https://youtu.be/Y6AUsB3RUhA?si=3rr8dap0OJKf7gtg
视频内容大纲总结
-
00:00:00 \~ 00:01:00 开场介绍及会议氛围
讲者介绍了会议的友好氛围,强调不仅仅是观看技术内容的视频,更重要的是交流和互动,包括晚餐和饮品时的讨论,为后续内容打下良好基础。
-
00:00:39 \~ 00:01:50 讲者背景介绍及机器人软件分类
讲者自我介绍为一名机器人软件顾问,现任Flex Solutions首席机器人专家,曾服务于多家机器人及相关行业公司。
他将机器人软件大致分为两类:
- 机器人无关的软件,设计为可跨多种机器人平台使用,通常在运行时加载机器人描述文件,需要大量运行时决策,典型代表有ROS、Drake、Ignition Gazebo等。
- 针对特定机器人硬件的专用软件,代码高度优化,针对特定硬件架构,通常由硬件公司内部维护,适合实时控制,开发成本高,导致机器人造价昂贵。
-
00:02:25 \~ 00:04:07 Flex机器人案例及软件设计理念
通过展示客户Matt在圣地亚哥USS Midway航母博物馆使用Flex机器人进行操作和检查的实例,讲者说明该机器人硬件嵌入了大量处理器,硬件设计长期稳定不变,因此软件可以针对特定硬件做高度优化,但仍希望软件具备一定的通用性,以便移植到其他机器人平台。
-
00:04:18 \~ 00:06:59 机器人硬件和软件开发周期及发布频率
机器人硬件开发周期长,通常数年设计定型后硬件不再变化,例如Boston Dynamics的Spot于2016年公布,2019年首发。软件发布频率远高于硬件更新频率,软件迭代快且频繁。
讲者的目标是编写既能跨平台通用又能针对单一机器人高效执行的"零开销抽象"代码,利用编译期融合机器人规格与程序,提升性能与安全性。
-
00:06:19 \~ 00:09:05 实时软件基础及分类
实时软件定义为对已知输入能产生确定性输出,且在指定时间内完成。
实时软件分为三类:
- 硬实时:错过时间节点即程序错误,可能导致系统停止或安全机制启动。
- 坚实时:结果逾期即视为无效,但系统可继续运行,如工业焊接瑕疵产品可丢弃。
- 软实时 :尽量准时完成,延迟不会致命,但会影响用户体验,如音视频延迟导致卡顿。
机器人实时软件通常运行于实时操作系统或裸机嵌入式设备,避免动态内存分配、异常抛出及锁等非确定性操作,关注CPU和内存预算。
-
00:08:31 \~ 00:11:28 为什么C++适合实时机器人软件
C++被广泛应用于机器人软件开发,原因包括:
-
标准化的语言规范,代码可预测且行为确定。
-
编译器成熟,支持严格警告标志(如-Wpedantic),方便满足监管机构要求。
-
强类型安全机制,有助于大型团队利用工具验证代码状态。
-
性能优越,能满足嵌入式硬件资源限制。
劣势是部分机器人公司不使用STL,因其在安全关键环境下动态内存分配和锁的使用不确定。建议引入如const_mem或no_except等约束,保障不使用动态分配,方便向监管机构证明代码合规。
-
00:10:51 \~ 00:15:36 编译期优化示例:环形缓冲区设计
讲者以典型的环形缓冲区(ring buffer)为例,展示如何利用模板元编程实现编译期优化:
-
利用模板参数确定缓冲区大小,根据大小选择合适的整型(如uint8_t、uint16_t等)来存储索引,减少内存开销。
-
实现模板参数化的"填充行为"(fill behavior),决定缓冲区满时是丢弃旧数据还是覆盖旧数据。避免在运行时抛出异常,确保实时性。
-
通过枚举类限制fill behavior的选项,避免用户传入不合法的行为,增强库的健壮性。
-
00:15:47 \~ 00:19:59 机器人运动学基础与编译期实现
以Flex机器人的运动控制为例:
-
介绍前向运动学(forward kinematics)概念,即根据关节位置计算机器人每个连接体的位置和姿态。
-
关节类型包括旋转关节(revolute joint)、滑动关节(prismatic joint)和固定关节(fixed joint),每种关节有不同的运动限制。
-
运动学计算依赖于几何变换(rotation和translation),通过多级变换累积得到最终位姿。
-
传统做法是运行时使用std::variant等机制处理多种关节类型,但存在运行时开销和潜在错误。
-
通过模板元编程,利用if constexpr和模板参数在编译期确定关节类型,避免运行时多态开销,提升执行效率。
-
进一步利用模板参数传入固定变换,允许在编译期对算法进行高度定制和优化。
-
00:20:53 \~ 00:27:51 运动学代码对比与编译期代码优势
-
使用传统运行时方案(std::variant、std::vector)需要动态内存分配、类型访问检查、异常处理等,增加运行时负担。
-
编译期方案通过模板展开和折叠表达式(fold expressions),直接在编译期完成类型分发和运算,生成的汇编代码更简洁高效。
-
以3关节机器人为例,编译期代码生成更少汇编指令,且不存在运行时错误可能性,便于安全认证。
-
规模扩大到9关节时,编译期代码汇编体积增大,但依然避免了运行时容器和异常的开销。
-
关节限制(limits)也可通过模板参数传入,实现编译期位置限制检查,如使用std::clamp或自定义模运算,进一步提升安全性和效率。
-
00:28:04 \~ 00:34:20 碰撞检测算法及编译期实现思路
-
介绍机器人自碰撞检测问题,区别于与环境的碰撞。
-
每个机器人连接体可由多个碰撞形状组成,简单几何碰撞的计算可以简单快速完成。
-
传统运行时实现依赖多态形状接口和运行时类型判断,性能开销大且复杂。
-
通过编译期实现,可以为每种形状配备特化的碰撞函数,无需运行时类型判断。
-
利用C++23新特性(如Cartesian product等)和折叠表达式,实现所有形状两两组合的碰撞判断。
-
讲者承认当前示例为N^2检查,存在重复计算,鼓励观众后续优化。
-
总结强调硬件公司软件发布频率远高于硬件,利用编译期元编程技术能极大提升代码效率和安全性,建议多用编译期特性构建描述性强的类型。
-
00:34:15 \~ 00:39:23 问答环节:折叠表达式细节及编译时间开销
- 折叠表达式详细说明
讲者演示如何用make_index_sequence辅助从元组中展开参数,结合折叠表达式展开调用前向运动学函数,将不同类型关节的位姿计算合并。 - 编译时间和二进制大小问题
在嵌入式平台编写模板代码时未感受到明显编译时间膨胀,但要注意二进制过大问题。 - 关节位置数组中固定关节空位问题
固定关节不产生位置值,数组中存在占位,但可通过模板约束(concepts)和可用性限制等方式避免无效元素,减少冗余。
讲者坦言示例代码为讲解方便故意简化,实际项目可进一步优化。
综合总结
本视频围绕使用C++编译期特性优化机器人实时控制软件展开,结合实践案例展示了如何减少运行时决策、避免动态内存和异常使用,从而提升机器人软件的性能、确定性和安全性。讲者强调机器人硬件通常多年不变,软件迭代频繁,利用编译时融合机器人规格与应用代码的思路,能有效降低开发成本和提升产品可靠度。通过环形缓冲区设计、前向运动学计算和碰撞检测示例,演示了模板元编程和折叠表达式在机器人软件中的强大应用。问答环节则深入探讨了具体技术细节和实际应用中可能遇到的问题,为机器人软件开发者提供了宝贵的实战经验和思路启发。
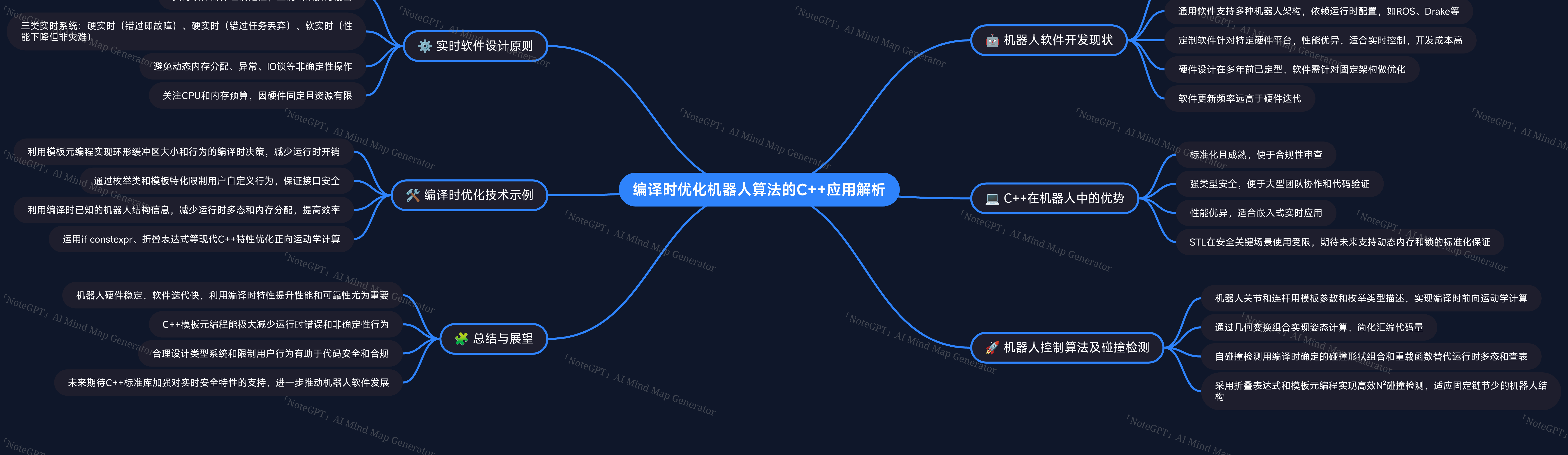
编译时优化机器人算法的C++应用解析框架
🤖 机器人软件开发现状
- 机器人软件分为通用型和硬件定制型两类
- 通用软件支持多种机器人架构,依赖运行时配置,如ROS、Drake等
- 定制软件针对特定硬件平台,性能优异,适合实时控制,开发成本高
- 硬件设计在多年前已定型,软件需针对固定架构做优化
- 软件更新频率远高于硬件迭代
⚙️ 实时软件设计原则
- 实时软件需保证确定性,正确结果按时输出
- 三类实时系统:硬实时(错过即故障)、硬实时(错过任务丢弃)、软实时(性能下降但非灾难)
- 避免动态内存分配、异常、IO锁等非确定性操作
- 关注CPU和内存预算,因硬件固定且资源有限
💻 C++在机器人中的优势
- 标准化且成熟,便于合规性审查
- 强类型安全,便于大型团队协作和代码验证
- 性能优异,适合嵌入式实时应用
- STL在安全关键场景使用受限,期待未来支持动态内存和锁的标准化保证
🛠️ 编译时优化技术示例
- 利用模板元编程实现环形缓冲区大小和行为的编译时决策,减少运行时开销
- 通过枚举类和模板特化限制用户自定义行为,保证接口安全
- 利用编译时已知的机器人结构信息,减少运行时多态和内存分配,提高效率
- 运用if constexpr、折叠表达式等现代C++特性优化正向运动学计算
🚀 机器人控制算法及碰撞检测
- 机器人关节和连杆用模板参数和枚举类型描述,实现编译时前向运动学计算
- 通过几何变换组合实现姿态计算,简化汇编代码量
- 自碰撞检测用编译时确定的碰撞形状组合和重载函数替代运行时多态和查表
- 采用折叠表达式和模板元编程实现高效N²碰撞检测,适应固定链节少的机器人结构
🧩 总结与展望
- 机器人硬件稳定,软件迭代快,利用编译时特性提升性能和可靠性尤为重要
- C++模板元编程能极大减少运行时错误和非确定性行为
- 合理设计类型系统和限制用户行为有助于代码安全和合规
- 未来期待C++标准库加强对实时安全特性的支持,进一步推动机器人软件发展
编译时优化机器人算法的C++应用解析
🤖 机器人软件开发现状
- 通用机器人软件特点与代表项目
- 硬件定制软件的性能优势与成本
- 硬件设计的长期稳定性
- 软件与硬件的迭代频率对比
⚙️ 实时软件设计原则
- 实时软件定义及分类
- 硬实时、准实时与软实时的区别
- 避免非确定性操作的必要性
- 资源限制下的性能优化目标
💻 C++在机器人中的优势
- 标准化及可验证性
- 类型安全对大型团队的帮助
- 性能优势与嵌入式适应性
- STL在安全关键场景的局限与改进方向
🛠️ 编译时优化技术示例
- 环形缓冲区的编译时大小选择与行为定制
- 模板特化与枚举类保障接口安全
- 编译时已知结构消除运行时开销
- 现代C++特性在运动学中的应用
🚀 机器人控制算法及碰撞检测
- 关节和连杆的类型化表示
- 几何变换组合优化
- 碰撞检测的编译时实现方案
- 折叠表达式应用于碰撞检查
🧩 总结与展望
- 软件迭代快,编译时优化价值高
- 模板元编程提升代码安全性
- 类型系统设计对用户行为约束
- 标准库未来对实时安全的支持预期