前言
前文的广义预测控制的计算量太大、算法过于复杂,于是后面又提出里两种改进的广义预测控制。一种是基于CARIMA模型,和基本的广义预测控制使用的模型一致,还有一种是基于CARMA模型。
改进的广义预测控制具有算法简单、计算量小、不受矩阵C稳定的限制,在实际中运用更广。
一、CARIMA_GPC
下面先介绍基于CARIMA模型的改进的广义预测控制。
1.1 算法推理
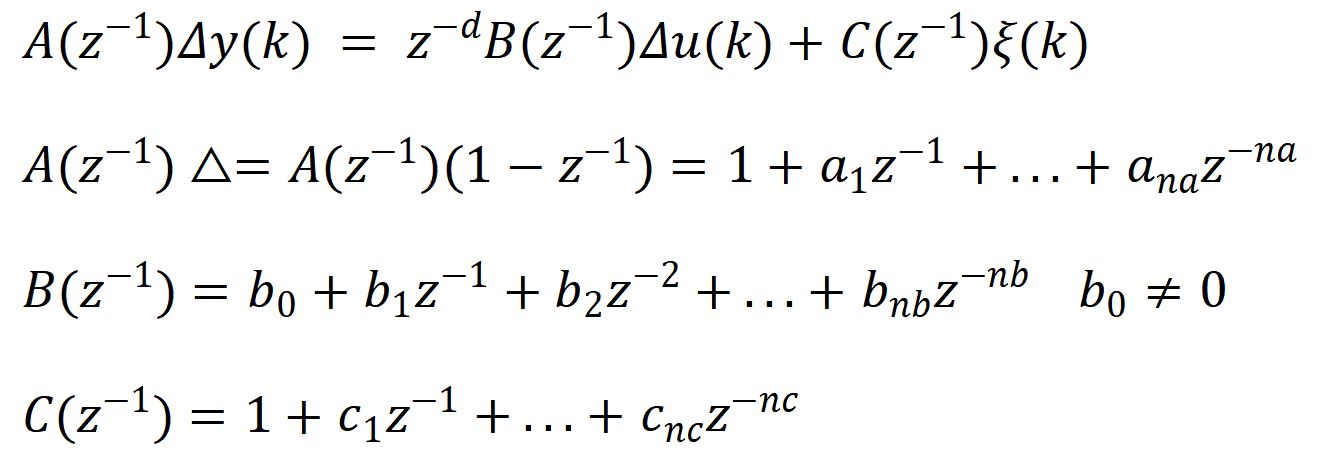
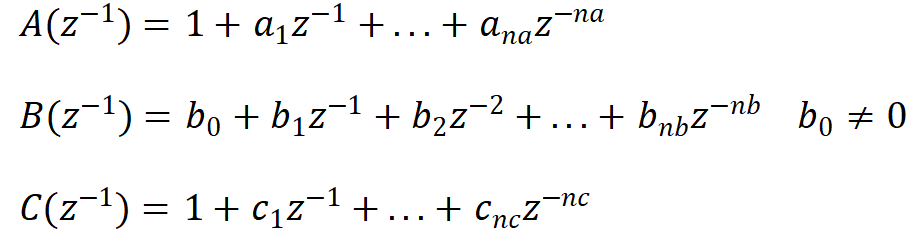
受控自回归积分滑动平均模型(CARIMA )如下:

可化简成:
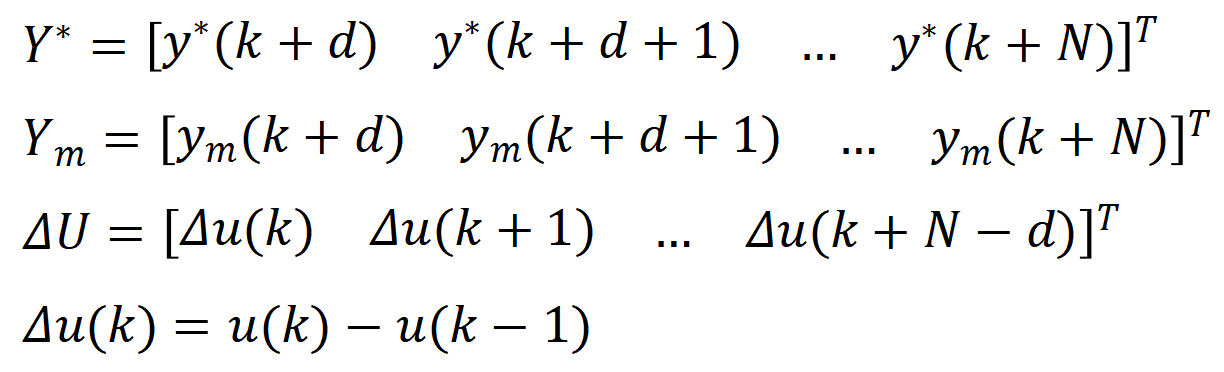
将来时刻的最小方差输出预测模型为:
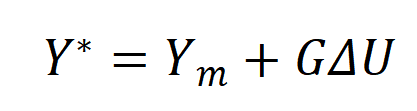
式中Y*为输出预测向量、Ym是一个调节向量、G是控制矩阵、U是控制增量向量
控制矩阵:

 其中的d是纯延时环节,N为预测长度。ym是由过去的控制输入和输出确定的
其中的d是纯延时环节,N为预测长度。ym是由过去的控制输入和输出确定的
整个系统预测控制的性能指标为:

可得到控制律:

其中的Yr为参考轨迹向量:
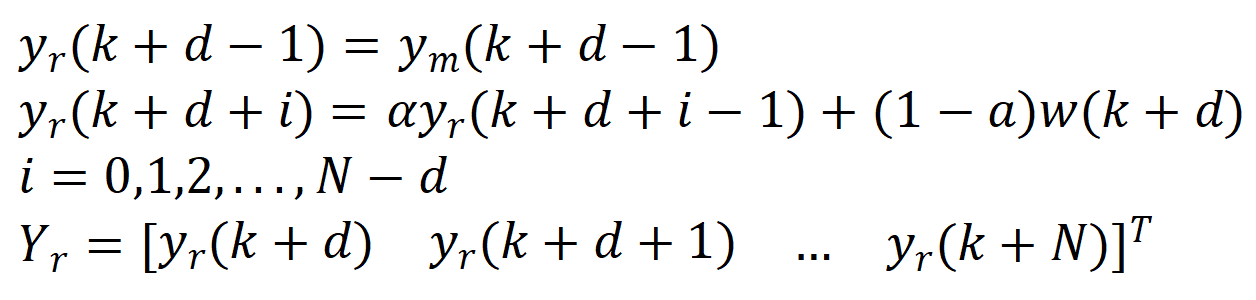
w(k)为k时刻的期望输出,为柔化系数。
综上计算的控制量:

1.2 实例说明
有如下开环不稳定的非最小相位系统:

其中是方差为0.01的白噪声,上文的实例相同,只不过C(z)不等于1了,写成适合GPC控制的模型如下:

录入参数如下
Matlab
clear; close;
A = conv([1 -2 1.1],[1 -1]); B = [1 2]; C = [1 -2.5]; d = 4;
na = length(A)-1; nb = length(B)-1; nc = length(C)-1;接下来确定预测长度N、仿真步长L、期望输出w和噪声信号u_noise。
Matlab
N = 8;
L = 600;
w = 10*[ones(1,L/4) -ones(1,L/4) ones(1,L/4) -ones(1,L/4+d)];%期望输出
u_noise = sqrt(0.1) * randn(1,L);%噪声信号下面先计算控制矩阵G
Matlab
G = Gsolve(A,B,d,N);
%****************************************************************
%功能:改进GPC控制矩阵G的求解(CARIMA模型)
%调用格式:G=Gsolve(a,b,d,N)
%输入参数:多项式A、B(行向量)、纯滞后和预测长度(共4个)
%输出参数:控制矩阵G
%****************************************************************
function G=Gsolve(a,b,d,N)
na=length(a)-1; nb=length(b)-1; %na是多项式A的阶次,nb是多项式B的阶次
a1=a(2:na+1);
G=zeros(N-d+1);
G(1,1)=b(1);
for j=2:N-d+1
ab=0;
for i=1:min(j-1,na)
ab=ab+a1(i)*G(j-i,1);
end
if j<=nb+1
b1j=b(j);
else
b1j=0;
end
G(j,1)=b1j-ab;
for i=2:j
G(j,i)=G(j-1,i-1);
end
end
end接着就是主题代码,主要是计算调节向量Ym,参考轨迹向量Yr以及控制输入u(k)。对比上面的公式可以发现,我的代码完全就是复制公式,非常直观。这种写法非常适合各种算法实现。
Matlab
R = 1*eye(N-d+1); a = 0.7;
%让t=10设为0时刻,则之前的时刻方便表达
time = zeros(1,L);
y = zeros(1,L);
yr = zeros(1,L);
ym = zeros(1,L);
dU = zeros(1,L);
u = zeros(1,L);
t = 10;
for k=t:L-t
time(k) = k-t+1;
y(k) = -A(2:na+1)*[y(k-1);y(k-2);y(k-3)]+B*[dU(k-4) dU(k-5)]'+C*[u_noise(k) u_noise(k-1)]';
ym(k) = y(k);
for j = 1:N
ym(k+j) = -A(2:na+1)*flip(ym(k+j-na:k+j-1))'+B*flip(dU(k+j-d-nb:k+j-d))'+C*flip(u_noise(k+j-nc:k+j))';
end
yr(k+d-1) = ym(k+d-1);
for j = 0:N-d
yr(k+d+j) = a*yr(k+d+j-1)+(1-a)*w(k+d);
end
Ym = [ym(k+d:k+N)]';
Yr = [yr(k+d:k+N)]';
dUK = (G'*G+R)\G'*(Yr-Ym);
dU(k) = dUK(1);
u(k) = u(k-1)+dUK(1);
yr(k+N+1) = a*yr(k+N+1-1)+(1-a)*w(k+1+d);
end结果输出
Matlab
figure;
subplot(2,1,1);
plot(time(t:L-t),w(t:L-t),'r:',time(t:L-t),y(t:L-t));
xlabel('k'); ylabel('w(k)、y(k)');
legend('w(k)','y(k)');
grid on;
subplot(2,1,2);
plot(time(t:L-t),u(t:L-t));
xlabel('k'); ylabel('u(k)');
grid on;1.3 完整代码
Matlab
clear; close;
A = conv([1 -2 1.1],[1 -1]); B = [1 2]; C = [1 -2.5]; d = 4;
na = length(A)-1; nb = length(B)-1; nc = length(C)-1;
N = 8;
R = 1*eye(N-d+1); a = 0.7;
G = Gsolve(A,B,d,N);
L = 600;
w = 10*[ones(1,L/4) -ones(1,L/4) ones(1,L/4) -ones(1,L/4+d)];%期望输出
u_noise = sqrt(0.1) * randn(1,L);%噪声信号
%u_noise = zeros(1,L);
%让t=10设为0时刻,则之前的时刻方便表达
time = zeros(1,L);
y = zeros(1,L);
yr = zeros(1,L);
ym = zeros(1,L);
dU = zeros(1,L);
u = zeros(1,L);
t = 10;
for k=t:L-t
time(k) = k-t+1;
y(k) = -A(2:na+1)*[y(k-1);y(k-2);y(k-3)]+B*[dU(k-4) dU(k-5)]'+C*[u_noise(k) u_noise(k-1)]';
ym(k) = y(k);
for j = 1:N
ym(k+j) = -A(2:na+1)*flip(ym(k+j-na:k+j-1))'+B*flip(dU(k+j-d-nb:k+j-d))'+C*flip(u_noise(k+j-nc:k+j))';
end
yr(k+d-1) = ym(k+d-1);
for j = 0:N-d
yr(k+d+j) = a*yr(k+d+j-1)+(1-a)*w(k+d);
end
Ym = [ym(k+d:k+N)]';
Yr = [yr(k+d:k+N)]';
dUK = (G'*G+R)\G'*(Yr-Ym);
dU(k) = dUK(1);
u(k) = u(k-1)+dUK(1);
yr(k+N+1) = a*yr(k+N+1-1)+(1-a)*w(k+1+d);
end
figure;
subplot(2,1,1);
plot(time(t:L-t),w(t:L-t),'r:',time(t:L-t),y(t:L-t));
xlabel('k'); ylabel('w(k)、y(k)');
legend('w(k)','y(k)');
grid on;
subplot(2,1,2);
plot(time(t:L-t),u(t:L-t));
xlabel('k'); ylabel('u(k)');
grid on;
%****************************************************************
%功能:改进GPC控制矩阵G的求解(CARIMA模型)
%调用格式:G=Gsolve(a,b,d,N)
%输入参数:多项式A、B(行向量)、纯滞后和预测长度(共4个)
%输出参数:控制矩阵G
%****************************************************************
function G=Gsolve(a,b,d,N)
na=length(a)-1; nb=length(b)-1; %na是多项式A的阶次,nb是多项式B的阶次
a1=a(2:na+1);
G=zeros(N-d+1);
G(1,1)=b(1);
for j=2:N-d+1
ab=0;
for i=1:min(j-1,na)
ab=ab+a1(i)*G(j-i,1);
end
if j<=nb+1
b1j=b(j);
else
b1j=0;
end
G(j,1)=b1j-ab;
for i=2:j
G(j,i)=G(j-1,i-1);
end
end
end1.4 结果展示
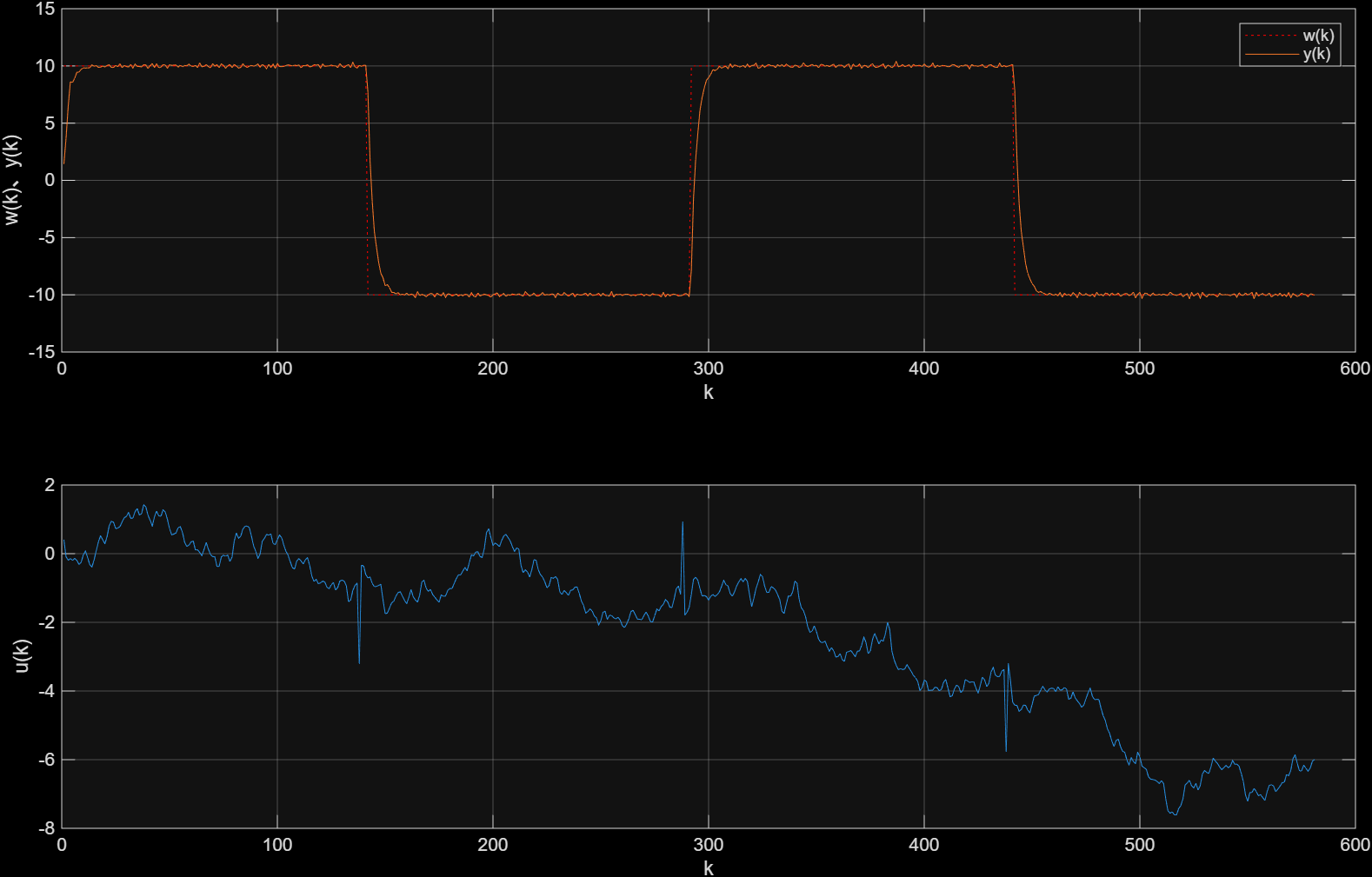
可以看出,控制效果非常好。在幅值为10的方波期望信号、方差为0.1的高斯噪声分布下,还是第一次理论上有这么好的跟踪效果
二、CARMA_GPC
接着是基于CARMA模型的改进的广义预测控制。大部分内容相同,就简化说明了。
2.1 算法推理
受控自回归滑动平均模型(CARMA )如下:

其他内容和CARIMA_GPC相同,调节向量Ym有所不同为:

其中的d是纯延时环节,N为预测长度。ym是由过去的控制输入和输出确定的
2.2 实例说明
有如下开环不稳定的非最小相位系统:

其中是方差为0.01的白噪声,与第一部分的实例相同,只不过没了差分算子
因为其他部分同上面相同,那自然代码也相同,只有实例方程和Ym有所区别,这部分代码如下:
Matlab
y(k) = -A(2:na+1)*[y(k-1);y(k-2)]+B*[u(k-4) u(k-5)]'+C*[u_noise(k) u_noise(k-1)]';
ym(k) = y(k);
for j = 0:N-d
u(k+j) = u(k-1);
end
for j = 1:N
ym(k+j) = -A(2:na+1)*flip(ym(k+j-na:k+j-1))'+B*flip(u(k+j-d-nb:k+j-d))'+C*flip(u_noise(k+j-nc:k+j))';
end2.3 完整代码
Matlab
clear; close;
A = [1 -2 1.1]; B = [1 2]; C = [1 -2.5]; d = 4;
na = length(A)-1; nb = length(B)-1; nc = length(C)-1;
N = 8;
R = 1*eye(N-d+1); a = 0.7;
G = Gsolve(A,B,d,N);
L = 600;
w = 10*[ones(1,L/4) -ones(1,L/4) ones(1,L/4) -ones(1,L/4+d)];%期望输出
u_noise = sqrt(0.1) * randn(1,L);%噪声信号
%u_noise = zeros(1,L);
%让t=10设为0时刻,则之前的时刻方便表达
time = zeros(1,L);
y = zeros(1,L);
yr = zeros(1,L);
ym = zeros(1,L);
dU = zeros(1,L);
u = zeros(1,L);
t = 10;
for k=t:L-t
time(k) = k-t+1;
y(k) = -A(2:na+1)*[y(k-1);y(k-2)]+B*[u(k-4) u(k-5)]'+C*[u_noise(k) u_noise(k-1)]';
ym(k) = y(k);
for j = 0:N-d
u(k+j) = u(k-1);
end
for j = 1:N
ym(k+j) = -A(2:na+1)*flip(ym(k+j-na:k+j-1))'+B*flip(u(k+j-d-nb:k+j-d))'+C*flip(u_noise(k+j-nc:k+j))';
end
yr(k+d-1) = ym(k+d-1);
for j = 0:N-d
yr(k+d+j) = a*yr(k+d+j-1)+(1-a)*w(k+d);
end
Ym = [ym(k+d:k+N)]';
Yr = [yr(k+d:k+N)]';
dUK = (G'*G+R)\G'*(Yr-Ym);
u(k) = u(k-1)+dUK(1);
yr(k+N+1) = a*yr(k+N+1-1)+(1-a)*w(k+1+d);
end
figure;
set(gcf, "Theme", "dark");
subplot(2,1,1);
plot(time(t:L-t),w(t:L-t),'r:',time(t:L-t),y(t:L-t));
xlabel('k'); ylabel('w(k)、y(k)');
legend('w(k)','y(k)');
grid on;
subplot(2,1,2);
plot(time(t:L-t),u(t:L-t));
xlabel('k'); ylabel('u(k)');
grid on;
%****************************************************************
%功能:改进GPC控制矩阵G的求解(CARIMA模型)
%调用格式:G=Gsolve(a,b,d,N)
%输入参数:多项式A、B(行向量)、纯滞后和预测长度(共4个)
%输出参数:控制矩阵G
%****************************************************************
function G=Gsolve(a,b,d,N)
na=length(a)-1; nb=length(b)-1; %na是多项式A的阶次,nb是多项式B的阶次
a1=a(2:na+1);
G=zeros(N-d+1);
G(1,1)=b(1);
for j=2:N-d+1
ab=0;
for i=1:min(j-1,na)
ab=ab+a1(i)*G(j-i,1);
end
if j<=nb+1
b1j=b(j);
else
b1j=0;
end
G(j,1)=b1j-ab;
for i=2:j
G(j,i)=G(j-1,i-1);
end
end
end2.4 结果展示
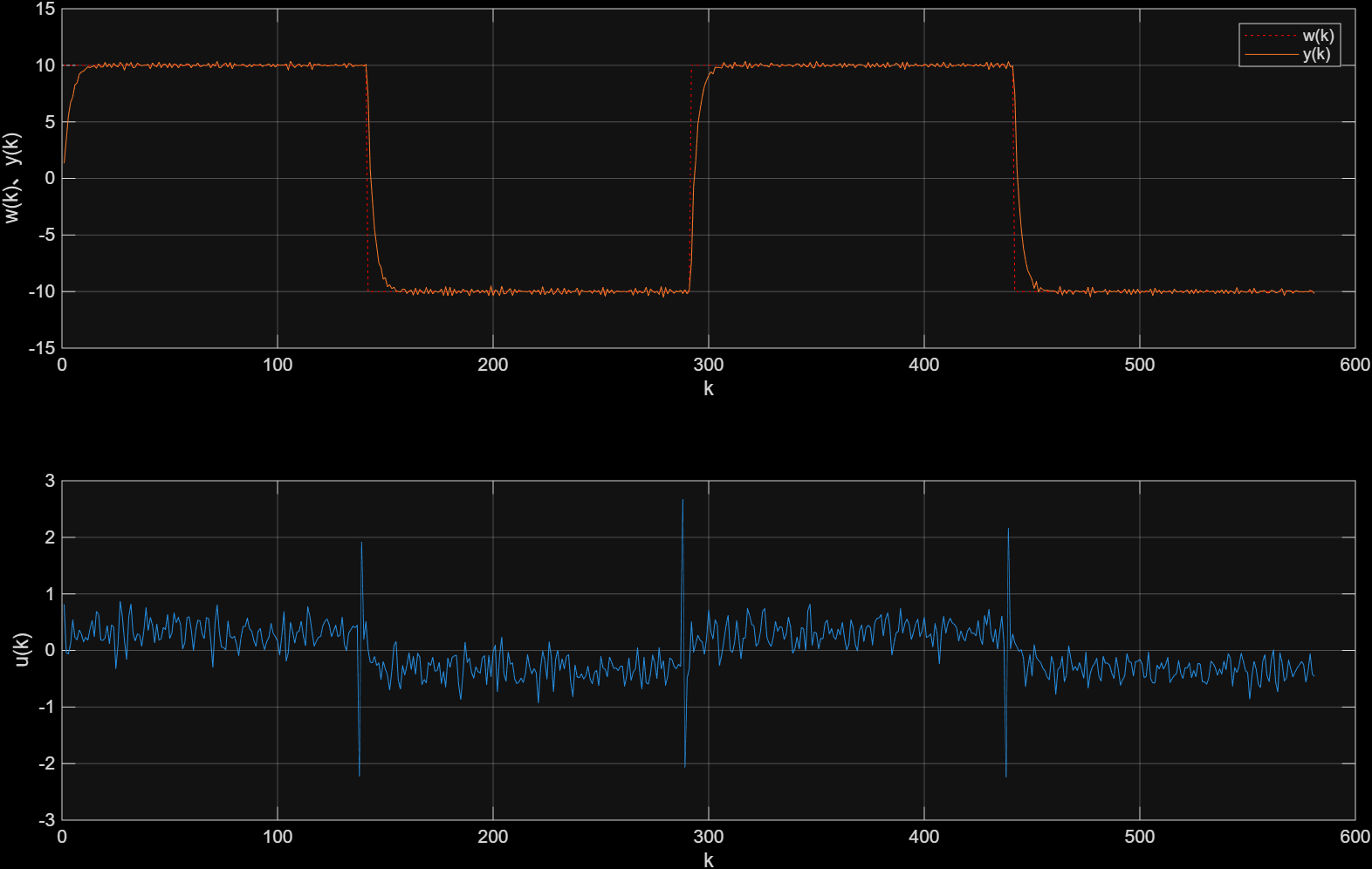
可以看出,控制效果与第一部分相同