本文介绍机器人集群的协同定位和群体的路径规划,并给出MATLAB例程的运行结果演示
文章目录
课题概述
多机器人协同定位指多个机器人通过相互通信和协作,共同估计各自的位置和环境地图。
群体智能算法(如粒子群优化 P S O PSO PSO、蚁群算法 A C O ACO ACO)可以有效优化路径规划、修正定位误差。
核心技术要点
协同定位机制:机器人之间共享传感器数据和位置信息,通过相对观测减少累积误差。每个机器人既是定位者也是被定位对象,形成分布式估计网络。
群体智能优化 :利用 P S O PSO PSO算法优化机器人的运动轨迹和观测策略,使得整体定位不确定性最小化。通过集群行为实现全局最优解搜索。
误差修正策略 :采用扩展卡尔曼滤波( E K F EKF EKF)进行状态估计,结合群体智能算法动态调整协方差矩阵和观测权重,实时修正定位误差。
系统架构
系统包含三个主要模块:
- 定位估计模块:基于里程计和相对观测的EKF融合
- 路径规划模块:PSO优化的协同路径生成
- 误差修正模块:群体智能驱动的自适应校准
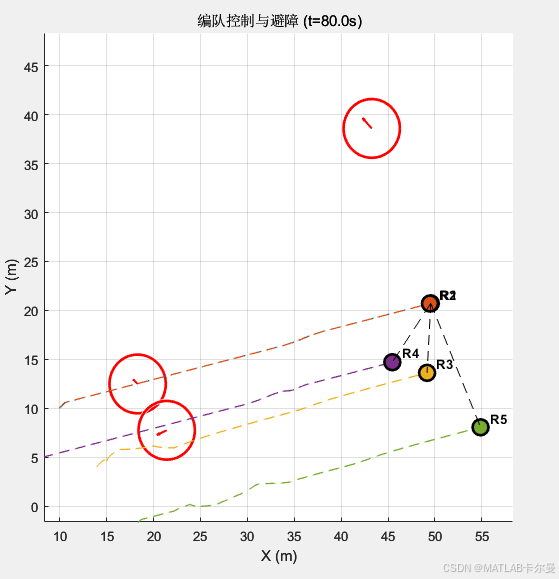
MATLAB运行结果示例

关键性能指标
- 定位精度
- 收敛速度
- 通信效率
- 鲁棒性
优化方向
参数自适应:根据环境密度动态调整PSO参数w、c1、c2,在开阔区域增大探索,在拥挤区域增强收敛。
多传感器融合:将激光雷达、视觉等传感器数据通过信息论框架融合到EKF中,提高观测质量。
分层架构:采用领导-跟随结构,领导者使用PSO全局规划,跟随者使用快速反应式控制,提升实时性。
异构机器人协同:不同传感器配置的机器人优势互补,通过信息增益最大化分配观测任务。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者