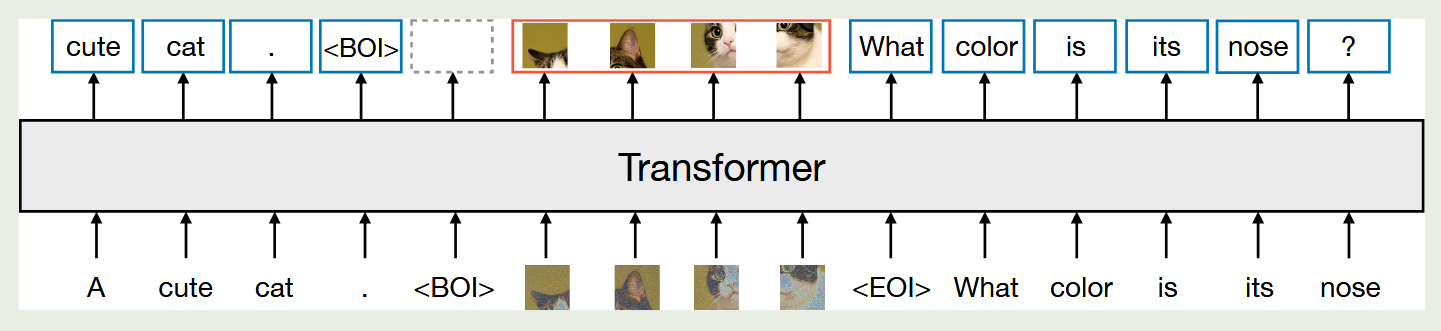
Transfusion基于Transformer进行训练。模型在文本上采用标准的 next-token prediction,在图像上采用扩散模型的噪声预测损失。模型采用了一种混合注意力机制:文本 token 之间使用因果注意力,而同一图像内部的 patch 之间使用双向注意力,主要是因为图像的patch之间有明显的双向依赖关系。
-
输入的图像首先通过 VAE 编码到 latent 空间,再被切分为一系列连续的 latent patch 向量。文本 token 与图像 patch 被拼接进同一个序列中,并使用特殊标记 和 标识图像的起止位置。
-
在推理阶段,Transfusion 在文本生成与图像生成之间动态切换。当模型以语言模型方式生成文本时,采用标准的自回归采样;一旦生成 标记,模型便切换到扩散模式,在序列中追加固定数量的纯噪声 latent patch,并通过多步扩散去噪同时更新所有 patch。扩散完成后,去噪后的 latent patch 被重新排列为 latent feature map,并通过 VAE 解码器还原为最终图像。
-
π 0 \pi0 π0 : A Vision-Language-Action Flow Model for General Robot Control
-
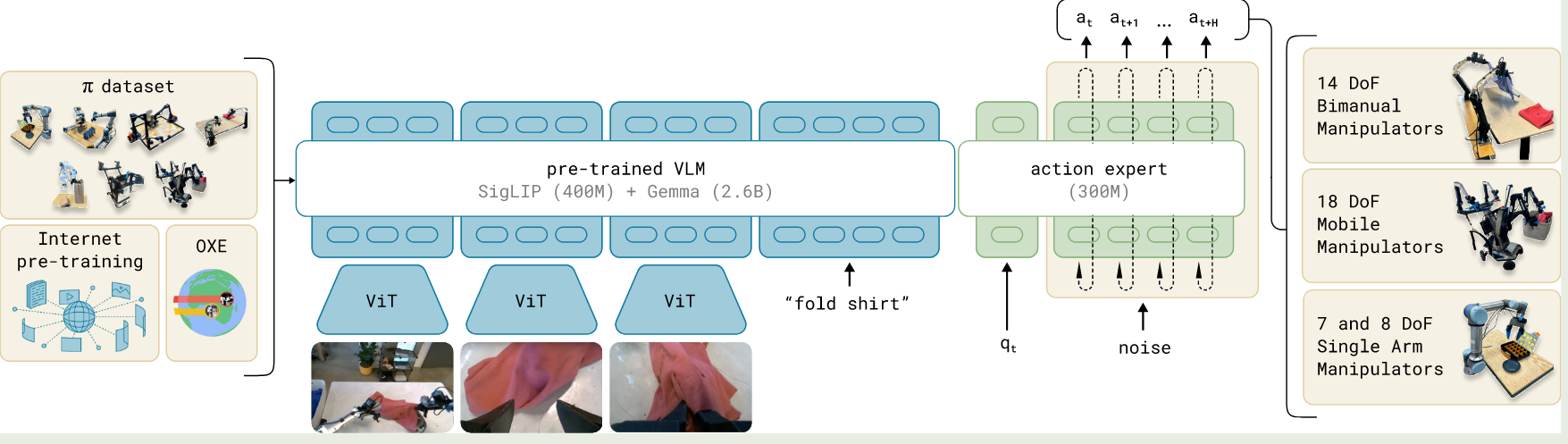
基于预训练VLM模型构建,充分利用训练好的VLM模型能力。使用多种类型的robot数据,包括单臂、双臂或者移动控制器等。
-
模型架构
- π 0 \pi0 π0 主要基于Transfusion改进,为了执行高度灵活和负责的物理任务,使用了基于flow matching的action chunking来表示复杂并连续的action分布,推理时可以输出多个未来action轨迹。离散输出使用cross-entropy loss,连续输出使用flow-matching loss。
- 为了充分整合VLM和flow matching,模型使用了轻量级MoE架构,增加了action expert,对于输入action token只能经过action expert。
-
简单介绍flow matching:
- Flow Matching 将生成建模视为一个连续动力系统:模型不再学习"如何去噪",而是学习在任意时间点上,从当前状态朝向真实数据分布应当移动的瞬时速度。
- 在训练阶段,Flow Matching 通过构造一条从噪声样本到真实样本的简单路径(通常是线性插值),并在路径上的任意时间点 t 计算出解析可得的真实速度方向。模型的目标就是:在给定当前状态和时间的条件下,预测一个速度向量,使其尽可能接近这条路径上的真实速度,从而实现对"理想流场"的匹配。在生成阶段,模型从随机噪声初始化,通过不断查询模型得到当前时刻的速度预测,并沿该方向进行微小更新。
- 传统 Diffusion 模型通过学习噪声或 score 来"逐步纠正偏差",而 Flow Matching 则直接学习"往哪走"。前者是离散、反向的去噪过程,后者是连续、正向的生成过程。这使得 Flow Matching 的训练目标更加直接,生成过程也更自然地对应连续时间动力系统。
-
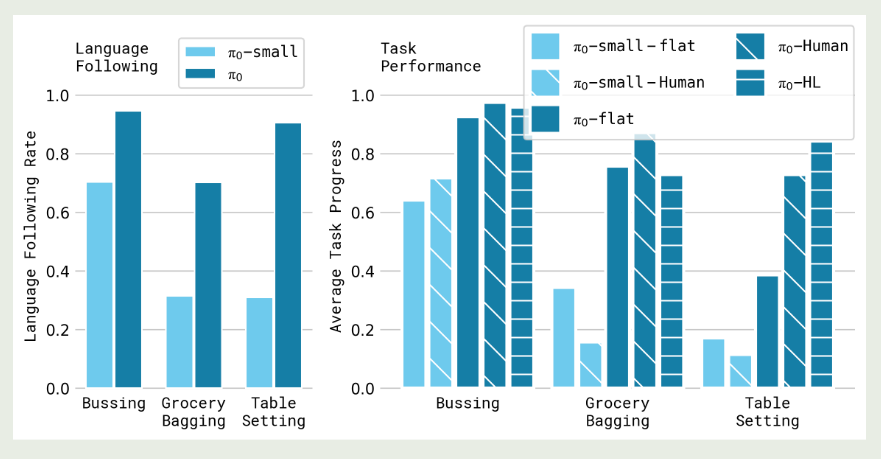
仅使用高质量数据训练无法让模型从错误中恢复,仅使用低质量数据无法让模型高效并鲁棒性运行,因此将二者结合起来,使模型兼具"模仿高质量数据行动"与"错误时运用恢复修正策略"的能力。
-
结果也是非常好: