一、UART是什么?
UART(通用异步收发传输器)是一种异步串行通信接口,常用于嵌入式系统和计算机之间传输数据。 它结构简单、稳定可靠,是嵌入式开发中最重要的调试和外接模块的接口之一。
串口的主要用途:
打印调试信息(如通过串口助手查看程序输出)。
连接外设模块:GPS、蓝牙、Wi-Fi、GSM模块等。
设备间通信:两个嵌入式设备之间的数据传输。
二、串口的基本连接方式

只需要三根线即可通信:
1、TxD:发送数据线
2、RxD:接收数据线
3、GND:地线(统一电平参考)
三、串口的通信参数(必须一致才能通信)
1、波特率 表示每秒传输的比特数(bps),常见值:9600、19200、115200等。
2、起始位 每帧数据的开始标志,固定为1个比特的低电平。
3、数据位 实际要传输的数据,一般为5~8位,如ASCII码(7位)。
4、校验位(可选) 用于检测数据传输是否正确,常见有奇校验或偶校验。
5、停止位 表示一帧数据的结束,通常为1~2位高电平。
四、数据传输示例(以发送字符'A'为例)
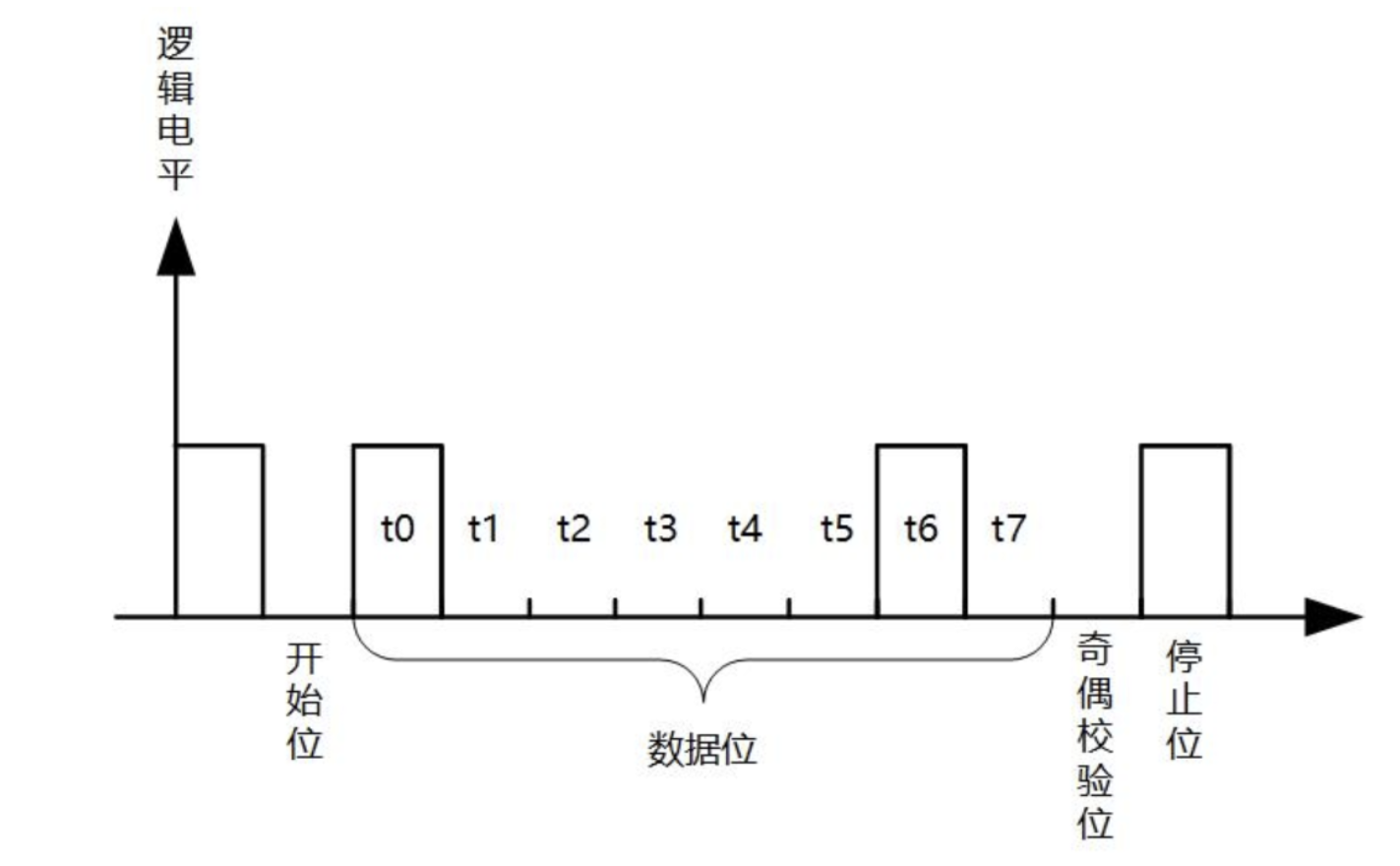
'A'的ASCII值为 0x41,二进制为 01000001。 传输过程:
1、发送方先拉低电平1位时间(起始位)。
2、接收方检测到低电平后开始计时。
3、依次发送8位数据(从最低位开始)。
4、最后发送停止位(高电平)。
五、串口电平标准(重要!)
UART通信有两种常见的电平标准:
| 电平标准 | 逻辑1电压范围 | 逻辑0电压范围 | 特点 |
|---|---|---|---|
| TTL/CMOS | 高电平(如3.3V/5V) | 低电平(如0V) | 常用在芯片内部或短距离通信 |
| RS-232 | -12V ~ -3V | +3V ~ +12V | 抗干扰强,适合工业、长距离通信 |
注意:
-
大多数ARM芯片的串口是TTL电平。
-
如果连接PC的RS-232串口,需要使用电平转换芯片(如MAX232)。
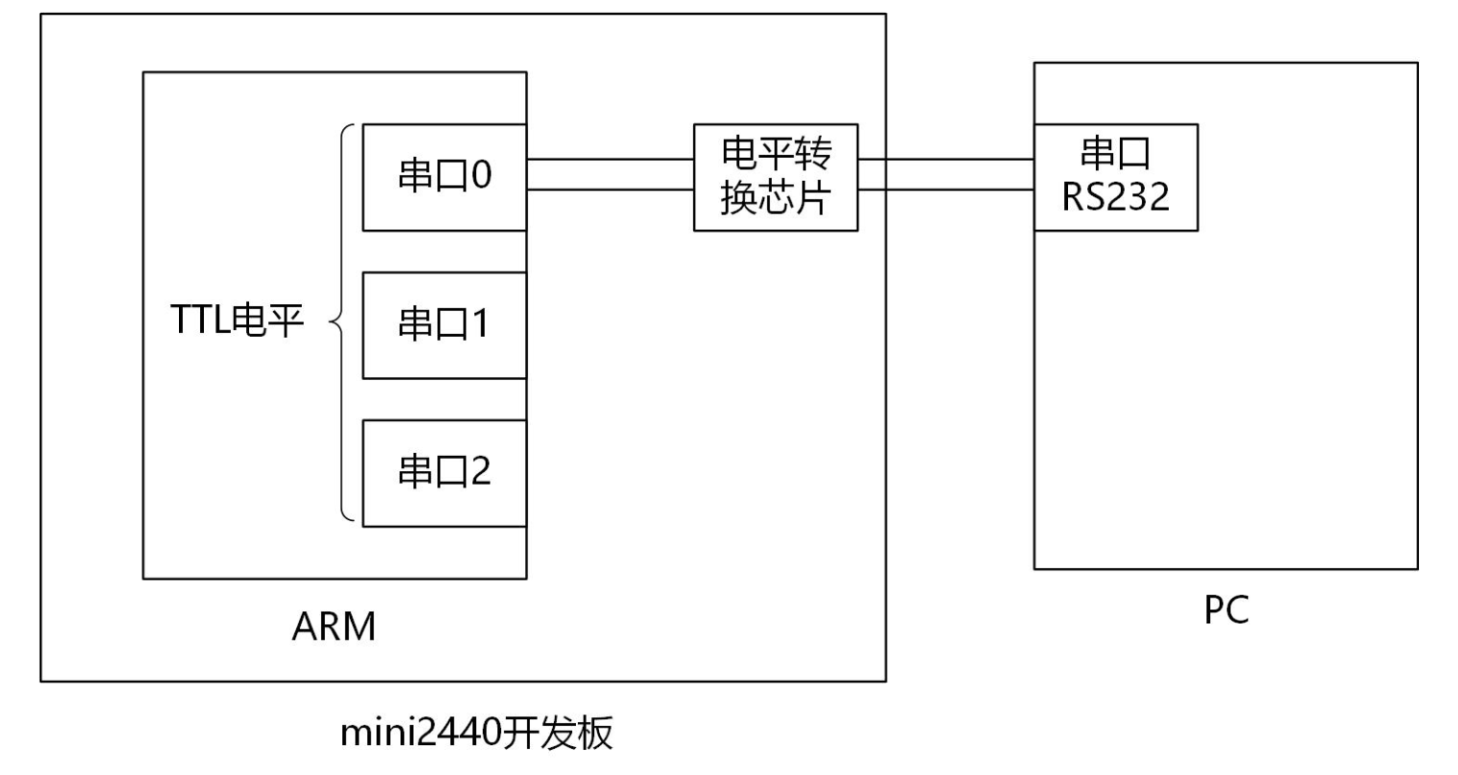
- 现在多数PC没有串口接口 ,常用USB转TTL串口模块(如CH340、CP2102)通过USB连接。

- 多数ARM芯片有多个串口,一般串口0用于调试,其他串口用于外接模块。
六、TTY/终端/控制台/串口到底是什么?
这些术语看起来很相似,但实际上有不同的含义:
| 术语 | 含义 | 简单理解 |
|---|---|---|
| TTY | Teletype(电传打字机)的缩写,现在是Linux内核中的一套驱动系统 | 历史遗留的名字,现在泛指Linux中处理字符输入输出的子系统 |
| Terminal | 终端,指输入输出设备(键盘+显示器),可能是真实的也可能是虚拟的 | 你与计算机交互的"窗口" |
| Console | 控制台,是一种特殊的终端,有更高权限(能看到内核消息) | 系统管理员的"超级终端" |
| UART | 串口硬件接口,TTY子系统的一部分 | 物理的串行通信接口,用于连接外部设备 |
七、设备节点详解(/dev目录下的文件)
Linux中"一切都是文件",设备也被抽象成文件。下面是常见TTY设备节点的区别:
1、串口设备节点
-
/dev/ttyS0、/dev/ttyS1... 标准串口设备(如COM1、COM2)
-
/dev/ttySAC0、/dev/ttySAC1... 某些ARM平台特定的串口命名
用途 :连接真实的串口设备,如通过USB转串口线连接开发板(串口没有虚拟终端的概念,一个设备节点就对应一个真实的硬件)。
实际开发中:嵌入式常用串口作为控制台,PC常用虚拟终端作为控制台
2、虚拟终端设备节点
- /dev/tty1、/dev/tty2、/dev/tty3... 虚拟终端(按Ctrl+Alt+F1~F6切换的就是这些)
特点:
-
每个对应一个独立的登录会话
-
一套键盘显示器模拟多个独立终端(多个设备节点对应一个真实的硬件)
-
即使没有图形界面也能使用多个"命令行窗口"
3、特殊设备节点
| 设备节点 | 含义 | 示例 |
|---|---|---|
| /dev/tty0 | 前台终端:当前正在显示的虚拟终端 | 切换tty1→tty2,/dev/tty0就从tty1变成tty2 |
| /dev/tty | 当前进程的终端:程序自身所在的终端,不会随前台切换改变 | 在tty3运行的程序,无论前台切到哪个终端,它的/dev/tty始终是tty3 |
| /dev/console | 控制台 :接收内核消息的设备,由内核启动参数console=指定 |
可以是串口(console=ttyS0)或虚拟终端(console=tty0) |
八、重要概念澄清
1、终端 vs 控制台
-
所有控制台 都是终端
-
但并非所有终端 都是控制台
-
控制台能看到内核消息(如系统启动时的打印)
-
可以通过内核参数选择哪个设备作为控制台
2、内核参数 "console="
系统启动时可以指定:
bash
# 让串口ttyS0作为控制台(嵌入式常用)
console=ttyS0,115200
# 让第一个虚拟终端作为控制台(PC常用)
console=tty0
# 可以指定多个,只有最后一个生效
console=ttyS0 console=tty0 # tty0生效3、图形界面下的终端
-
在图形界面(如Ubuntu桌面)打开的终端窗口
-
不是**
/dev/ttyN** ,而是**/dev/pts/N**(伪终端) -
原理类似,但实现方式不同
九、实际应用场景
场景1:嵌入式开发调试
-
开发板通过串口连接电脑
-
内核参数设置 console=ttyS0
-
系统启动信息、printk打印都从串口输出
-
开发者通过串口工具(如xshell)查看和交互
场景2:系统维护
-
系统图形界面崩溃时
-
按 Ctrl+Alt+F2 切换到tty2
-
登录后可以修复系统
-
这里tty2就是你的控制台
场景3:多用户服务器
-
多个用户通过SSH远程登录
-
每个用户获得一个伪终端(/dev/pts/X)
-
各自独立工作,互不干扰
十、TTY驱动框架工作流程
1、数据流向图:
css
用户空间程序
↓
read()/write()系统调用
↓
TTY核心层(/dev/ttyS0)
↓
行规程层(编辑、转换、缓冲)
↓
TTY驱动层(UART驱动、键盘显示器驱动)
↓
硬件层(串口芯片)2、详细流程示例:用户输入"hello"
1、用户输入:在键盘上依次按下h、e、l、l、o
2、TTY驱动层:接收键盘扫描码,转换为字符
3、行规程层:
-
回显每个字符到屏幕
-
将字符存入行缓冲区
-
等待回车键
4、用户按回车
5、行规程层:
-
将回车转换为换行(
\n) -
将整行数据 "hello\n" 提交给TTY核心层(没输入换行符,应用程序就不会接收到数据)
6、TTY核心层:将数据传递给用户空间程序(如shell)
7、用户程序:收到"hello\n",执行相应命令
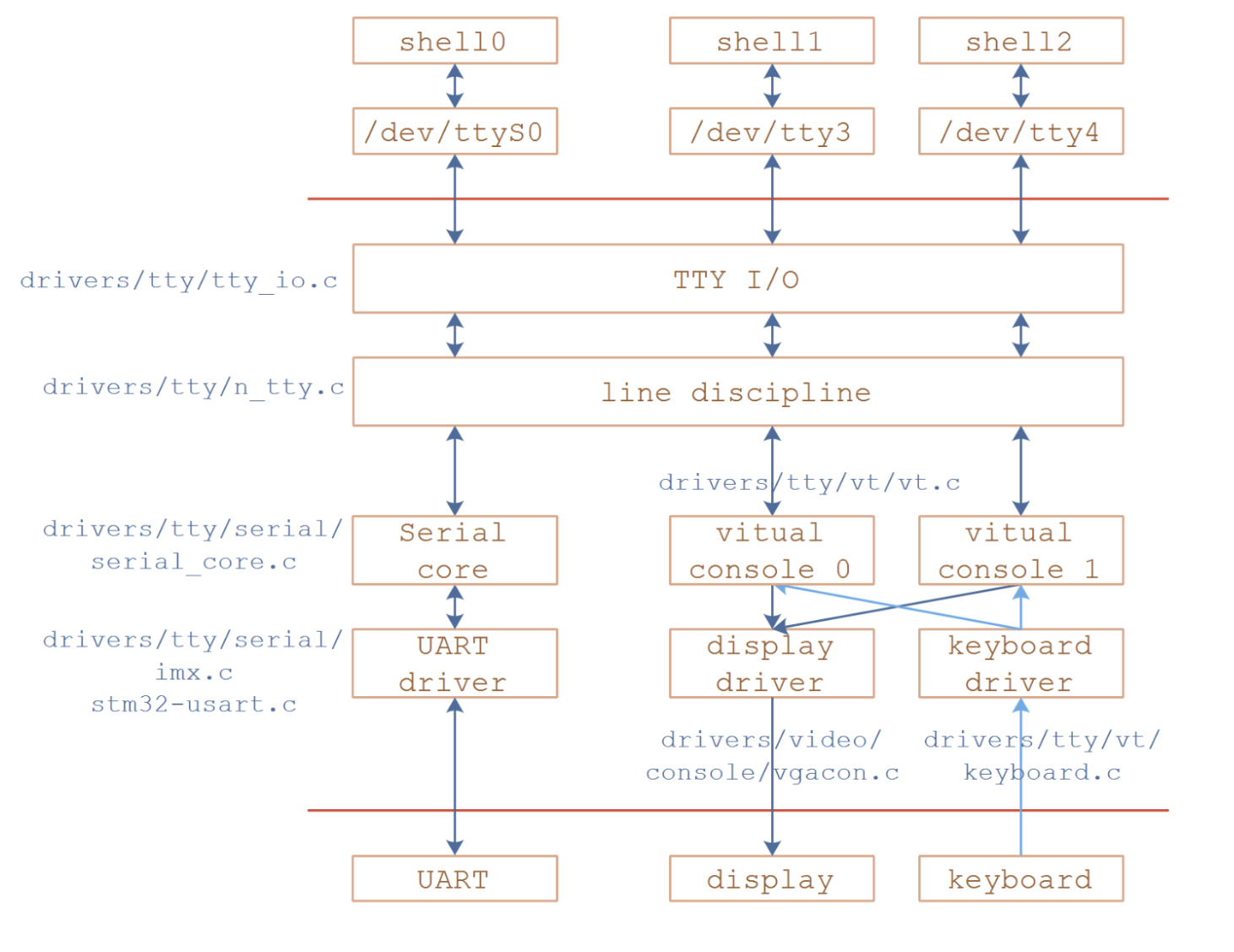
十一、UART子系统的分层结构
css
用户空间程序
↓
┌─────────────────────────────────┐
│ 第1层:tty_io层 │ ← 系统调用入口,管理tty_struct
├─────────────────────────────────┤
│ 第2层:行规程层 │ ← 数据处理中心(编辑、回显、缓冲)
├─────────────────────────────────┤
│ 第3层:串口核心层 │ ← 通用串口逻辑,缓冲区管理
├─────────────────────────────────┤
│ 第4层:硬件驱动层 │ ← 具体硬件操作(键盘/UART)
└─────────────────────────────────┘
↓
硬件设备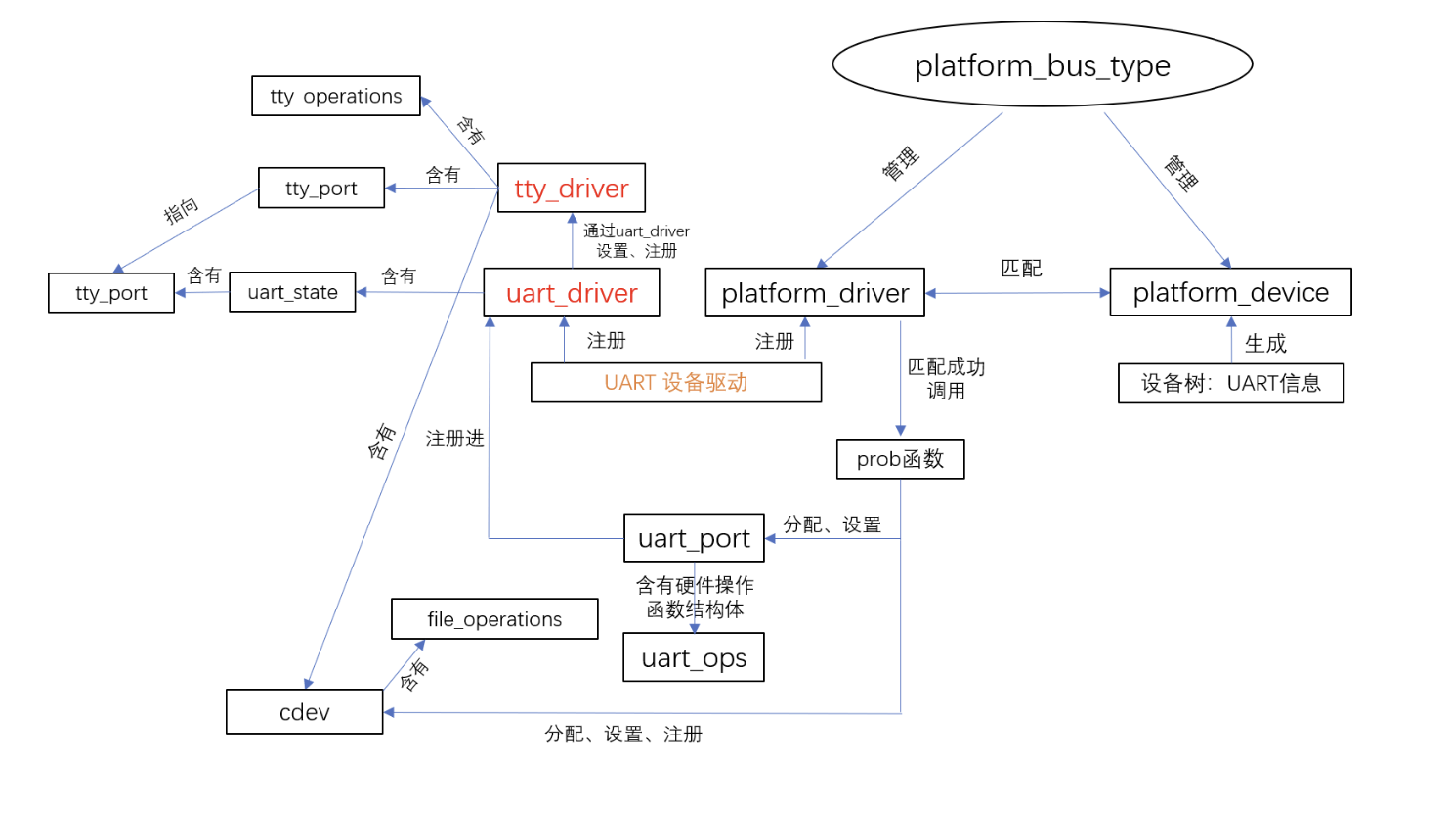
第1层:tty_io层(设备文件接口层)
位置:drivers/tty/tty_io.c
作用 :用户空间与内核的桥梁
核心功能:
1、设备文件操作:实现file_operations结构体
cpp
const struct file_operations tty_fops = {
.llseek = no_llseek,
.read = tty_read,
.write = tty_write,
.poll = tty_poll,
.unlocked_ioctl = tty_ioctl,
.compat_ioctl = tty_ioctl,
.open = tty_open,
.release = tty_release,
.fasync = tty_fasync,
};2、管理tty_struct:每个打开的终端对应一个tty_struct
cpp
struct tty_struct {
struct tty_driver *driver; // 指向tty驱动
struct tty_ldisc *ldisc; // 指向行规程
struct tty_port *port; // 指向端口
struct tty_buffer *buf; // 缓冲区
// ... 其他字段
};3、系统调用入口:
cpp
// 当应用程序调用 read(fd, buf, count) 时:
SYSCALL_DEFINE3(read, ...) → vfs_read() → tty_read()
// 当应用程序调用 write(fd, buf, count) 时:
SYSCALL_DEFINE3(write, ...) → vfs_write() → tty_write()工作流程:
cpp
应用程序:open("/dev/ttyS0", O_RDWR)
↓
系统调用
↓
tty_open()
↓
分配tty_struct
↓
关联行规程(N_TTY)
↓
关联串口驱动第2层:行规程层(数据处理层)
位置:drivers/tty/n_tty.c(默认行规程)
作用 :数据的智能处理器
核心数据结构:
cpp
struct n_tty_data {
unsigned char read_buf[N_TTY_BUF_SIZE]; // 读缓冲区(4096字节)
unsigned char echo_buf[N_TTY_BUF_SIZE]; // 回显缓冲区
size_t read_head, read_tail; // 读写指针
size_t echo_head, echo_tail; // 回显指针
wait_queue_head_t read_wait; // 读等待队列
wait_queue_head_t write_wait; // 写等待队列
unsigned char lnext:1; // 下一个字符字面值
// ... 其他标志位
};关键处理功能:
1、行编辑:退格(Backspace)、清除单词(Ctrl+W)、清除行(Ctrl+U)
2、回显控制:显示输入字符,或隐藏(如密码输入)
3、特殊字符处理:
-
Ctrl+C→ SIGINT信号 -
Ctrl+Z→ SIGTSTP信号 -
Ctrl+\→ SIGQUIT信号
4、字符转换 :\r\n ↔ \n 转换
第3层:串口核心层(通用逻辑层)
位置:drivers/tty/serial/serial_core.c
作用 :所有串口共享的通用逻辑
核心数据结构:
cpp
struct uart_state {
struct tty_port port; // tty端口
struct circ_buf xmit; // 发送环形缓冲区
struct uart_port *uart_port; // 硬件端口指针
struct uart_icount icount; // 统计信息
// ...
};
struct uart_port {
spinlock_t lock; // 自旋锁
unsigned int iobase; // IO端口基地址
void __iomem *membase; // 内存映射基地址
unsigned int irq; // 中断号
unsigned int uartclk; // 时钟频率
unsigned int fifosize; // FIFO大小
unsigned char x_char; // XON/XOFF字符
struct uart_ops *ops; // 硬件操作函数集
// ...
};主要功能:
1、缓冲区管理:环形缓冲区操作
2、中断处理框架:统一的中断处理入口
3、波特率计算:将波特率转换为分频值
4、流控支持:RTS/CTS硬件流控
5、状态管理:跟踪串口状态(打开、关闭、挂起)
关键函数:
cpp
// 数据流向管理
uart_write() // 写入数据到发送缓冲区
uart_start() // 启动发送
uart_handle_sysrq_char() // 处理SysRq键
uart_insert_char() // 插入接收到的字符
// 配置管理
uart_get_baud_rate() // 计算波特率
uart_update_timeout() // 更新超时设置
uart_set_options() // 设置串口选项第4层:硬件驱动层(硬件操作层)
位置:drivers/tty/serial/imx.c(IMX6ULL)
作用 :与具体硬件交互
核心操作集:
cpp
static const struct uart_ops imx_uart_ops = {
.tx_empty = imx_tx_empty, // 检查发送是否完成
.set_mctrl = imx_set_mctrl, // 设置MODEM控制线
.get_mctrl = imx_get_mctrl, // 获取MODEM状态
.stop_tx = imx_stop_tx, // 停止发送
.start_tx = imx_start_tx, // 开始发送
.stop_rx = imx_stop_rx, // 停止接收
.enable_ms = imx_enable_ms, // 使能MODEM状态中断
.break_ctl = imx_break_ctl, // 控制Break信号
.startup = imx_startup, // 启动串口
.shutdown = imx_shutdown, // 关闭串口
.set_termios = imx_set_termios, // 设置终端属性
.type = imx_type, // 返回类型字符串
.request_port = imx_request_port, // 请求端口资源
.config_port = imx_config_port, // 配置端口
.verify_port = imx_verify_port, // 验证端口
};十二、行规程(Line Discipline)详解
1、什么是行规程?
行规程是TTY子系统中的数据处理层,负责在用户输入输出时进行"智能处理"。
2、行规程的三种模式:
| 模式 | 函数处理 | 典型应用 |
|---|---|---|
| 规范模式(cooked) | 行缓冲、编辑、回显、信号处理 | 命令行交互 |
| 非规范模式(cbreak) | 即时响应,无行缓冲 | vim编辑器 |
| 原始模式(raw) | 无任何处理,直接传递 | 串口通信 |
3、行规程的主要功能:
a、行编辑功能
-
退格键处理:删除前一个字符
-
清除单词:Ctrl+W
-
清除整行:Ctrl+U
-
重新打印:Ctrl+R
css
# 在规范模式下,输入时可以使用这些编辑功能
# 输入 "hello",按退格键删除最后的'o',变成"hell"b、回显控制
-
将用户输入的字符显示在屏幕上
-
可以关闭回显(输入密码时)
c、特殊字符转换
-
将回车(\r)转换为换行(\n)
-
将 Ctrl+C 转换为中断信号(SIGINT)
d、行缓冲
-
等待用户按下回车键才提交整行数据
-
允许在提交前进行编辑
十三、注册字符设备驱动的两种方法
1、字符设备驱动的基本框架:
- 确定主设备号(可以静态指定或动态分配)。
- 定义file_operations结构体,并实现其中的操作函数(如open、read、write等)。
- 将file_operations结构体注册到内核中。
- 创建设备节点(可以通过class_create和device_create自动创建)。
2、两种注册方法对比
Linux内核提供了两种字符设备驱动注册方法,下面是它们的对比:
| 对比项 | 旧方法(register_chrdev) | 新方法(cdev_xxx系列) |
|---|---|---|
| 出现时间 | 早期方法,简单直接 | 较新方法,更灵活 |
| 资源使用 | 一次注册256个次设备号,可能浪费 | 只注册需要的设备号范围,更节省 |
| 灵活性 | 较低,适合简单驱动 | 高,适合复杂驱动 |
| 现代驱动 | 较少使用,逐渐淘汰 | 推荐使用,更标准 |
| 代码复杂度 | 简单,一个函数搞定 | 稍复杂,需要多步骤 |
3、旧方法详解:register_chrdev
a、工作原理
cpp
// 一个函数搞定所有事情
int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops);-
一次性注册:主设备号 + 0~255的所有次设备号
-
自动分配:如果major=0,内核自动分配主设备号
-
简单粗暴:适合初学者,但不够灵活
b、优点与缺点
优点:
-
代码简单,容易理解
-
一个函数完成注册
缺点:
-
资源浪费:注册256个次设备号,即使只用一个
-
不够灵活:无法精确控制设备号范围
-
不推荐使用:新驱动开发中已逐渐淘汰
4、新方法详解:cdev_xxx系列函数
a、工作原理(三步法)
新方法将注册过程分解为三个步骤:
cpp
// 第一步:注册设备号范围
alloc_chrdev_region(&dev_id, first_minor, count, name);
// 第二步:初始化cdev结构
cdev_init(&my_cdev, &fops);
// 第三步:添加cdev到系统
cdev_add(&my_cdev, dev_id, count);b、核心概念理解
设备号(dev_t)
-
包含主设备号 和次设备号
-
32位整数:高12位为主设备号,低20位为次设备号
cpp
dev_t dev_id; // 设备号
MAJOR(dev_id); // 提取主设备号
MINOR(dev_id); // 提取次设备号
MKDEV(major, minor); // 合成设备号c、函数详解
cpp
int alloc_chrdev_region(dev_t *dev, unsigned int firstminor, unsigned int count, const char *name);-
动态分配:内核自动分配一个可用的主设备号
-
精确控制:可以指定起始次设备号和设备数量
-
示例 :
alloc_chrdev_region(&dev_id, 0, 3, "mydev")分配一个主设备号,次设备号0、1、2共3个设备,设备名为"mydev"
cpp
void cdev_init(struct cdev *cdev, const struct file_operations *fops);-
初始化cdev结构体
-
关联file_operations操作函数
cpp
int cdev_add(struct cdev *p, dev_t dev, unsigned int count);-
将cdev添加到系统,设备生效
-
可以指定多个设备(count>1)
5、为什么推荐新方法?
场景1:多个相似设备
cpp
// 创建一个主设备号,5个次设备号
alloc_chrdev_region(&dev_id, 0, 5, "multi_device");
// 对应5个设备文件:/dev/multi_device0, /dev/multi_device1...场景2:避免设备号冲突
旧方法需要手动指定主设备号,可能与其他驱动冲突。 新方法自动分配,避免冲突。
场景3:节省资源
只注册实际需要的设备号,不浪费。
场景4:与sysfs集成更好
方便创建设备节点,管理更规范。
十四、场景分析:应用程序通过串口发送"Hello"
css
应用程序: write(fd, "Hello", 5);
↓
系统调用进入内核
↓
TTY层 (tty_io.c)
↓ tty_write()
↓
行规程处理(如需要)
↓
serial_core.c
↓ uart_write()
↓
数据放入发送缓冲区
↓
imx.c硬件驱动
↓ imx_start_tx()
↓
使能发送中断/直接发送
↓
硬件UART控制器
↓ 通过TxD引脚发出1、用户空间到TTY层
cpp
// tty_io.c
ssize_t tty_write(struct file *file, const char __user *buf, size_t count)
{
// 1. 获取当前tty结构
// 2. 调用行规程的write函数
// 3. 行规程可能进行数据处理(规范模式下)
// 4. 调用uart_write
}2、串口核心层处理
cpp
// serial_core.c
int uart_write(struct uart_port *port, const unsigned char *buf, int count)
{
// 1. 将数据放入环形缓冲区
// 2. 调用硬件驱动的start_tx函数
// 3. 返回写入的字节数
}3、硬件驱动层发送
cpp
// imx.c
static void imx_start_tx(struct uart_port *port)
{
// 1. 检查发送缓冲区是否有数据
// 2. 使能发送中断或直接发送
// 3. 写入UART数据寄存器
}
// 发送中断处理函数
static irqreturn_t imx_txint(int irq, void *dev_id)
{
// 1. 检查发送缓冲区
// 2. 从缓冲区取出下一个字符
// 3. 写入数据寄存器
// 4. 如果缓冲区空,禁用发送中断
}十五、UART读写总体流程图
css
读取流程(接收数据):
硬件UART收到数据 → 产生接收中断 → 硬件驱动读取数据 → 存入串口缓冲区 →
通知行规程 → 行规程处理数据 → 唤醒等待的应用程序 → 应用从行规程缓冲区读取数据
写入流程(发送数据):
应用程序调用write → TTY层处理 → 行规程处理 → 存入发送缓冲区 →
串口核心层启动发送 → 硬件驱动开始发送 → 中断方式发送剩余数据 → 发送完成1、读取数据(Read)流程详解
a、应用程序发起读取
cpp
// 用户程序
char buffer[100];
int count = read(fd, buffer, sizeof(buffer)); // 从串口读取数据b、TTY层处理(tty_io.c)
cpp
// drivers/tty/tty_io.c
ssize_t tty_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
struct tty_struct *tty = file->private_data;
// 1. 获取当前tty结构
// 2. 检查行规程是否可用
// 3. 调用行规程的读取函数
return tty->ldisc->ops->read(tty, file, buf, count);
}关键点:
-
tty_read是read系统调用的内核实现
-
调用行规程的read函数(默认为N_TTY行规程)
c、行规程处理(n_tty.c)
cpp
// drivers/tty/n_tty.c
static ssize_t n_tty_read(struct tty_struct *tty, struct file *file,
unsigned char *kbuf, size_t nr)
{
// 1. 检查是否有足够数据可读
// 2. 如果无数据,让进程休眠(等待数据到达)
// 3. 从行规程缓冲区复制数据到用户空间
// 4. 返回读取的字节数
}d、数据如何到达行规程缓冲区?
中断处理流程:
css
硬件接收数据 → 产生中断 → 中断处理函数读取数据 → 存入串口缓冲区 → 通知行规程 → 行规程处理存入自己的缓冲区 → 唤醒等待进程以IMX6ULL为例(中断方式):
cpp
// drivers/tty/serial/imx.c
static irqreturn_t imx_rxint(int irq, void *dev_id)
{
struct imx_port *sport = dev_id;
unsigned int rx, flg;
// 1. 读取状态寄存器
unsigned int status = imx_uart_read(sport, USR1);
// 2. 读取数据寄存器获取接收到的字符
rx = imx_uart_read(sport, URXD0);
// 3. 检查错误(奇偶校验、帧错误等)
flg = TTY_NORMAL;
if (status & USR1_BRCD)
flg = TTY_BREAK;
// 4. 将数据存入tty缓冲区
tty_insert_flip_char(&sport->port.state->port, rx, flg);
// 5. 通知行规程处理新数据
tty_flip_buffer_push(&sport->port.state->port);
return IRQ_HANDLED;
}2、写入数据(Write)流程详解
a、应用程序发起写入
cpp
// 用户程序
const char *msg = "Hello UART!\n";
int count = write(fd, msg, strlen(msg)); // 向串口写入数据b、TTY层处理(tty_io.c)
cpp
// drivers/tty/tty_io.c
ssize_t tty_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
{
struct tty_struct *tty = file->private_data;
// 1. 获取当前tty结构
// 2. 检查行规程是否可用
// 3. 调用行规程的写入函数
return tty->ldisc->ops->write(tty, file, buf, count);
}c、行规程处理(n_tty.c)
cpp
// drivers/tty/n_tty.c
static ssize_t n_tty_write(struct tty_struct *tty, struct file *file,
const unsigned char *buf, size_t nr)
{
// 1. 如果需要,进行数据处理(如规范模式下的转换)
// 2. 调用uart_write将数据传递给串口核心层
// 3. 返回写入的字节数
}行规程处理的内容:
-
规范模式:特殊字符处理(如回车换行转换)
-
回显控制:是否将输入字符显示到终端
-
信号生成:如Ctrl+C生成SIGINT信号
d、串口核心层处理(serial_core.c)
cpp
// drivers/tty/serial/serial_core.c
static int uart_write(struct uart_port *port, const unsigned char *buf, int count)
{
struct circ_buf *circ = &port->state->xmit;
int c, ret = 0;
// 1. 检查发送缓冲区是否有空间
// 2. 将数据放入环形发送缓冲区
while (1) {
c = CIRC_SPACE_TO_END(circ->head, circ->tail, UART_XMIT_SIZE);
if (count < c)
c = count;
memcpy(circ->buf + circ->head, buf, c);
circ->head = (circ->head + c) & (UART_XMIT_SIZE - 1);
buf += c;
count -= c;
ret += c;
if (count == 0)
break;
}
// 3. 通知硬件驱动开始发送
port->ops->start_tx(port);
return ret;
}发送缓冲区结构:
cpp
struct uart_state {
struct tty_port port; // tty端口
struct circ_buf xmit; // 发送环形缓冲区
struct uart_port *uart_port; // 串口端口
};e、 硬件驱动发送数据
发送的两种方式:
-
中断方式:数据放入缓冲区,使能发送中断,在中断中发送
-
DMA方式:配置DMA自动发送数据
中断方式(以IMX6ULL为例):
cpp
// drivers/tty/serial/imx.c
static void imx_start_tx(struct uart_port *port)
{
struct imx_port *sport = (struct imx_port *)port;
unsigned int temp;
// 1. 检查发送缓冲区是否有数据
if (!uart_circ_empty(&sport->port.state->xmit)) {
// 2. 使能发送中断
temp = imx_uart_read(sport, UCR1);
temp |= UCR1_TXMPTYEN;
imx_uart_write(sport, temp, UCR1);
}
}
// 发送中断处理函数
static irqreturn_t imx_txint(int irq, void *dev_id)
{
struct imx_port *sport = dev_id;
struct circ_buf *xmit = &sport->port.state->xmit;
// 1. 检查发送缓冲区是否还有数据
while (!uart_circ_empty(xmit)) {
// 2. 从缓冲区取出一个字符
unsigned char c = xmit->buf[xmit->tail];
// 3. 写入UART数据寄存器,硬件会自动发送
imx_uart_write(sport, c, URTX0);
// 4. 更新缓冲区指针
xmit->tail = (xmit->tail + 1) & (UART_XMIT_SIZE - 1);
// 5. 更新统计信息
sport->port.icount.tx++;
// 6. 如果缓冲区空了,停止发送中断
if (uart_circ_empty(xmit)) {
temp = imx_uart_read(sport, UCR1);
temp &= ~UCR1_TXMPTYEN;
imx_uart_write(sport, temp, UCR1);
break;
}
}
return IRQ_HANDLED;
}