日拱一卒之quartus芯片移植查看
altera的芯片用的比较少了,但是还是有一定的价值,那么,在使用过程中,如果遇到了想升级芯片的想法该如何呢?
首先得看看封装是否一致,如果封装都不一致了,就直接重新画板子吧。
其次,quartus软件内可以查看是否可以移植。
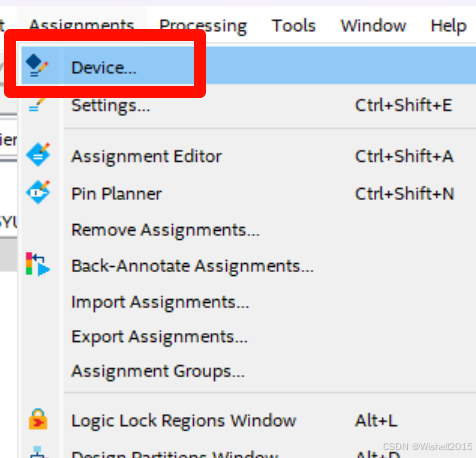
打开原来的工程,进入Device选项
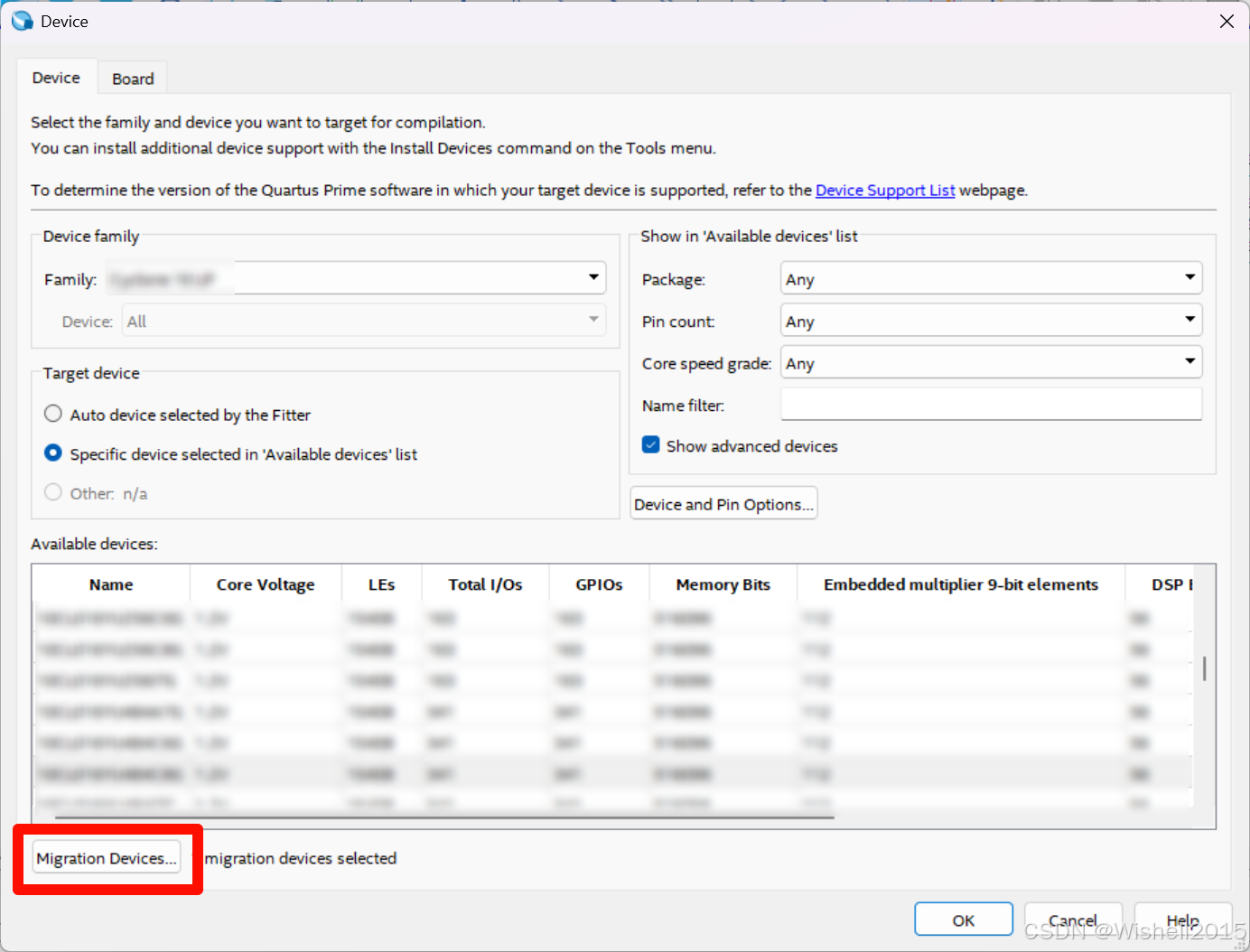
找到Migration Devices
选好要移植的设备
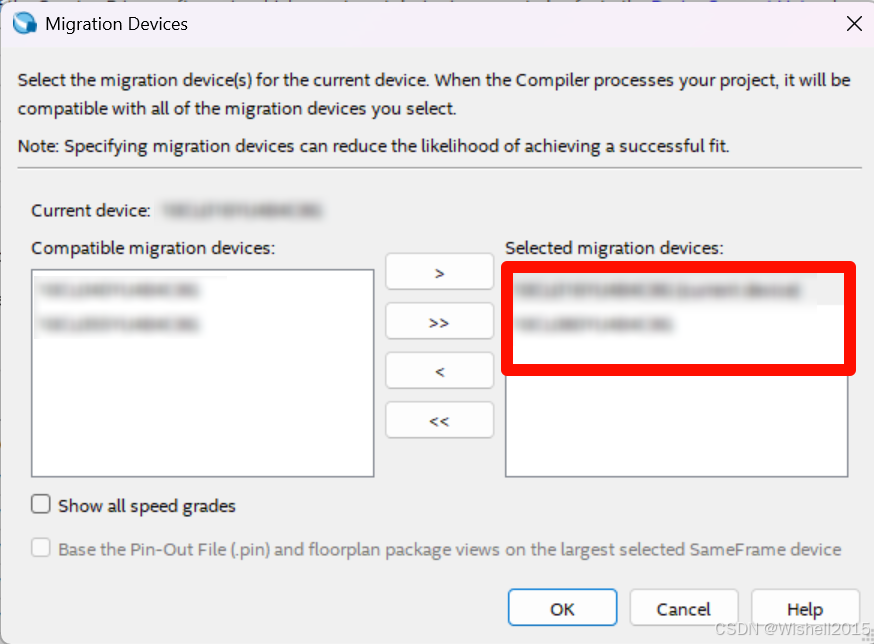
重新编译一下

据说会有个报告,但是并没有发现,于是曲线救国吧,打开Pin Planner
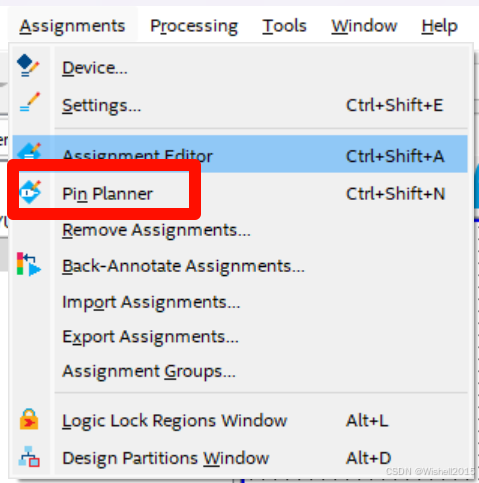
在view选项中,打开Pin Migration Window
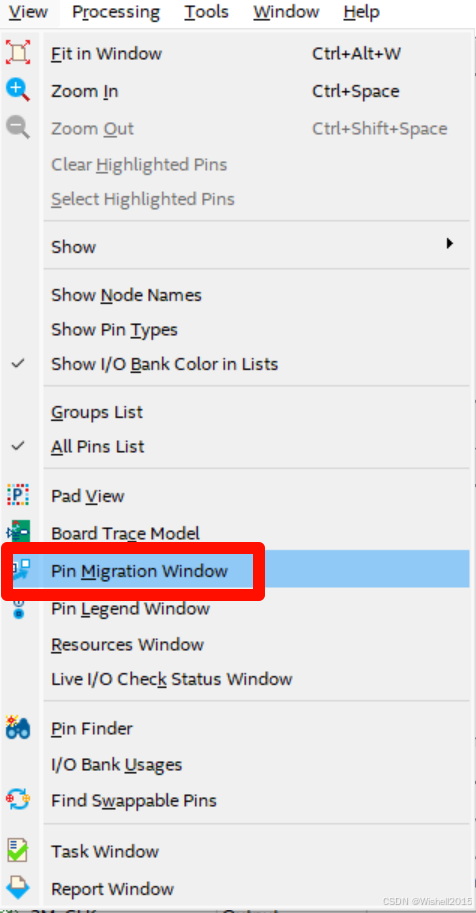
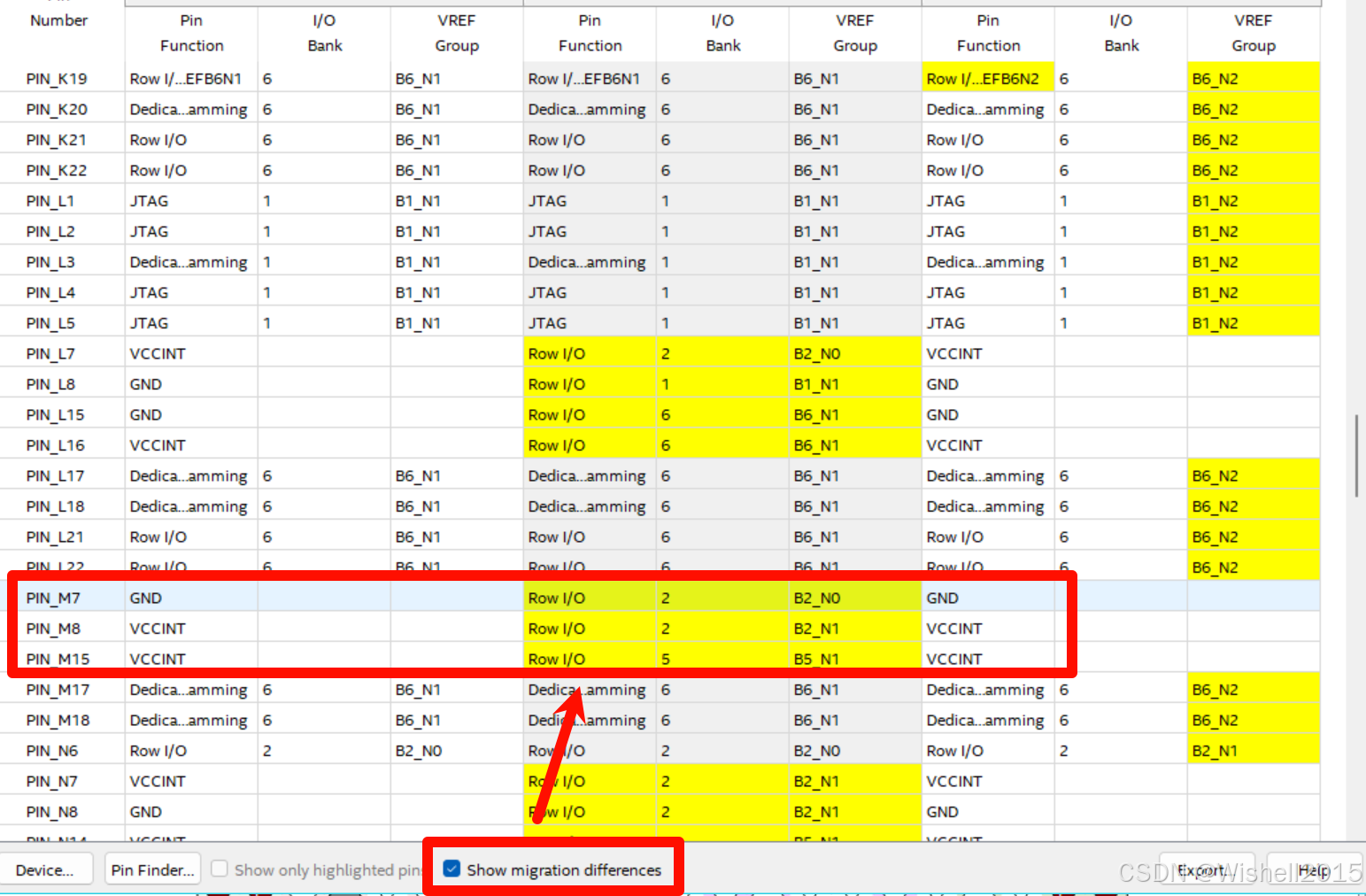
点选show migration differences 就可以查看了,如下图这样的就不要轻易的更换了,容易烧掉或功能不正常。
更进一步的话,可以自行看看编译完成后,会不会有个移植报告,不过我没找到-。-