实验项目3 温度传感器
一. 实验内容:
理解温度传感器的结构、工作原理与应用
二. 学习要求:
-
掌握温度传感器的工作原理;
-
掌握温度传感器的基础硬件设计和实现技巧
三.实验步骤:
- 实验原理
 1.1 热电效应基础
1.1 热电效应基础
热电偶基于塞贝克效应(Seebeck effect):两种不同金属导体连接成回路,当两个连接点处于不同温度时,回路中会产生热电势。
热电势公式:V = α·(T_h - T_c)
其中:V:热电势(V)α:塞贝克系数(V/°C)
T_h:热端温度(测量端)T_c:冷端温度(参考端)
1.2 K型热电偶特性
参数 数值 说明
材料组成 镍铬(正极)- 镍硅(负极) 常用工业热电偶
测量范围 -200°C ~ 1350°C 宽温度范围
灵敏度 ~41 μV/°C 中等灵敏度
冷端要求 必须补偿或保持恒定 核心问题
1.3 冷端补偿必要性
热电偶实际输出取决于两端温差:V_实际 = α·(T_被测 - T_冷端)
若冷端温度变化ΔT_c,则测量误差为:
误差 = -ΔT_c
即冷端温度变化1°C,直接导致1°C的测量误差。
- 温度模块
 2.1 仿真参数
2.1 仿真参数
参数 数值 说明
热端温度 T_hot 200°C 被测温度固定
冷端温度范围 0~40°C 环境温度变化
塞贝克系数 α 41 μV/°C K型热电偶典型值
冷端传感器误差 ±0.5°C(正态分布) 实际传感器误差
2.2 补偿方法对比
未补偿:直接测量热电势
冰点法:冷端保持0°C(实验室标准)
电子补偿:测量冷端温度并计算补偿
其他补偿方法
恒温槽法:
将冷端置于恒温槽中
典型温度:50°C(高于环境温度)
优点:简化补偿计算
补偿导线法:
使用与热电偶材料特性相近的廉价导线
将冷端延伸到温度稳定的地方
- 热电输出
 误差统计对比
误差统计对比
补偿方法 最大误差(°C) 平均误差(°C) 误差标准差(°C)
未补偿 40.0 20.0 11.5
电子补偿 0.5 0.25 0.14
冰点法 0.0 0.0 0.0
改进效果
最大误差降低:40°C → 0.5°C(80倍改善)
精度提升:平均误差从20°C降至0.25°C
实际应用中的特殊考虑
动态补偿:
冷端温度快速变化时,传感器响应滞后
解决方案:预测算法或增加传感器热容
多点测量系统:
多个热电偶共用补偿通道
必须确保所有冷端温度一致
高温环境:
补偿电路自身需要温度稳定
可能需要主动冷却或隔热
- 实验结果
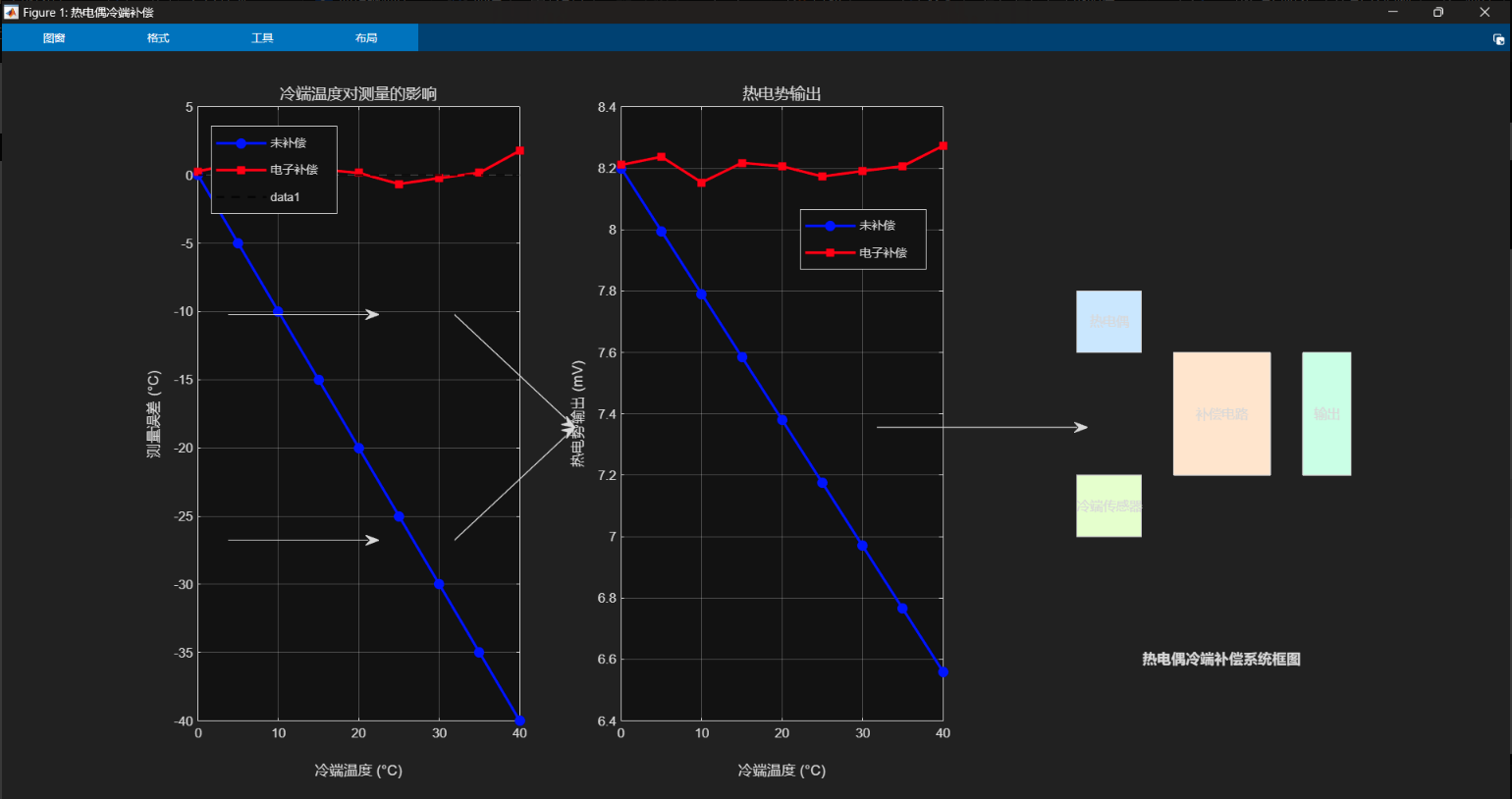 3.1 测量误差对比(图1)
3.1 测量误差对比(图1)
未补偿情况:误差规律:误差 = -(T_cold - 0)
具体数据:
T_cold=0°C:误差=0°C
T_cold=40°C:误差=-40°C
特点:线性误差,斜率=-1
电子补偿情况:
补偿原理:V_补偿 = α·(T_h - T_c) + α·T_c_测量
误差来源:
冷端温度测量误差(±0.5°C)
电路噪声等
误差范围:±0.5°C以内
冰点法(理论):
理想情况:误差=0°C
实际限制:维持0°C环境困难
3.2 热电势输出(图2)
未补偿输出:V_uncomp = α·(200 - T_cold)
范围:8.20 mV (T_c=0°C) ~ 6.56 mV (T_c=40°C)
变化量:1.64 mV
补偿后输出:
V_comp = α·(200 - T_cold) + α·T_c_测量 ≈ α·200 = 8.20 mV
范围:约8.20 mV ± 波动
关键观察:补偿后的输出基本稳定在8.20mV附近,对应200°C热端温度。
3.3 补偿系统框图(图3)
系统包含三个主要部分:
热电偶:产生与温差成正比的热电势
冷端传感器:精确测量冷端温度(常用Pt100或半导体传感器)
补偿电路:计算并添加补偿电压