C++内存分布详解:从零开始理解程序内存布局
一、C++内存布局概述
想象一下,C++程序就像一座房子,内存就是房子的各个房间。程序运行时,不同的数据会被分配到不同的"房间"中。理解这些"房间"的分布和用途,对编写高效、安全的C++程序至关重要。
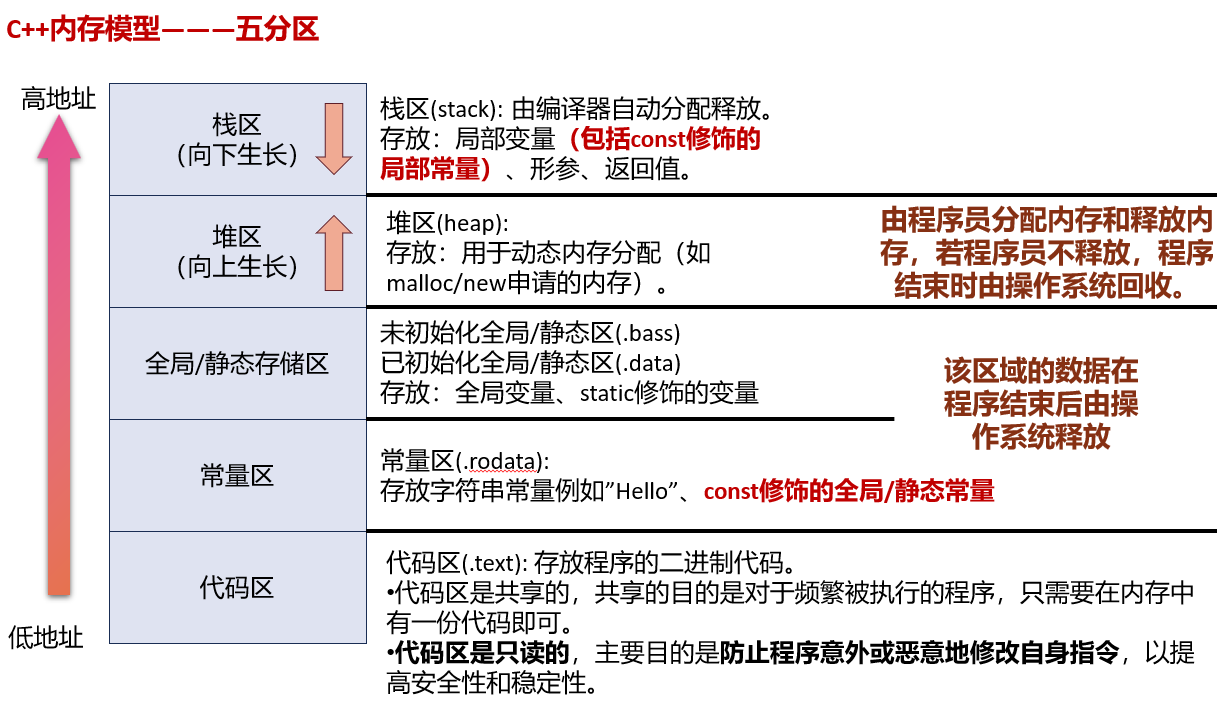
关键点 :堆和栈像两股力量,堆向上长,栈向下长,如果中间挤满了,就会触发"堆栈冲突",导致分配失败。
🔬 分区一:代码区 (Text Segment / .text)
详细特性
- 内容:编译后的机器指令(二进制代码)
- 权限:只读 (Read-Only)
- 共享性:多个相同进程可共享同一份物理内存中的代码
- 生命周期:程序启动时加载,整个运行期间存在
- 位置:虚拟地址空间的最低区域之一
代码验证
cpp
#include <iostream>
// 函数代码存储在代码区
void print_message() {
std::cout << "This function's code is in text segment" << std::endl;
}
// 另一个函数,用于对比地址
void another_function() {
std::cout << "Another function" << std::endl;
}
int main() {
// 获取函数指针 - 指向代码区的地址
void (*func_ptr1)() = print_message;
void (*func_ptr2)() = another_function;
std::cout << "=== 代码区验证 ===" << std::endl;
std::cout << "print_message() 函数地址: "
<< reinterpret_cast<void*>(print_message) << std::endl;
std::cout << "another_function() 函数地址: "
<< reinterpret_cast<void*>(another_function) << std::endl;
std::cout << "main() 函数地址: "
<< reinterpret_cast<void*>(main) << std::endl;
// 函数地址通常非常小(低地址),例如 0x4005d0
// 尝试写入代码区会导致段错误(崩溃)
// char* code_ptr = reinterpret_cast<char*>(print_message);
// code_ptr[0] = 0x90; // ❌ 尝试修改代码段,运行时崩溃
// 执行函数(通过指针调用)
func_ptr1();
func_ptr2();
return 0;
}重要说明
- 代码区是操作系统设置为只读的,任何修改尝试都会触发硬件异常
- 函数指针的值就是该函数在代码区的入口地址
- 现代CPU有代码缓存(L1i Cache)专门缓存代码区内容
🔒 分区二:常量区 (Read-Only Data / .rodata)
详细特性
- 内容 :
- 字符串字面值:
"Hello, World!" const修饰的全局变量和静态变量- 编译时常量表达式
- 字符串字面值:
- 权限:只读
- 关键点 :区分
const局部变量(在栈区)和const全局变量(在常量区)
代码验证
cpp
#include <iostream>
#include <cstring>
// 常量区的典型内容:
// 1. 字符串字面值(总是放在.rodata)
const char* global_str_literal = "Global String Literal";
// 2. const全局变量(在.rodata)
const int global_const_int = 100;
const double global_const_double = 3.14159;
// 3. const静态变量(在.rodata)
static const char* static_const_str = "Static Const String";
// 对比:非常量全局变量(在.data段,不在.rodata)
int global_non_const = 200;
void demonstrate_rodata() {
std::cout << "\n=== 常量区(.rodata)验证 ===" << std::endl;
// 打印各种常量的地址
std::cout << "1. 字符串字面值地址:" << std::endl;
std::cout << " \"Hello\": " << reinterpret_cast<const void*>("Hello") << std::endl;
std::cout << " \"World\": " << reinterpret_cast<const void*>("World") << std::endl;
// 相同字符串字面值可能共享同一地址(编译器优化)
const char* str1 = "Duplicate";
const char* str2 = "Duplicate";
std::cout << "\n2. 相同字符串字面值优化:" << std::endl;
std::cout << " str1地址: " << reinterpret_cast<const void*>(str1) << std::endl;
std::cout << " str2地址: " << reinterpret_cast<const void*>(str2) << std::endl;
std::cout << " 是否相等: " << (str1 == str2 ? "是" : "否") << std::endl;
std::cout << "\n3. const全局变量地址:" << std::endl;
std::cout << " global_const_int: " << &global_const_int << std::endl;
std::cout << " global_const_double: " << &global_const_double << std::endl;
std::cout << "\n4. 与非常量全局变量对比:" << std::endl;
std::cout << " const全局变量(rodata): " << &global_const_int << std::endl;
std::cout << " 非常量全局变量(.data): " << &global_non_const << std::endl;
// 重要:const局部变量在栈区,不在.rodata!
const int local_const = 300;
std::cout << "\n5. const局部变量(在栈区,不在.rodata):" << std::endl;
std::cout << " local_const地址: " << &local_const << std::endl;
// 尝试修改.rodata内容会导致段错误(取消注释会崩溃)
// char* mutable_ptr = const_cast<char*>("Try to modify");
// mutable_ptr[0] = 'X'; // ❌ 运行时崩溃:段错误
// 验证字符串常量不可修改
const char* rodata_str = "I'm in .rodata";
std::cout << "\n6. 字符串常量内容: " << rodata_str << std::endl;
// 正确的方式:如果需要可修改的字符串,应该在栈或堆上创建副本
char stack_copy[] = "Stack Copy"; // 在栈上创建可修改副本
stack_copy[0] = 's'; // ✅ 允许修改
std::cout << " 栈上副本可修改: " << stack_copy << std::endl;
}
int main() {
demonstrate_rodata();
return 0;
}📊 分区三:全局/静态存储区
详细细分
| 子区域 | 内容 | 初始化时机 | 磁盘占用 |
|---|---|---|---|
| .data段 | 已初始化全局/静态变量 | 编译时确定初始值 | 占用可执行文件空间 |
| .bss段 | 未初始化或零初始化全局/静态变量 | 程序加载时清零 | 不占磁盘空间,只记录大小 |
代码验证
cpp
#include <iostream>
#include <cstring>
// ============= 全局变量(在全局/静态存储区)=============
// .data段:已初始化的全局变量
int global_initialized = 100; // 在.data段
const char* global_string = "Initialized"; // 指针在.data,字符串在.rodata
// .bss段:未初始化的全局变量(或零初始化)
int global_uninitialized; // 在.bss段,默认为0
int global_zero_initialized = 0; // 也在.bss段
double global_double_uninit; // 在.bss段
char global_array[1000]; // 大数组在.bss段
// 静态全局变量(作用域限制,但存储位置相同)
static int static_global = 200; // 在.data段
void demonstrate_global_static() {
std::cout << "\n=== 全局/静态存储区验证 ===" << std::endl;
std::cout << "\n1. 全局变量地址:" << std::endl;
std::cout << " global_initialized(.data): " << &global_initialized << std::endl;
std::cout << " global_uninitialized(.bss): " << &global_uninitialized << std::endl;
std::cout << " global_zero_initialized(.bss): " << &global_zero_initialized << std::endl;
std::cout << " global_double_uninit(.bss): " << &global_double_uninit << std::endl;
std::cout << " static_global(.data): " << &static_global << std::endl;
// 验证.bss段变量被初始化为0
std::cout << "\n2. .bss段变量默认值:" << std::endl;
std::cout << " global_uninitialized = " << global_uninitialized << std::endl;
std::cout << " global_zero_initialized = " << global_zero_initialized << std::endl;
std::cout << " global_double_uninit = " << global_double_uninit << std::endl;
// 验证.data段保持初始值
std::cout << " global_initialized = " << global_initialized << std::endl;
// ============= 静态局部变量 =============
std::cout << "\n3. 静态局部变量特性:" << std::endl;
for (int i = 0; i < 3; i++) {
// 静态局部变量:存储在.data/.bss,但作用域是局部的
static int static_local_counter = 0; // 只初始化一次!
int regular_local_counter = 0; // 每次循环重新初始化
static_local_counter++;
regular_local_counter++;
std::cout << " 第" << i+1 << "次调用:" << std::endl;
std::cout << " static_local_counter = " << static_local_counter
<< " (地址: " << &static_local_counter << ")" << std::endl;
std::cout << " regular_local_counter = " << regular_local_counter
<< " (地址: " << ®ular_local_counter << ")" << std::endl;
}
// ============= 全局数组 =============
std::cout << "\n4. 全局数组的内存连续性:" << std::endl;
// 全局数组在.bss段
static char static_array[10];
char global_array_small[5];
std::cout << " static_array地址: " << static_cast<void*>(static_array) << std::endl;
std::cout << " global_array_small地址: " << static_cast<void*>(global_array_small) << std::endl;
// 填充一些数据
strcpy(static_array, "Hello");
std::cout << " static_array内容: " << static_array << std::endl;
// ============= 验证存储位置 =============
std::cout << "\n5. 地址范围分析:" << std::endl;
// 获取各种变量的地址值
long addr_text = reinterpret_cast<long>(demonstrate_global_static);
long addr_rodata = reinterpret_cast<long>("StringLiteral");
long addr_data = reinterpret_cast<long>(&global_initialized);
long addr_bss = reinterpret_cast<long>(&global_uninitialized);
std::cout << " 代码区(.text)地址: 0x" << std::hex << addr_text << std::dec << std::endl;
std::cout << " 常量区(.rodata)地址: 0x" << std::hex << addr_rodata << std::dec << std::endl;
std::cout << " .data段地址: 0x" << std::hex << addr_data << std::dec << std::endl;
std::cout << " .bss段地址: 0x" << std::hex << addr_bss << std::dec << std::endl;
// 通常:.text < .rodata < .data < .bss < heap < stack
}
// 静态函数(链接性内部,但代码仍在.text段)
static void static_function() {
// 静态函数与普通函数代码存储位置相同
}
int main() {
demonstrate_global_static();
// 验证全局变量值保持
std::cout << "\n6. 全局变量值在函数调用间保持:" << std::endl;
global_initialized += 50;
std::cout << " 修改后 global_initialized = " << global_initialized << std::endl;
return 0;
}🧱 分区四:堆区 (Heap / Free Store)
详细特性
- 管理方式 :程序员手动管理(
new/delete,malloc/free) - 生长方向:向高地址生长
- 分配速度:相对较慢(需要系统调用/内存管理算法)
- 空间大小:仅受虚拟内存限制,通常很大
- 碎片问题:频繁分配释放可能产生内存碎片
代码验证
cpp
#include <iostream>
#include <cstdlib>
#include <memory>
void demonstrate_heap() {
std::cout << "\n=== 堆区(Heap)验证 ===" << std::endl;
// ============= 基本堆分配 =============
std::cout << "\n1. 基本堆分配操作:" << std::endl;
// 使用 new 分配单个对象
int* heap_int = new int(42);
std::cout << " heap_int地址: " << heap_int
<< ", 值: " << *heap_int << std::endl;
// 使用 new[] 分配数组
int* heap_array = new int[5];
for (int i = 0; i < 5; i++) {
heap_array[i] = i * 10;
}
std::cout << " heap_array地址: " << heap_array
<< ", 第二个元素: " << heap_array[1] << std::endl;
// 使用 malloc (C风格)
double* malloc_ptr = static_cast<double*>(malloc(sizeof(double) * 3));
malloc_ptr[0] = 1.1;
malloc_ptr[1] = 2.2;
malloc_ptr[2] = 3.3;
std::cout << " malloc_ptr地址: " << malloc_ptr
<< ", 第三个元素: " << malloc_ptr[2] << std::endl;
// ============= 堆的生长方向 =============
std::cout << "\n2. 堆的生长方向(向高地址):" << std::endl;
// 连续分配多个堆块,观察地址变化
int* block1 = new int(100);
int* block2 = new int(200);
int* block3 = new int(300);
std::cout << " block1地址: " << block1 << std::endl;
std::cout << " block2地址: " << block2 << std::endl;
std::cout << " block3地址: " << block3 << std::endl;
// 通常 block1 < block2 < block3(向高地址生长)
if (block1 < block2 && block2 < block3) {
std::cout << " ✓ 验证: 堆向高地址生长" << std::endl;
}
// ============= 内存泄漏演示 =============
std::cout << "\n3. 内存泄漏演示(不要在生产环境这样做):" << std::endl;
// 故意不释放的内存 - 内存泄漏!
int* leaked_memory = new int[100];
std::cout << " 分配了100个int,但故意不释放" << std::endl;
std::cout << " 地址: " << leaked_memory << std::endl;
// 注意:这里没有 delete[] leaked_memory;
// ============= 正确释放内存 =============
std::cout << "\n4. 正确释放内存:" << std::endl;
delete heap_int; // 释放单个对象
delete[] heap_array; // 释放数组
free(malloc_ptr); // 释放malloc分配的内存
delete block1;
delete block2;
delete block3;
std::cout << " ✓ 已正确释放所有内存" << std::endl;
// ============= 使用智能指针(现代C++推荐) =============
std::cout << "\n5. 使用智能指针自动管理:" << std::endl;
{ // 作用域开始
std::unique_ptr<int> smart_ptr(new int(999));
std::cout << " unique_ptr管理的值: " << *smart_ptr << std::endl;
std::cout << " 地址: " << smart_ptr.get() << std::endl;
// 不需要手动delete,离开作用域自动释放
} // 作用域结束,自动释放内存
std::cout << " ✓ 智能指针已自动释放内存" << std::endl;
// ============= 堆大小限制测试 =============
std::cout << "\n6. 大内存分配测试:" << std::endl;
try {
// 尝试分配较大内存(100MB)
size_t large_size = 100 * 1024 * 1024; // 100MB
char* large_block = new char[large_size];
std::cout << " 成功分配100MB内存" << std::endl;
std::cout << " 地址范围: " << static_cast<void*>(large_block)
<< " - " << static_cast<void*>(large_block + large_size - 1) << std::endl;
// 使用部分内存
large_block[0] = 'A';
large_block[large_size - 1] = 'Z';
delete[] large_block;
std::cout << " ✓ 已释放大内存块" << std::endl;
} catch (std::bad_alloc& e) {
std::cout << " 内存分配失败: " << e.what() << std::endl;
}
// ============= 访问已释放内存(危险!) =============
std::cout << "\n7. 悬垂指针演示(未定义行为):" << std::endl;
int* dangling_ptr = new int(123);
std::cout << " 分配内存,值: " << *dangling_ptr << std::endl;
delete dangling_ptr; // 释放内存
// 此时 dangling_ptr 成为悬垂指针
std::cout << " 警告:以下行为未定义!" << std::endl;
// std::cout << " 访问已释放内存: " << *dangling_ptr << std::endl; // 危险!
// 正确做法:释放后立即置空
dangling_ptr = nullptr;
std::cout << " ✓ 释放后指针已置空" << std::endl;
}
int main() {
demonstrate_heap();
return 0;
}📚 分区五:栈区 (Stack)
详细特性
- 管理方式:编译器自动管理
- 生长方向:向低地址生长(与堆相反)
- 分配速度:极快(只需移动栈指针)
- 空间大小:有限(通常1-8MB,可配置)
- 数据结构:后进先出(LIFO)
- 内容:函数参数、局部变量、返回地址、保存的寄存器
代码验证
cpp
#include <iostream>
#include <cstring>
// 递归函数,用于演示栈溢出
void recursive_function(int depth) {
// 在栈上分配一个大数组,加速栈溢出
char local_buffer[1024]; // 每个递归调用分配1KB栈空间
local_buffer[0] = 'A'; // 使用一下,防止优化
std::cout << "递归深度: " << depth;
std::cout << ", 栈地址: " << static_cast<void*>(local_buffer) << std::endl;
if (depth < 5) { // 控制递归深度,防止真的溢出
recursive_function(depth + 1);
}
}
void demonstrate_stack() {
std::cout << "\n=== 栈区(Stack)验证 ===" << std::endl;
// ============= 栈的生长方向 =============
std::cout << "\n1. 栈的生长方向(向低地址):" << std::endl;
int var1 = 100;
int var2 = 200;
int var3 = 300;
std::cout << " var1地址: " << &var1 << ", 值: " << var1 << std::endl;
std::cout << " var2地址: " << &var2 << ", 值: " << var2 << std::endl;
std::cout << " var3地址: " << &var3 << ", 值: " << var3 << std::endl;
// 栈向低地址生长,所以 &var1 > &var2 > &var3
if (&var1 > &var2 && &var2 > &var3) {
std::cout << " ✓ 验证: 栈向低地址生长" << std::endl;
}
// ============= 函数调用栈 =============
std::cout << "\n2. 函数调用时的栈变化:" << std::endl;
recursive_function(1);
// ============= 栈帧结构演示 =============
std::cout << "\n3. 栈帧结构演示:" << std::endl;
void show_stack_frame(int param1, int param2) {
// 局部变量
int local1 = 10;
int local2 = 20;
std::cout << " 当前函数栈帧内容:" << std::endl;
std::cout << " 参数param1地址: " << ¶m1 << ", 值: " << param1 << std::endl;
std::cout << " 参数param2地址: " << ¶m2 << ", 值: " << param2 << std::endl;
std::cout << " 局部变量local1地址: " << &local1 << ", 值: " << local1 << std::endl;
std::cout << " 局部变量local2地址: " << &local2 << ", 值: " << local2 << std::endl;
// 嵌套调用,创建新的栈帧
if (param1 > 0) {
std::cout << "\n 嵌套调用新栈帧:" << std::endl;
show_stack_frame(0, 0);
}
}
show_stack_frame(100, 200);
// ============= 返回局部变量地址的错误 =============
std::cout << "\n4. 返回局部变量地址的危险性:" << std::endl;
auto dangerous_function = []() -> int* {
int local_var = 777; // 局部变量,在栈上
std::cout << " 函数内 local_var地址: " << &local_var << std::endl;
return &local_var; // ❌ 返回局部变量地址
};
int* dangling_pointer = dangerous_function();
std::cout << " 返回的指针值: " << dangling_pointer << std::endl;
std::cout << " 警告:以下访问是未定义行为!" << std::endl;
// std::cout << " 尝试访问: " << *dangling_pointer << std::endl; // 危险!
// ============= 栈溢出演示 =============
std::cout << "\n5. 栈溢出风险:" << std::endl;
auto cause_stack_overflow = [](int count) {
// 在栈上分配大数组
char huge_buffer[1024 * 1024]; // 1MB的栈数组
std::cout << " 分配了1MB栈内存,深度: " << count << std::endl;
if (count < 3) { // 控制深度,防止真的崩溃
cause_stack_overflow(count + 1);
}
};
// 小心:取消注释可能导致栈溢出崩溃
// cause_stack_overflow(1);
std::cout << " (栈溢出演示已禁用,取消注释可能导致崩溃)" << std::endl;
// ============= 栈与堆的对比 =============
std::cout << "\n6. 栈与堆的对比:" << std::endl;
// 栈上分配
int stack_array[100]; // 在栈上分配400字节
stack_array[0] = 1;
std::cout << " 栈数组地址: " << stack_array << std::endl;
// 堆上分配
int* heap_array = new int[100]; // 在堆上分配400字节
heap_array[0] = 2;
std::cout << " 堆数组地址: " << heap_array << std::endl;
// 对比地址
if (stack_array > heap_array) {
std::cout << " ✓ 验证: 栈地址 > 堆地址(栈在高地址方向)" << std::endl;
}
delete[] heap_array;
// ============= 自动变量生命周期 =============
std::cout << "\n7. 栈变量的自动生命周期:" << std::endl;
{ // 开始一个作用域
int scope_var = 555;
std::cout << " 作用域内变量值: " << scope_var << std::endl;
std::cout << " 地址: " << &scope_var << std::endl;
} // 作用域结束,scope_var自动销毁
// std::cout << "作用域外访问: " << scope_var << std::endl; // 编译错误
std::cout << " ✓ 栈变量在作用域结束时自动销毁" << std::endl;
}
int main() {
demonstrate_stack();
// 显示主函数的栈信息
std::cout << "\n8. 主函数栈信息:" << std::endl;
int main_local = 999;
std::cout << " main函数局部变量地址: " << &main_local << std::endl;
std::cout << " main函数地址: " << reinterpret_cast<void*>(main) << std::endl;
return 0;
}🧪 综合验证:完整内存布局演示
cpp
#include <iostream>
#include <vector>
// 全局变量 - 在全局/静态存储区
int global_var = 100;
const int global_const = 200;
void comprehensive_demo() {
std::cout << "\n=== 内存五区综合验证 ===\n" << std::endl;
// 获取各种地址
void (*func_ptr)() = comprehensive_demo;
const char* rodata_str = "RODATA String";
int stack_var = 300;
int* heap_var = new int(400);
static int static_var = 500;
std::cout << "1. 各分区典型变量地址对比:\n" << std::endl;
std::cout << " 代码区(.text) - 函数地址: " << reinterpret_cast<void*>(func_ptr) << std::endl;
std::cout << " 常量区(.rodata) - 字符串: " << reinterpret_cast<const void*>(rodata_str) << std::endl;
std::cout << " 常量区(.rodata) - 全局const: " << &global_const << std::endl;
std::cout << " .data段 - 已初始化全局变量: " << &global_var << std::endl;
std::cout << " .data段 - 静态变量: " << &static_var << std::endl;
std::cout << " 堆区(heap) - 动态分配: " << heap_var << std::endl;
std::cout << " 栈区(stack) - 局部变量: " << &stack_var << "\n" << std::endl;
// 地址排序验证
std::vector<std::pair<std::string, long>> addresses = {
{"代码区", reinterpret_cast<long>(func_ptr)},
{"常量区", reinterpret_cast<long>(rodata_str)},
{".data段", reinterpret_cast<long>(&global_var)},
{"堆区", reinterpret_cast<long>(heap_var)},
{"栈区", reinterpret_cast<long>(&stack_var)}
};
// 按地址排序
std::sort(addresses.begin(), addresses.end(),
[](const auto& a, const auto& b) { return a.second < b.second; });
std::cout << "2. 内存地址从低到高排序:\n" << std::endl;
for (const auto& [name, addr] : addresses) {
std::cout << " " << name << ": 0x" << std::hex << addr << std::dec << std::endl;
}
std::cout << "\n3. 预期内存布局:\n" << std::endl;
std::cout << " 低地址 -> 高地址" << std::endl;
std::cout << " ┌─────────────────┐" << std::endl;
std::cout << " │ 代码区(.text) │" << std::endl;
std::cout << " ├─────────────────┤" << std::endl;
std::cout << " │ 常量区(.rodata)│" << std::endl;
std::cout << " ├─────────────────┤" << std::endl;
std::cout << " │ .data/.bss段 │" << std::endl;
std::cout << " ├─────────────────┤" << std::endl;
std::cout << " │ 堆区(↑) │" << std::endl;
std::cout << " ├─────────────────┤" << std::endl;
std::cout << " │ 栈区(↓) │" << std::endl;
std::cout << " └─────────────────┘" << std::endl;
delete heap_var;
}
int main() {
comprehensive_demo();
std::cout << "\n=== 关键点总结 ===" << std::endl;
std::cout << "1. 代码区(.text): 只读,存储机器指令" << std::endl;
std::cout << "2. 常量区(.rodata): 只读,存储字符串和const全局变量" << std::endl;
std::cout << "3. 全局/静态区(.data/.bss): 读写,存储全局和static变量" << std::endl;
std::cout << "4. 堆区(heap): 手动管理,向高地址生长" << std::endl;
std::cout << "5. 栈区(stack): 自动管理,向低地址生长" << std::endl;
std::cout << "\n内存管理原则:" << std::endl;
std::cout << "• 栈: 用于短期、小数据、自动管理" << std::endl;
std::cout << "• 堆: 用于长期、大数据、手动管理" << std::endl;
std::cout << "• 全局区: 用于程序生命周期全程的数据" << std::endl;
return 0;
}📝 关键知识点总结表
| 内存区域 | 存储内容 | 生命周期 | 管理方式 | 权限 | 地址方向 | 典型大小 |
|---|---|---|---|---|---|---|
| 代码区 | 机器指令 | 程序全程 | OS管理 | 只读 | 最低 | 程序大小 |
| 常量区 | 字符串、const全局 | 程序全程 | OS管理 | 只读 | 较低 | 常量总量 |
| .data段 | 已初始化全局/静态 | 程序全程 | 编译器 | 读写 | 中等 | 数据大小 |
| .bss段 | 未初始化全局/静态 | 程序全程 | 编译器 | 读写 | 中等 | 数据大小 |
| 堆区 | 动态分配内存 | 手动控制 | 程序员 | 读写 | 向上生长 | GB级别 |
| 栈区 | 局部变量、参数 | 函数作用域 | 编译器 | 读写 | 向下生长 | 1-8MB |
⚠️ 常见错误与最佳实践
- 栈溢出:避免在栈上分配大数组或深度递归
- 内存泄漏 :
new/malloc必须配对delete/free - 悬垂指针:释放内存后立即置空指针
- 返回局部变量地址:绝对不要这样做
- 修改字符串常量:会导致段错误
- 使用未初始化指针:访问随机内存地址
通过理解这个内存模型,你可以:
- 预测变量的生命周期
- 优化内存使用性能
- 避免常见的内存错误
- 更好地调试内存相关问题
每个程序运行时都遵循这个内存布局,理解它对于成为高级C++开发者至关重要。
C++内存管理深度解析:工作原理、类型差异与操作符本质
一、内存管理方式的工作原理深度剖析
1.1 静态内存管理(编译时分配)
工作原理 :
静态内存分配发生在编译时期,由编译器确定每个变量的大小和位置,生成包含这些信息的可执行文件。当程序加载到内存时,操作系统根据这些信息直接预留内存空间。
cpp
// 编译时确定内存布局
int global_var; // 在.data或.bss段预留4字节
static int static_var; // 同上
const int const_global = 5; // 在.rodata段预留4字节
void func() {
static int static_local = 10; // 首次调用时初始化,生命周期持续到程序结束
}关键机制:
- 符号表:编译器创建符号表,记录每个全局/静态变量的名称、类型、大小和相对地址
- 重定位:链接器将多个目标文件的符号表合并,计算最终的内存地址
- 加载时映射:操作系统加载器将程序映射到虚拟地址空间,为.data/.bss分配物理页
1.2 栈内存管理(自动分配)
工作原理 :
栈管理基于栈指针(SP/ESP/RSP) 和基址指针(BP/EBP/RBP) 的协作。每个函数调用创建一个栈帧,包含参数、返回地址、局部变量和保存的寄存器。
cpp
// 函数调用时的栈帧创建过程
int add(int x, int y) {
int result = x + y; // 局部变量在栈帧内
return result;
}
// 编译后的近似汇编代码:
/*
add:
push ebp ; 保存调用者基址指针
mov ebp, esp ; 设置新基址指针
sub esp, 4 ; 为result分配栈空间
mov eax, [ebp+8] ; 获取参数x
add eax, [ebp+12] ; 加上参数y
mov [ebp-4], eax ; 存入result
mov eax, [ebp-4] ; 设置返回值
mov esp, ebp ; 恢复栈指针
pop ebp ; 恢复调用者基址指针
ret ; 返回
*/栈帧结构:
高地址
┌─────────────────┐
│ 调用者栈帧 │
├─────────────────┤ ← 调用者EBP
│ 保存的EBP │ ← 当前EBP
│ 返回地址 │
│ 参数y │ ← EBP+12
│ 参数x │ ← EBP+8
│ 局部变量result│ ← EBP-4
└─────────────────┘ ← 当前ESP
低地址1.3 堆内存管理(动态分配)
工作原理 :
堆分配器维护一个空闲内存块链表,使用算法(如首次适应、最佳适应)寻找合适块。每次分配在块头部存储元数据(大小、状态),用户获得有效载荷指针。
cpp
// 堆分配器的简化实现
struct BlockHeader {
size_t size; // 块大小(包括头部)
bool is_free; // 是否空闲
BlockHeader* next;// 下一个块(空闲链表)
};
class SimpleAllocator {
BlockHeader* free_list;
void* allocate(size_t size) {
// 对齐大小(如8字节对齐)
size = (size + sizeof(BlockHeader) + 7) & ~7;
// 在空闲链表中寻找合适块
BlockHeader* prev = nullptr;
BlockHeader* curr = free_list;
while (curr) {
if (curr->is_free && curr->size >= size) {
// 找到合适块,可能分割
if (curr->size > size + sizeof(BlockHeader) + 8) {
// 分割块
BlockHeader* new_block =
reinterpret_cast<BlockHeader*>(
reinterpret_cast<char*>(curr) + size);
new_block->size = curr->size - size;
new_block->is_free = true;
new_block->next = curr->next;
curr->size = size;
curr->next = new_block;
}
curr->is_free = false;
// 返回有效载荷(跳过头部)
return reinterpret_cast<void*>(
reinterpret_cast<char*>(curr) + sizeof(BlockHeader));
}
prev = curr;
curr = curr->next;
}
return nullptr; // 分配失败
}
};现代分配器特点:
- glibc的ptmalloc:使用bins管理不同大小块,有多线程优化
- tcmalloc(Google):线程本地缓存减少锁竞争
- jemalloc(Facebook):减少内存碎片,提高并发性能
二、内置类型与自定义类型的核心差异
2.1 内存布局差异
内置类型:直接映射到CPU寄存器大小,内存布局简单
cpp
int x = 10;
double y = 3.14;
/*
内存布局(假设4字节int,8字节double):
[x][x][x][x][y][y][y][y][y][y][y][y]
*/自定义类型:考虑对齐、填充和虚函数表
cpp
class MyClass {
char a; // 1字节
int b; // 4字节
double c; // 8字节
virtual void func() {} // 虚函数表指针
};
/*
内存布局(64位系统):
[vptr][vptr][vptr][vptr][vptr][vptr][vptr][vptr] // 8字节vptr
[a][填充][填充][填充][b][b][b][b] // 4字节int对齐到8字节边界
[c][c][c][c][c][c][c][c] // 8字节double
总大小:8(vptr) + 8(a+padding+b) + 8(c) = 24字节
而不是1+4+8+8=21字节,因为有对齐要求
*/2.2 构造与析构机制
内置类型:无构造/析构,只有简单初始化
cpp
int x; // 未初始化,值不确定
int y = 5; // 直接赋值
int z(10); // 直接初始化(非构造函数调用)自定义类型:编译器插入构造/析构调用
cpp
class Complex {
int* data;
public:
Complex() : data(new int[100]) { std::cout << "构造\n"; }
~Complex() { delete[] data; std::cout << "析构\n"; }
};
// 编译器的实际处理
void create_complex() {
// Complex obj;
// 编译器生成:
void* memory = __builtin_alloca(sizeof(Complex)); // 栈分配
Complex* obj = static_cast<Complex*>(memory);
Complex::Complex(obj); // 调用构造函数(名称修饰后)
// 作用域结束
Complex::~Complex(obj); // 调用析构函数
}2.3 数组处理差异
内置类型数组:纯内存分配
cpp
int* arr = new int[10];
/*
1. 调用operator new[](sizeof(int)*10)
2. 分配40字节(假设int为4字节)
3. 返回指针
4. delete[] arr直接释放内存
*/自定义类型数组:需要逐个构造/析构
cpp
class Widget {
public:
Widget() { std::cout << "Widget构造\n"; }
~Widget() { std::cout << "Widget析构\n"; }
};
Widget* widgets = new Widget[3];
/*
1. 调用operator new[](sizeof(Widget)*3 + sizeof(size_t))
(额外空间存储元素数量)
2. 分配内存:可能为[count][Widget][Widget][Widget]
3. 对每个元素调用默认构造函数
4. 返回指向第一个Widget的指针(跳过count)
delete[] widgets;
1. 获取元素数量(从指针前移sizeof(size_t)处)
2. 逆序调用每个元素的析构函数
3. 调用operator delete[]释放内存
*/问题示例:
cpp
Base* p = new Derived[5];
delete[] p; // 未定义行为!
/*
问题:
1. delete[]需要知道每个对象大小来调用析构函数
2. 通过Base指针无法确定Derived的正确大小
3. 编译器可能使用Base的大小,导致析构函数调用错误
*/三、operator new与operator delete本质剖析
3.1 全局版本的工作原理
operator new底层实现:
cpp
// 简化版全局operator new
void* operator new(size_t size) {
if (size == 0) size = 1; // 标准要求
while (true) {
// 尝试分配
void* p = std::malloc(size);
if (p) return p;
// 分配失败,获取new_handler
std::new_handler handler = std::get_new_handler();
if (!handler)
throw std::bad_alloc();
// 调用handler(可能释放一些内存)
handler();
}
}
// nothrow版本
void* operator new(size_t size, const std::nothrow_t&) noexcept {
try {
return operator new(size);
} catch (...) {
return nullptr;
}
}operator delete底层实现:
cpp
void operator delete(void* ptr) noexcept {
if (ptr) std::free(ptr);
}
// sized deallocation (C++14)
void operator delete(void* ptr, size_t size) noexcept {
// size参数有助于某些分配器优化
if (ptr) std::free(ptr);
}3.2 类特定版本的工作原理
类特定operator new:
cpp
class MemoryPool {
static std::vector<void*> allocated_chunks;
static const size_t CHUNK_SIZE = 4096;
static char pool[CHUNK_SIZE * 100];
static bool used[100];
public:
void* operator new(size_t size) {
// 检查大小是否匹配(考虑继承)
if (size != sizeof(MemoryPool)) {
return ::operator new(size); // 回退到全局版本
}
// 从池中分配
for (size_t i = 0; i < 100; i++) {
if (!used[i]) {
used[i] = true;
return pool + i * CHUNK_SIZE;
}
}
// 池满,分配新块
void* chunk = std::malloc(CHUNK_SIZE);
allocated_chunks.push_back(chunk);
return chunk;
}
void operator delete(void* ptr) {
if (!ptr) return;
// 检查是否来自池
if (ptr >= pool && ptr < pool + CHUNK_SIZE * 100) {
size_t index = (static_cast<char*>(ptr) - pool) / CHUNK_SIZE;
used[index] = false;
} else {
// 查找是否在额外分配的块中
auto it = std::find(allocated_chunks.begin(),
allocated_chunks.end(), ptr);
if (it != allocated_chunks.end()) {
std::free(ptr);
allocated_chunks.erase(it);
} else {
::operator delete(ptr); // 可能是通过基类指针删除
}
}
}
};3.3 对齐感知的分配 (C++17)
cpp
#include <new>
class alignas(64) CacheAligned {
char data[60];
public:
static void* operator new(size_t size) {
// C++17对齐分配
if (size != sizeof(CacheAligned)) {
return ::operator new(size);
}
// 使用对齐分配函数
#ifdef _WIN32
return _aligned_malloc(size, 64);
#else
void* ptr;
posix_memalign(&ptr, 64, size);
return ptr;
#endif
}
static void operator delete(void* ptr) {
#ifdef _WIN32
_aligned_free(ptr);
#else
free(ptr);
#endif
}
};3.4 new/delete表达式的完整展开
new表达式展开:
cpp
// 原始代码:MyClass* p = new MyClass(arg);
// 编译器展开:
MyClass* p;
try {
// 1. 分配内存
void* raw = MyClass::operator new(sizeof(MyClass));
// 2. 构造对象
p = static_cast<MyClass*>(raw);
// 2.1 对于非平凡类型,调用构造函数
// 编译器生成对构造函数的调用,可能是:
// __MyClass_ctor(p, arg); // 名称修饰后的构造函数
// 内联构造(如果构造函数简单)
p->MyClass::MyClass(arg);
} catch (...) {
// 3. 如果构造失败(抛出异常),释放内存
MyClass::operator delete(raw);
throw; // 重新抛出异常
}delete表达式展开:
cpp
// 原始代码:delete p;
// 编译器展开:
if (p != nullptr) {
// 1. 调用析构函数(对于非平凡类型)
// 如果是多态类型,通过虚函数表找到析构函数
p->~MyClass();
// 2. 释放内存
MyClass::operator delete(p);
}3.5 数组new[]/delete[]的隐藏机制
数组分配隐藏信息:
cpp
class Tracked {
static int count;
public:
Tracked() { ++count; }
~Tracked() { --count; }
};
Tracked* arr = new Tracked[5];
/*
实际分配的内存布局(典型实现):
┌──────────────┬─────────────────────────────────┐
│ 元素数量(5) │ Tracked[0]..Tracked[4] │
│ (size_t) │ │
└──────────────┴─────────────────────────────────┘
↑ ↑
分配返回的地址 用户得到的指针
编译器可能:
1. 分配 sizeof(size_t) + 5*sizeof(Tracked) 字节
2. 在开头存储元素数量
3. 返回指向第一个元素的指针
*/
// delete[] arr 需要:
// 1. 从 arr - sizeof(size_t) 处获取元素数量
// 2. 逆序调用析构函数
// 3. 释放整个内存块重要提醒:数组分配的具体实现是编译器相关的,但都必须正确处理构造和析构调用。
四、现代C++内存管理的最佳实践
4.1 智能指针的实现原理
unique_ptr简化实现:
cpp
template<typename T>
class UniquePtr {
T* ptr;
public:
explicit UniquePtr(T* p = nullptr) : ptr(p) {}
~UniquePtr() {
delete ptr; // 自动释放
}
// 删除拷贝构造/赋值
UniquePtr(const UniquePtr&) = delete;
UniquePtr& operator=(const UniquePtr&) = delete;
// 允许移动
UniquePtr(UniquePtr&& other) noexcept : ptr(other.ptr) {
other.ptr = nullptr;
}
UniquePtr& operator=(UniquePtr&& other) noexcept {
if (this != &other) {
delete ptr;
ptr = other.ptr;
other.ptr = nullptr;
}
return *this;
}
// 自定义删除器支持
template<typename Deleter>
UniquePtr(T* p, Deleter d) : ptr(p), deleter(d) {}
private:
// 删除器存储(通过类型擦除,如std::function或自定义机制)
};4.2 RAII(资源获取即初始化)原则
核心思想:将资源生命周期绑定到对象生命周期
cpp
class FileRAII {
FILE* file;
public:
explicit FileRAII(const char* filename, const char* mode)
: file(fopen(filename, mode)) {
if (!file) throw std::runtime_error("无法打开文件");
}
~FileRAII() {
if (file) fclose(file);
}
// 禁止拷贝
FileRAII(const FileRAII&) = delete;
FileRAII& operator=(const FileRAII&) = delete;
// 允许移动
FileRAII(FileRAII&& other) noexcept : file(other.file) {
other.file = nullptr;
}
FileRAII& operator=(FileRAII&& other) noexcept {
if (this != &other) {
if (file) fclose(file);
file = other.file;
other.file = nullptr;
}
return *this;
}
FILE* get() const { return file; }
};
void process_file() {
FileRAII file("data.txt", "r"); // 资源获取
// 使用file...
// 函数结束或异常时,自动调用析构函数释放资源
}4.3 内存管理决策树
需要内存分配?
├── 数据很小且生命周期短? → 使用栈分配
├── 数据大小在编译时已知? → 考虑std::array或栈数组
├── 需要共享所有权? → 使用shared_ptr
├── 需要独占所有权? → 使用unique_ptr
├── 需要自定义分配策略? → 重载operator new/delete或使用allocator
├── 需要异常安全? → 使用RAII包装器
└── 性能关键,大量小对象? → 考虑内存池或对象池五、关键总结
-
内存管理层次:
- 最底层:操作系统虚拟内存系统
- 中间层:C运行时库(malloc/free)
- C++层:operator new/delete
- 用户层:new/delete表达式、智能指针
-
类型处理差异本质:
- 内置类型:简单内存操作
- 自定义类型:构造/析构语义 + 内存操作
-
operator new/delete本质:
- 是函数,可重载
- 负责原始内存分配/释放
- 与构造/析构分离
-
现代C++实践:
- 优先使用智能指针
- 遵循RAII原则
- 理解底层机制以优化关键代码
理解这些底层机制不仅能帮助你避免内存错误,还能在需要时实现高效的自定义内存管理策略。