RaspberryPi-Sensor-Board V4.0
深圳市易创空间科技有限公司设计树莓派扩展板, 适用于 Raspberry Pi Zero~4B。 可以通过5.5-2.1mm的DC头或接线柱可以给树莓派供电。预留了RF24L01模块,HC-SR04超声波模块,I2C接口,UART接口,支持8路ADC。同时空出摄像头和显示屏排线接口。
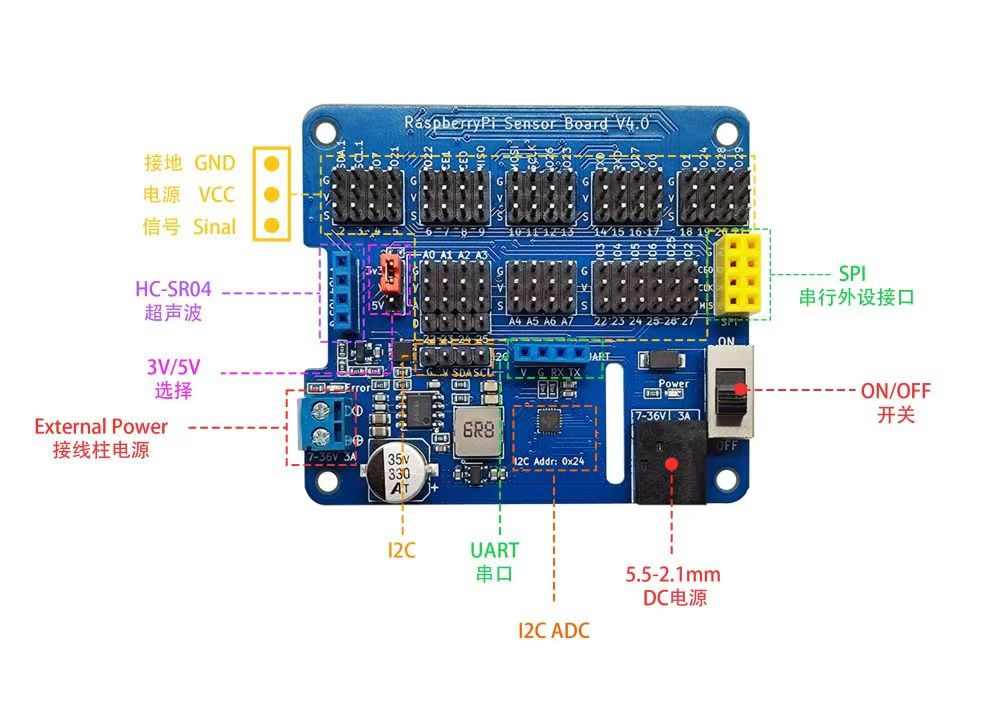
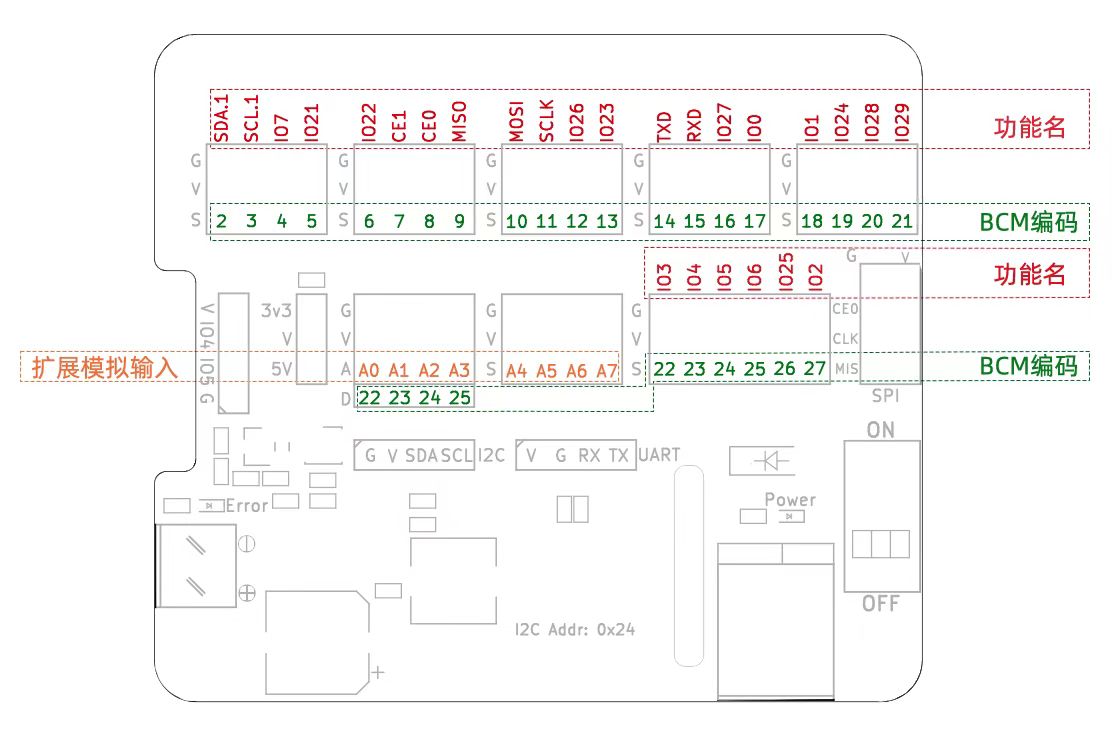
树莓派扩展板上面标注了丝印为信号引脚的BCM编码和功能名,如下图:
特点
- 内置10bit ADC MCU,支持8路ADC检测,ADC值范围为0 ~ 1023;
- 支持树莓派 2B/3B/3B+/4B/zero;
- 5.5x2.1DC头与接线端子外部供电,输入范围7~30V;
- 外接传感器供电电压3V3与5V切换;
- 板载DC-DC降压芯片最大输出5V3A给树莓派直接供电
MCU规格
- 工作电压:3.3V和5V 根据跳线帽选择ADC检测电压;
- 与树莓派通信方式: I2C 速率 1~400K;
- I2C地址: 0x24,背面可以配置地址;
- IO: 8路ADC检测 对应引脚A0~A7;
- 8路扩展模式支持ADC输入,GPIO,PWM(只A1-A2支持)
寄存器
扩展板MCU I2C地址为0x24,寄存地址说明如下:
0x01寄存器为模式设置
如下模式可以设置
|--------------|----------|-----------------------------------------------------------------------------------------------|
| 命令 | 模式 | 功能描述 |
| 0x01 | 输入上拉 | MCU内置上拉电阻使能 |
| 0x02 | 输入下拉 | MCU内置下拉电阻使能 |
| 0x04 | 浮空输入模式 | 浮空输入 |
| 0x08 | 输出模式 | 可把引脚配置为高低电平输出模式,然后使引脚输出高电平或者低电平 |
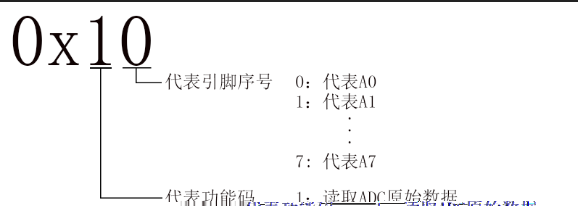
| 0x10 | ADC模式 | 可把引脚配置为ADC模式,然后读取引脚的ADC值,精度10位,ADC值范围为0 ~ 1023 |
| 0x20 | PWM 输出模式 | 可配置扩展板的PWM输出频率(1 ~ 10000Hz),然后把引脚为PWM输出模式,再配置引脚PWM输出的占空比(12位精度:0 ~ 4095),然后使引脚输出PWM,可用于驱动舵机 |
| 0x10 ~ 0x17 | | 读取ADC原始数据 |
| 0x20 ~ 0x27 | | 读取输入电压,单位是mv |
| 0x30 ~ 0x37 | | 读取输入电压与输出电压的比,输入电压/输出电压(0~100) |
| 0x40 ~ 0x47 | | 读取或者是设置A0-A7的数字值 |
| 0x51 ~ 0x52 | | 设置A1-A2的PWM占空比 |
| 0x61 ~ 0x62 | | 设置A1-A2的PWM的频率 |
树莓派I2C库安装
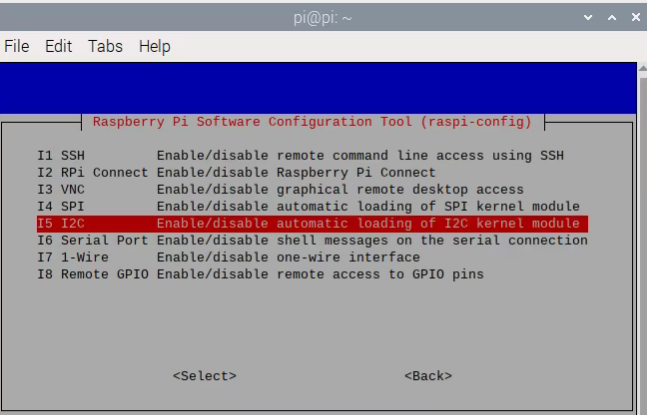
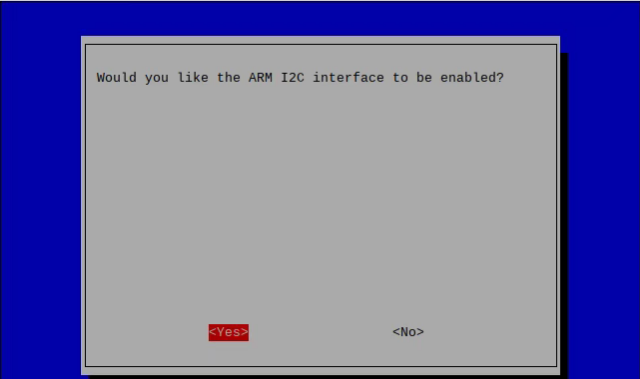
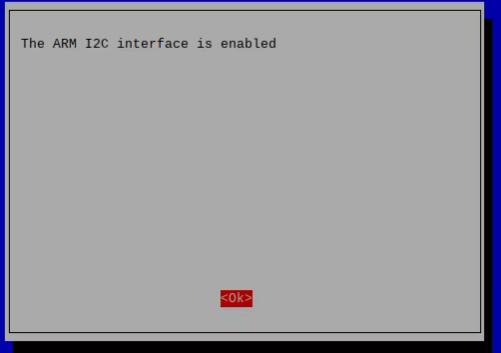
打开树莓派终端输入"sudo raspi-config"命令,然后按照下图顺序依次操作即可。
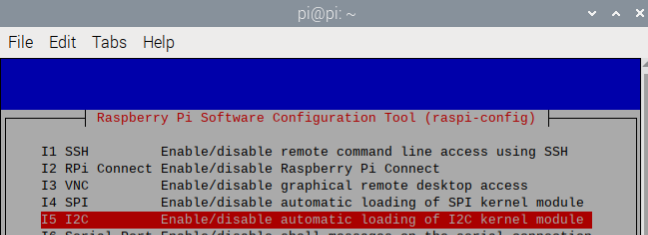
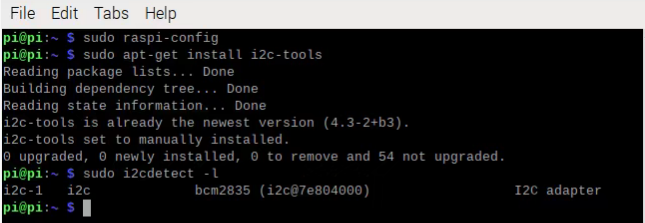
以上就是开启树莓派I2C,接下来我们安装树莓I2C库在终端输入"sudo apt-get install i2c-tools",输入完成后就可以看到正在下载I2C库,安装完成之后可以在终端输入"sudo i2cdetect -l"检测是否安装正确,若出现类似于下面的信息就说明安装正常。
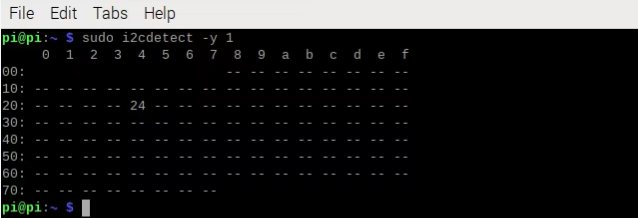
在终端输入"sudo i2cdetect -y 1"命令即可扫描接在I2C总线上的所有I2C设备,并打印出该设备的I2C总线地址,且我们的扩展板的I2C地址为0x24。
bash
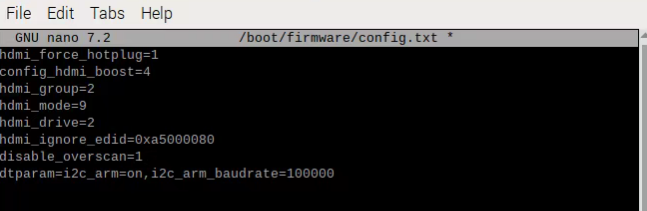
sudo nano /boot/config.txt查找包含"dtparam=i2c_arm=on"的行,添加",i2c_arm_baudrate=100000",其中100000是新设置的速度(100kbit /s),注意i2c前面的逗号。完整代码如下:
bash
dtparam=i2c_arm=on,i2c_arm_baudrate=100000这样可以启用I2C总线的同时,也完成了新波特率的设置。编辑完成后,使用CTRL-X,然后选择Y,再按下回车键,保存文件并退出。
重新启动树莓派,使新的设置生效:
bash
sudo reboot例程
运行python demo前,一定要用如下命名安装smbus2
bash
pi@raspberrypi: pip3 install smbus2 1. 读取ADC模拟值
众所周知,Raspberry Pi中没有ADC,因此不能直接通过树莓派的引脚读取模拟值。本扩展板内置一颗I2C协议 10bit精度的ADC MCU,树莓派可以通过这个ADC MCU获取模拟值,扩展板上一共有8个可用的模拟输入接口,对应板子丝印A0A7,ADC读取值范围为01023。
python
#coding=utf-8
from sensor_expansion_board_i2c import IoExpansionBoardI2c
from smbus2 import SMBus
import time
# 初始化I2C总线
i2c_bus = 1 # 树莓派上的I2C总线号,通常是1
i2c_address = 0x24 # I2C设备地址
# 创建IoExpansionBoardI2c对象
io_expansion_board_i2c = IoExpansionBoardI2c(i2c_bus, i2c_address)
# 设置所有引脚为ADC模式
for i in range(8):
io_expansion_board_i2c[i].mode = IoExpansionBoardI2c.ADC_MODE
# 循环读取ADC值
try:
while True:
print('A0:',io_expansion_board_i2c[0].adc_value)
print('A1:',io_expansion_board_i2c[1].adc_value)
print('A2:',io_expansion_board_i2c[2].adc_value)
print('A3:',io_expansion_board_i2c[3].adc_value)
print('A4:',io_expansion_board_i2c[4].adc_value)
print('A5:',io_expansion_board_i2c[5].adc_value)
print('A6:',io_expansion_board_i2c[6].adc_value)
print('A7:',io_expansion_board_i2c[7].adc_value)
time.sleep(1) # 延时1秒
except KeyboardInterrupt:
# print("程序已停止")
pass用python3运行demo
bash
pi@raspberrypi:~/$ python3 adc.py 2. 数字GPIO测试
树莓派扩展板上丝印A0~A7引脚的每个单独引脚都可以独立设置成输入或者输出功能,输入可以设置 上拉、下拉或者浮空输入 。
python
#coding=utf-8
from sensor_expansion_board_i2c import IoExpansionBoardI2c
from smbus2 import SMBus
import time
# 初始化I2C总线
i2c_bus = 1 # 树莓派上的I2C总线号,通常是1
i2c_address = 0x24 # I2C设备地址
# 创建IoExpansionBoardI2c对象
io_expansion_board_i2c = IoExpansionBoardI2c(i2c_bus, i2c_address)
# Set pin mode
io_expansion_board_i2c[0].mode = IoExpansionBoardI2c.OUTPUT_DIGITAL_MODE # Pin 0 set as digital output mode
io_expansion_board_i2c[1].mode = IoExpansionBoardI2c.INPUT_PULL_UP_MODE # Pin 1 set as input pull up mode
try:
while True:
digital_value = io_expansion_board_i2c[1].value # reads pin 1 value
print('digital value:', digital_value)
io_expansion_board_i2c[0].value = digital_value # write pin 1 value into pin 0
except KeyboardInterrupt:
print("The programme has been stopped")3. PWM输出
树莓派原本的硬件pwm只有GPIO1、GPIO26、GIPIO23、GPIO24对应的WiringPi就是1,26,23,24但是不同库支持的输出不一样,使用和树莓派本身的硬件资源冲突,比如声卡,定时器等。所以本扩展板外扩2路pwm可以很好解决这个问题。但是只有A1和A2两个引脚支持
python
#coding=utf-8
from sensor_expansion_board_i2c import IoExpansionBoardI2c
import time
# 初始化I2C总线
i2c_bus = 1 # 树莓派上的I2C总线号,通常是1
i2c_address = 0x24 # I2C设备地址
# 创建IoExpansionBoardI2c对象
io_expansion_board_i2c = IoExpansionBoardI2c(i2c_bus, i2c_address)
io_expansion_board_i2c.pwm_frequency = 1000 # Setting PWM frequency
# Setting pin mode as PWM output mode
io_expansion_board_i2c[1].mode = IoExpansionBoardI2c.OUTPUT_PWM_MODE
io_expansion_board_i2c[2].mode = IoExpansionBoardI2c.OUTPUT_PWM_MODE
print('only A1 A2 support pwm output')
try:
while True:
io_expansion_board_i2c[1].pwm_duty = 100 # Setting the PWM duty ratio of pin 1 as 100
io_expansion_board_i2c[2].pwm_duty = 1023 # Setting the PWM duty ratio of pin 2 as 1023
print('A1 pwm_duty:', io_expansion_board_i2c[1].pwm_duty, 'A2 pwm_duty:', io_expansion_board_i2c[2].pwm_duty)
time.sleep(1)
io_expansion_board_i2c[1].pwm_duty = 2048 # Setting the PWM duty ratio of pin 1 as 2048
io_expansion_board_i2c[2].pwm_duty = 4096 # Setting the PWM duty ratio of pin 2 as 1023
print('A1 pwm_duty:', io_expansion_board_i2c[1].pwm_duty, 'A2 pwm_duty:', io_expansion_board_i2c[2].pwm_duty)
time.sleep(1)
except KeyboardInterrupt:
print("The programme has been stopped")4. 舵机控制
有了PWM的支持,那么意味着也可以将此pwm扩展成驱动舵机的接口,如下代码就是驱动SG90舵机测试代码。其他非标准协议的脉冲宽度舵机,可以自行修改驱动实现。
python
#coding=utf-8
from sensor_expansion_board_i2c import IoExpansionBoardI2c
import time
# 初始化I2C总线
i2c_bus = 1 # 树莓派上的I2C总线号,通常是1
i2c_address = 0x24 # I2C设备地址
# 创建IoExpansionBoardI2c对象
io_expansion_board_i2c = IoExpansionBoardI2c(i2c_bus, i2c_address)
io_expansion_board_i2c.pwm_frequency = 50 # Setting PWM frequency as 50Hz
# Setting pin mode as PWM output mode
io_expansion_board_i2c[1].mode = IoExpansionBoardI2c.OUTPUT_PWM_MODE
io_expansion_board_i2c[2].mode = IoExpansionBoardI2c.OUTPUT_PWM_MODE
try:
while True:
io_expansion_board_i2c[1].servo_angle = 0
io_expansion_board_i2c[2].servo_angle = 90
print('angle:', io_expansion_board_i2c[1].servo_angle, ",",
io_expansion_board_i2c[2].servo_angle)
time.sleep(1)
io_expansion_board_i2c[1].servo_angle = 90
io_expansion_board_i2c[2].servo_angle = 0
print('angle:', io_expansion_board_i2c[1].servo_angle, ",",
io_expansion_board_i2c[2].servo_angle)
time.sleep(1)
io_expansion_board_i2c[1].servo_angle = 180
io_expansion_board_i2c[2].servo_angle = 180
print('angle:', io_expansion_board_i2c[1].servo_angle, ",",
io_expansion_board_i2c[2].servo_angle)
time.sleep(1)
io_expansion_board_i2c[1].servo_angle = 90
io_expansion_board_i2c[2].servo_angle = 90
print('angle:', io_expansion_board_i2c[1].servo_angle, ",",
io_expansion_board_i2c[2].servo_angle)
time.sleep(1)
except KeyboardInterrupt:
print("The programme has been stopped")**下载树莓派C++示例程序:**本例程为树莓派使用c++语言编写,引脚A0输出高低电平,间隔100ms
cpp
#include <iostream>
#include <chrono>
#include <thread>
#include "gpio_expansion_board.h"
// 创建 GpioExpansionBoard 实例
GpioExpansionBoard gpio_expansion_board;
int main() {
std::cout << "Setup" << std::endl;
// 配置A0为输出模式
if (!gpio_expansion_board.SetGpioMode(GpioExpansionBoard::kGpioPinE0,
GpioExpansionBoard::kOutput)) {
std::cerr << "Failed to set GPIO mode" << std::endl;
return -1;
}
// 主循环
while (true) {
// 设置A0的输出高电平
std::cout << "Setting GPIO A0 to HIGH" << std::endl;
if (!gpio_expansion_board.SetGpioLevel(GpioExpansionBoard::kGpioPinE0, 1)) {
std::cerr << "Failed to set GPIO level HIGH" << std::endl;
return -1;
}
// 延时100毫秒
std::this_thread::sleep_for(std::chrono::milliseconds(100));
// 设置A0的输出低电平
std::cout << "Setting GPIO A0 to LOW" << std::endl;
if (!gpio_expansion_board.SetGpioLevel(GpioExpansionBoard::kGpioPinE0, 0)) {
std::cerr << "Failed to set GPIO level LOW" << std::endl;
return -1;
}
// 延时100毫秒
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
// 程序结束前将GPIO设置为低电平
gpio_expansion_board.SetGpioLevel(GpioExpansionBoard::kGpioPinE0, 0);
std::cout << "Program terminated" << std::endl;
return 0;
}树莓派环境下的直接使用g++命令行编译
bash
pi@raspberrypi:~/sensor_expansion_board_python_demo/src
g++ -lwiringPi -I./ digital_output/digital_output.cpp gpio_expansion_board.cpp -o gpio_out
pi@raspberrypi:~/sensor_expansion_board_python_demo/src
./gpio_out
Setup
Setting GPIO A0 to HIGH
Setting GPIO A0 to LOW
Setting GPIO A0 to HIGH
Setting GPIO A0 to LOW其他demo程序编译方法类似,不再冗述。
|----|---------------|------------------------|
| 序号 | 文件名字 | 功能描述 |
| 1 | adc | 模拟输入,A0~A7支持 |
| 2 | digital_input | 数字输入,A0~A7支持 |
| 3 | digital_out | 数字输出,A0~A7支持 |
| 4 | pwm | 可输出pwm波,只有A1-A2两个引脚支持 |
| 5 | servo | 控制sg90舵机,只有A1-A2两个引脚支持 |