概述:
刹车片是车辆制动的关键部件。它必须具有适当的制动效率并提供更高的稳定性。本案例研究了一种刹车材料在变形、应力和反作用力方面的表现。
目标:
查看刹车片的变形量、应力分布以及约束反力。
步骤:
1、打开 ANSYS Workbench 软件,新建静态结构分析项目。
2、定义制动盘与刹车片的材料参数;本案例分别采用不锈钢、专用制动摩擦材料。
3、导入几何模型,模型样式参考附图 1。
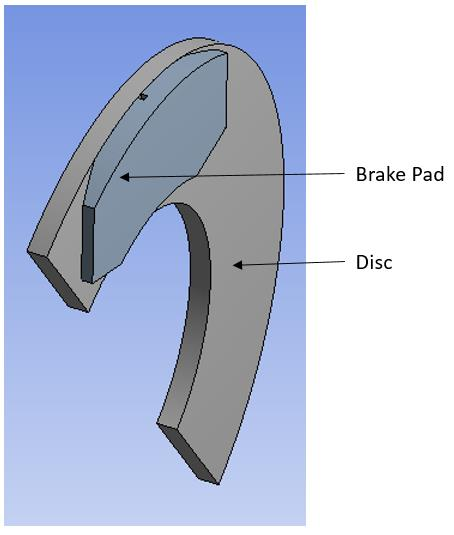
图 1 制动盘与刹车片
4、为几何模型指派材料。
5、参照图 2,在各零部件上施加合理约束。
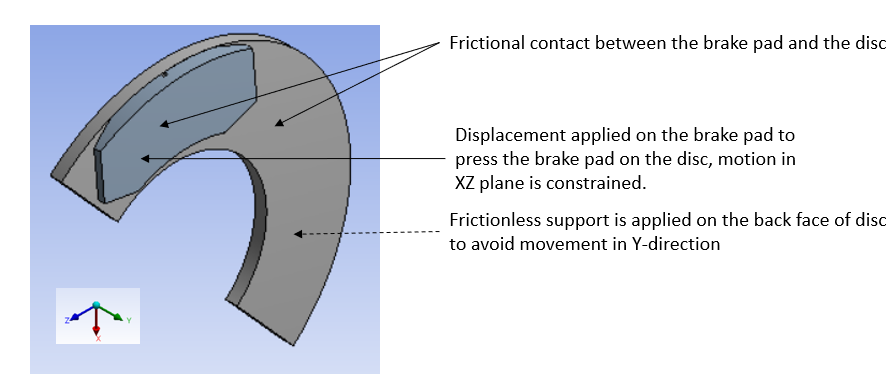
图 2 制动盘与制动组件的接触及约束设置
6、参照图 3,通过远程位移载荷为制动盘施加旋转工况。
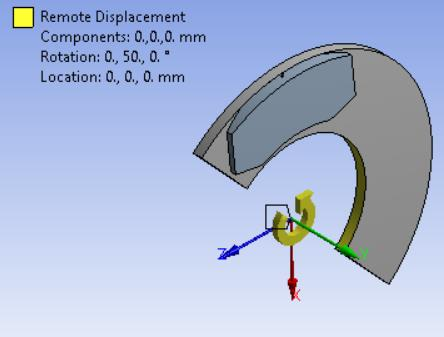
图 3 载荷施加
7、对模型划分网格并运行仿真,绘制变形云图、应力云图与约束反力。
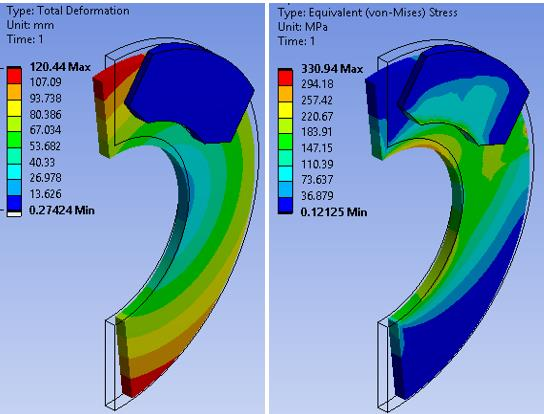
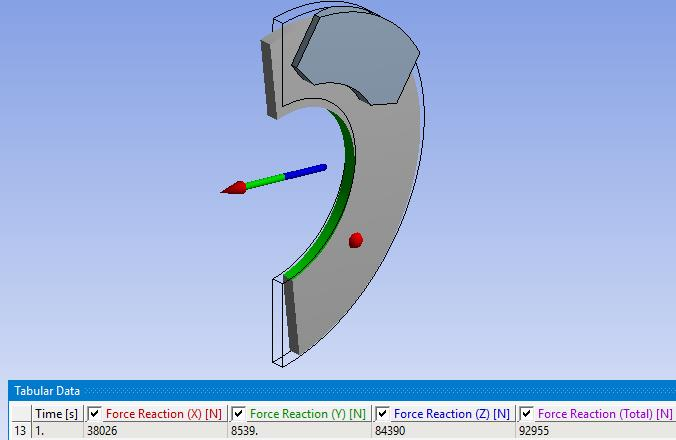
图 4 总变形、等效应力与约束反力云图
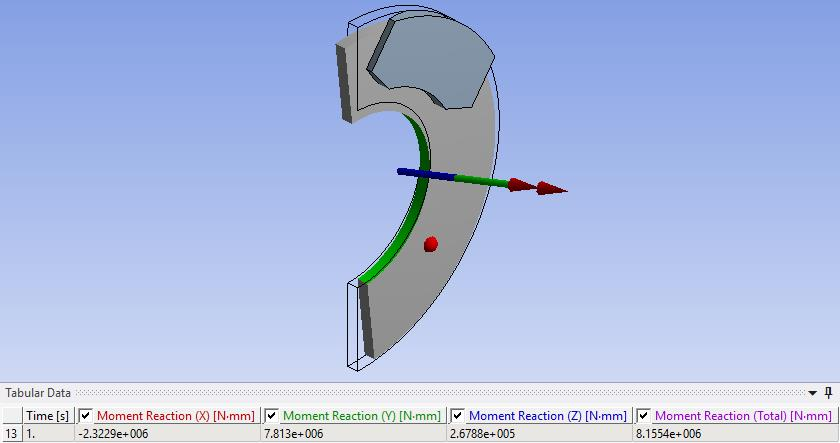
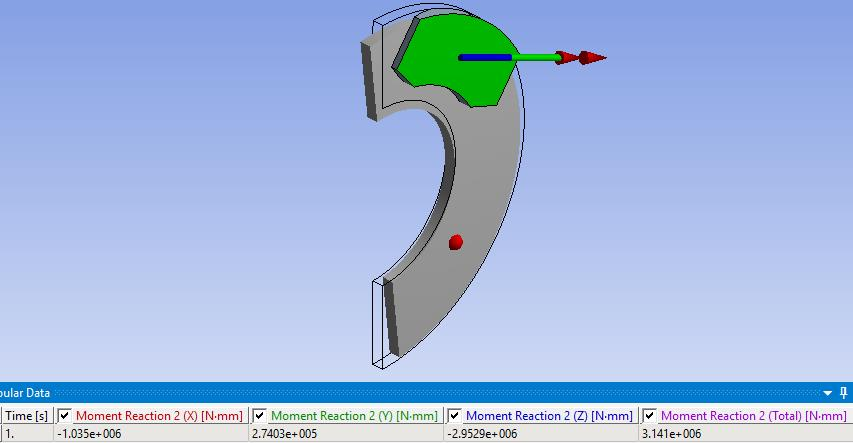
图 5 约束反力矩图谱
总结:
本案例完成刹车片变形、应力、约束反力与约束反力矩的仿真测算。