一句话要点:
人类智能天然在一个『多世界 × 多层次』的世界模型里工作;机器人只有跨进同一类世界模型结构,才有可能成为标志性的『下一代机器人』。
一、理解多世界和多层次(MxM)世界模型
• 多世界(multi-world):
人类同时活在不同"类型"的世界 里,并能在它们之间切换和对齐:这些不是抽象层次,而是并行存在的"不同规则集合" 。
-
物理世界 :空间、力学、摩擦、视野遮挡......
-
任务世界 :当前任务、目标、优先级("送这件货比那件更急")。
-
社会互动世界 :礼让、眼神暗示、习惯动作("他让我先走")。
-
制度与规范世界 :法律、公司制度、SOP、安全红线。
-
符号/数字世界 :地图、界面、工单、文档、知识库。
• 多层次(multi-level):
在每个"世界"内部,人类又有多种抽象层和时间尺度 :"世界"是"规则域", "层次"是"在这些规则域上,按不同时间/抽象尺度组织认知"。
-
即时反射层 :毫秒级动作反应(急刹、躲避)。
-
技能/例行层 :熟练套路(拐弯、装卸、过门、换道)。
-
任务/规划层 :几分钟到几小时(排路线、选策略)。
-
情境/叙事层 :理解"现在是个什么场合、要演什么角色"。
-
规范/反思层 :意识到"这样做是否违反规则/价值",调整策略。
二、人类为什么用的是"多世界 × 多层次"结构?
简单说,人类在现实里要同时解决三件事:
-
物理上能生存 (不过载、不冲撞、不掉坑)
-
任务上有用 (把东西送到、把活干完)
-
社会与制度上无事故 (不违法、不越矩、不被投诉)
这三件事任何一条出问题,你就无法算"智能地"完成任务。于是人类的认知结构自然演化成:
• 在多种"规则世界"中生存 (物理 / 社会 / 制度 / 符号...),
• 在多种时间尺度上调整策略 (反射--技能--规划--反思),
• 且要在它们之间持续对齐 (比如"虽然我能跑的快一点,但有些场合不一定允许我步")。
这就是所谓的"多世界 × 多层次"的世界模型。
三、这为什么会确定下一代机器人的认知门槛?
因为下一代机器人要在同一个现实世界 里和人类共事、共存,它面临的不是"单一游戏规则",而是:
• 多种世界并存且经常冲突
• 物理上"能过得去"的动作,可能违反安全制度 ;
• 制度允许的动作,在物理条件 下可能根本做不到;
• 任务最优路线,可能引发人群恐慌或社会不适 。
• 多种层次协同
• 即时控制要 obey 物理极限;
• 技能层要在噪声与不确定中保持稳定;
• 任务层要在订单/调度上优化;
• 叙事/规范层要能解释:"我为何这样做?是否合规?"
如果机器人只具备:
• 单世界 + 单层次 的模型:
• 只看几何/轨迹的"物理世界 + 控制层",
• 或只看订单/路径的"任务世界 + 规划层",
那它就必然在某处爆雷 :
要么安全事故 (忽视制度/人类习惯),
要么运营事故 (无法融入组织流程),
要么治理事故 (无法解释和追责,系统不可控)。
所以:
人类多世界×多层次的认知结构,就是对"什么样的机器人才算能在真实社会长期运行"给出的下限: 至少要能在若干关键世界和关键层次上,复制出可治理的闭环。
在具身机械主义的解释方法论里,这个认知结构也可以表述为:
能否在多世界×多层次上构建一个
E--A--O × Closed Loop × Constraints × Governance 的稳定机制。
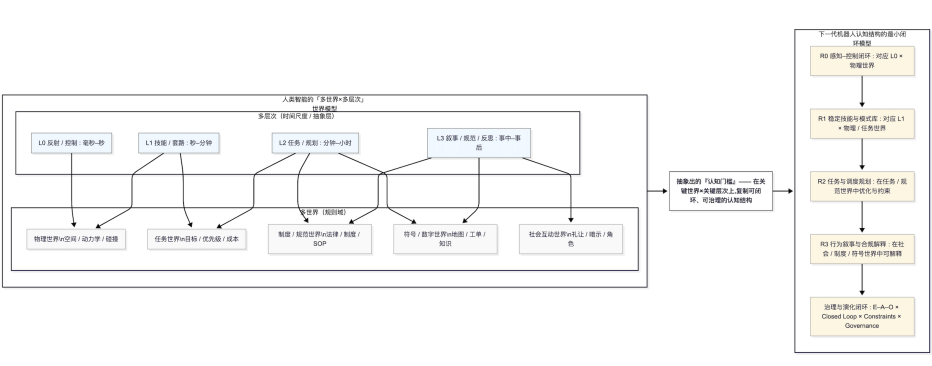
四、落到工程上:这个多世界多层次的世界模型具体长成什么样?
如果把它变成对"下一代机器人"的设计要求,大致是:
- 世界维度上的最低配置 (示意)
• 至少显式区分并建模:
(1)物理世界(空间、动力学、碰撞、安全距离)
(2)任务世界(订单、优先级、成本、SLA)
(3)社会互动世界(让行规则、暗示、礼貌模式)
(4)制度/规范世界(法律、标准、内部SOP、安全红线)
• 并有一层**"映射/对齐层"**:把一个世界的约束翻译到另一个世界的可执行策略上。
- 层次维度上的最低配置
• L0:感知--控制闭环层 (毫秒--秒)
• L1:技能/局部策略层 (秒--分钟)
• L2:任务/调度层 (分钟--小时)
• L3:规范/叙事与解释层 (事中 + 事后)
每一层都要能接入约束与治理:
• 有可观测指标 (证据链)
• 有退化与保护模式
• 有版本与回归门禁
- 多世界 × 多层次的耦合要闭环、可治理
• 不是"多堆几个模块、多弄几个端到端",而是:
• 决策前:就已经显式检查多世界的约束(物理可行 + 制度可行 + 社会可接受);
• 执行中:不同层次的 loop 互相监控与约束(技能层发现超出物理极限,能逼停任务层;规范层发现风险事件,能触发策略降级);
• 事后:有完整 evidence,可以追问"在哪个世界、哪一层的机制失效了"。
只有当机器人做到这种认知结构的提升, 我们才说它跨过了 成为下一代机器人的 "认知门槛" :
• 不只是"能完成 demo 任务",
• 而是能在多世界、多层次、多约束下长期稳定存在,并被人类社会治理和信任。