------从"稳定现象"到"可治理机制"的工程解释
引言:为什么必须把"闭环"与"世界模型"分开谈
在具身智能系统的讨论中,"世界模型(world model)"常被赋予某种中心地位:仿佛只要模型足够丰富、足够准确,系统就会自然地表现出稳定、可靠、可预测的智能行为。然而,真实工程现场反复证明:智能行为能否稳定存在,首先取决于闭环机制是否成立,其次才是闭环内部使用了怎样的世界模型。换言之,世界模型并非闭环的先验前提,而更像闭环中的一类"结构化工具"与"约束载体"。
具身机械主义(Embodied Mechanismism)将解释单位从"模块/算法"提升到"闭环机制",并进一步要求机制必须可观察、可诊断、可干预、可回归验证、可治理。由此出发,闭环与世界模型的关系不再是"一个对应一个"的静态映射,而是围绕现象稳定性 与约束可行性形成的动态、多层、多对多结构。
一、概念澄清:闭环回答"为何能稳定",世界模型回答"靠什么维持与推演"
1. 闭环:维持现象稳定的因果组织
闭环不是流程图,而是一个"因果---时间---约束"的组织形式:
感知 → 估计 → 决策/控制 → 行动 → 环境变化 → 再感知 。
但更重要的是:闭环描述的是系统如何在持续扰动下维持某种可观察现象(例如安全、吞吐、质量一致性、能耗上限、近失率分布等),以及当稳定被破坏时断点在哪里、证据链是什么、可干预手段是什么。
2. 世界模型:闭环中的结构化假设与可传播约束
世界模型可以理解为闭环内部用于支撑以下能力的结构:
-
预测:行动后果、风险、资源占用、延迟传播
-
约束传播:把安全、物理、实时、规则等约束转化为可计算结构
-
一致性协调:多主体/多层级协同下的共享语义或对齐边界
-
可解释证据:把"为什么这样做"变成可审计的结构线索
世界模型可以显式(图/状态空间/约束系统/知识图谱)也可以隐式(策略网络权重、控制律、端到端表征)。关键在于:它是闭环可行性的手段之一,而非闭环存在的理由本身。
二、为什么闭环与世界模型不是一一对应:三条工程级原因
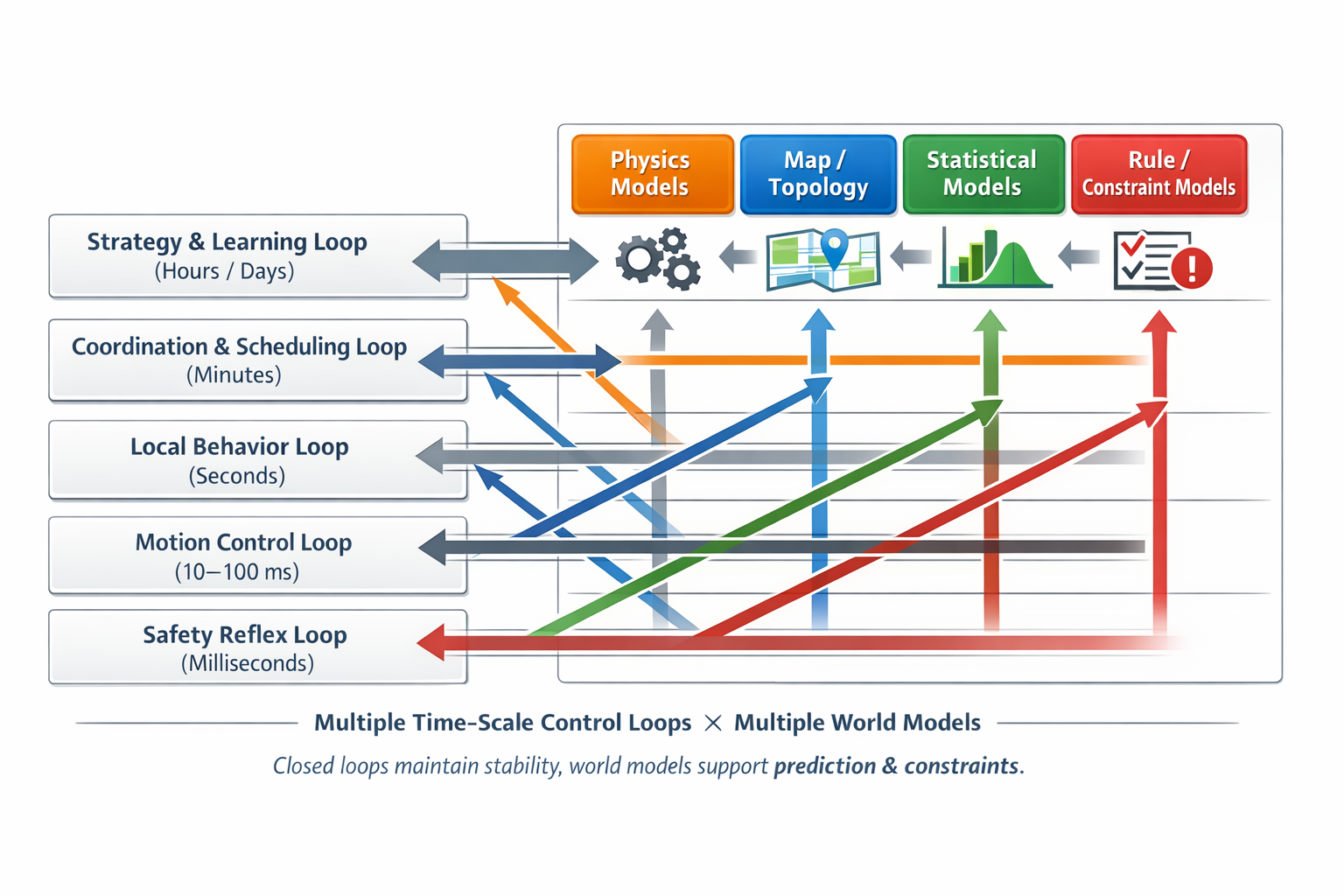
原因 1:一个闭环往往包含多个世界模型(分工 + 分层 + 分时标)
同一个"稳定现象"(例如"车队吞吐稳定且近失可控")通常需要多个子闭环协同:
-
毫秒级安全反射闭环(急停、避障)
-
秒级运动控制闭环(轨迹跟踪)
-
分钟级交通协调闭环(路权、会车、拥塞)
-
小时/周级策略优化闭环(站点布局、规则迭代、模型更新)
这些闭环内部使用的模型并不相同:安全闭环偏"最坏情况/保守模型",控制闭环偏动力学模型,协调闭环偏拓扑/规则模型,优化闭环偏统计/仿真模型。它们共同服务一个现象,但模型是"多套并存"的。
原因 2:同一个世界模型可能被多个闭环复用(同源不同责)
例如一份"厂区拓扑 + 禁行区 + 工位占用"模型:
-
给导航闭环用:可达性与代价
-
给安全闭环用:禁行区硬约束
-
给调度闭环用:瓶颈与拥塞预测
但每个闭环的节拍、失效判据、回归验证方法不同,因此复用不意味着一一对应,更不意味着"一个模型可以替代多个闭环"。
原因 3:大量关键闭环可以"弱模型化"甚至"无模型化"
工程上最可靠的闭环,往往恰恰不依赖"宏大世界模型":互锁、上限保护、看门狗、急停链、简单的局部反射控制......这些闭环依靠的是约束与证据链,而不是"世界表征的丰富性"。这也是具身机械主义强调"闭环优先、约束构成机制"的原因。
三、关系重构:把"世界模型"视为闭环中的四类角色
在工程语境里,世界模型更像四种"角色"的集合(可叠加):
-
预测器(Predictor):预测行动后果与风险传播
-
约束载体(Constraint Carrier):把不可违背的边界转化为可计算对象
-
一致性媒介(Consistency Medium):多主体协同时共享语义边界(但允许局部不一致)
-
证据结构(Evidence Structure):用于审计、追责、回归验证的可追溯结构
由此得到一个更准确的判断:
闭环决定系统"是否能稳";世界模型决定系统"如何稳、稳到什么程度、以及能否被治理"。
四、例子 1:工业 AMR 车队------"吞吐稳定"现象背后的多闭环 × 多模型
我们选一个常见目标现象:
现象 P:车队吞吐在高峰期仍维持稳定(拥塞概率受控、死锁频率低、近失分布可解释且可回归)。
1) 关键闭环拆解(按时标)
-
L0 安全闭环(毫秒级):急停/减速/避障
-
L1 运动控制闭环(10--100ms):轨迹跟踪、制动距离约束
-
L2 局部导航闭环(秒级):路径重规划、局部动态障碍处理
-
L3 交通协调闭环(10秒--分钟级):会车规则、路权分配、虚拟信号灯
-
L4 调度/运营闭环(分钟--小时级):任务分配、工位节拍对齐、WIP 控制
-
L5 治理闭环(天--周级):版本管理、场景回放、规则迭代、回归验证
2) 世界模型并非"一套",而是"按闭环职责拆分"
-
安全闭环用的模型往往是:最坏情况距离/速度上界(极保守)
-
控制闭环用:车辆动力学/摩擦/载荷模型
-
导航闭环用:几何地图 + 局部占用栅格
-
协调闭环用:拓扑图 + 路权规则模型 + 时隙占用模型
-
调度闭环用:站点产能模型 + 任务到达统计 + SLA/节拍约束模型
-
治理闭环用:场景库/回放模型 + 版本一致性模型(证据链)
你会发现:
-
同一个"吞吐稳定"现象需要多个闭环共同维持;
-
每个闭环需要的模型粒度不同;
-
有些闭环(安全互锁)甚至不需要"世界表征",只需要硬约束与证据链。
这也是为什么把"世界模型"当作系统唯一核心,会导致典型失败:模型越大越"聪明",但闭环越难验证、越难治理,最后只能靠现场运维"拍脑袋"兜底。
五、例子 2:干式变压器浇注固化------质量稳定现象背后的"工艺闭环 + 约束模型"
我们选一个更贴近你近期写作的场景:浇注---固化(含配料、浇注、固化曲线、环境与设备约束)。
目标现象
现象 Q:产品在批次间维持稳定质量(空洞率/裂纹率/介电强度分布稳定),且能耗与节拍可控。
1) 关键闭环
-
工艺执行闭环(分钟级):配方 → 参数下发 → 过程采集 → 偏差纠正
-
质量判定闭环(小时级):在线/离线检测 → 缺陷归因 → 工艺调整
-
设备健康闭环(天级):关键设备状态 → 预维护 → 过程漂移抑制
-
治理闭环(周级):配方版本、偏差审批、回放验证、合规审计
2) 世界模型在这里主要是"约束载体 + 证据结构"
在浇注固化里,最关键的世界模型不是"全世界的数字孪生",而是三类可计算约束:
-
物理/化学约束模型:温度---黏度---反应速率边界、固化窗口
-
设备约束模型:加热功率上限、腔体均匀性、传感器延迟与噪声
-
规范/治理约束模型:配方变更审批、批次追溯、回归验证覆盖率
这些模型服务于闭环的可治理性:当质量分布漂移时,能否定位是"工艺闭环断点"还是"设备闭环断点",以及能否给出可审计的证据链。
六、工程结论:用"现象 → 闭环 → 约束 → 模型角色 → 治理证据"来写系统解释
如果你要把"闭环---世界模型关系"写成可落地的工程范式,可以采用如下写作/设计顺序(也是具身机械主义强调的可操作路径):
-
先定义现象:系统要维持什么稳定模式(安全、质量、吞吐、能耗......)
-
再拆闭环:按时间尺度与责任边界拆分多个闭环
-
列约束:物理、实时、环境、规范、责任边界(这些是机制的组成部分)
-
指定模型角色:每个闭环要什么模型?是预测器、约束载体、一致性媒介还是证据结构?
-
补齐治理闭环:监测---诊断---干预---回归验证,形成可持续交付与运营一致性
这套顺序的含义是:
我们不是在"构建一个世界模型然后让系统变聪明",
而是在"构建可治理闭环以维持现象稳定,并在其中配置必要且可验证的模型结构"。