
目录
[一、B 树的 "软肋":为什么需要 B + 树和 B * 树?](#一、B 树的 “软肋”:为什么需要 B + 树和 B * 树?)
[1.1 范围查询效率低](#1.1 范围查询效率低)
[1.2 关键字冗余存储](#1.2 关键字冗余存储)
[1.3 磁盘 IO 利用率不高](#1.3 磁盘 IO 利用率不高)
[1.4 顺序访问不友好](#1.4 顺序访问不友好)
[二、B + 树:为索引而生的 "进化版 B 树"](#二、B + 树:为索引而生的 “进化版 B 树”)
[2.1 B + 树的定义与核心特性](#2.1 B + 树的定义与核心特性)
[核心特性 1:所有关键字都存储在叶子节点](#核心特性 1:所有关键字都存储在叶子节点)
[核心特性 2:分支节点的子节点指针与关键字个数相同](#核心特性 2:分支节点的子节点指针与关键字个数相同)
[核心特性 3:叶子节点通过链表串联](#核心特性 3:叶子节点通过链表串联)
[核心特性 4:查找必达叶子节点](#核心特性 4:查找必达叶子节点)
[2.2 B + 树的结构示意图](#2.2 B + 树的结构示意图)
[2.3 B + 树的查找、插入与分裂流程](#2.3 B + 树的查找、插入与分裂流程)
[(3)分裂流程与 B 树的区别](#(3)分裂流程与 B 树的区别)
[2.4 B + 树的优势总结](#2.4 B + 树的优势总结)
[三、B * 树:空间利用率拉满的 "终极进化版"](#三、B * 树:空间利用率拉满的 “终极进化版”)
[3.1 B * 树的核心特性](#3.1 B * 树的核心特性)
[核心特性 1:兄弟节点指针优化分裂逻辑](#核心特性 1:兄弟节点指针优化分裂逻辑)
[核心特性 2:分裂策略更高效](#核心特性 2:分裂策略更高效)
[核心特性 3:继承 B + 树的所有优势](#核心特性 3:继承 B + 树的所有优势)
[3.2 B * 树的结构示意图](#3.2 B * 树的结构示意图)
[3.3 B * 树与 B + 树的对比](#3.3 B * 树与 B + 树的对比)
[四、B 树家族大比拼:B 树 vs B + 树 vs B * 树](#四、B 树家族大比拼:B 树 vs B + 树 vs B * 树)
[五、B 树家族的核心应用:MySQL 索引实战](#五、B 树家族的核心应用:MySQL 索引实战)
[5.1 索引的本质:为什么选择 B + 树?](#5.1 索引的本质:为什么选择 B + 树?)
[5.2 MyISAM 存储引擎的 B + 树索引实现(非聚集索引)](#5.2 MyISAM 存储引擎的 B + 树索引实现(非聚集索引))
[5.3 InnoDB 存储引擎的 B + 树索引实现(聚集索引)](#5.3 InnoDB 存储引擎的 B + 树索引实现(聚集索引))
[5.4 两种存储引擎索引实现的核心差异](#5.4 两种存储引擎索引实现的核心差异)
[5.5 实战建议:如何选择索引与存储引擎?](#5.5 实战建议:如何选择索引与存储引擎?)
[六、C++ 实现简易 B + 树(索引核心功能)](#六、C++ 实现简易 B + 树(索引核心功能))
[6.1 设计思路](#6.1 设计思路)
[6.2 代码实现](#6.2 代码实现)
[6.3 测试结果](#6.3 测试结果)
前言
在上一篇博客中,我们深入剖析了 B 树的设计精髓 ------ 通过 "多叉平衡" 结构降低树的高度,减少磁盘 IO 次数,完美解决了海量数据的外部存储检索问题。但在实际应用中,尤其是数据库、文件系统等场景,B 树却很少被直接使用,取而代之的是它的 "进化版"------B + 树和 B * 树。
你是否好奇:B 树已经如此高效,为什么还需要进一步优化?B + 树在 B 树的基础上做了哪些改进?今天,我们就来揭开这些谜底,带你打通从数据结构到数据库应用的任督二脉!下面就让我们正式开始吧!
一、B 树的 "软肋":为什么需要 B + 树和 B * 树?
B 树的核心优势是 "低高度、平衡、磁盘友好",但在实际应用中,它依然存在几个难以忽视的局限性,这些局限性成为了 B + 树和 B * 树诞生的契机。
1.1 范围查询效率低
B 树的关键字分散在各个节点中(根节点、分支节点、叶子节点都可能存储关键字),当需要进行范围查询时(比如 "查找所有大于 100 且小于 200 的关键字"),需要遍历整个树的多个分支,多次回溯,效率很低。
举个例子:在一棵 3 阶 B 树中查找 "50~150" 的关键字,需要先找到 50 所在的叶子节点,然后通过父节点指针回溯到分支节点,再向下遍历到 150 所在的叶子节点,整个过程涉及多次磁盘 IO,操作复杂。
1.2 关键字冗余存储
B 树的分支节点中存储了关键字,而这些关键字同样会出现在叶子节点中(或子树中),导致关键字的冗余存储。对于海量数据来说,这种冗余会占用大量的磁盘空间,增加存储成本。
1.3 磁盘 IO 利用率不高
B 树的每个节点同时存储关键字和子节点指针,且关键字的长度可能不固定(比如字符串类型),这会导致节点的大小难以精准匹配磁盘块大小。此外,分支节点中的关键字会占用部分空间,使得每个节点能存储的子节点指针数量减少,间接增加了树的高度,影响检索效率。
1.4 顺序访问不友好
B 树的叶子节点之间没有直接的关联,无法像链表一样进行高效的顺序访问。在需要遍历所有数据(比如全表扫描)时,只能从根节点开始逐层遍历,效率远低于链表式的顺序访问。
为了解决这些问题,B + 树应运而生。它在 B 树的基础上进行了针对性优化,完美适配了数据库、文件系统等场景的需求。而 B * 树则是 B + 树的进一步升级,在空间利用率上实现了更大的突破。
二、B + 树:为索引而生的 "进化版 B 树"
2.1 B + 树的定义与核心特性
B + 树是 B 树的变体,本质上是一棵平衡的多路搜索树,其设计初衷是为了优化索引的查询和存储效率。与 B 树相比,B + 树在结构上做了 4 点关键改进,形成了自己独有的特性:
核心特性 1:所有关键字都存储在叶子节点
B + 树的分支节点(根节点、非叶子节点)仅存储关键字和子节点指针,不存储数据记录;所有关键字及其对应的 data 都集中在叶子节点中,且叶子节点中的关键字按照从小到大的顺序排列。
这一设计解决了 B 树的关键字冗余问题 ------ 分支节点的关键字仅作为 "索引指引",无需存储重复数据,大幅节省了磁盘空间。
核心特性 2:分支节点的子节点指针与关键字个数相同
B 树的分支节点中,子节点指针个数 = 关键字个数 + 1;而 B + 树的分支节点中,子节点指针个数 = 关键字个数。
具体来说,B + 树分支节点的结构为:(K₁, P₁, K₂, P₂, ..., Kₙ, Pₙ),其中:
- Kᵢ 为关键字,且K₁ < K₂ < ... < Kₙ;
- Pᵢ 为子节点指针,指向的子树中所有关键字的取值范围是 [Kᵢ, Kᵢ₊₁)(对于最后一个指针 Pₙ,其指向的子树关键字 ≥ Kₙ)。
这种结构让分支节点的索引逻辑更清晰,每个指针对应的关键字范围更明确,查找时无需额外判断,效率更高。
核心特性 3:叶子节点通过链表串联
B + 树的所有叶子节点通过一个双向链表(或单向链表)连接起来,链表中的关键字保持有序。这一设计让范围查询和顺序访问变得极其高效:
- 范围查询:只需找到范围的起始关键字所在的叶子节点,然后通过链表依次遍历到范围的结束关键字,无需回溯父节点;
- 顺序访问:直接遍历叶子节点的链表即可,效率等同于链表的 O (N),但无需逐层遍历树结构。
核心特性 4:查找必达叶子节点
B + 树的查找过程中,无论目标关键字是否存在,最终都必须到达叶子节点。分支节点的关键字仅用于指引查找方向,不会在分支节点中 "命中" 数据。
这一特性保证了查找效率的稳定性 ------ 所有查找操作的磁盘 IO 次数都等于树的高度,不会出现 B 树中 "在分支节点命中" 的不确定情况,便于系统优化。
2.2 B + 树的结构示意图
为了更直观地理解 B + 树的结构,我们以一棵 3 阶 B + 树为例,结构如下:
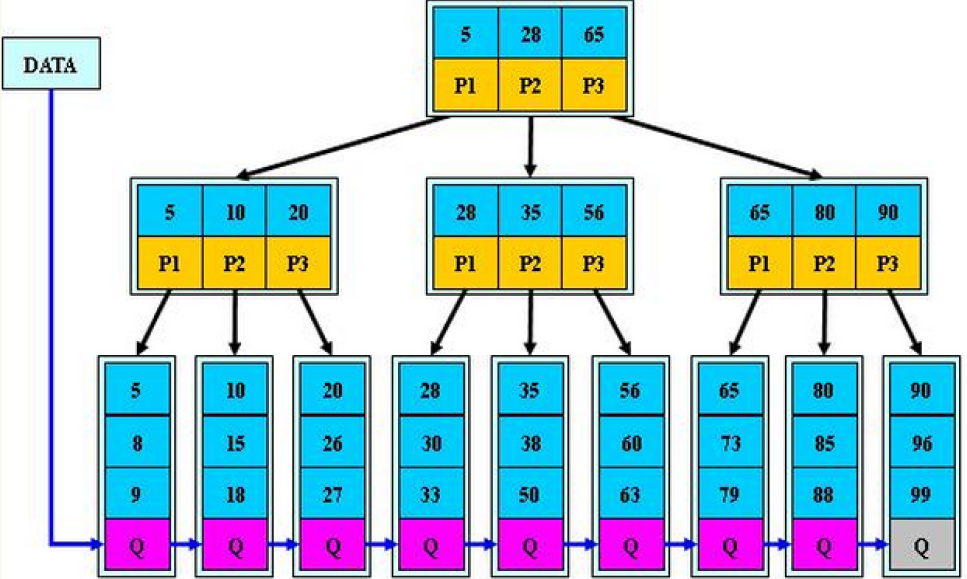 结构解读:
结构解读:
- 根节点 5, 28, 65:三个关键字,三个子节点指针,分别指向子树 [5, 10, 20) 、 [28, 35, 56)和[65, 80, 90);
- 分支节点 5, 10, 20:三个关键字,三个子节点指针,分别指向子树 [5, 8, 9) 、 [10, 15, 18)和[20, 26, 27);
- 叶子节点 5, 8, 9 、 10, 15, 18和20, 26, 27 等:存储关键字和对应数据,通过链表串联,链表顺序为 5→8→9→10→15→18→......→99。
2.3 B + 树的查找、插入与分裂流程
(1)查找流程
B + 树的查找过程与 B 树类似,但最终必须到达叶子节点:
- 从根节点开始,根据目标关键字 key 与当前节点关键字的比较结果,选择对应的子节点指针,进入下一层节点;
- 重复步骤 1,直到进入叶子节点;
- 在叶子节点的有序关键字中查找 key:
- 若找到,返回对应的 data;
- 若未找到,返回 "不存在"。
(2)插入流程
B + 树的插入核心原则:插入位置始终在叶子节点,插入后需保证叶子节点有序、链表连接正常,且节点关键字个数不超过 m-1(m 为阶数)。若节点满,则进行分裂。
插入流程步骤:
- 查找插入位置:通过 B + 树的查找逻辑,找到 key 应插入的叶子节点(若 key 已存在,根据业务需求处理,如覆盖或报错);
- 插入关键字:按照有序原则将 key 插入到叶子节点的对应位置,更新叶子节点的链表连接;
- 检测节点是否满:若叶子节点的关键字个数 ≤ m-1,插入成功;若等于 m,则需要分裂;
- 节点分裂 :
- 将叶子节点的关键字平均分成两部分(前半部分留在原节点,后半部分移入新节点);
- 新节点接入叶子节点的链表中(更新前后节点的链表指针);
- 将分裂后的中间关键字(通常是新节点的第一个关键字)插入到父分支节点中;
- 若父节点也满,则重复分裂流程,直到根节点(根节点分裂后树的高度加 1)。
(3)分裂流程与 B 树的区别
B + 树的分裂与 B 树的核心差异在于:
- B 树分裂时,中间关键字会从原节点移除,上升到父节点;
- B + 树分裂时,中间关键字会保留在原节点(叶子节点),仅将其副本插入到父节点中,保证所有关键字都集中在叶子节点。
这一差异是由 B + 树 "所有关键字存储在叶子节点" 的特性决定的,确保了分裂后不会丢失关键字。
2.4 B + 树的优势总结
对比 B 树,B + 树的核心优势如下:
| 对比维度 | B 树 | B + 树 |
|---|---|---|
| 范围查询 | 效率低,需多次回溯 | 效率高,叶子节点链表遍历 |
| 顺序访问 | 需逐层遍历树结构 | 直接遍历叶子节点链表 |
| 存储效率 | 关键字冗余,存储成本高 | 分支节点仅存索引,节省空间 |
| 查找稳定性 | 可能在分支节点命中,IO 次数不确定 | 必达叶子节点,IO 次数固定 |
| 数据一致性 | 关键字分散,维护成本高 | 数据集中在叶子节点,维护简单 |
正是这些优势,让 B + 树成为了数据库索引的 "首选数据结构"。
三、B * 树:空间利用率拉满的 "终极进化版"
B * 树是 B + 树的进一步优化,核心目标是提高节点的空间利用率 ,减少分裂次数,降低磁盘 IO 开销。它在 B + 树的基础上增加了一个关键设计:非根、非叶子节点增加指向兄弟节点的指针。
3.1 B * 树的核心特性
核心特性 1:兄弟节点指针优化分裂逻辑
B * 树的非根、非叶子节点除了存储关键字和子节点指针,还额外存储一个兄弟节点指针(通常是右兄弟指针)。这一设计让节点满时,优先尝试 "借空间" 而非 "分裂",大幅降低了分裂频率。
核心特性 2:分裂策略更高效
B + 树的节点满时,直接分裂为两个节点,各占一半数据;而 B * 树的分裂策略分为两步:
- 尝试向兄弟节点 "借空间":若当前节点满,且其右兄弟节点未满,则将当前节点的部分关键字移到兄弟节点中,同时更新父节点中对应关键字的范围(因为兄弟节点的关键字范围发生了变化);
- 兄弟节点也满时才分裂:若兄弟节点也满,则将当前节点和兄弟节点各拿出 1/3 的关键字,共同分裂出一个新节点,三个节点的关键字个数均为 2m/3 左右(m 为阶数)。
这种分裂策略有如下优势:
- 减少分裂次数:借空间操作无需创建新节点,比分裂更高效;
- 提高空间利用率 :B + 树分裂后节点的空间利用率为 50%,而 B * 树分裂后节点的空间利用率约为 66.7%,大幅节省磁盘空间;
- 降低树的高度:空间利用率高意味着每个节点能存储更多关键字,树的高度更低,磁盘 IO 次数更少。
核心特性 3:继承 B + 树的所有优势
B * 树完全继承了 B + 树的核心优势:
- 所有关键字存储在叶子节点;
- 叶子节点通过链表串联,支持高效范围查询;
- 查找必达叶子节点,效率稳定。
3.2 B * 树的结构示意图
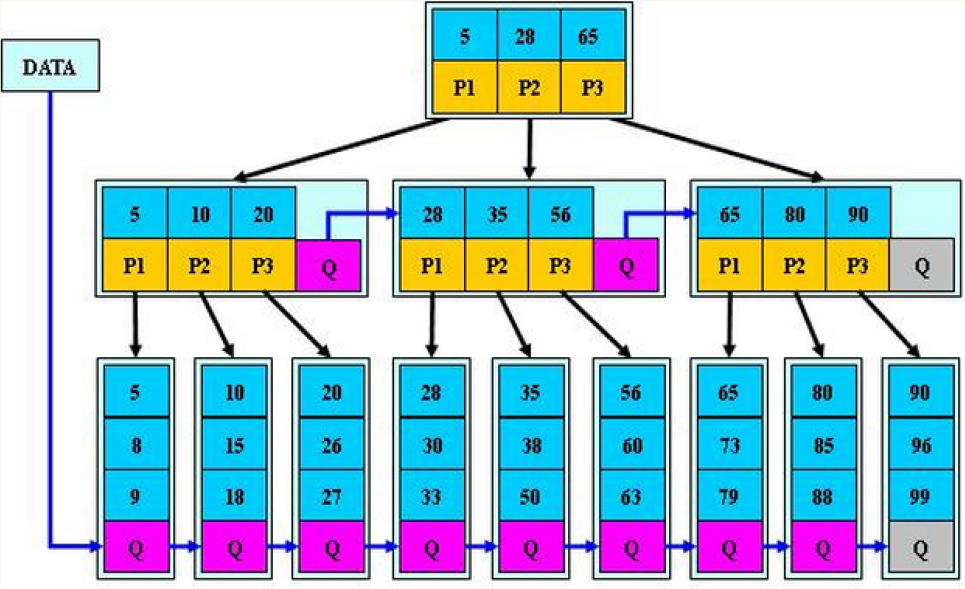
以 3 阶 B * 树为例,结构如下:
3.3 B * 树与 B + 树的对比
| 对比维度 | B + 树 | B * 树 |
|---|---|---|
| 节点结构 | 无兄弟指针 | 非根非叶子节点有兄弟指针 |
| 分裂策略 | 直接分裂为两个节点,各占 1/2 | 优先借空间,否则分裂为三个节点,各占 1/3 |
| 空间利用率 | 约 50% | 约 66.7% |
| 分裂频率 | 高 | 低 |
| 适用场景 | 读写均衡、范围查询频繁 | 写操作密集、空间资源紧张 |
B * 树的空间利用率更高,分裂次数更少,更适合写操作密集的场景(如高并发插入的数据库表);而 B + 树的实现更简单,读写均衡性更好,是更通用的索引选择。
四、B 树家族大比拼:B 树 vs B + 树 vs B * 树
为了让大家更清晰地梳理三者的关系和差异,我们用一张表格总结核心对比:
| 特性 | B 树 | B + 树 | B * 树 |
|---|---|---|---|
| 关键字存储位置 | 分支节点 + 叶子节点 | 仅叶子节点(分支节点存索引) | 仅叶子节点(分支节点存索引) |
| 子节点指针个数 | 关键字个数 + 1 | 关键字个数 | 关键字个数 |
| 叶子节点连接 | 无 | 双向链表 | 双向链表 |
| 查找终点 | 分支节点或叶子节点 | 必达叶子节点 | 必达叶子节点 |
| 范围查询效率 | 低 | 高 | 高 |
| 空间利用率 | 低(关键字冗余) | 中(分裂后 50%) | 高(分裂后 66.7%) |
| 分裂频率 | 中 | 高 | 低 |
| 核心优势 | 基础平衡多叉树,实现简单 | 范围查询高效,读写均衡 | 空间利用率高,分裂少 |
| 典型应用 | 少量外部存储场景 | 数据库索引(MyISAM、InnoDB)、文件系统 | 高并发写场景、大容量数据存储 |
一句话总结就是:B 树是基础,B + 树优化了查询和存储,B * 树优化了空间和分裂 ------ 三者都是为了适应外部存储场景,核心目标是减少磁盘 IO,提高检索效率。
五、B 树家族的核心应用:MySQL 索引实战
B + 树(及变种)最核心的应用场景就是数据库索引。MySQL 作为最流行的开源关系型数据库,其两大核心存储引擎(MyISAM、InnoDB)都采用 B + 树作为索引结构,但实现方式存在显著差异。
5.1 索引的本质:为什么选择 B + 树?
MySQL 官方对索引的定义是:索引是帮助 MySQL 高效获取数据的数据结构 。简单来说,索引就是 "数据的目录",其核心目标是减少数据查找时的磁盘 IO 次数。
选择 B + 树作为索引结构的核心原因:
- 低高度:B + 树是多路平衡树,高度通常在 2~4 层(对于 1 亿条数据,100 阶 B + 树的高度仅为 3 层),最多 3 次磁盘 IO 即可找到目标数据;
- 范围查询高效 :叶子节点链表让范围查询(如
WHERE id BETWEEN 100 AND 200)无需回溯,效率远超其他结构;- 顺序访问友好:全表扫描时直接遍历叶子节点链表,效率高于 B 树;
- 空间利用率高:分支节点仅存索引,不存数据,节省磁盘空间,能让每个节点存储更多关键字,进一步降低树高。
5.2 MyISAM 存储引擎的 B + 树索引实现(非聚集索引)
MyISAM 是 MySQL 5.5.8 版本之前的默认存储引擎,不支持事务、行锁,支持全文索引,其索引实现采用非聚集索引(又称 "二级索引"),核心特点是 "索引文件与数据文件分离"。
(1)索引结构
MyISAM 的索引文件(.MYI)和数据文件(.MYD)是两个独立的文件,索引结构如下:
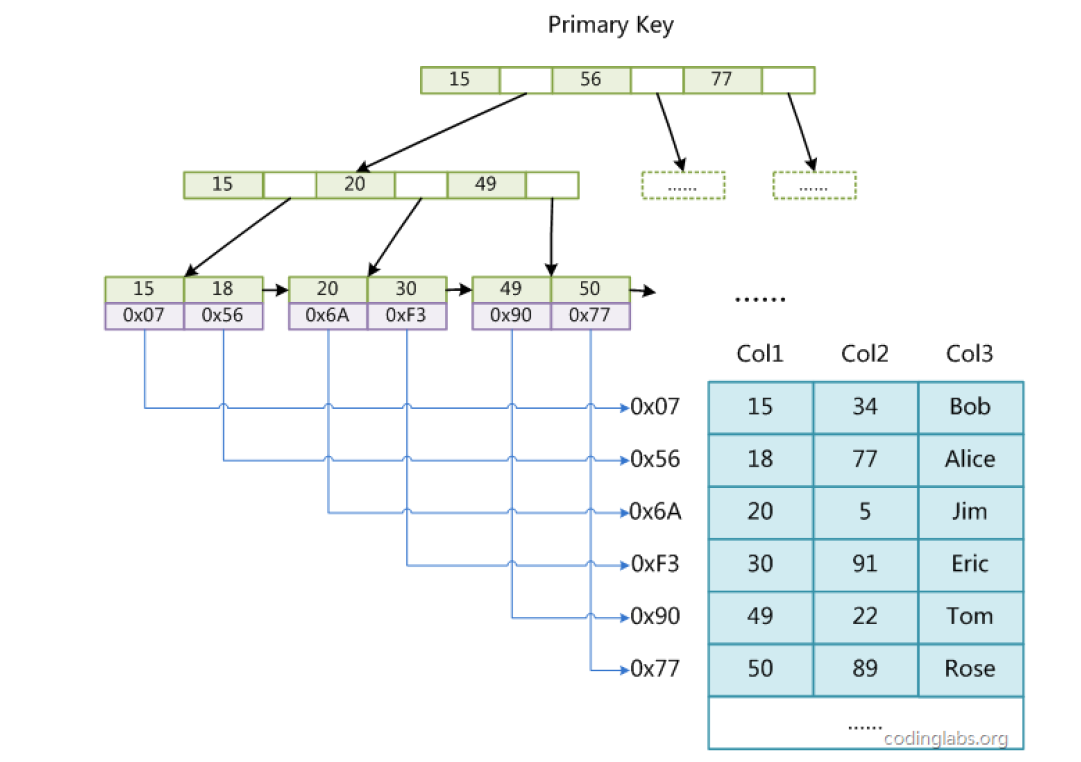
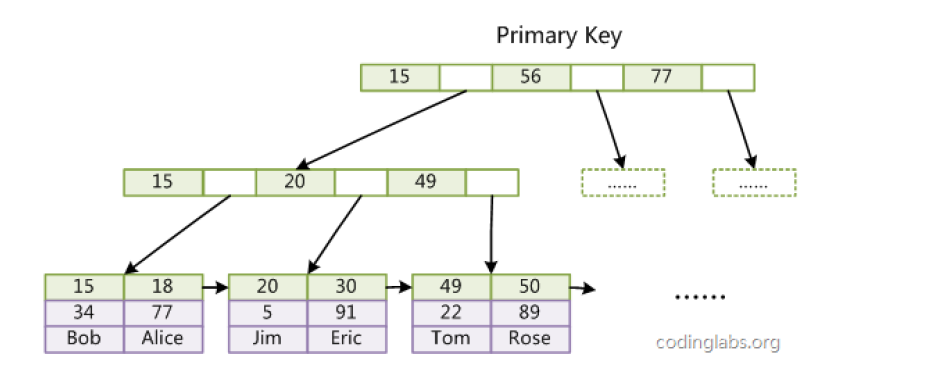
- 主索引(Primary Key) :B + 树结构,叶子节点的 data 域存储的是数据记录的物理地址(如磁盘块地址 0x07、0x56);
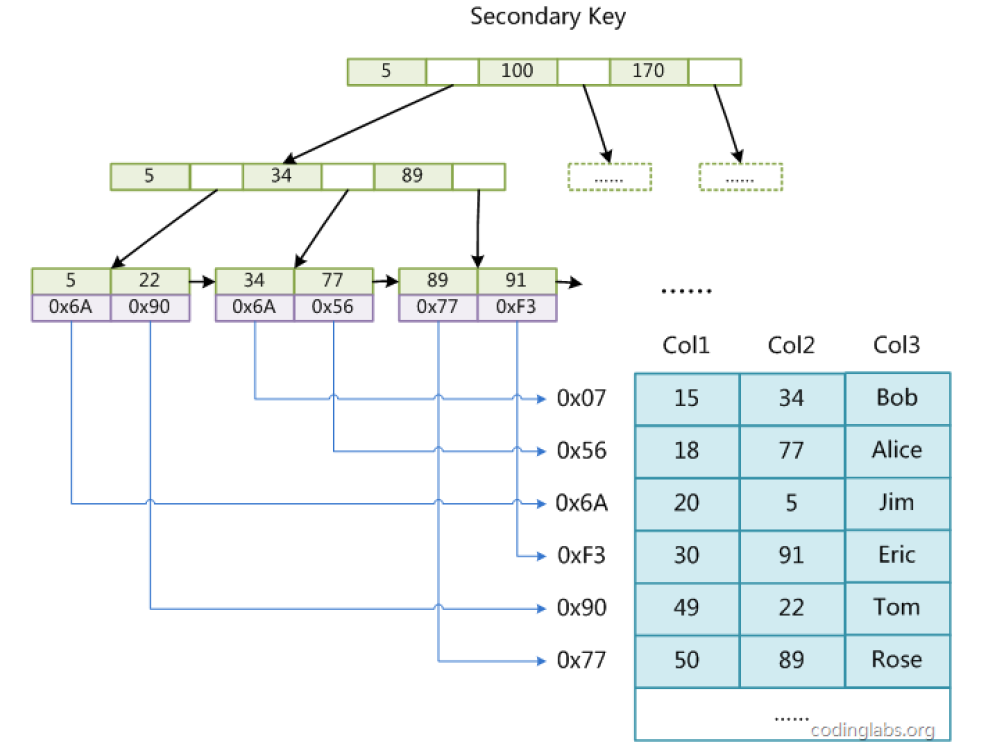
- 辅助索引(Secondary Key):与主索引结构完全一致,叶子节点的 data 域同样存储数据记录的物理地址,仅要求关键字可以重复(无需唯一)。
(2)主索引示意图
以Col1为主索引:
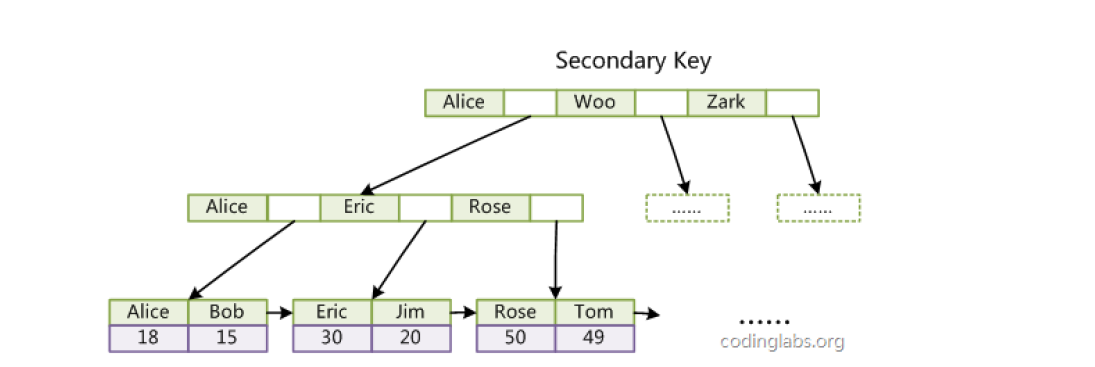
(3)辅助索引示意图
若在 Col2 上建立辅助索引,其结构如下:
(4)查询流程
以查询 SELECT * FROM user WHERE Col2 = 77 为例,MyISAM 的查询流程:
- 访问辅助索引(Col2)的 B + 树,查找 key=77,得到数据记录的物理地址 0x56;
- 直接通过物理地址访问数据文件(.MYD),读取地址 0x56 对应的数据记录(18, 77, Alice);
- 返回结果。
(5)核心特点
- 索引与数据分离,索引仅存储地址,结构简单;
- 主索引和辅助索引无本质区别,仅主索引要求关键字唯一;
- 查询时需要 "索引查找→地址访问" 两步,效率受磁盘地址访问速度影响;
- 不支持事务,崩溃后数据恢复困难。
5.3 InnoDB 存储引擎的 B + 树索引实现(聚集索引)
InnoDB 是 MySQL 5.5.8 版本之后的默认存储引擎,支持事务、行锁、外键,其索引实现采用聚集索引(Clustered Index),核心特点是 "数据文件本身就是索引文件"。
(1)核心设计理念
InnoDB 的核心设计:表数据文件(.ibd)本身就是一棵 B + 树,这棵树的叶子节点存储完整的数据记录,非叶子节点存储主键关键字和子节点指针。这意味着:
- 主索引就是数据文件,无需额外的索引文件;
- 所有数据记录都按照主键的顺序存储,主键的顺序就是数据的物理存储顺序。
(2)主索引(聚集索引)结构
沿用上面的数据,InnoDB 的主索引(以 Col1 为键)结构如下:
(3)辅助索引结构
InnoDB 的辅助索引与 MyISAM 的核心差异:辅助索引的叶子节点 data 域存储的是主键关键字,而非物理地址。
(4)查询流程
以查询SELECT * FROM user WHERE Col2 = 77为例,InnoDB 的查询流程("回表查询"):
- 访问辅助索引(Col2)的 B + 树,查找 key=77,得到对应的主键关键字 18;
- 访问主索引(聚集索引)的 B + 树,查找 key=18,得到完整的数据记录(18, 77, Alice);
- 返回结果。
(5)核心特点
- 主索引与数据文件合一,查询主键时无需回表,效率极高;
- 辅助索引依赖主键,查询时需要 "辅助索引→主索引" 两步(回表),效率略低于 MyISAM,但事务支持更完善;
- 数据按照主键顺序存储,主键的选择对性能影响极大(建议使用自增主键,避免插入时频繁分裂节点);
- 支持事务、行锁,崩溃后可通过事务日志恢复数据,可靠性更高。
5.4 两种存储引擎索引实现的核心差异
| 对比维度 | MyISAM | InnoDB |
|---|---|---|
| 索引类型 | 非聚集索引 | 聚集索引 |
| 索引与数据关系 | 索引文件与数据文件分离 | 数据文件本身就是主索引 |
| 主索引 data 域 | 物理地址 | 完整数据记录 |
| 辅助索引 data 域 | 物理地址 | 主键关键字 |
| 查询流程 | 索引查找→地址访问(一步) | 辅助索引→主索引(回表,两步) |
| 主键要求 | 可选,无强制要求 | 必须有主键(无显式则自动生成) |
| 事务支持 | 不支持 | 支持 |
| 锁粒度 | 表锁 | 行锁 |
| 崩溃恢复 | 困难 | 支持(通过 redo/undo 日志) |
5.5 实战建议:如何选择索引与存储引擎?
- 优先使用 InnoDB:支持事务、行锁,数据可靠性更高,适合大多数业务场景(如电商、金融、社交);
- 主键设计 :使用自增整数主键,避免使用字符串或随机数主键 ------ 自增主键能保证插入时数据顺序存储,减少节点分裂,提高插入效率;
- 辅助索引优化:避免过度创建辅助索引(每个辅助索引都会占用磁盘空间,且插入 / 更新时需要维护),针对频繁查询的字段建立索引;
- 范围查询优化:利用 B + 树的叶子节点链表特性,对于范围查询(如时间范围、数值范围),尽量使用主键或辅助索引的有序字段,减少回表次数。
六、C++ 实现简易 B + 树(索引核心功能)
为了让大家更深入地理解 B + 树的实现逻辑,我们用 C++ 编写一个简易的 B + 树模板类,实现核心的插入、查找、范围查询功能。
6.1 设计思路
- 节点类型:分为分支节点(非叶子节点)和叶子节点,采用继承体系实现;
- 关键字类型:模板参数 K,支持任意可比较类型;
- 数据存储:叶子节点存储 <K, V> 键值对,分支节点存储 <K, 子节点指针 >;
- 链表连接:叶子节点通过双向链表串联,支持范围查询;
- 核心功能:Insert(插入)、Find(单值查找)、RangeFind(范围查询)。
6.2 代码实现
cpp
#include <iostream>
#include <vector>
#include <utility>
#include <algorithm>
#include <cassert>
using namespace std;
// 前向声明
template <class K, class V, int M = 3>
class BPlusTree;
// 节点基类
template <class K, class V, int M>
struct BPlusTreeNode {
BPlusTreeNode() : _parent(nullptr) {}
virtual ~BPlusTreeNode() {}
BPlusTreeNode<K, V, M>* _parent; // 父节点指针
size_t _size; // 关键字个数
};
// 叶子节点
template <class K, class V, int M>
struct BPlusTreeLeafNode : public BPlusTreeNode<K, V, M> {
pair<K, V> _data[M]; // 存储键值对,最多M个
BPlusTreeLeafNode<K, V, M>* _prev; // 前驱叶子节点
BPlusTreeLeafNode<K, V, M>* _next; // 后继叶子节点
BPlusTreeLeafNode() : _prev(nullptr), _next(nullptr) {
this->_size = 0;
this->_parent = nullptr;
}
// 查找key在叶子节点中的位置,返回索引(未找到返回-1)
int FindKey(const K& key) {
for (size_t i = 0; i < this->_size; ++i) {
if (_data[i].first == key) {
return i;
}
}
return -1;
}
// 插入键值对,返回插入位置
int Insert(const pair<K, V>& kv) {
int end = this->_size - 1;
// 有序插入(插入排序逻辑)
while (end >= 0 && kv.first < _data[end].first) {
_data[end + 1] = _data[end];
--end;
}
_data[end + 1] = kv;
++this->_size;
return end + 1;
}
};
// 分支节点(非叶子节点)
template <class K, class V, int M>
struct BPlusTreeBranchNode : public BPlusTreeNode<K, V, M> {
K _keys[M]; // 关键字,最多M个
BPlusTreeNode<K, V, M>* _children[M]; // 子节点指针,最多M个
BPlusTreeBranchNode() {
this->_size = 0;
this->_parent = nullptr;
for (size_t i = 0; i < M; ++i) {
_children[i] = nullptr;
}
}
// 查找key对应的子节点指针索引
int FindChildIndex(const K& key) {
int index = this->_size - 1;
while (index >= 0 && key < _keys[index]) {
--index;
}
return index + 1; // 返回子节点指针索引
}
// 插入关键字和对应的子节点指针
void Insert(const K& key, BPlusTreeNode<K, V, M>* child) {
int end = this->_size - 1;
while (end >= 0 && key < _keys[end]) {
_keys[end + 1] = _keys[end];
_children[end + 1] = _children[end];
--end;
}
_keys[end + 1] = key;
_children[end + 1] = child;
child->_parent = this;
++this->_size;
}
};
// B+树模板类
template <class K, class V, int M = 3>
class BPlusTree {
typedef BPlusTreeNode<K, V, M> Node;
typedef BPlusTreeLeafNode<K, V, M> LeafNode;
typedef BPlusTreeBranchNode<K, V, M> BranchNode;
public:
BPlusTree() : _root(nullptr) {}
~BPlusTree() {
Destroy(_root);
}
// 插入键值对
bool Insert(const K& key, const V& value) {
// 树为空,创建根节点(叶子节点)
if (_root == nullptr) {
_root = new LeafNode;
static_cast<LeafNode*>(_root)->Insert(make_pair(key, value));
return true;
}
// 查找插入位置(叶子节点)
LeafNode* leaf = FindLeafNode(key);
// 关键字已存在,插入失败
if (leaf->FindKey(key) != -1) {
cout << "Key " << key << " already exists!" << endl;
return false;
}
// 插入到叶子节点
leaf->Insert(make_pair(key, value));
// 检查叶子节点是否满
if (leaf->_size < M) {
return true;
}
// 叶子节点满,需要分裂
SplitLeafNode(leaf);
return true;
}
// 查找关键字对应的value,找到返回true,否则返回false
bool Find(const K& key, V& value) {
if (_root == nullptr) {
return false;
}
LeafNode* leaf = FindLeafNode(key);
int index = leaf->FindKey(key);
if (index == -1) {
return false;
}
value = leaf->_data[index].second;
return true;
}
// 范围查询:查找[key1, key2]之间的所有键值对
vector<pair<K, V>> RangeFind(const K& key1, const K& key2) {
vector<pair<K, V>> result;
if (_root == nullptr) {
return result;
}
// 找到key1所在的叶子节点
LeafNode* leaf = FindLeafNode(key1);
while (leaf != nullptr) {
// 遍历当前叶子节点的关键字
for (size_t i = 0; i < leaf->_size; ++i) {
K currentKey = leaf->_data[i].first;
if (currentKey > key2) {
goto END; // 超出范围,退出
}
if (currentKey >= key1) {
result.push_back(leaf->_data[i]);
}
}
// 遍历下一个叶子节点
leaf = leaf->_next;
}
END:
return result;
}
// 中序遍历(验证B+树有序性)
void InOrder() {
InOrder(_root);
cout << endl;
}
private:
// 递归中序遍历
void InOrder(Node* root) {
if (root == nullptr) {
return;
}
BranchNode* branch = dynamic_cast<BranchNode*>(root);
if (branch != nullptr) {
// 分支节点:遍历子节点
for (size_t i = 0; i < branch->_size; ++i) {
InOrder(branch->_children[i]);
cout << branch->_keys[i] << " ";
}
InOrder(branch->_children[branch->_size]);
return;
}
// 叶子节点:输出关键字
LeafNode* leaf = dynamic_cast<LeafNode*>(root);
for (size_t i = 0; i < leaf->_size; ++i) {
cout << leaf->_data[i].first << " ";
}
}
// 查找key对应的叶子节点
LeafNode* FindLeafNode(const K& key) {
Node* cur = _root;
while (true) {
BranchNode* branch = dynamic_cast<BranchNode*>(cur);
if (branch == nullptr) {
// 到达叶子节点
return static_cast<LeafNode*>(cur);
}
// 分支节点,查找子节点索引
int index = branch->FindChildIndex(key);
cur = branch->_children[index];
}
}
// 分裂叶子节点
void SplitLeafNode(LeafNode* leaf) {
// 创建新的叶子节点
LeafNode* newLeaf = new LeafNode;
// 分裂点:中间位置,前半部分留在原节点,后半部分移入新节点
int mid = M / 2;
for (int i = mid; i < leaf->_size; ++i) {
newLeaf->_data[newLeaf->_size++] = leaf->_data[i];
}
// 更新原节点的关键字个数
leaf->_size = mid;
// 更新叶子节点的链表连接
newLeaf->_prev = leaf;
newLeaf->_next = leaf->_next;
if (leaf->_next != nullptr) {
leaf->_next->_prev = newLeaf;
}
leaf->_next = newLeaf;
// 向上插入中间关键字到父节点
K midKey = newLeaf->_data[0].first;
InsertToParent(leaf, midKey, newLeaf);
}
// 向上插入关键字到父节点
void InsertToParent(Node* leftChild, const K& key, Node* rightChild) {
Node* parent = leftChild->_parent;
// 父节点为空(原节点是根节点),创建新的根节点(分支节点)
if (parent == nullptr) {
BranchNode* newRoot = new BranchNode;
newRoot->Insert(key, rightChild);
newRoot->_children[0] = leftChild;
leftChild->_parent = newRoot;
rightChild->_parent = newRoot;
newRoot->_size = 1;
_root = newRoot;
return;
}
// 父节点是分支节点,插入关键字和子节点
BranchNode* branchParent = dynamic_cast<BranchNode*>(parent);
branchParent->Insert(key, rightChild);
// 检查父节点是否满
if (branchParent->_size < M) {
return;
}
// 父节点满,分裂分支节点
SplitBranchNode(branchParent);
}
// 分裂分支节点
void SplitBranchNode(BranchNode* branch) {
// 创建新的分支节点
BranchNode* newBranch = new BranchNode;
// 分裂点:中间位置,前半部分留在原节点,后半部分移入新节点
int mid = M / 2;
K midKey = branch->_keys[mid]; // 上升到父节点的关键字
// 搬移关键字和子节点指针
for (int i = mid + 1; i < branch->_size; ++i) {
newBranch->_keys[newBranch->_size] = branch->_keys[i];
newBranch->_children[newBranch->_size] = branch->_children[i];
newBranch->_children[newBranch->_size]->_parent = newBranch;
++newBranch->_size;
}
// 搬移最后一个子节点指针
newBranch->_children[newBranch->_size] = branch->_children[branch->_size];
if (newBranch->_children[newBranch->_size] != nullptr) {
newBranch->_children[newBranch->_size]->_parent = newBranch;
}
// 更新原节点的关键字个数
branch->_size = mid;
// 向上插入中间关键字到父节点
InsertToParent(branch, midKey, newBranch);
}
// 销毁树(递归释放节点)
void Destroy(Node* root) {
if (root == nullptr) {
return;
}
BranchNode* branch = dynamic_cast<BranchNode*>(root);
if (branch != nullptr) {
for (size_t i = 0; i <= branch->_size; ++i) {
Destroy(branch->_children[i]);
}
}
delete root;
root = nullptr;
}
private:
Node* _root; // B+树根节点
};
// 测试代码
int main() {
// 创建3阶B+树(叶子节点最多存储2个键值对)
BPlusTree<int, string, 3> bpt;
// 插入测试数据
bpt.Insert(5, "Jim");
bpt.Insert(10, "Tom");
bpt.Insert(20, "Alice");
bpt.Insert(28, "Bob");
bpt.Insert(35, "Eric");
bpt.Insert(56, "Rose");
bpt.Insert(65, "Lily");
bpt.Insert(80, "Jack");
bpt.Insert(90, "Lucy");
// 中序遍历(预期输出:5 10 20 28 35 56 65 80 90)
cout << "B+树中序遍历结果:";
bpt.InOrder();
// 单值查找
string value;
if (bpt.Find(28, value)) {
cout << "Find key=28, value=" << value << endl;
} else {
cout << "Key=28 not found!" << endl;
}
// 范围查询(key=20~65)
vector<pair<int, string>> rangeResult = bpt.RangeFind(20, 65);
cout << "RangeFind [20, 65] result:";
for (auto& kv : rangeResult) {
cout << "(" << kv.first << ", " << kv.second << ") ";
}
cout << endl;
// 插入重复关键字
bpt.Insert(28, "Bob2");
return 0;
}6.3 测试结果
运行测试代码后,输出如下:
B+树中序遍历结果:5 10 20 28 35 56 65 80 90
Find key=28, value=Bob
RangeFind [20, 65] result:(20, Alice) (28, Bob) (35, Eric) (56, Rose) (65, Lily)
Key 28 already exists!测试结果说明:
- 中序遍历结果有序,验证了 B + 树的关键字有序性;
- 单值查找能正确找到对应的 value;
- 范围查询能高效返回指定区间的键值对;
- 重复关键字插入失败,符合索引唯一性要求。
总结
从 B 树到 B + 树,再到 B * 树,每一次进化都是为了更好地适应外部存储场景的需求 ------ 核心目标始终是 "减少磁盘 IO、提高检索效率、优化空间利用率"。而 MySQL 的索引实现,则是将这些数据结构理论与实际业务场景深度结合的典范。
数据结构是程序的骨架,而 B 树家族则是骨架中最坚硬的部分之一。掌握它们的设计原理与应用场景,不仅能帮助你在面试中脱颖而出,更能让你在实际开发中写出更高效、更可靠的代码。如果你有任何疑问或想要深入探讨某个知识点,欢迎在评论区留言交流~