当人形机器人从实验室的演示场景步入真实世界的复杂环境,如何让它"感知"到每一次接触的轻重,成为了决定其能否实用的关键。高工机器人产业研究所(GGII)近期数据显示,2025年,中国人形机器人领域六维力传感器的出货量预计将实现超过5倍的增长。这个数字背后,隐藏着一个正在深刻影响行业的技术抉择:为机器人赋予"力觉"时,是将感知的"神经末梢"置于与外界交互的末端,还是将其"内置"于驱动关节之中,通过推算来间接感知世界?
这远非一个简单的部件选型问题,它实质上是对机器人本体设计理念、控制逻辑以及最终能力边界的一次定义。
一、 路径分野:两种技术哲学的根本差异
末端直接测量与关节内置推算,代表了两种截然不同的技术哲学。
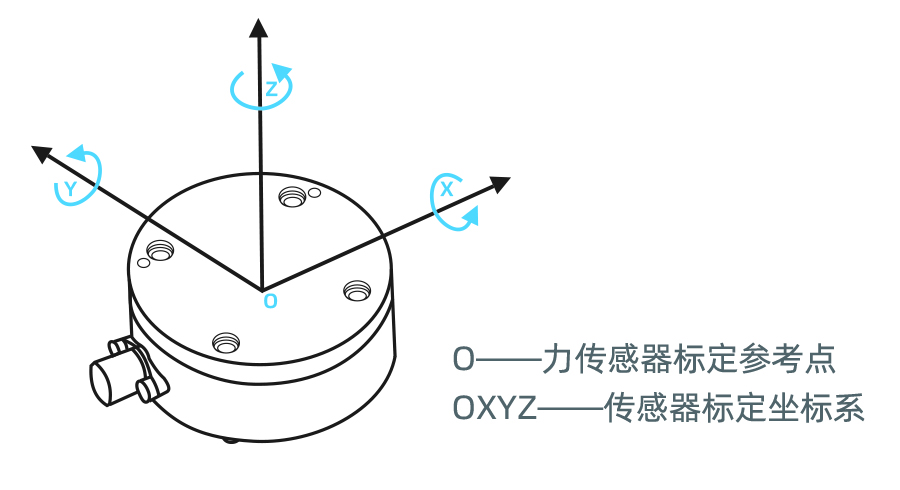
末端六维力传感器 ,遵循的是一种 "直面真实"的实证主义路径 。它被安装在机械臂的手腕或灵巧手的基部,如同人类指尖的触觉细胞,直接、无衰减地测量工具与环境相互作用产生的全部六个维度的力与力矩。其最大优势在于信号的直接性与高保真度,延迟极低,能捕捉到最微妙的力变化。这使得它在精密装配、生物样本操作等需要"手感"的任务中无可替代。然而,这种直接暴露也使其成为结构中的脆弱点,面临碰撞、过载及恶劣环境的考验,同时其增加的质量和体积也会改变末端的动态特性,对高速运动提出挑战。
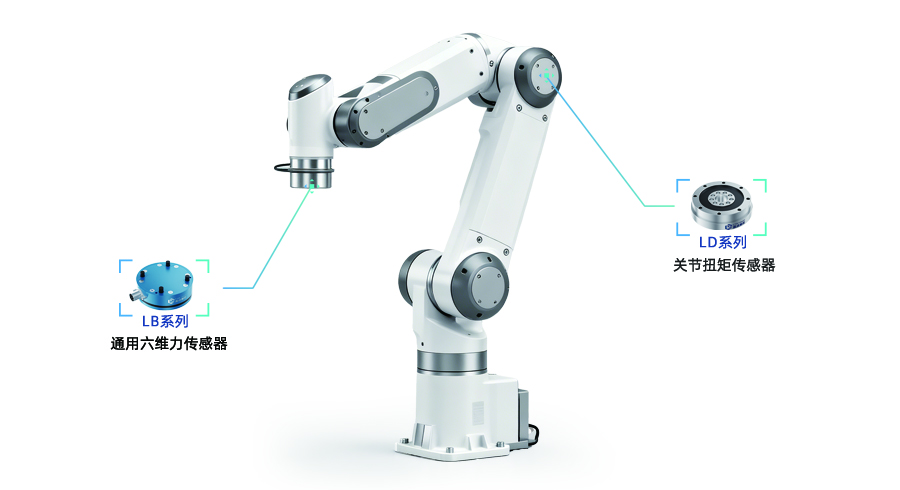
关节力矩传感器(内置推算路径) ,则体现了一种 "通过模型认知世界"的理性主义路径 。它将传感器集成在关节电机内部,通过测量输出轴的扭矩,再结合一个预先构建的、极度精确的机器人全身动力学模型,反向计算出末端所受到的外力。这种方式优雅且系统集成度高,传感器得到良好保护,有助于实现本体结构的模块化和轻量化。它为机器人提供了基础的力感知能力,使其能够实现碰撞检测、拖动示教和柔顺控制。但这条路径的基石------动力学模型的准确性------会随着机械磨损、温度变化和负载改变而漂移,任何模型误差都会在长长的运动链中被放大,导致末端力的推算值偏离真实情况。
二、 场景抉择:从应用反推技术,没有唯一答案
技术路径的选择,必须始于对机器人最终任务的深刻理解,终于对性能、可靠性与成本的整体权衡。
对于主要工作在高度结构化、任务可预测环境 中的机器人,例如完成标准化搬运、码垛或重复性装配的工业机械臂,内置推算路径通常是更经济、更稳健的选择。其核心价值在于,以可控的成本赋予了机器人基础的"安全触觉"和"柔顺性",满足了协作机器人的核心要求。实现这一路径规模化的关键,在于传感器本身出色的长期一致性、稳定性,以及能否通过高效的在线标定技术来动态修正模型参数。
而当机器人需要在开放、非结构化的环境中完成精密或灵巧的操作 时,例如未来在家庭中进行家务劳动、在实验室处理精密仪器,或在手术台上辅助医生,末端直接测量路径便成为必然选择。在这些场景中,操作的成败依赖于对毫牛级甚至微牛级力变化的即时、准确响应,任何基于模型的间接推算都因固有的延迟和不确定性而无法胜任。此时,对传感器性能的要求也达到极致:不仅需要极高的精度(全维耦合误差常需低于1%)和分辨率,还需要在复杂的电磁环境、温度波动及不可避免的偶然过载中保持稳定。
三、 融合趋势:构建层次化、冗余的力觉感知网络
行业的前沿思考与实践,正日益显示出一种超越"非此即彼"的融合智慧。最具前景的方向,是为机器人构建一个多层次、多冗余的力觉感知网络 。
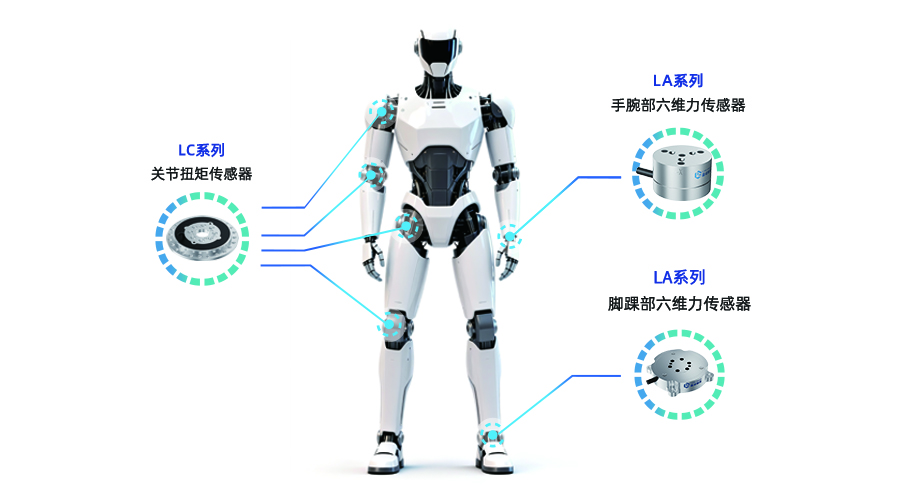
在这种先进的架构中,分布于全身各关节的内置力矩传感器 ,构成了机器人的"本体感觉系统"。它们持续监测着自身的运动状态、负载分布与能量消耗,主要负责实现高效的全身协调运动、姿态平衡与振动抑制。而位于手脚末端的六维力传感器 ,则构成了机器人的"外部触觉系统",专精于对外交互的精细感知与实时控制。两个系统的数据在中央处理器中进行深度融合与交叉验证。例如,当灵巧手进行精细拧螺丝操作时(依赖末端高精度力控),腿部和躯干的关节力矩传感器可以协同调整身体重心,提供稳定的作业平台;当系统通过关节力矩异常检测到可能发生的碰撞时,可以立即调用末端传感器的数据加以确认,并启动最合理的避让或保护策略。
技术进步本身也在促进两种路径的融合。末端传感器正朝着"感算一体"的智能化方向发展,通过内置专用微处理器,在源头完成信号调理、实时解耦与温度补偿,直接输出稳定、可靠的数据总线信号,极大减轻了主控制器的负担并提升了系统可靠性。而在内置路径上,更先进的在线参数辨识算法与自适应观测器,正在不断拉近推算值与真实值之间的距离,拓展其能力的有效边界。
四、 行业启示:从部件供应到系统级协同的必然演进
这一深刻的技术抉择,也对机器人产业的供应链关系与协同模式提出了新的要求。
对于机器人整机厂商而言,力觉路径的选择已成为其产品顶层设计的一部分。它要求研发团队具备跨学科的"系统思维",能够将机械设计、传感器特性、控制算法乃至热管理与电磁兼容性进行一体化考量。这推动了机器人开发从简单的"模块集成"向深度的"原生设计"转变。
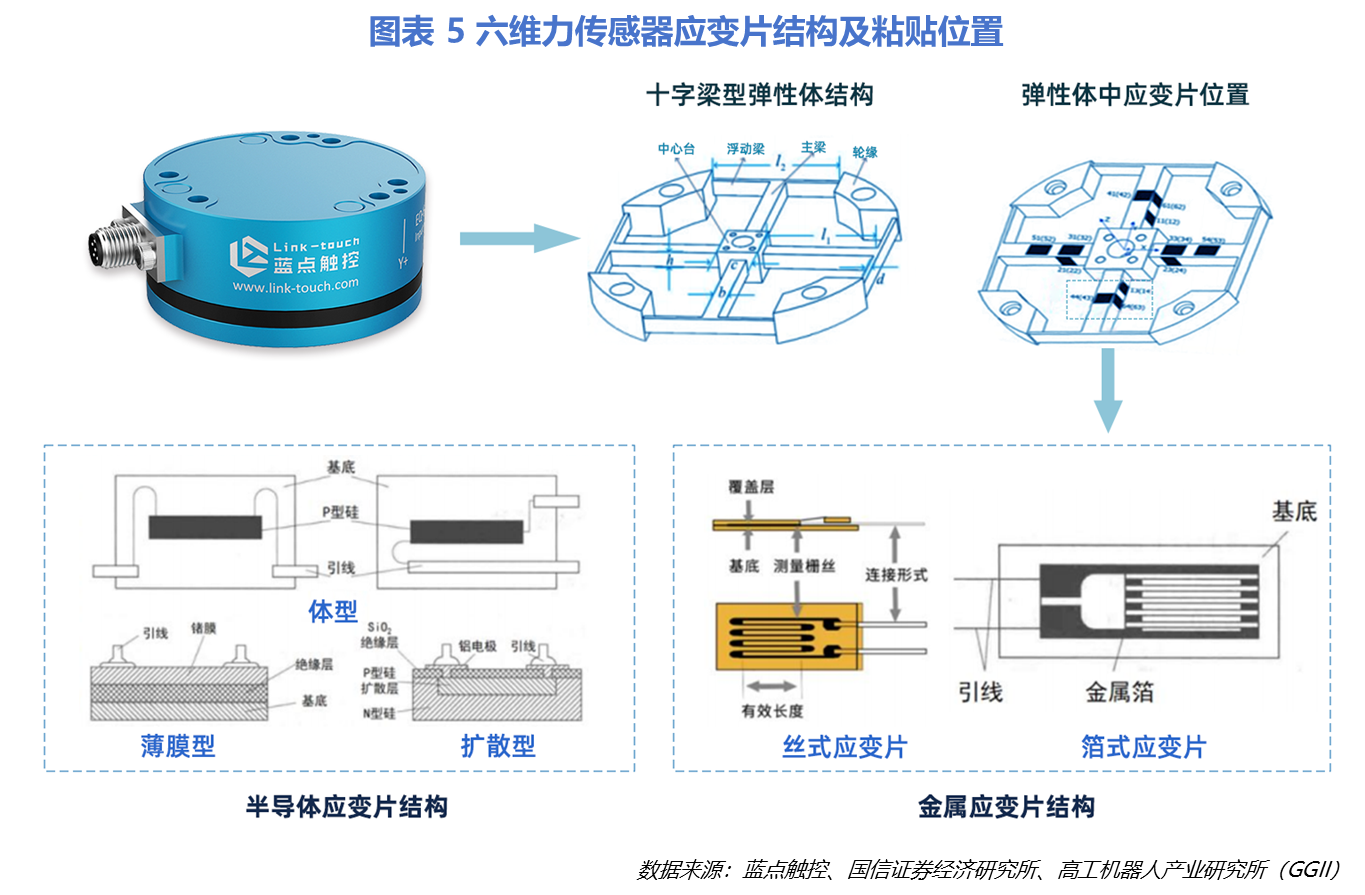
相应地,上游的核心部件供应商也必须完成从"硬件提供商"到 "系统能力伙伴" 的角色升级。未来的领导者,需要具备以下能力:在客户概念设计阶段就能参与协同仿真的前瞻性技术支持;针对特定机械结构和应用场景的快速传感器定制、标定与优化能力;提供涵盖从底层驱动、数据滤波、融合算法到标准控制接口的完整软件栈。其真正的价值,将体现在能否将复杂的物理感知问题,封装成简单、可靠、可大规模部署的解决方案工程能力上。行业内已有企业通过构建覆盖弹性体设计、嵌入式硬件、解耦算法及自动标定技术的全栈平台,将新品开发周期大幅缩短,正是这一趋势的体现。
机器人技术发展的历史,某种意义上就是其感知能力不断突破边界的历史。今天关于末端与内置的探讨,正是机器人从"执行固定轨迹"迈向"自主适应交互"这一深刻变革的核心缩影。
最终的图景已经日渐清晰:最先进的机器人将不再依赖单一的感知模式。它们将像高等生物一样,拥有分布式、多模态的"力觉神经系统"。深藏于关节处的"本体感"负责协调、高效的运动,而灵敏于末端的"外触觉"则负责探索、识别与精细操作。实现这一愿景,需要的不仅是传感器单点技术的持续精进,更是整个产业链在系统集成能力、跨域知识融合与长期工程耐心上的共同锤炼。这场关乎机器人如何"感受"世界的竞赛,其终点将是机器人与物理世界实现真正无障碍、智能化交互的时刻。