一、算法简介
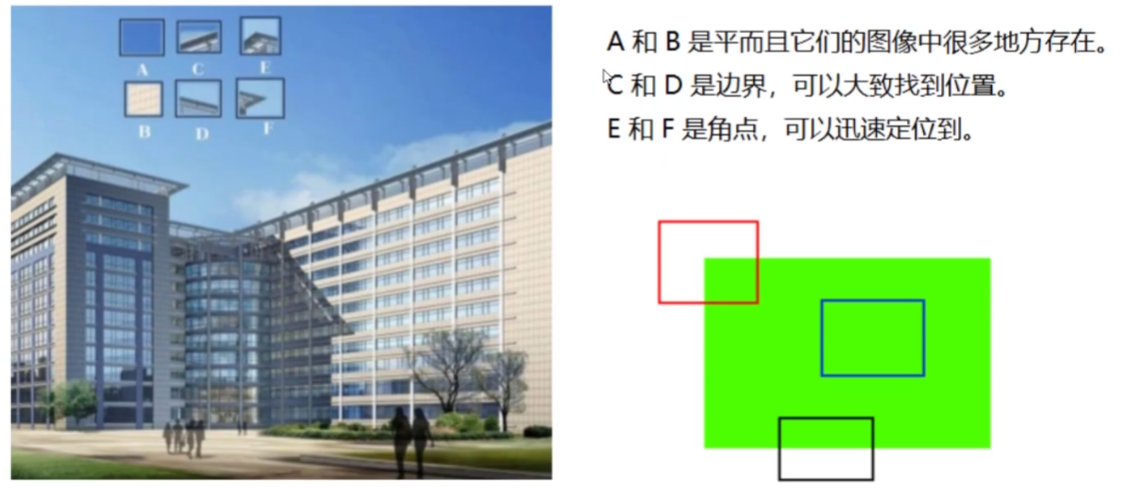
角点是图像中极具辨识度的特征点,其核心特点是沿水平和竖直方向移动时, 灰度值 会发生剧烈变化(区别于平面区域的灰度基本不变、边界区域仅单一方向变化)。Harris 角点检测算法是一种经典的基于灰度图像的角点提取方法,通过数学建模量化像素区域的灰度变化特征,精准识别图像中的角点。
该算法具有旋转不变性(角点特征不受图像旋转影响)、计算效率高、鲁棒性强等优势,广泛应用于图像匹配、目标跟踪、三维重建等计算机视觉任务中,是入门图像特征提取的核心算法之一。
二、原理解析
1.核心思想
Harris 角点检测的本质是:通过滑动窗口分析 像素 区域的灰度变化,利用数学模型判断区域类型(平面、边界、角点)。
2.数学建模过程
1.灰度变化描述对于图像中的一个小窗口(如 3×3 区域),当窗口沿 x 方向平移 Δx、沿 y 方向平移 Δy 时,定义灰度变化量 E (Δx,Δy) 为: (原来的值减去平移变换之后得到的值)

-
其中,I (u ,v ) 是窗口内原始像素的灰度值,I (u +Δx ,v +Δy) 是平移后像素的灰度值;
-
W (u ,v) 是窗口权重(通常采用高斯权重,使窗口中心像素对结果影响更大,边缘像素影响更小);
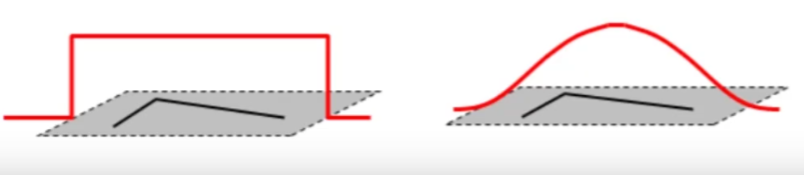
- 平方项用于将灰度变化统一为非负值,突出变化幅度。
2. 泰勒展开化简当平移量 Δx、Δy 较小时,利用一阶泰勒展开近似灰度值变化:

-
Ix 和 Iy 分别是像素在 x、y 方向的灰度梯度(可通过 Sobel 算子计算)。代入灰度变化公式后化简 这个变化项目带到上面的灰度计算公式中
-

- 其中 M 矩阵是 2×2 实对称阵,由梯度的二阶矩构成:M =∑u ,vW (u ,v )*Ix* 2*IxIyIxIyIy*2

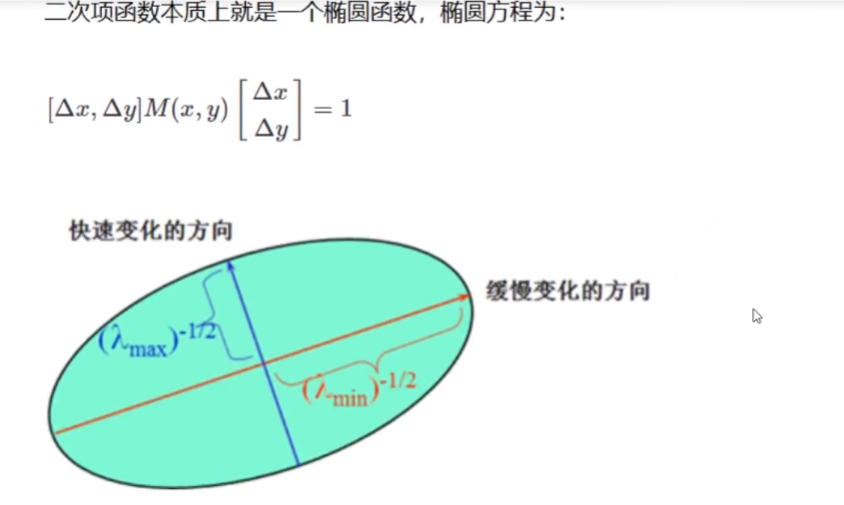
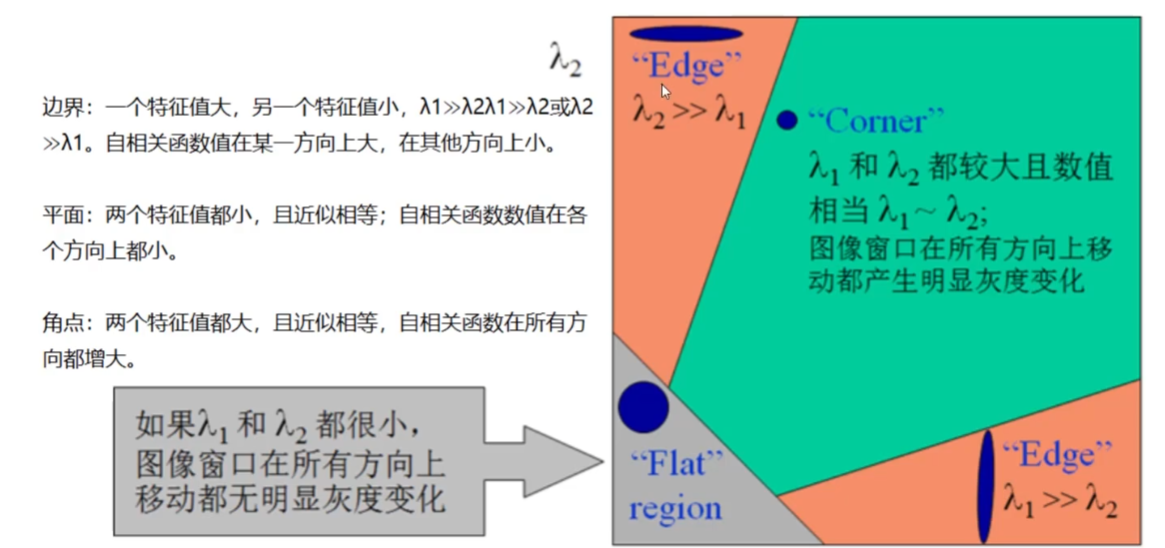
3. 特征值 **判断区域类型:**实对称矩阵 M 可通过对角化得到两个特征值 λ₁和 λ₂,其大小直接反映窗口的灰度变化特性:
-
平面区域:λ₁和 λ₂均很小(灰度变化微弱);
-
边界区域:一个特征值很大,另一个很小(仅单一方向有灰度变化);
-
角点区域:λ₁和 λ₂均很大(两个方向均有剧烈灰度变化)。
4.角点响应函数为了量化判断角点,定义角点响应值 R:

-
det (M )=λ 1⋅λ2(矩阵行列式);
-
trace (M )=λ 1+λ2(矩阵迹);
-
k 是经验常数,通常取值范围为 0.04~0.06(OpenCV 默认值 0.04)。判定规则:
-
R ≈ 0 → 平面区域;
-
R < 0 → 边界区域;
-
R > 0 → 角点区域。
三、代码实现步骤
(一)OpenCV 核心函数解析
OpenCV 提供cv2.cornerHarris()函数直接实现角点检测,参数说明如下:
python
cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]])-
src:输入图像(必须是单通道灰度图,数据类型 为 float32); -
blockSize:角点检测的窗口大小(如 2、3,即分析该大小的邻域区域); -
ksize:计算梯度时使用的 Sobel 算子核大小(通常取 3,必须为奇数); -
k:角点响应函数中的经验常数(默认 0.04,推荐 0.04~0.06); -
dst:输出的角点响应图(与输入图像尺寸相同); -
borderType:边界处理方式(默认无需修改)。
(二)完整代码示例
以国际象棋棋盘(黑白对比强烈,适合角点检测)为例:
python
import cv2
import numpy as np
# 1. 读取图像并预处理
img = cv2.imread("chessboard.jpg") # 读取彩色图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图
gray = np.float32(gray) # 转换为float32格式(函数要求)
# 2. 调用Harris角点检测函数
block_size = 2 # 窗口大小
ksize = 3 # Sobel算子核大小
k = 0.04 # 经验常数
dst = cv2.cornerHarris(gray, block_size, ksize, k)
# 3. 膨胀处理(增强角点显示效果)
dst = cv2.dilate(dst, None)
# 4. 设定阈值,标记角点(用红色标注)
threshold = 0.01 * dst.max() # 阈值设为最大响应值的1%(可调整)
img[dst > threshold] = [0, 0, 255] # BGR格式,红色标记角点
# 5. 显示结果
cv2.imshow("Harris Corner Detection", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 保存结果
cv2.imwrite("chessboard_corners.jpg", img)三)代码关键说明
-
图像预处理:必须将彩色图转为灰度图,并转换为 float32 格式,否则函数会报错;
-
阈值选择:采用 "最大响应值的百分比" 作为阈值(而非固定值),适配不同图像的灰度特性;
-
膨胀操作:通过
cv2.dilate()扩大角点响应区域,让标注的角点更清晰可见。
四、示例与效果展示
(一)测试图像
选择国际象棋棋盘(512×512 像素,彩色图),棋盘的黑白格子交点是典型的角点,适合验证算法效果。
(二)检测效果
-
输入图像:512×512×3 的彩色棋盘图;
-
输出图像:黑白棋盘上的所有交点被红色圆点标记,角点定位精准,无明显遗漏或误检;
-
若阈值调整为 0.05×dst.max (),会过滤掉部分弱响应点,角点更稀疏;阈值过低则会出现冗余标记。
(三)其他场景测试
-
建筑图像:能准确检测墙体转角、窗户边角等角点;
-
自然场景(如树木):会检测到树枝分叉点等角点,但由于纹理复杂,可能存在少量误检;
-
低分辨率图像:角点响应值会降低,需适当调整阈值和窗口大小。
五、总结与应用建议
(一)算法优势与局限
-
优势:
-
旋转不变性:角点检测结果不受图像旋转影响;
-
计算高效:基于梯度和矩阵运算,适合实时处理;
-
鲁棒性强:对光照变化、轻微噪声有一定容忍度。
-
-
局限:
-
尺度敏感:对不同尺寸的角点检测效果差异较大(需结合尺度空间改进);
-
对强噪声敏感:噪声会干扰梯度计算,导致误检。
-
(二)实际应用场景
-
图像匹配:如全景图拼接、特征点匹配(角点作为关键匹配点);
-
目标跟踪:通过跟踪目标的角点特征,实现目标运动轨迹监测;
-
三维重建:利用不同视角的角点对应关系,恢复场景的三维结构;
-
相机标定:如棋盘格角点检测是相机内参标定的核心步骤。
(三)实践建议
-
参数调整技巧:
-
blockSize:小窗口(2~3)适合检测细小额点,大窗口(5~7)适合粗大额点; -
ksize:默认 3 即可,若图像噪声大,可增大至 5; -
k:默认 0.04,若角点过少可减小至 0.03,若误检过多可增大至 0.06。
-
-
预处理优化:
-
对噪声较大的图像,先使用高斯模糊(
cv2.GaussianBlur())降噪,再进行角点检测; -
确保输入图像灰度分布均匀,避免强光或阴影导致的灰度失真。
-
-
后处理优化:
-
非极大值抑制:过滤相邻的冗余角点,保留唯一的峰值响应点;
-
阈值自适应:根据图像灰度统计特性动态调整阈值,提升检测通用性。
-