摘要:随着智能交通和自动驾驶技术的快速发展,车辆在复杂道路环境中实现安全、平稳和高精度的路径跟踪与避障控制成为研究热点。
作者:Bob(原创)
项目概述
自动驾驶技术已成为未来智能交通系统的重要组成部分,其核心问题之一是如何在复杂道路环境中实现车辆的高精度路径跟踪与安全避障。传统的路径跟踪方法(如纯追踪、Stanley 算法)虽然实现简单,但难以同时处理车辆动力学约束和复杂障碍物环境。相比之下,模型预测控制(Model Predictive Control, MPC)凭借其在约束处理和滚动优化方面的优势,已逐渐成为自动驾驶运动控制的研究热点。
在现有研究中,线性 MPC 因计算简单被广泛应用,但在大转角、非线性车辆动力学显著的情况下,其控制性能受到限制。非线性 MPC(Nonlinear MPC, NMPC)通过直接引入非线性车辆模型,更能准确描述车辆运动特性,从而在保证可行性的同时提升控制精度。然而,NMPC 的实时性与求解复杂度仍是实现中的挑战。
本文针对上述问题,基于 NMPC 设计了一种自动驾驶路径跟踪与避障控制器。具体工作包括:建立车辆非线性单轨动力学模型;在考虑速度、加速度、转向角速度等约束条件下,构建以轨迹跟踪误差最小化为目标的优化问题;利用 MATLAB 与 CasADi 工具进行非线性优化求解;通过仿真实验验证控制器在路径跟踪精度、避障性能及约束满足方面的有效性。研究结果表明,该控制方法能够兼顾安全性与实时性,为自动驾驶车辆的运动控制提供了有力支持。
系统设计
本系统旨在实现基于非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)的自动驾驶路径跟踪与避障功能。系统的核心目标是在满足车辆动力学约束与输入约束的条件下,实时优化控制输入(纵向加速度与横向转向速率),使车辆能够精确跟踪参考路径并安全绕过障碍物。

图1 系统整体流程图
硬件配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
表1 惠普(HP)暗影精灵10台式整机配置(系统硬件配置)
软件环境
对本实验所需的各类软件及工具的基本信息进行了清晰汇总。

表2 系统软件配置(真实运行环境)
运行展示
运行main_NMPC.m
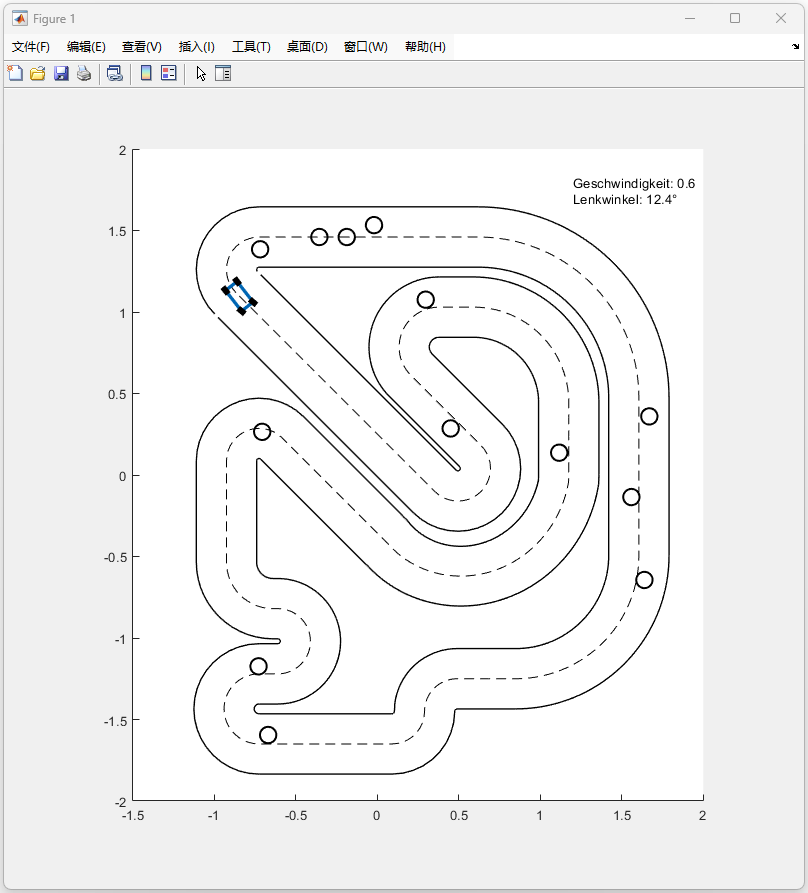
图2 基于非线性MPC的自动驾驶路径跟踪与避障仿真结果
图展示了车辆在非线性MPC控制器作用下沿赛道中心线进行路径跟踪的过程,同时实现对静态障碍物的有效避让。黑色实线为赛道边界,虚线为参考中心线,圆圈表示障碍物位置。蓝色矩形代表车辆当前姿态,红色轨迹为预测路径。图右上角的文本显示了当前车辆速度(0.6 m/s)和前轮转向角(12.4°)。从图中可以看出,车辆能够在约束条件下保持较高的路径跟踪精度,并在遇到障碍物时进行避让,验证了基于NMPC控制方法的有效性和可行性。