具身机械主义解释框架(立论):具身机械主义的解释框架 ------ 一种关于具身智能的规范性说明
一、 具身机械主义在 L3 的落地定义
L3 的"具身智能"源自 一个机制化的运营认知体:用事件驱动的状态估计与意图对齐,在护栏约束下生成可验证的段级行动,并用证据链闭环塑形世界模型与策略。
二、 核心要素(按"具身---机制---治理"组织)
(1) 具身锚点:感知接口与行动接口(Embodied Anchors)
• 感知锚点(Observe Anchors) :来自 L2/L2.5 的事实事件(状态/测量/报警/产出/质检)
• 行动锚点(Act Anchors) :对 L2.5 下发的段级命令、放行/hold、派工、配方片段
• 锚点要求 :每个锚点都必须可定位、可权限化、可度量、可追溯
(2) 世界模型(World Model)= 对象本体 + 能力模型 + 关系图谱
• 资产/工位/设备、物料/WIP、工单/批次、段/工序、人员/资质
• Capability(能力) :资源"能做什么 + 边界条件"
• 关系:订单→批次→段→资源→物料→质检点→能耗点
(3) 事件源化与回放(Event Sourcing & Replay)
• Fact/Business/Decision/Command/Evidence 五类事件
• 任何"状态"都能从事件回放重建(可审计、可复盘、可仿真)
(4) 状态估计器(State Estimator)
• 把碎片事件汇聚成:工单状态、段状态、资源状态、质量门状态、能耗/环境态
• 明确"置信度/缺失数据"机制(制造现场常态)
(5) 意图层(Intent Layer)
• 计划意图(交期/节拍/产量承诺)
• 工艺意图(配方/参数窗/路径/版本)
• 质量意图(规格、质量门、放行策略)
• 能耗/安全/合规意图(约束与策略)
(6) 偏差与耦合(Mismatch & Coupling Diagnostics)
• 意图 vs 现实的偏差检测(进度、工艺窗口、质量、资源、能耗)
• 偏差要输出:影响范围、紧迫度、候选处置、需要的人类授权等级
(7) 计划---承诺机制(Plan ↔ Commitment)
• 把"计划"与"承诺"分离:计划可变,承诺需治理
• 支持 Re-plan/Re-commit 的证据链与审批链(避免暗箱改计划)
(8) 段级执行机制(Segment Runtime / Orchestration)
• 核心是段/工序状态机
• 能驱动:启动、暂停、恢复、hold、终止、返工、切换版本
• 与 L2.5 协同:局部闭环由 L2.5 完成,L3 管意图与验收
(9) 可验证行动:SegmentCommand(Action with Acceptance Criteria)
每个段级命令必须包含:
• 参数目标值 + 参数边界(guardrail envelope)
• 前置条件(preconditions:资源/物料/安全联锁)
• 验收标准(acceptance criteria:质量/时间/能耗/曲线特征)
• 回执协议(acks/timeouts/retries)与失败语义
没有"验收标准"的命令不算具身闭环,只是"建议"。
(10) 护栏与责任边界(Policy & Responsibility Boundary)
• 权限、审批、互锁策略、版本化规则、自动化等级
• 明确:哪些动作可自动、哪些需人批准、哪些永不自动
• 护栏评估要"可解释 + 可签名 + 可追溯"
(11) 证据链与审计账本(Evidence Ledger)
• 事件 → 状态 → 决策 → 命令 → 结果 → 审批/签名
• 记录:谁、何时、依据什么版本的配方/策略/模型做了什么
• 目标:可回放的责任归因 (治理核心)
(12) 学习与演化(Learning as Mechanism Evolution)
• AI/优化的角色:建议与评估 (不直接越权执行)
• 学习内容:参数窗优化、异常归因、计划风险评估、质量预测
• 学习产物要落到:策略版本/配方版本/runbook 版本(进入治理体系)
三、 L3 " 具身智能 " 架构核心原则:
• 状态来自证据,不来自手填字段
• 行动必须可验收,否则不闭环
• 护栏是身体的一部分,不是附属模块
• AI 只能建议,决策必须可治理可签名
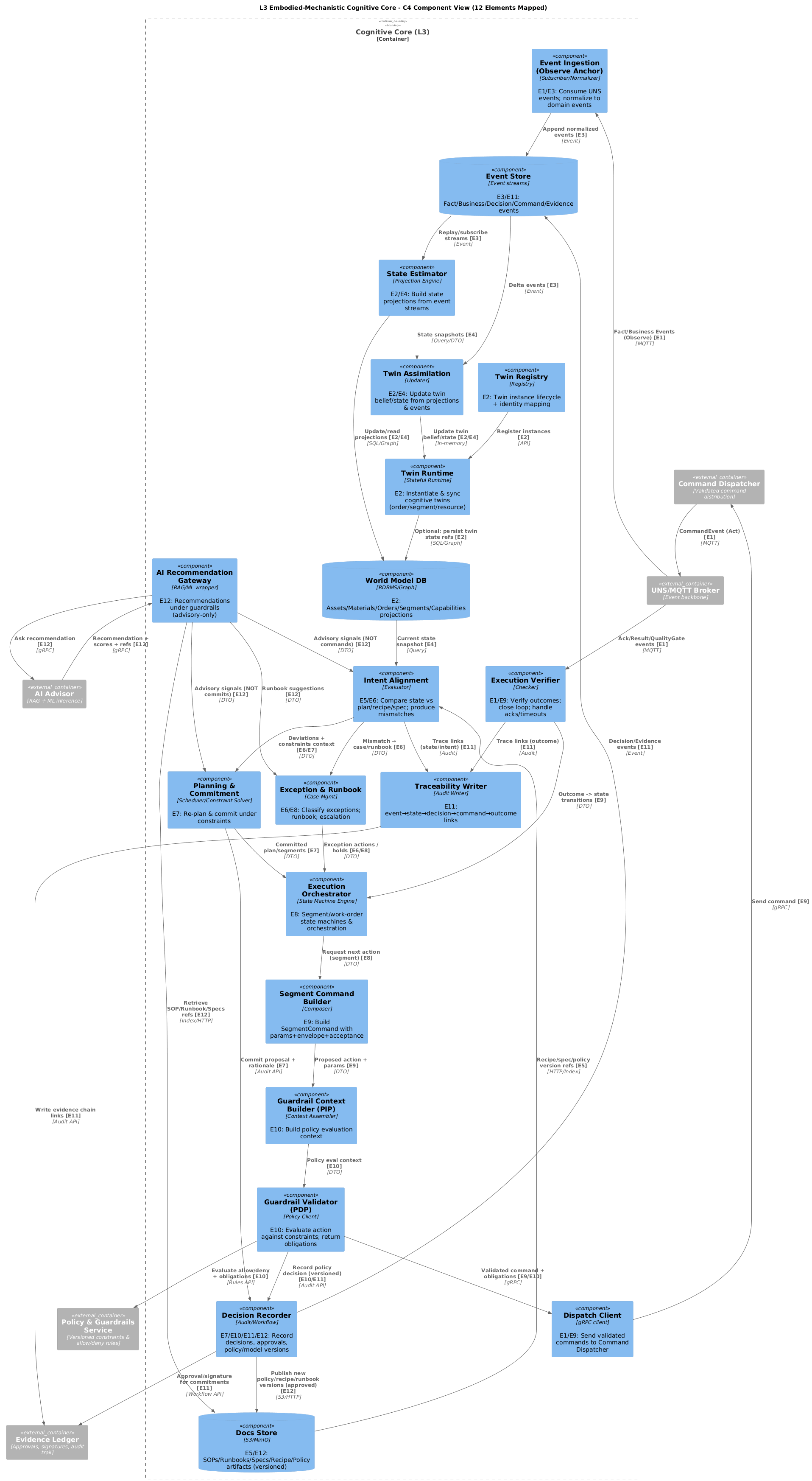
四、 C4 12要素组件图
重点改动:加了 Twin Runtime(认知孪生运行时,承载"活体实例")明确 Policy Decision Point (PDP)/Policy Information Point (PIP) 的职责强化 Evidence Writer 与 Traceability Writer 的证据链落点在关系线上标注对应要素编号(E1...E12)