摘要:随着智能交通系统与计算机视觉技术的快速发展,基于深度学习的车辆识别在交通管理、安全监控和智慧城市建设中具有重要的应用价值。针对传统车辆识别方法依赖人工特征、适应性和实时性不足的问题,本文设计并实现了一种面向车辆识别的基于 YOLOv11 的深度学习检测与统计分析系统。
作者:Bob(原创)
项目概述
在智能交通与城市安防等应用场景中,车辆目标的自动检测与类别识别是视频结构化理解的重要基础。传统基于人工特征的车辆识别方法在复杂光照、遮挡及视角变化条件下鲁棒性不足,且难以兼顾检测精度与实时性。为此,本文围绕车辆识别任务,提出并实现一种基于 YOLOv11 的车辆检测与类别识别方法,并构建配套的检测结果统计分析系统,以提升车辆识别的工程可用性与数据分析能力。
本文以 YOLOv11 为核心框架,针对车辆识别需求构建"检测---分类一体化"模型,实现车辆品牌与车型类别的联合识别;同时设计面向应用的推理流程与参数控制机制,引入置信度阈值与交并比阈值调节以适配不同场景。进一步地,本文开发了基于 PySide6 的可视化平台,实现图像、视频与摄像头多源输入下的在线推理、结果可视化与记录管理,并基于数据库对检测结果进行统计汇总,完成品牌分布、车型分布及来源占比等可视化分析,从而形成"识别---存储---统计---分析"的闭环。
实验与系统测试结果表明,所提出的方法在典型车辆数据上能够获得较好的检测与识别效果,并在实时输入条件下保持稳定的推理速度与运行可靠性。研究结果验证了基于 YOLOv11 的车辆检测与识别方案在实际应用中的可行性,并为后续车辆行为分析与交通数据挖掘提供了基础支撑。
算法概述
YOLO11是Ultralytics YOLO系列实时目标检测模型的最新迭代版本,在检测精度、推理速度与计算效率等方面均取得了显著提升。该模型在继承以往 YOLO 系列优势的基础上,对网络架构设计与训练策略进行了系统性改进,从而在保证实时性的同时进一步增强了特征表达能力与检测鲁棒性。得益于上述改进,YOLO11 不仅在目标检测任务中表现出色,还能够有效扩展至图像分类、实例分割、目标跟踪及姿态估计等多种计算机视觉任务,展现出良好的通用性与应用潜力。
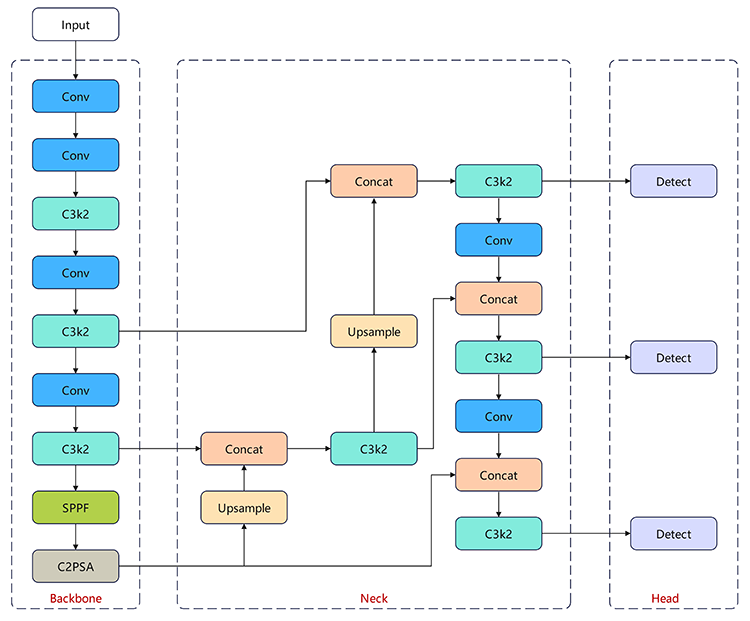
图1 YOLO11 网络结构示意图
图中给出了YOLO11的整体网络结构,模型采用Backbone--Neck--Head的分层设计框架。Backbone负责特征提取,Neck通过多尺度特征融合增强对不同尺寸目标的感知能力,Head在多尺度特征图上进行预测输出,从而提高目标检测的精度与稳定性。
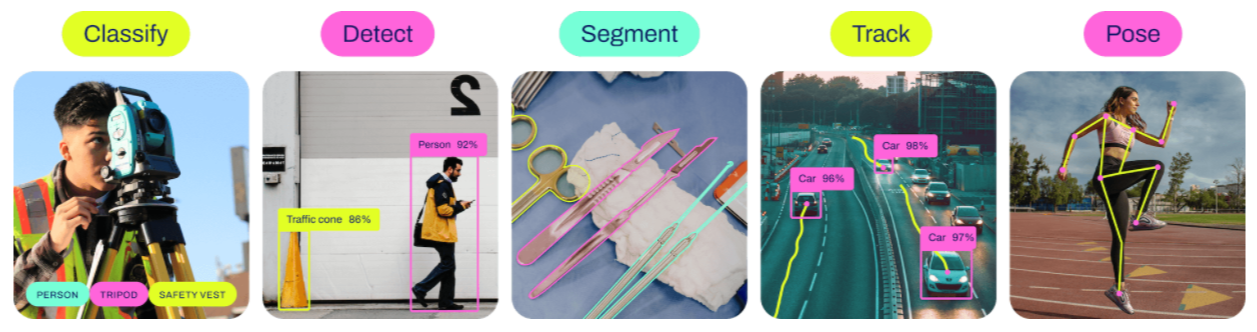
图2 YOLO11支持的多任务视觉能力示意图
图中展示了YOLO11在统一框架下支持的多种计算机视觉任务,包括图像分类、目标检测、实例分割、目标跟踪以及姿态估计。该统一建模方式有效提升了模型的通用性与扩展能力,使 YOLO11 能够适配多样化的计算机视觉应用场景。
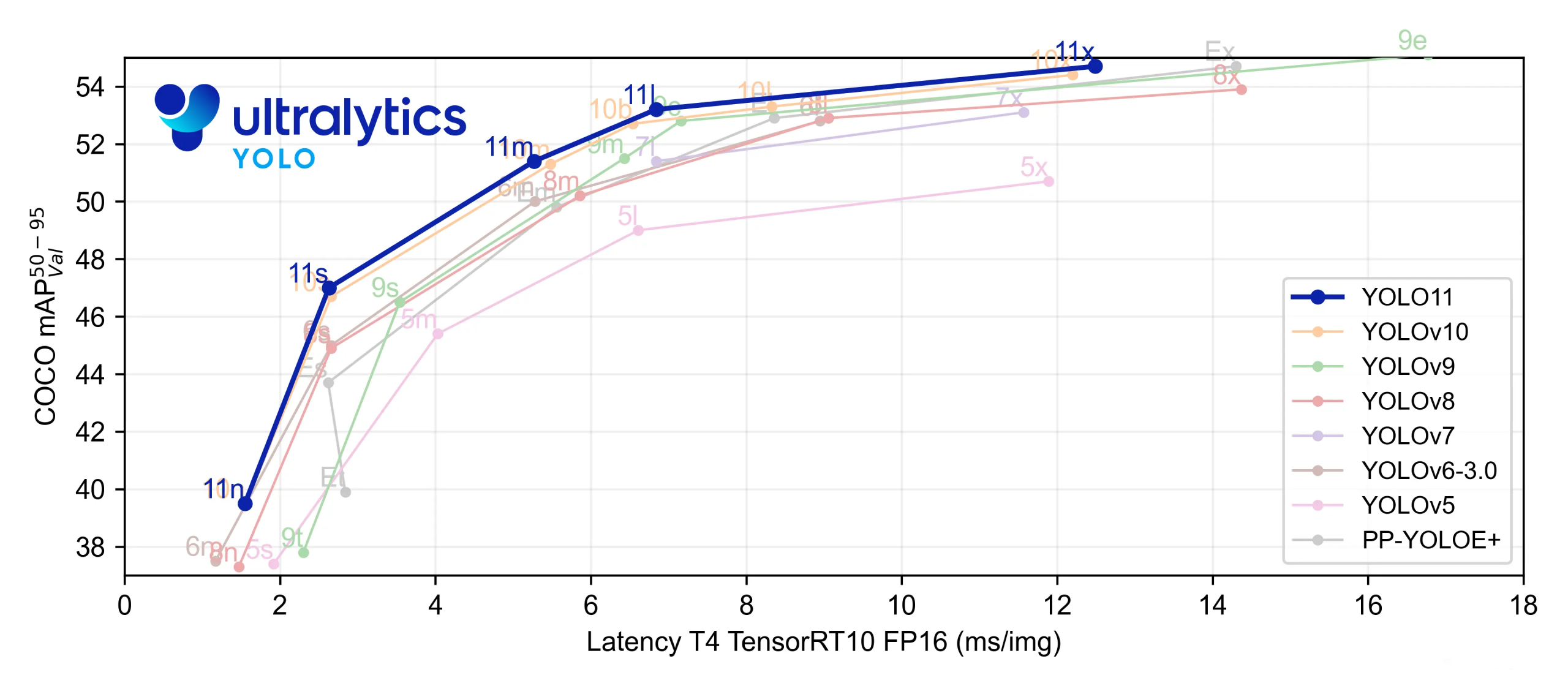
图3 YOLO11与历代YOLO模型的精度--延迟对比图
图中展示了在NVIDIA T4 + TensorRT 10 + FP16推理配置下,不同YOLO系列模型在 COCO val 数据集上的检测精度(mAP50--95)与推理延迟(ms/img)之间的性能权衡关系。实验结果表明,YOLO11在相同或更低推理延迟条件下取得了更高的检测精度,在速度与准确率之间实现了更优的权衡,体现了其在实时目标检测任务中的性能优势。
系统设计
系统整体采用模块化设计思想,基于 YOLOv11 构建车辆检测与分类模型,并结合可视化界面与统计分析模块,实现车辆识别、结果管理与数据分析的一体化应用。
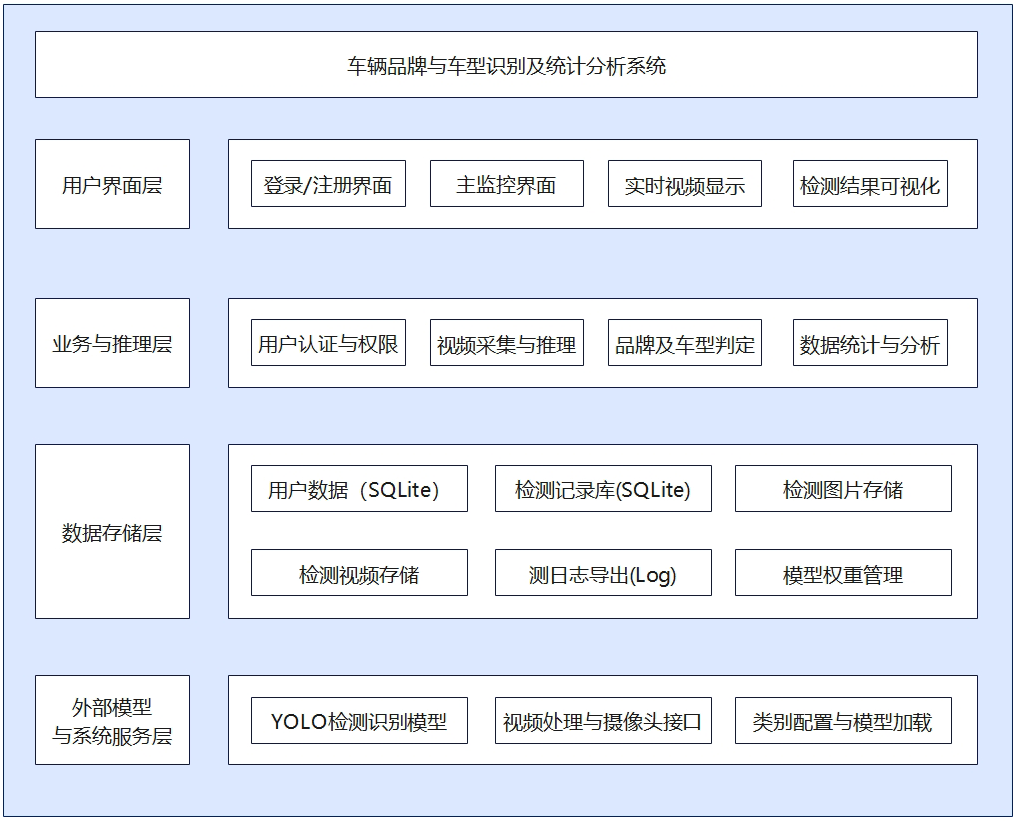
图4 系统总体架构图
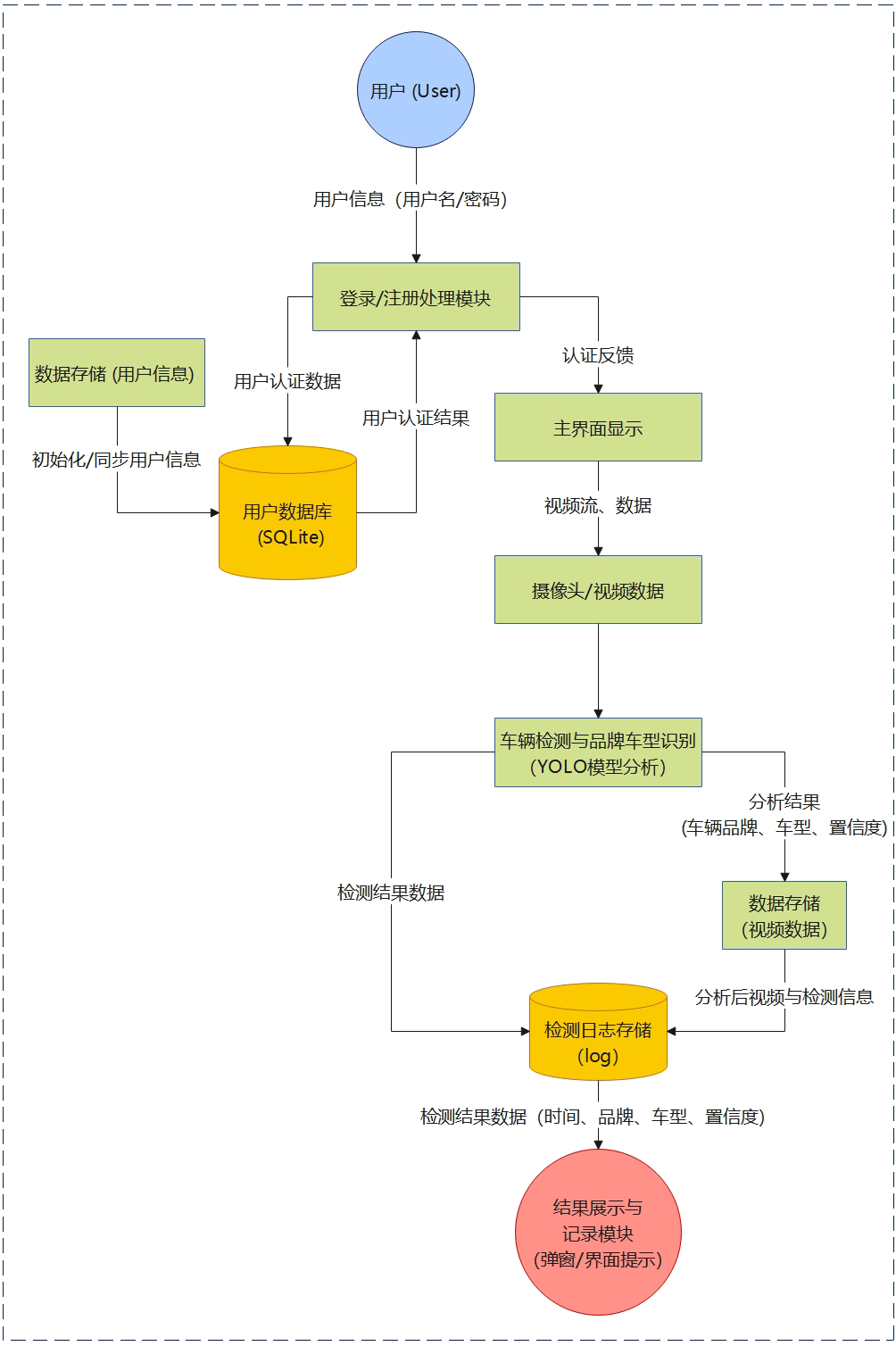
图5 数据流图
硬件配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
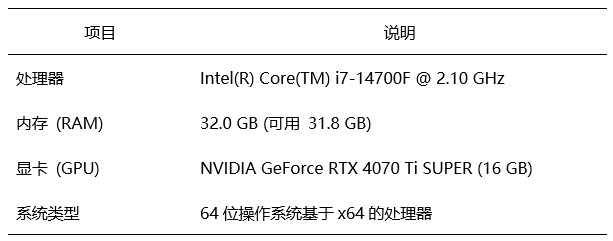
表1 惠普(HP)暗影精灵10台式整机配置(系统硬件配置)
软件环境
对本实验所需的各类软件及工具的基本信息进行了清晰汇总。
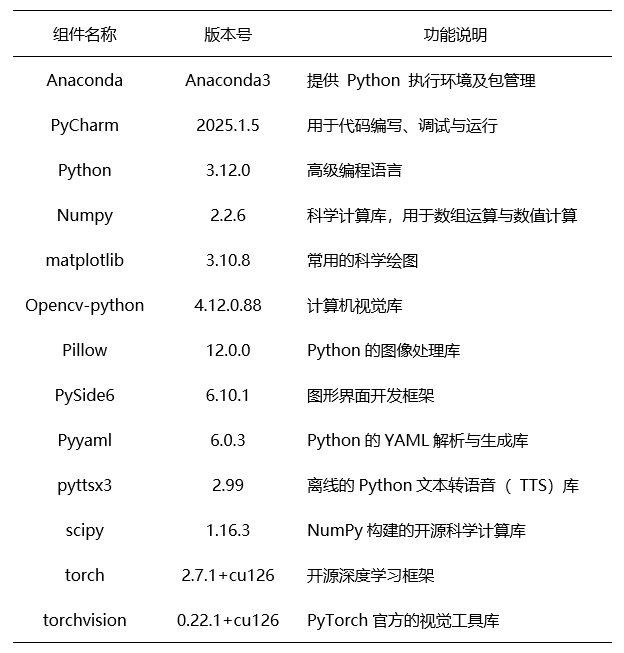
表2 系统软件配置(真实运行环境)
数据集构建
1.数据来源
本系统采用自建、具有自主知识产权的车辆品牌与车型识别数据集。该数据集主要围绕道路交通与停车场等真实应用场景下的车辆外观特征进行构建,面向智能交通、车辆管理与辅助决策等任务需求,重点服务于车辆品牌识别与车型类型识别两类核心功能。数据集共涵盖 13 个典型类别,其中品牌类 7 类:奥迪(Audi)、宝马(BMW)、保时捷(Porsche)、奔驰(Mercedes)、大众(Volkswagen)、丰田(Toyota)、特斯拉(Tesla);车型类 6 类:轿车(Sedan)、跑车(Coupe)、皮卡(Pickup)、SUV、MPV、卡车(Truck)。每一类别都包含了大量高质量的图像和视频样本,覆盖了不同品牌和车型,确保了数据的代表性和多样性,能较真实地反映现实应用环境中的行为变化特征。

图6 数据集图片
2.数据增强
为提高车辆品牌与类型识别系统在复杂交通与监控场景下的泛化能力与鲁棒性,本文在原始车辆品牌/车型数据集基础上引入多种图像数据增强策略,对训练样本进行扩展与扰动处理。通过对样本实施多样化的增强操作,可有效缓解因车辆类别样本量差异、拍摄视角与光照条件不均、以及遮挡与运动模糊等因素导致的模型过拟合问题,从而提升系统在真实道路、停车场与摄像头监控环境中的检测稳定性与品牌/车型识别准确性。
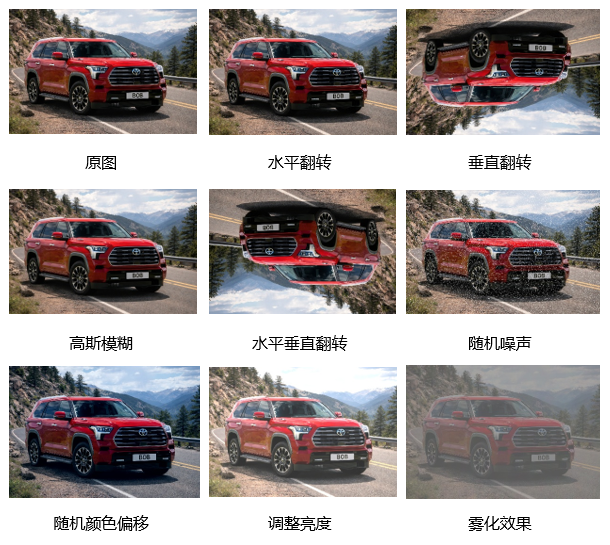
图7 数据集图像增强方法示例
在实现过程中,本文面向车辆品牌与车型识别的成像特点,采用几何变换与图像质量扰动相结合的数据增强策略,以提升模型在多视角、多光照与复杂背景下的鲁棒性。几何变换包括水平/垂直及组合翻转,用于模拟摄像机角度与车辆行驶方向变化;质量扰动包括高斯模糊、随机噪声、雾化(低对比度)、颜色偏移与亮度调节,用于模拟雨雾、光照波动、运动模糊等真实监控干扰。
数据增强显著提升了样本多样性,使模型学习到更稳健的车辆结构与细粒度标志特征。实验结果表明,增强后模型在各品牌与车型类别上的整体识别性能提升,增强了系统在真实道路监控环境中的适应能力。
3.标注格式
本研究采用YOLO系列目标检测算法通用的标注格式对数据集进行标注。如图所示,YOLO标注文件以文本形式存储,每行对应一个目标实例,主要包含目标类别编号、边界框中心点的相对坐标以及边界框的相对宽度和高度。所有坐标信息均采用相对于原始图像尺寸的归一化表示,取值范围为0至1,从而减少不同分辨率图像对模型训练的影响,并提高模型在多尺度目标检测任务中的适应性。
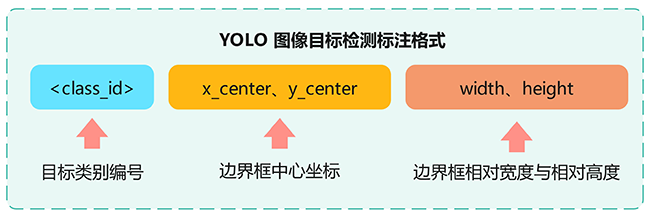
图8 YOLO 图像目标检测标注格式示意图
4.数据集划分
为保证模型在训练与测试阶段的客观性、稳定性与评估可靠性,本文对构建的车辆品牌与车型识别数据集进行了科学划分,将其分为训练集、验证集和测试集三部分。数据集按照 70% / 20% / 10% 的比例进行划分,其中训练集包含 2186 张图像,主要用于 YOLO11 模型参数学习与车辆外观特征表示能力的建立;验证集包含 624 张图像,用于模型超参数调优、训练过程监控以及中间性能评估;测试集包含 313 张图像,用于在完全未参与训练的条件下,对模型最终的车辆品牌与车型识别性能进行客观验证。该数据划分策略能够有效避免数据泄漏问题,并有助于系统性分析模型在复杂道路与监控场景下的泛化能力与实际应用表现。
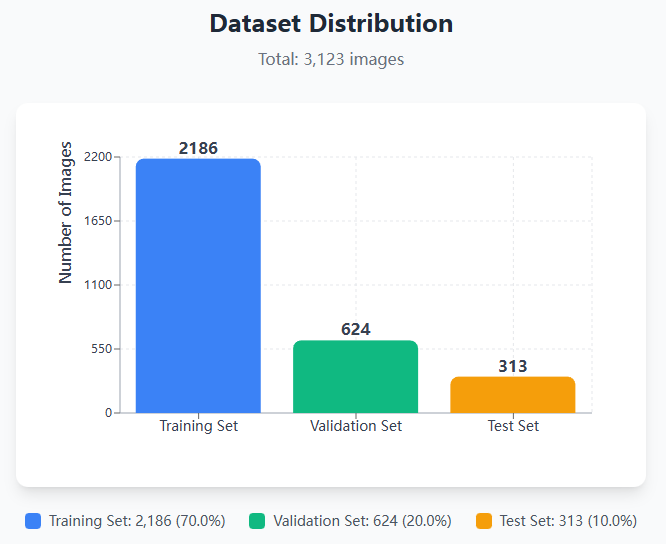
图9 数据集在训练、验证和测试集上的分布
模型训练
模型训练流程如下:首先对车辆品牌与车型数据集进行规范标注,并按 YOLO 标准格式生成标签文件;随后对样本进行尺寸归一化与数据增强处理,以提升模型在多视角、多光照及遮挡等复杂交通监控场景下的鲁棒性。在此基础上构建 YOLO11 目标检测模型,并加载预训练权重进行迁移学习。训练过程中通过前向与反向传播持续优化模型参数,并在验证集上进行性能评估与超参数调优,最终保存指标最优的模型权重(best.pt),用于车辆品牌与类型识别系统的部署与应用。
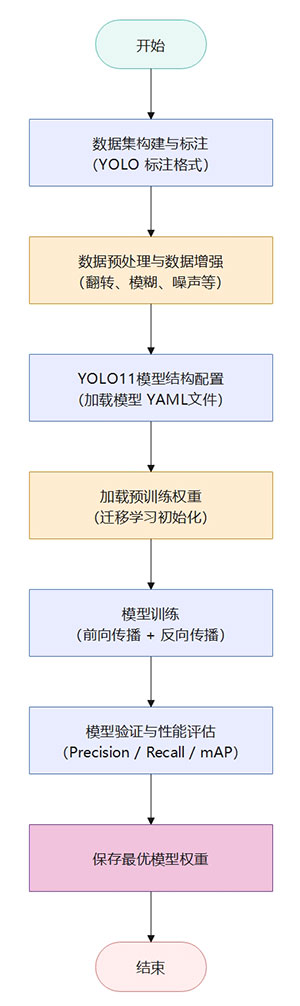
图10 模型训练流程图
运行:train_v11.py
1.模型训练过程分析
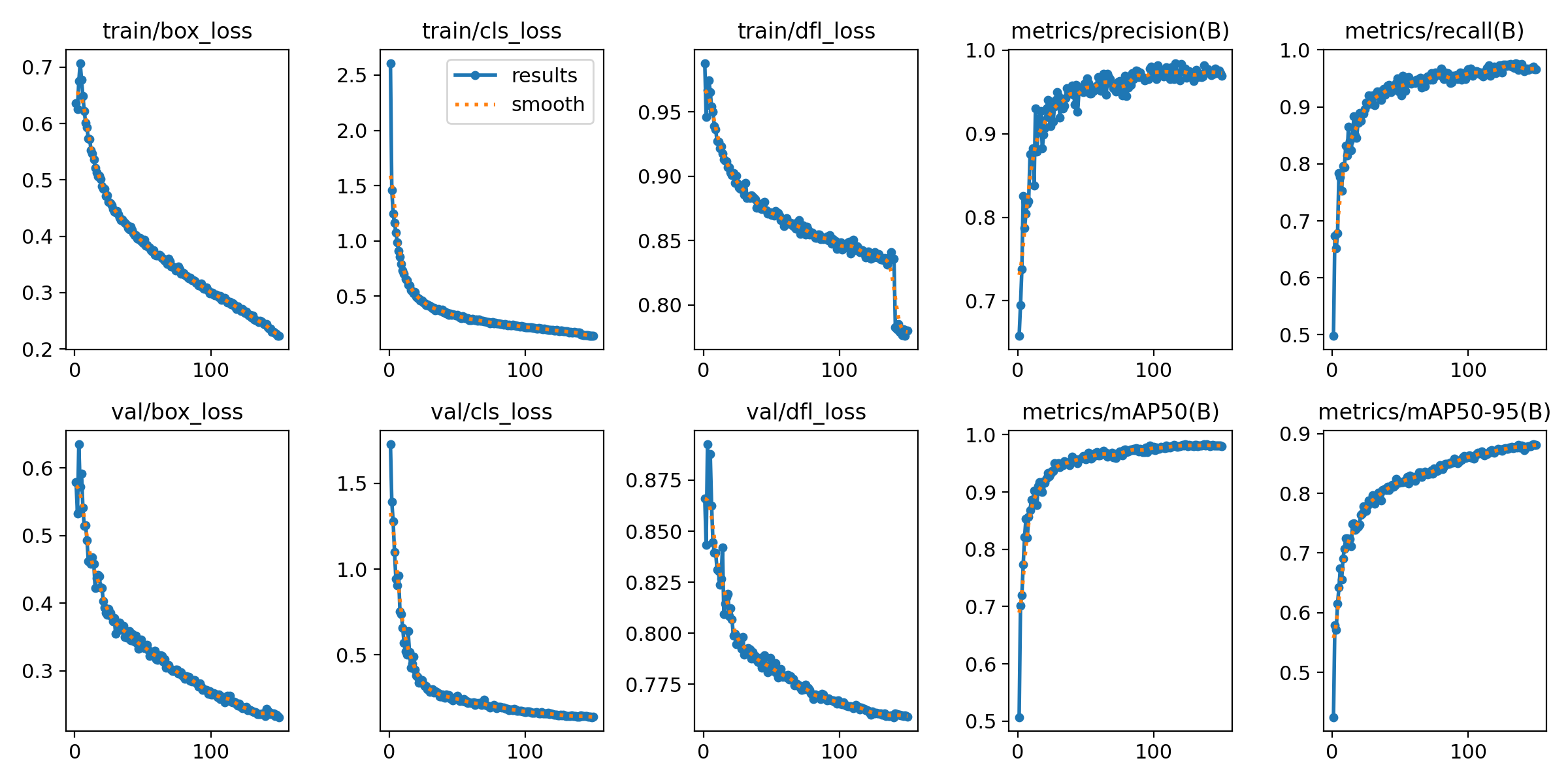
图11 YOLOv11 模型训练与验证损失函数变化曲线
从训练结果曲线可以看出,YOLO11 模型在训练与验证阶段的各项损失函数均稳定下降,Precision、Recall 以及 mAP@50 和 mAP@50--95 指标持续提升并逐步收敛,表明模型训练过程稳定,最终在车辆品牌与车型识别任务上取得了良好的检测性能与泛化能力。
2.检测性能曲线分析
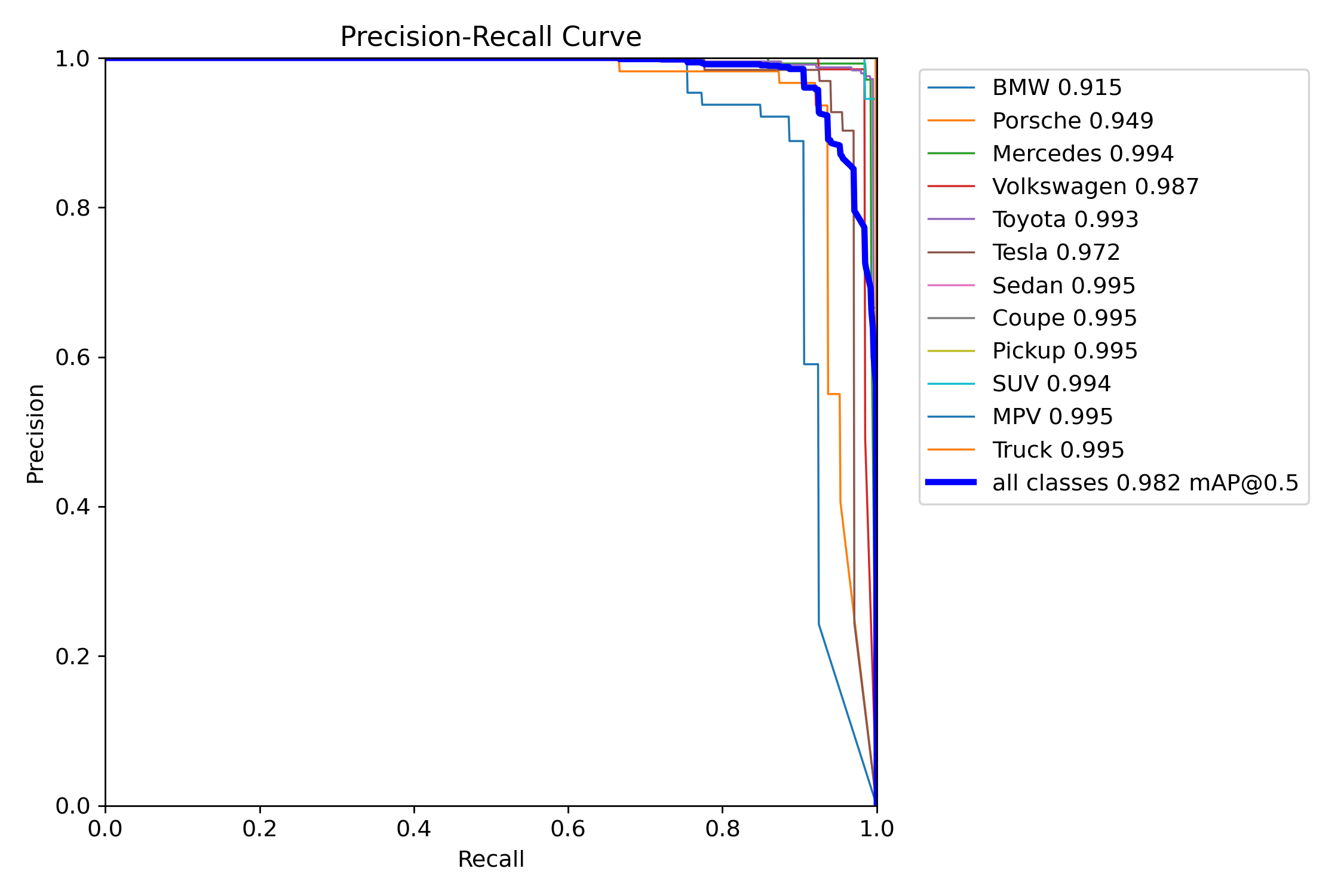
图12 Precision--Recall 曲线(PR 曲线)
从 Precision--Recall 曲线可以看出,模型在各车辆品牌与车型类别上均保持较高的精确率与召回率,整体 mAP@0.5 达到 0.982,表明基于 YOLO11 的车辆品牌与类型识别模型在多类别检测任务中具有优良的综合性能与稳定性。
3.分类与识别效果分析
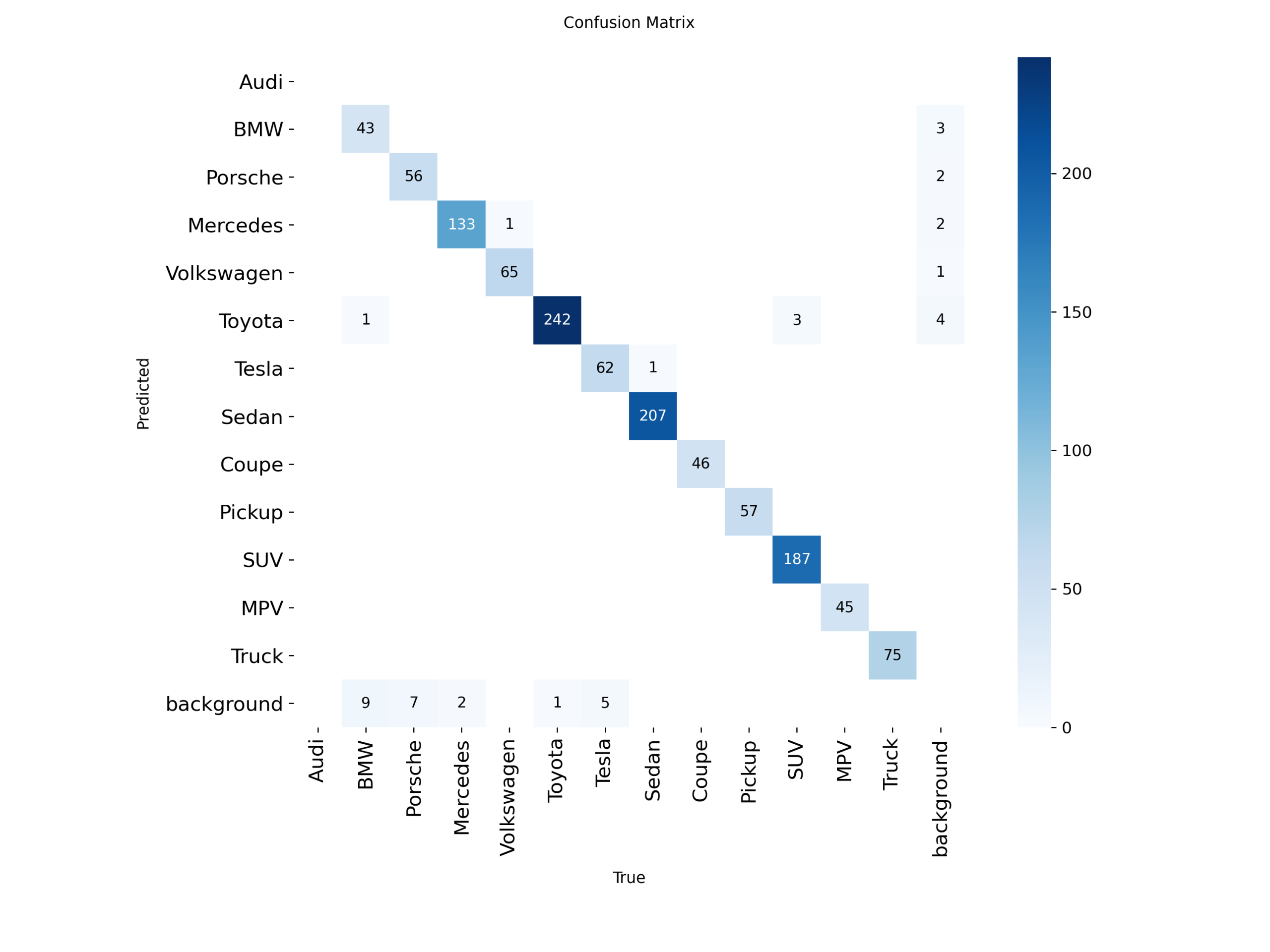
图13 混淆矩阵
从混淆矩阵可以看出,模型在各车辆品牌与车型类别上的预测结果主要集中在对角线区域,仅在少数外观相近类别之间存在轻微混淆,整体分类准确性较高,表明基于 YOLO11 的车辆品牌与类型识别模型具有良好的判别能力与稳定性。
4.最终性能结果汇总
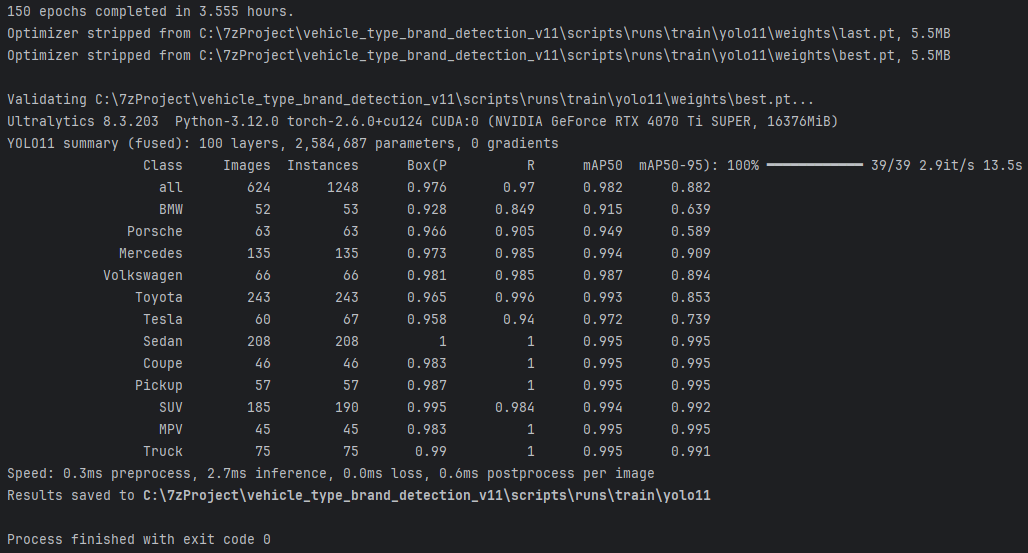
图14 YOLOv11 模型训练完成后的性能评估结果
实验结果表明,经过 150 个训练轮次后,YOLO11 模型在车辆品牌与车型识别任务上取得了优异性能,整体 mAP@0.5 达到 0.982、mAP@0.5--0.95 达到 0.882,各类别精确率与召回率均保持较高水平,验证了模型在复杂场景下的检测准确性与稳定性。
模型推理
模型推理阶段通过加载训练得到的最优模型权重,对输入图像进行前向推理,输出目标的类别、置信度及位置信息,并经非极大值抑制筛选后生成最终检测结果,实现对异常行为检测。
运行:imgTest.py

图15 人员异常行为检测与识别智能安防监控检测结果示意图
在单张图片测试中,系统以 112.9 ms 完成推理并成功识别出 Tesla 品牌与 SUV 车型(输入分辨率 384×640),表明模型具备良好的单帧检测效率与识别准确性。
运行展示
登录和注册

图16 登录注册主界面

图17 注册最低3个字符
图18 登录成功
系统运行
图19 系统主界面
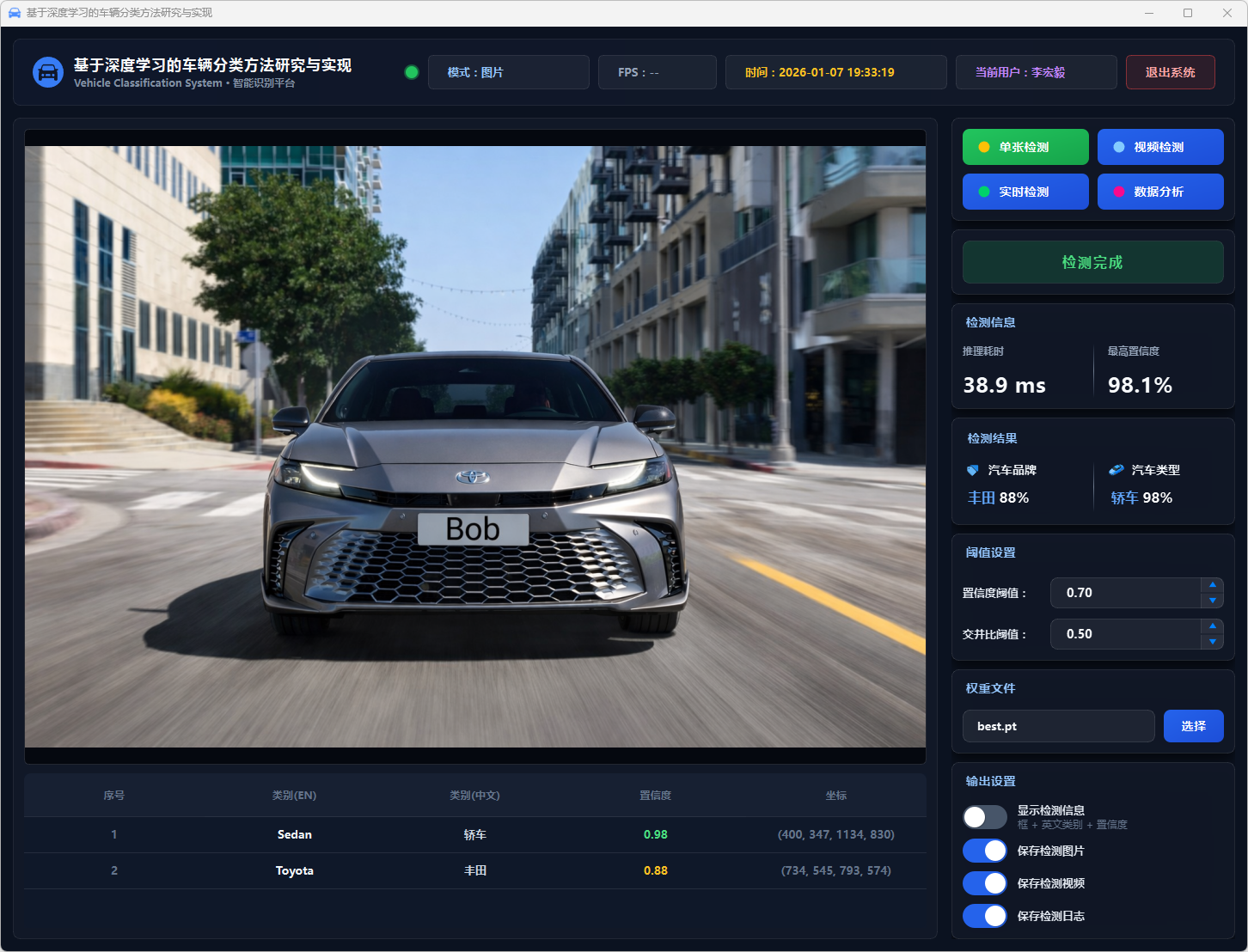
图20 单张检测:丰田(轿车)
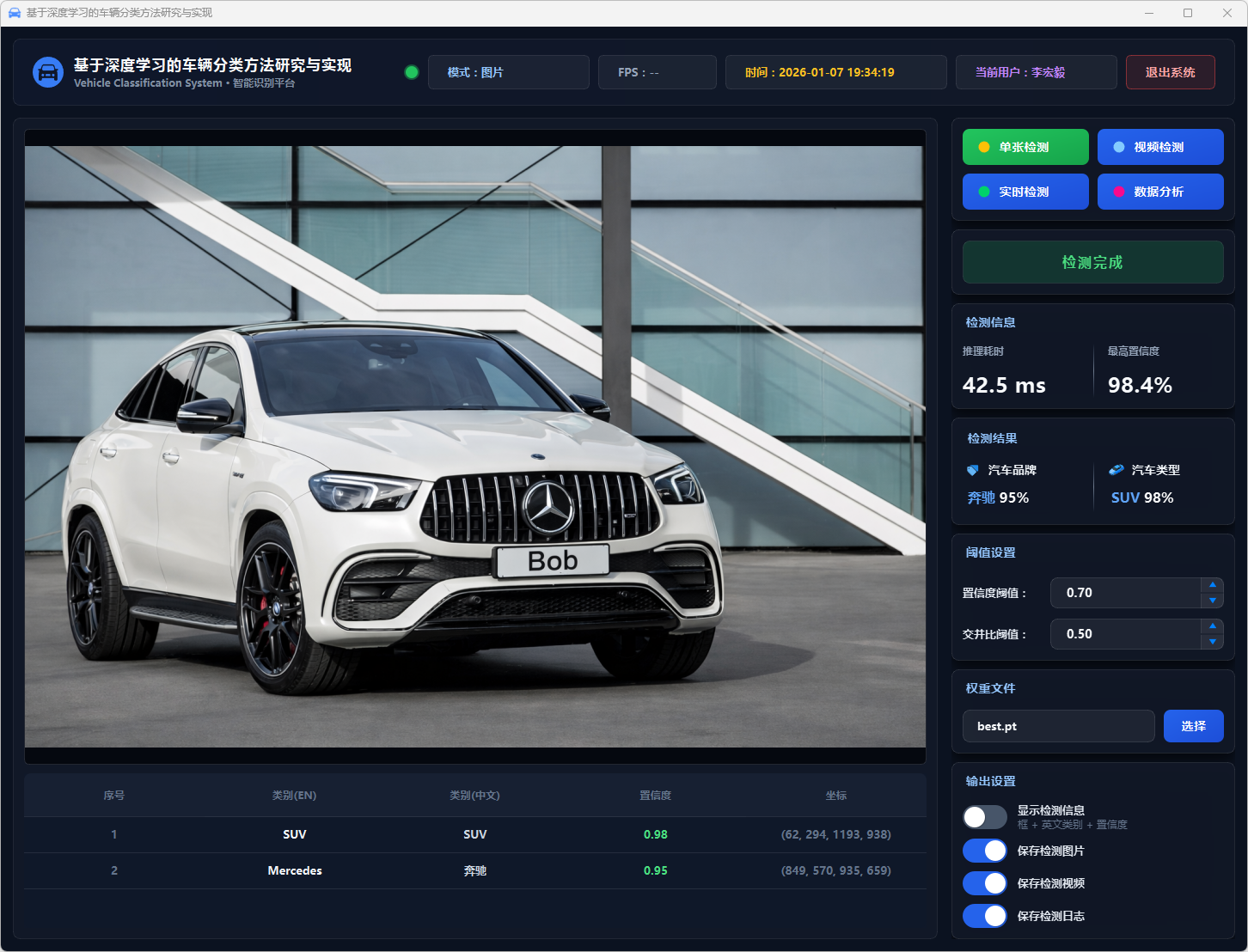
图21 单张检测:奔驰(SUV)
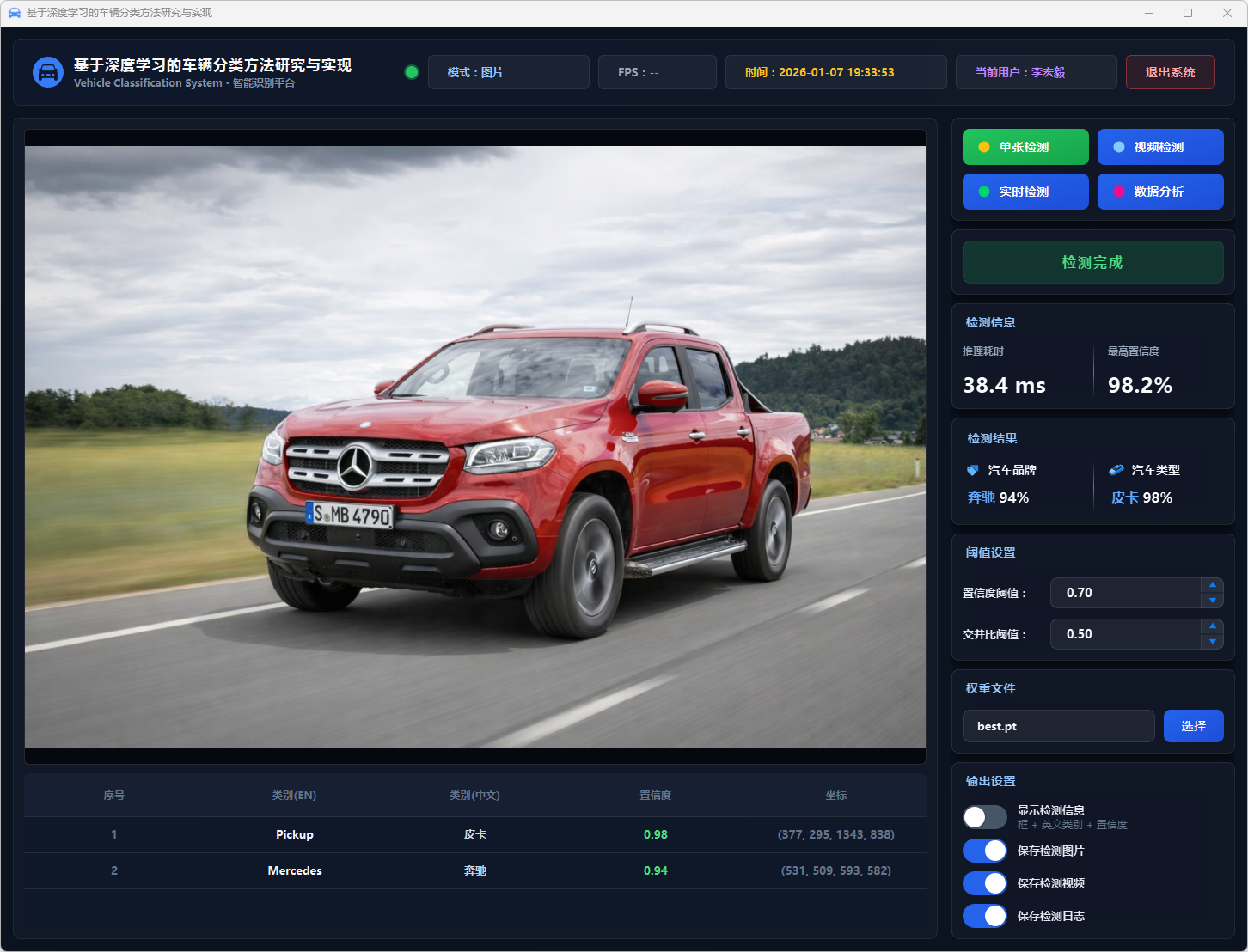
图22 单张检测:奔驰(皮卡)

图23 单张检测:大众(SUV)

图24 单张检测:奔驰(卡车)
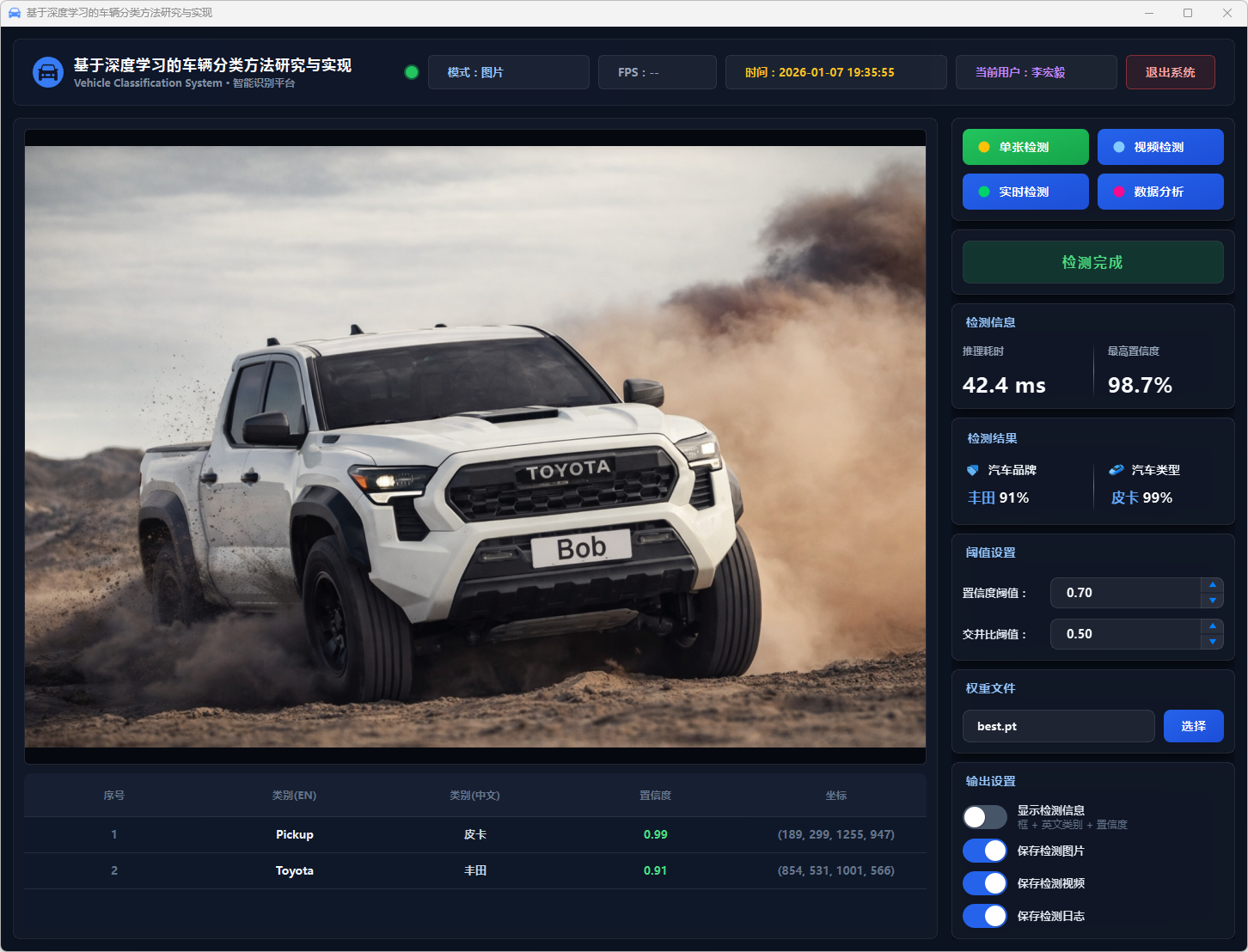
图25 单张检测:丰田(皮卡)
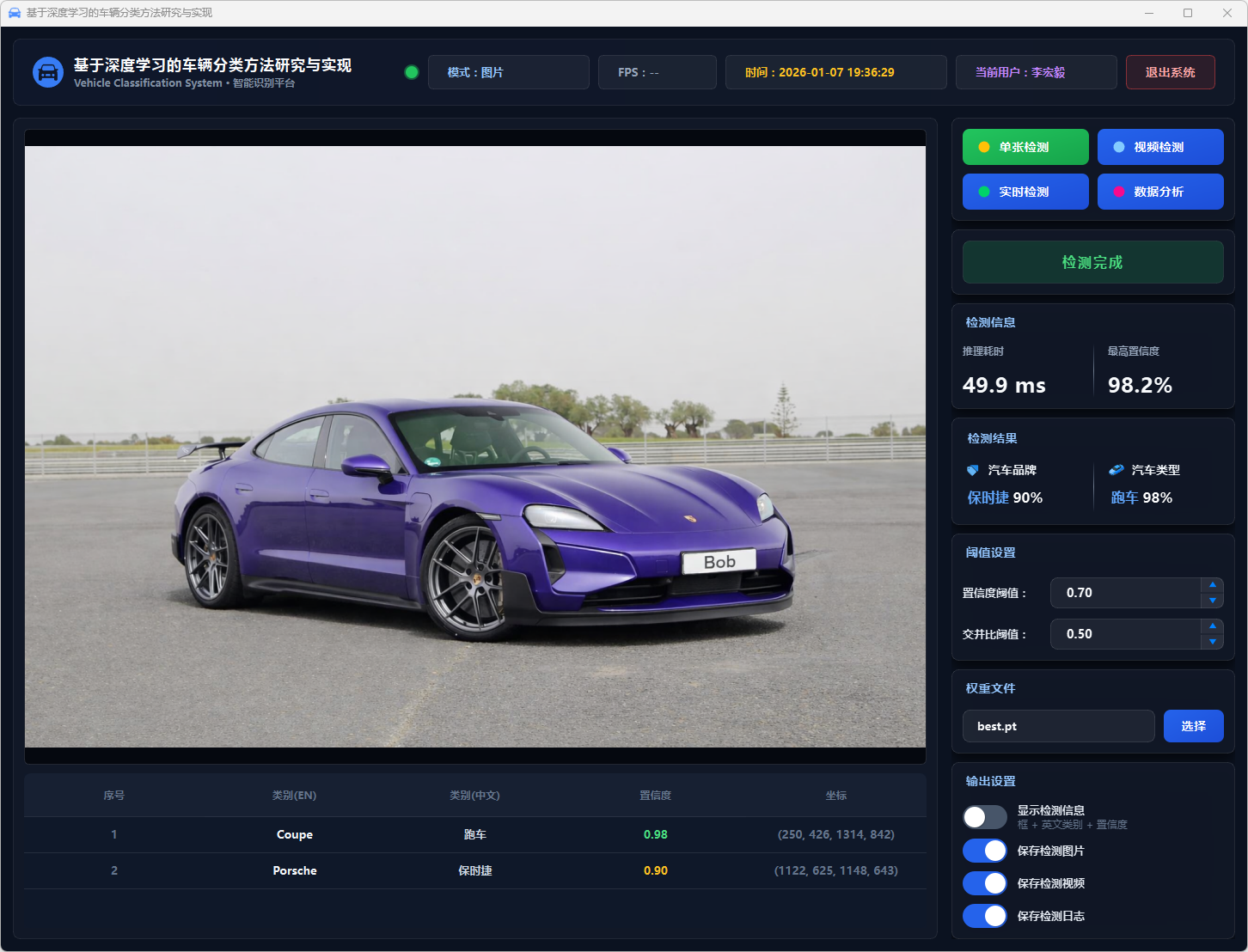
图26 单张检测:保时捷(跑车)
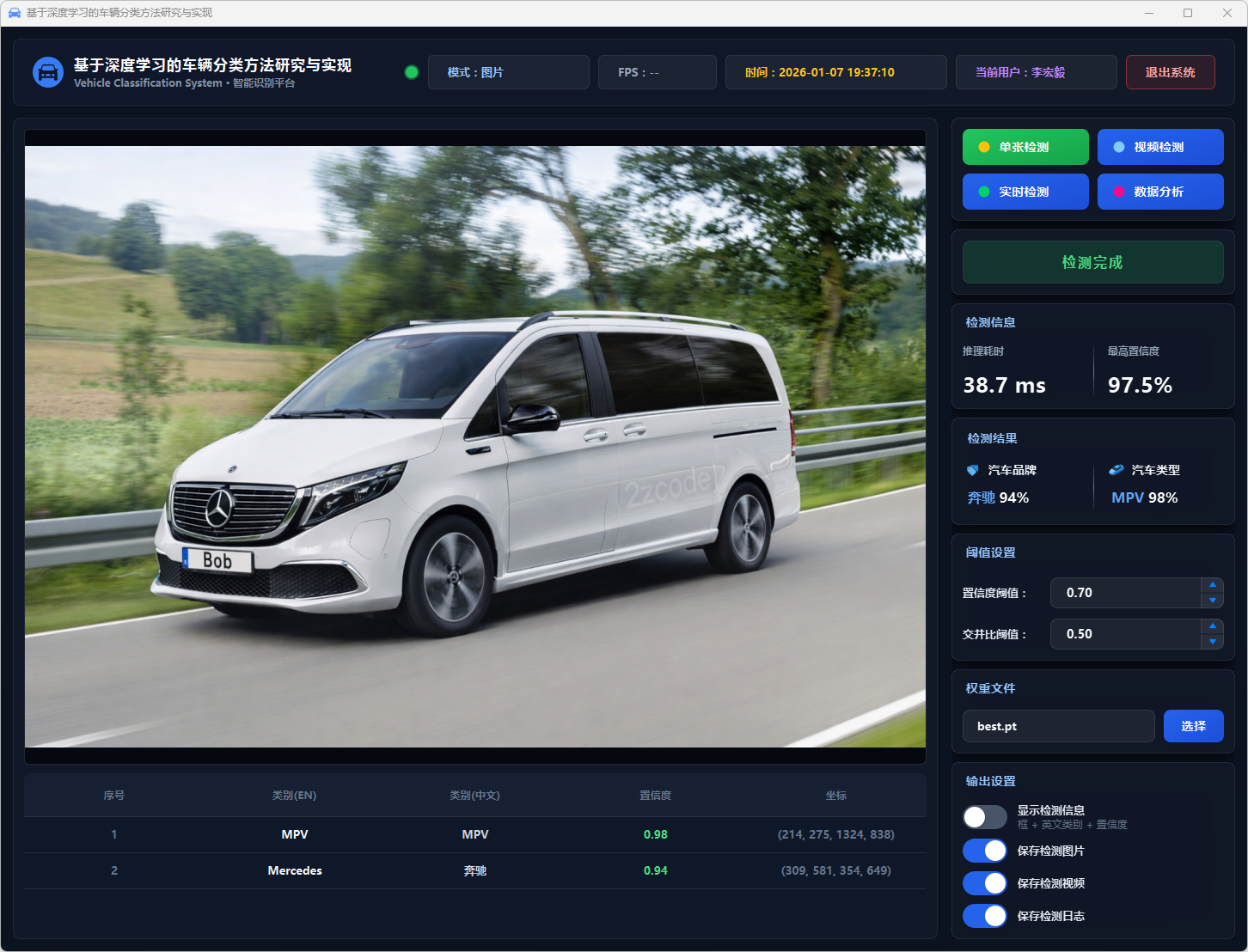
图27 单张检测:奔驰(MPV)

图28 单张检测:特斯拉(SUV)
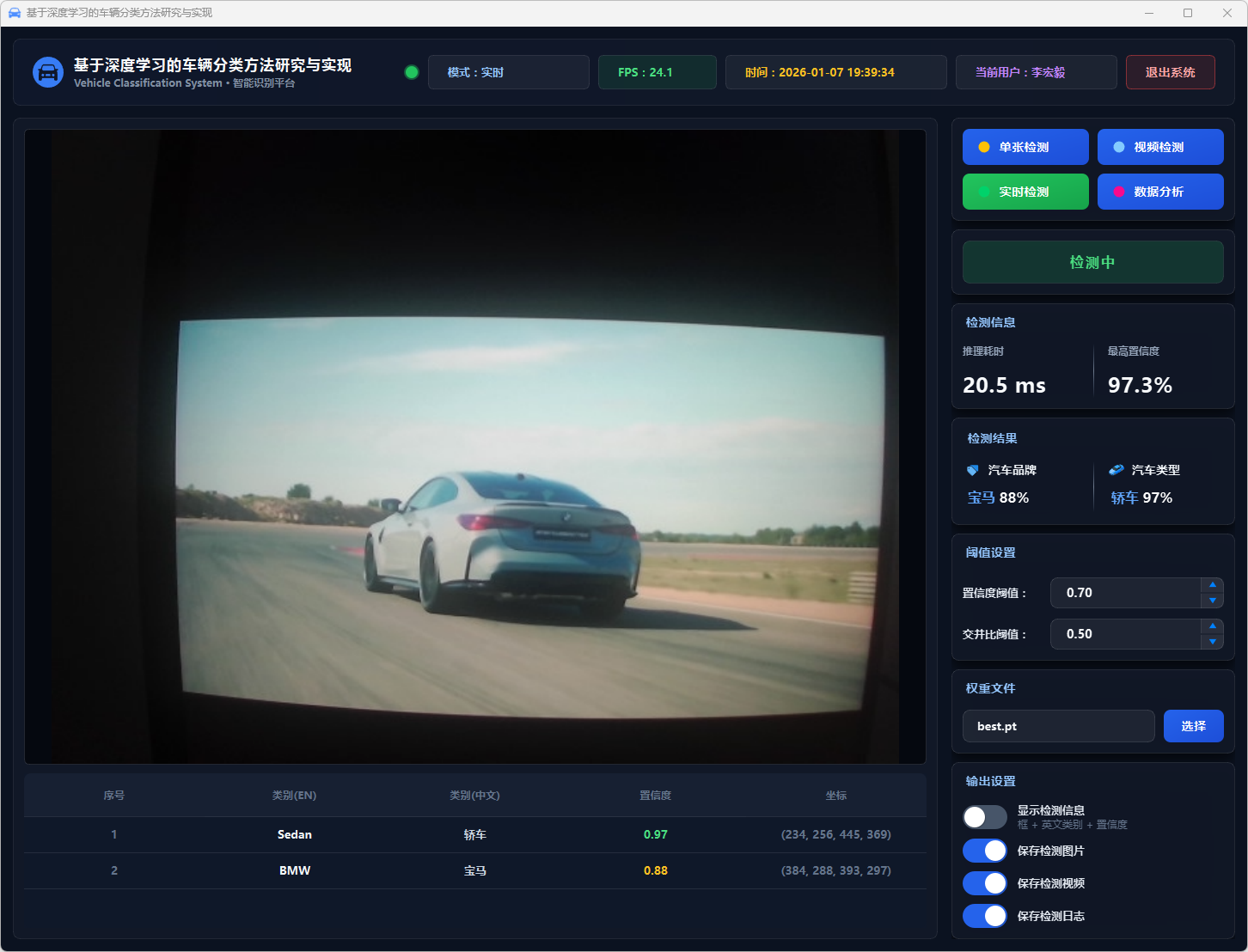
图29 实时检:宝马(轿车)

图30 实时检测:丰田(MPV)
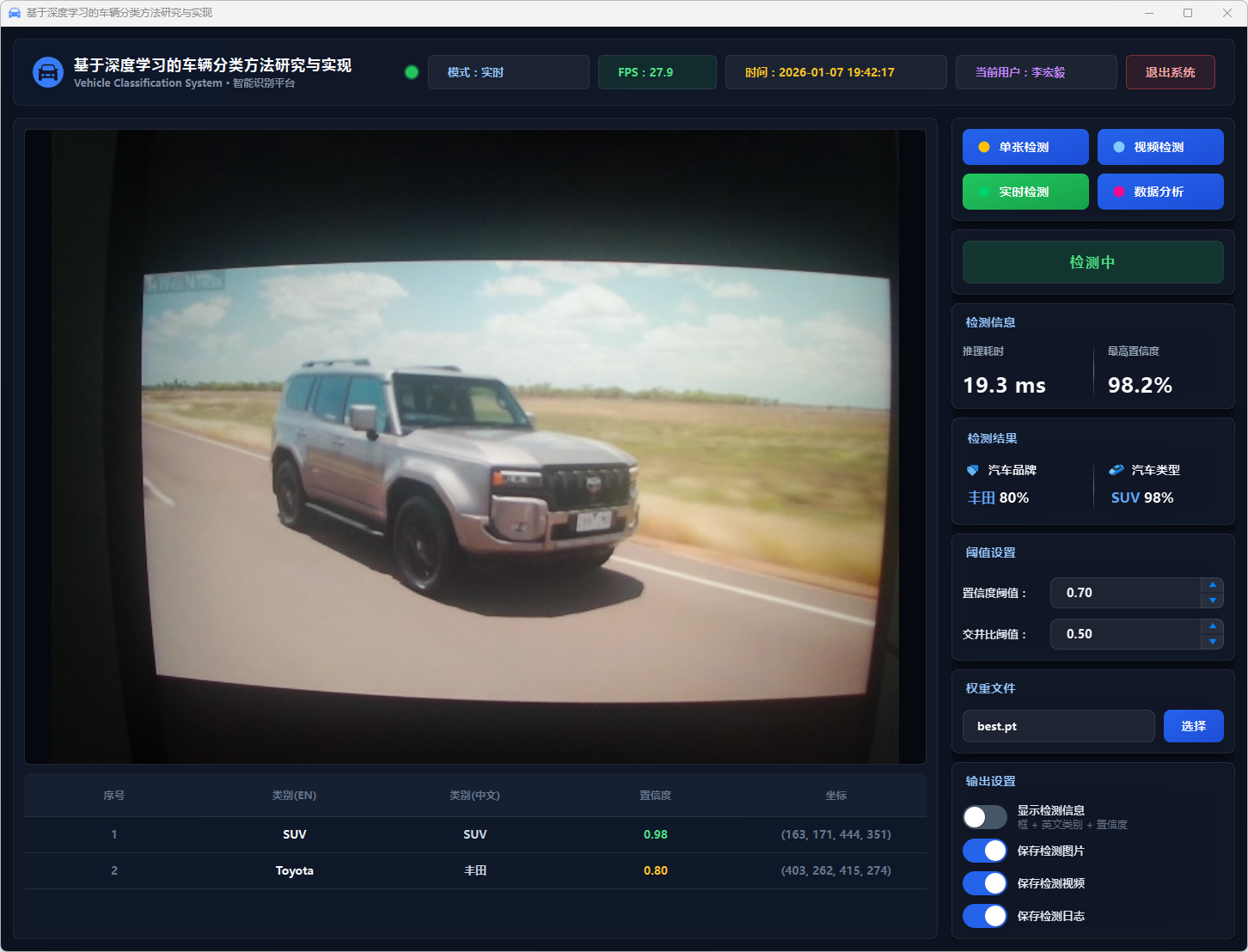
图30 实时检测:丰田(SUV)
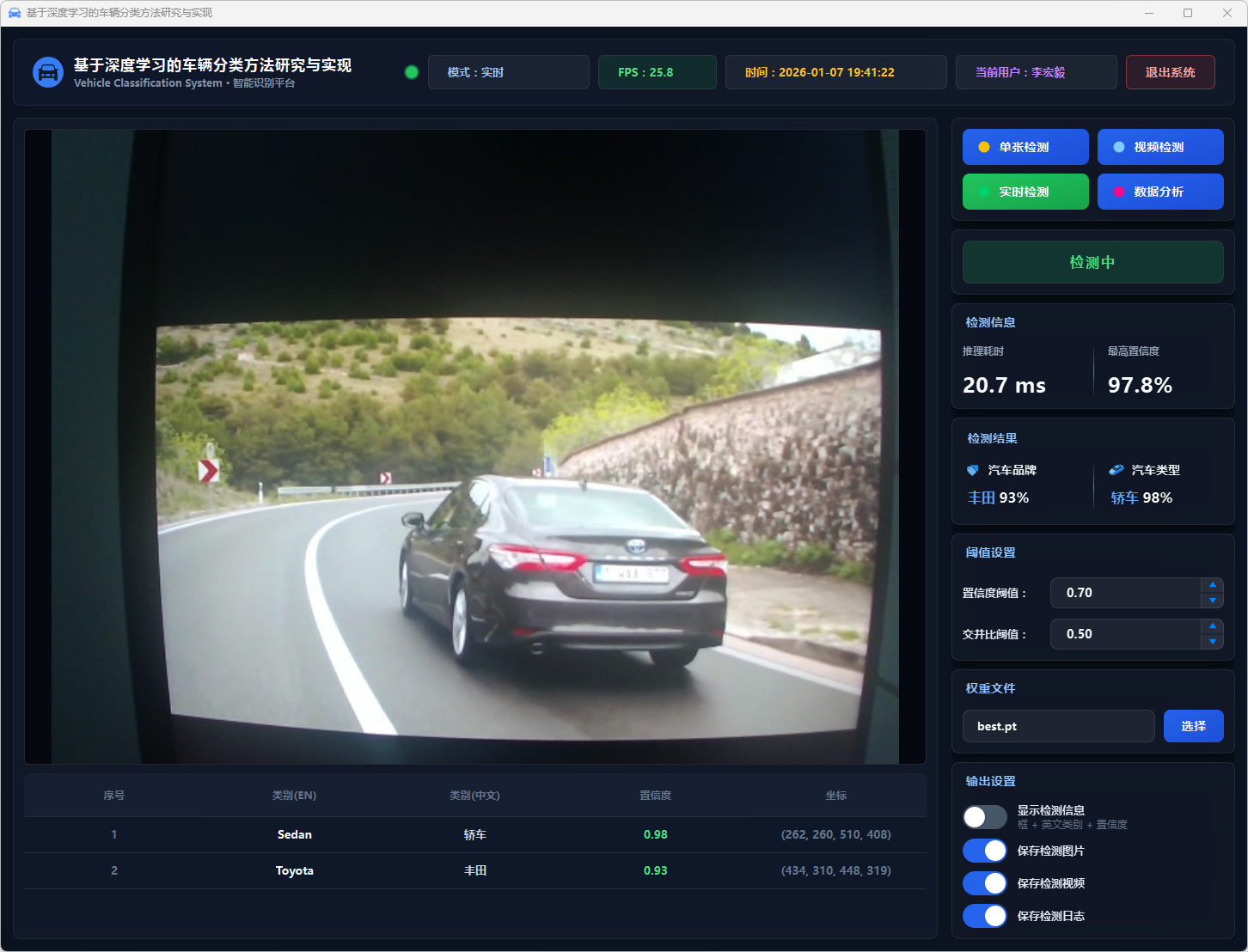
图31 实时检测:丰田(轿车)
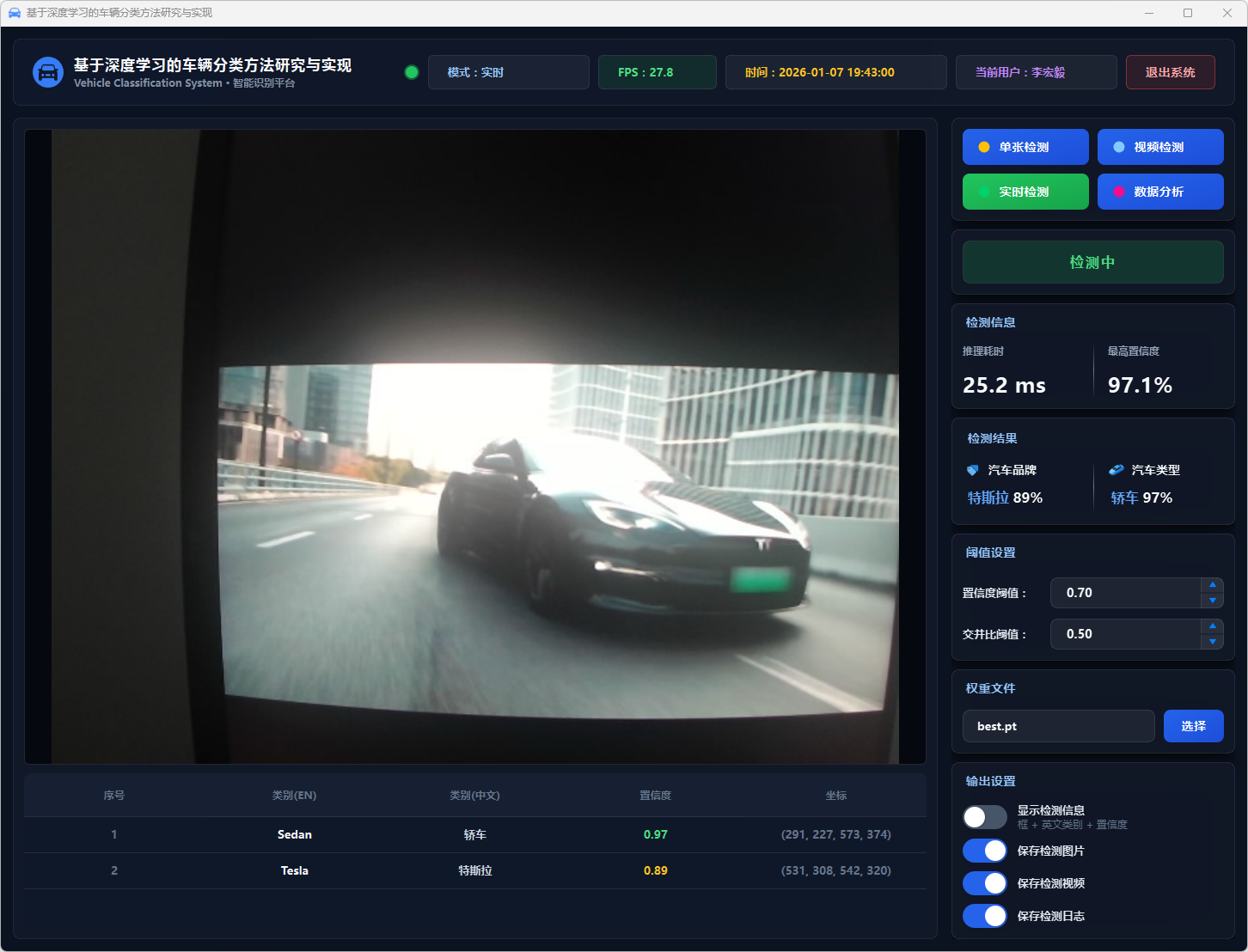
图32 实时检测:特斯拉(轿车)
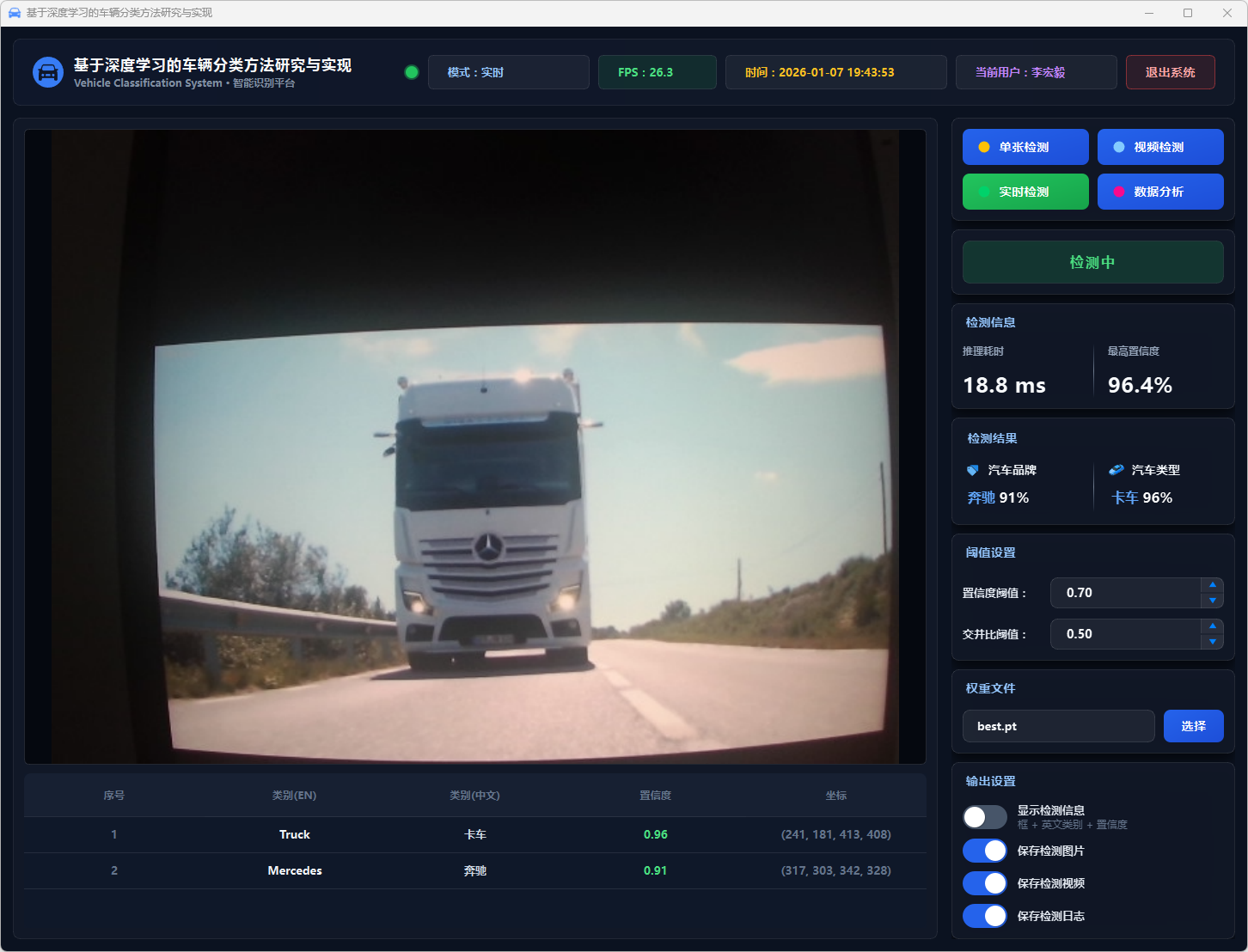
图33 实时检测:奔驰(卡车)
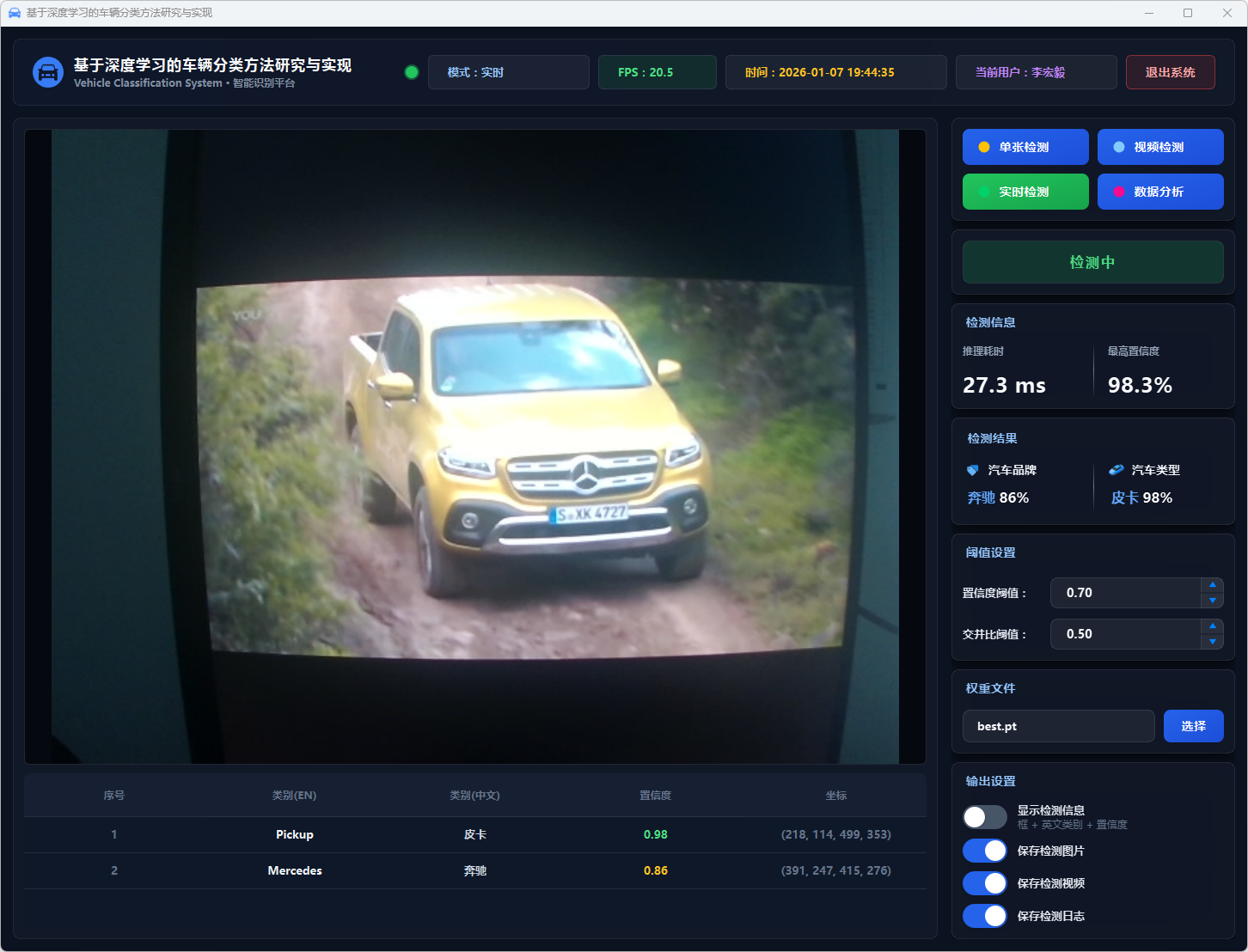
图34 实时检测:奔驰(皮卡)
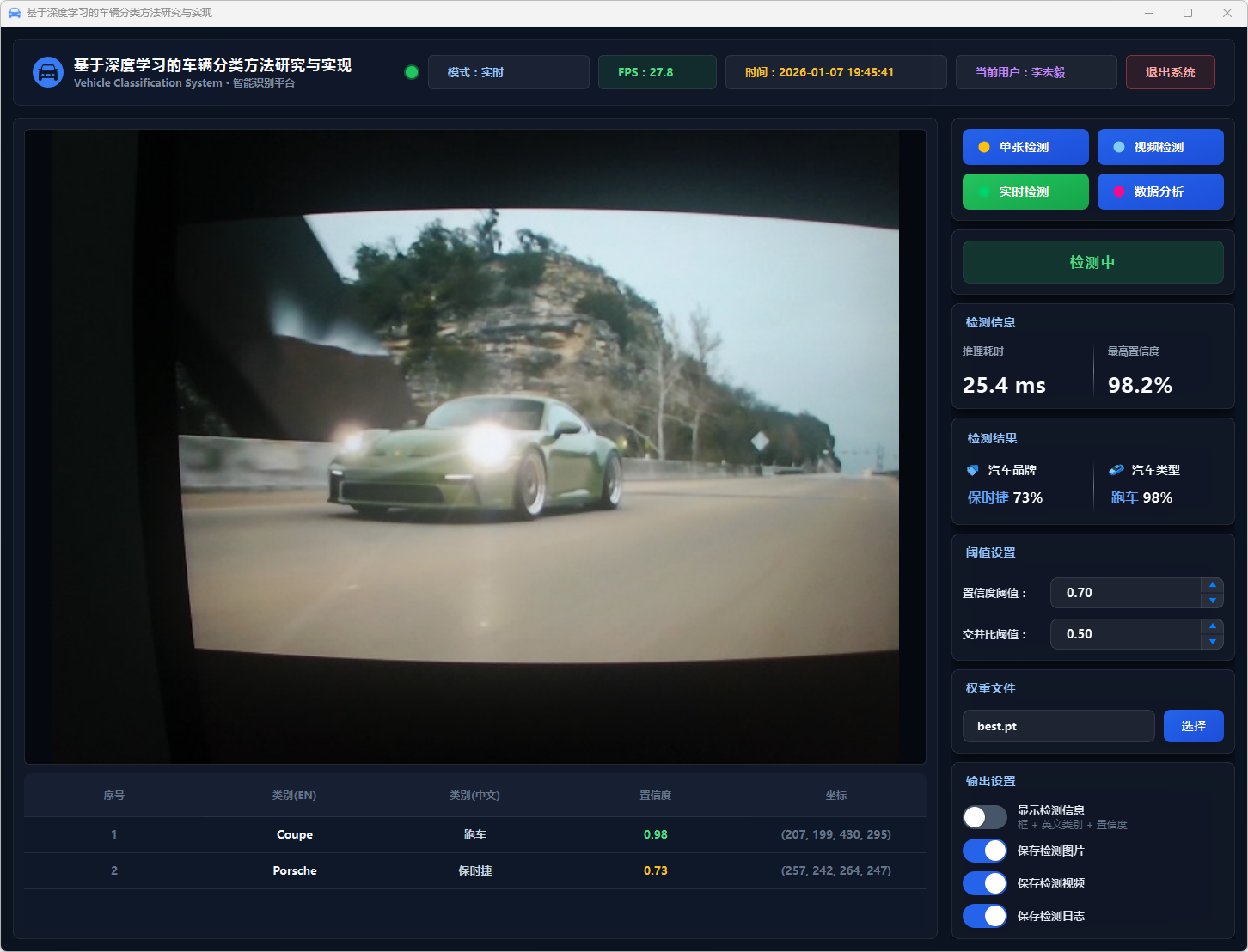
图35 实时检测:保时(跑车)
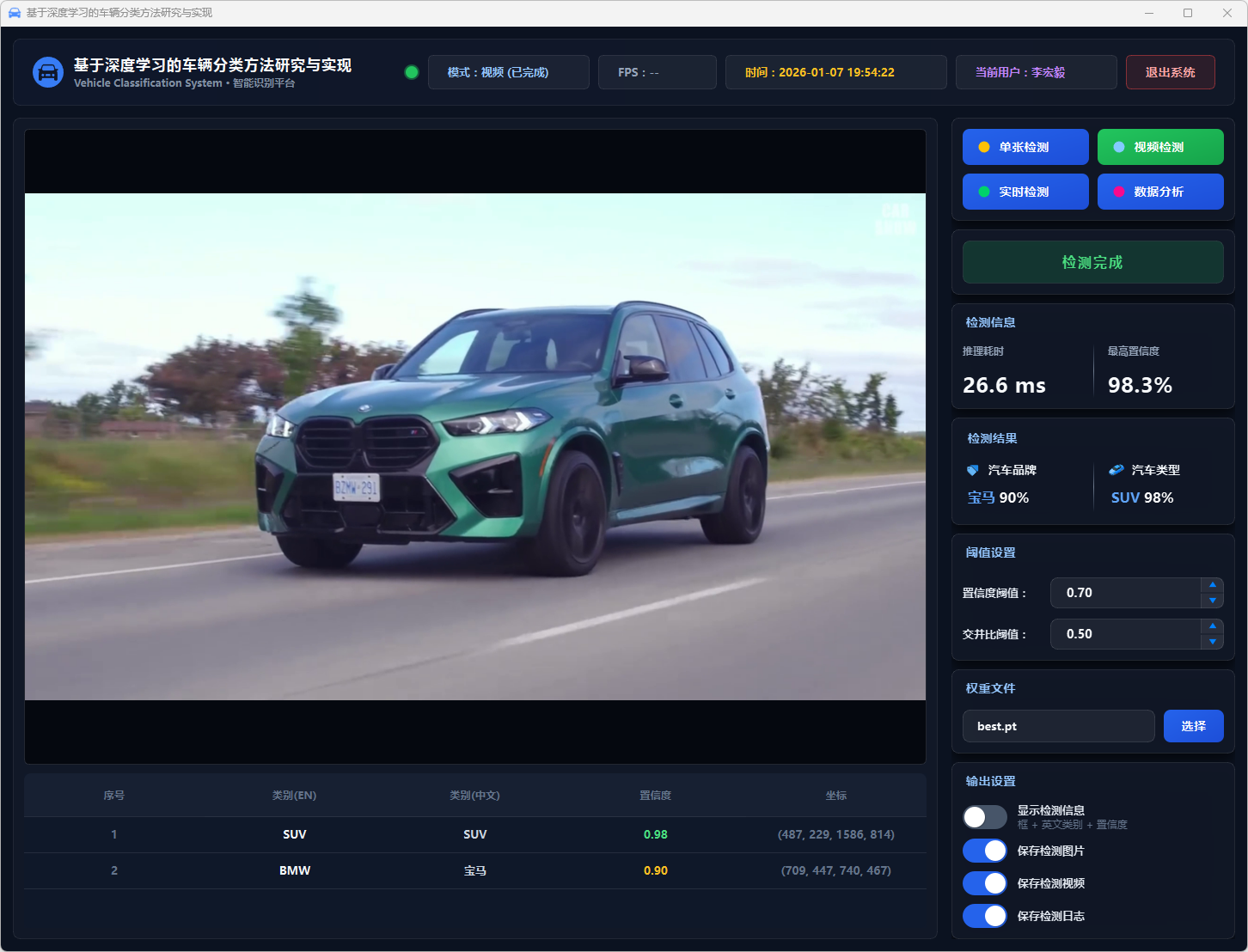
图36 视频检测:宝马(SUV)
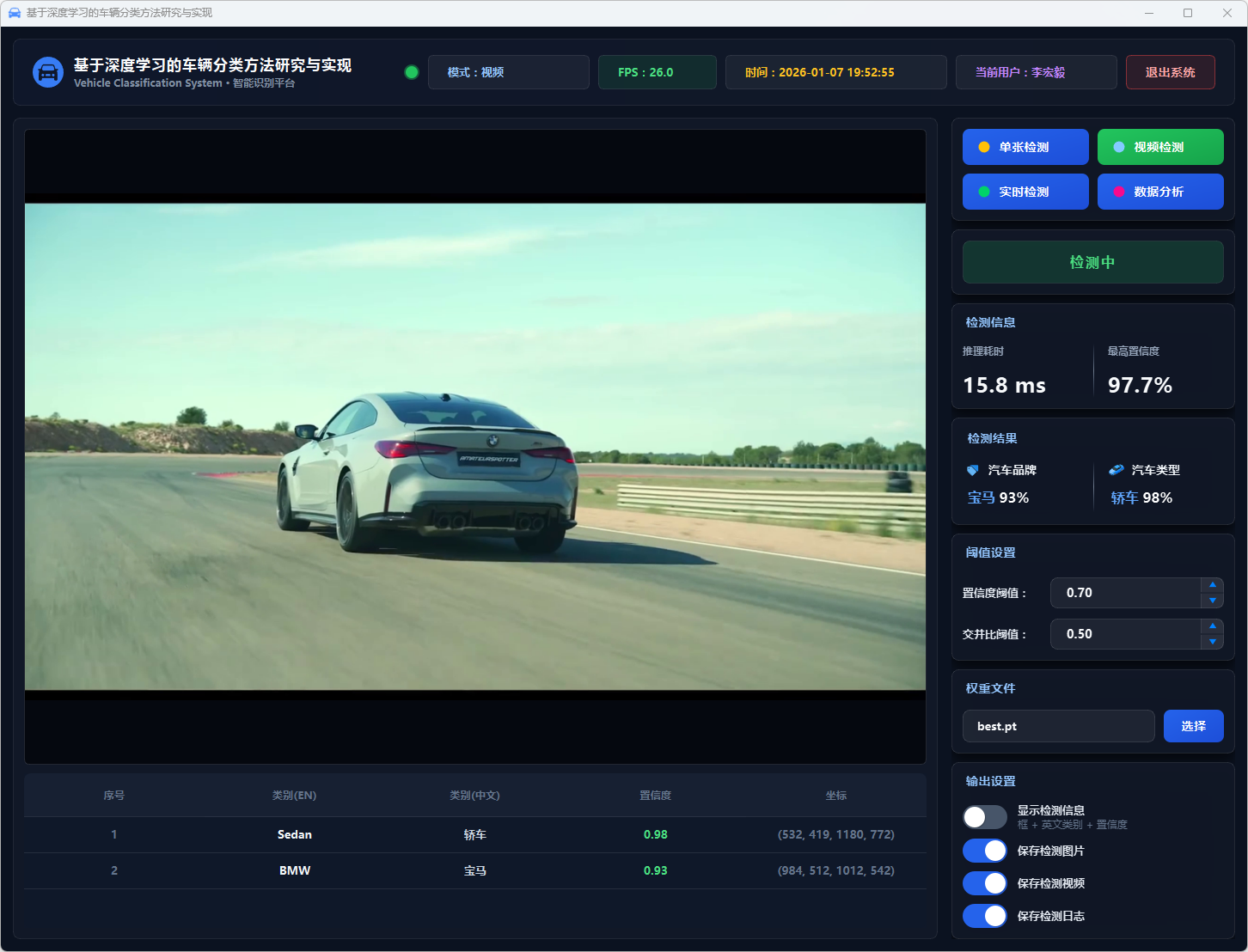
图37 视频检测:宝马(轿车)
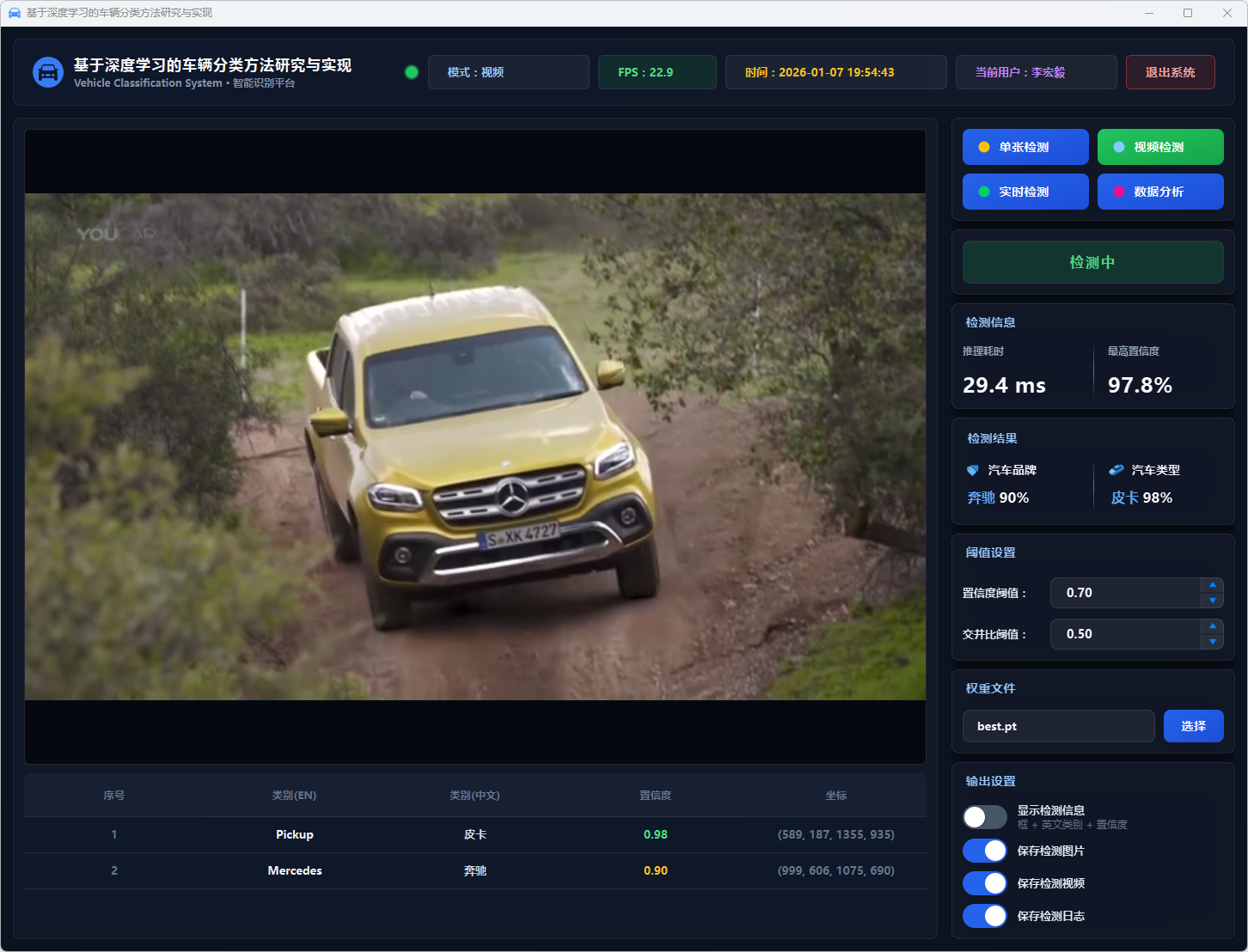
图38 视频检测:奔驰(皮卡)
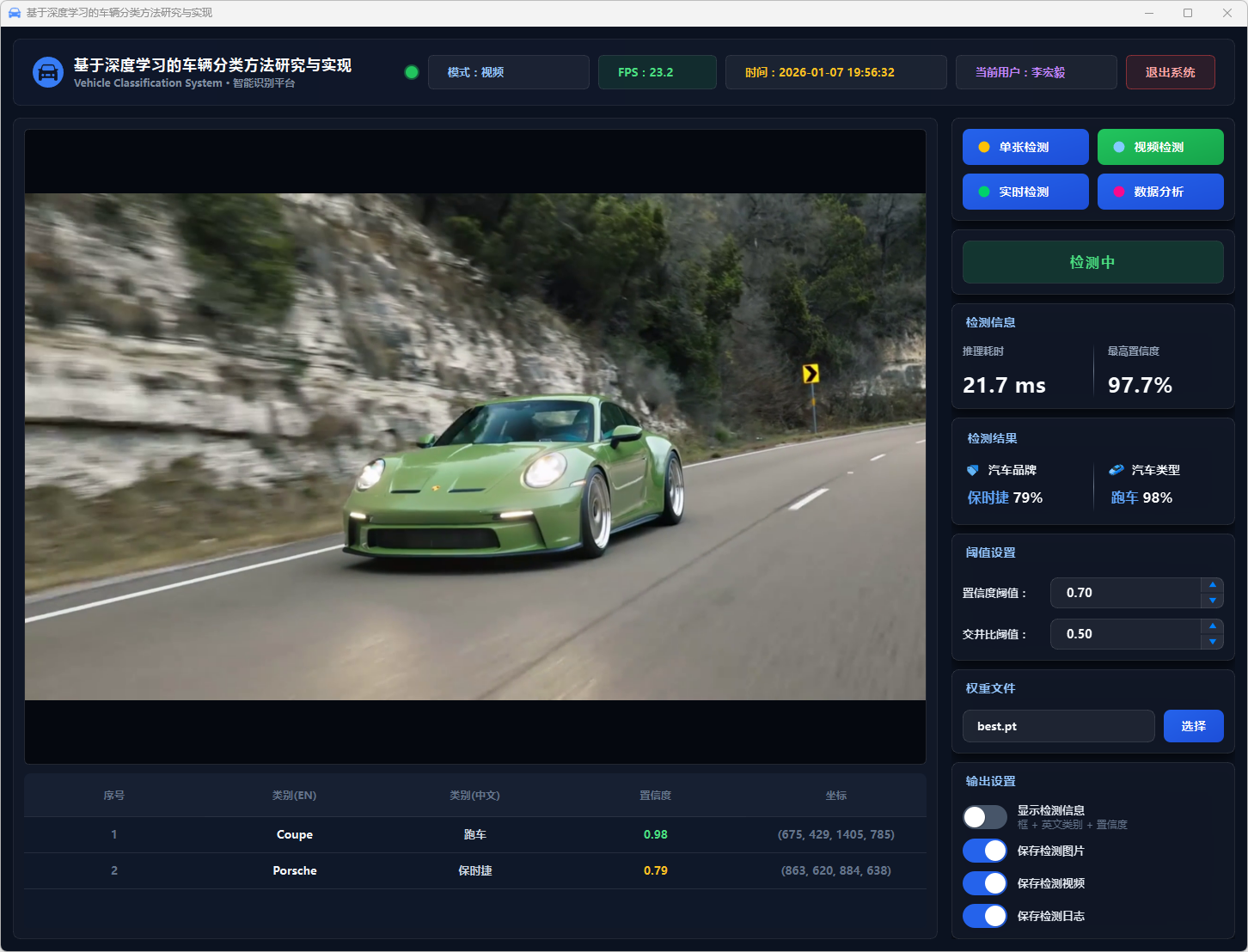
图39 视频检测:保时捷(跑车)
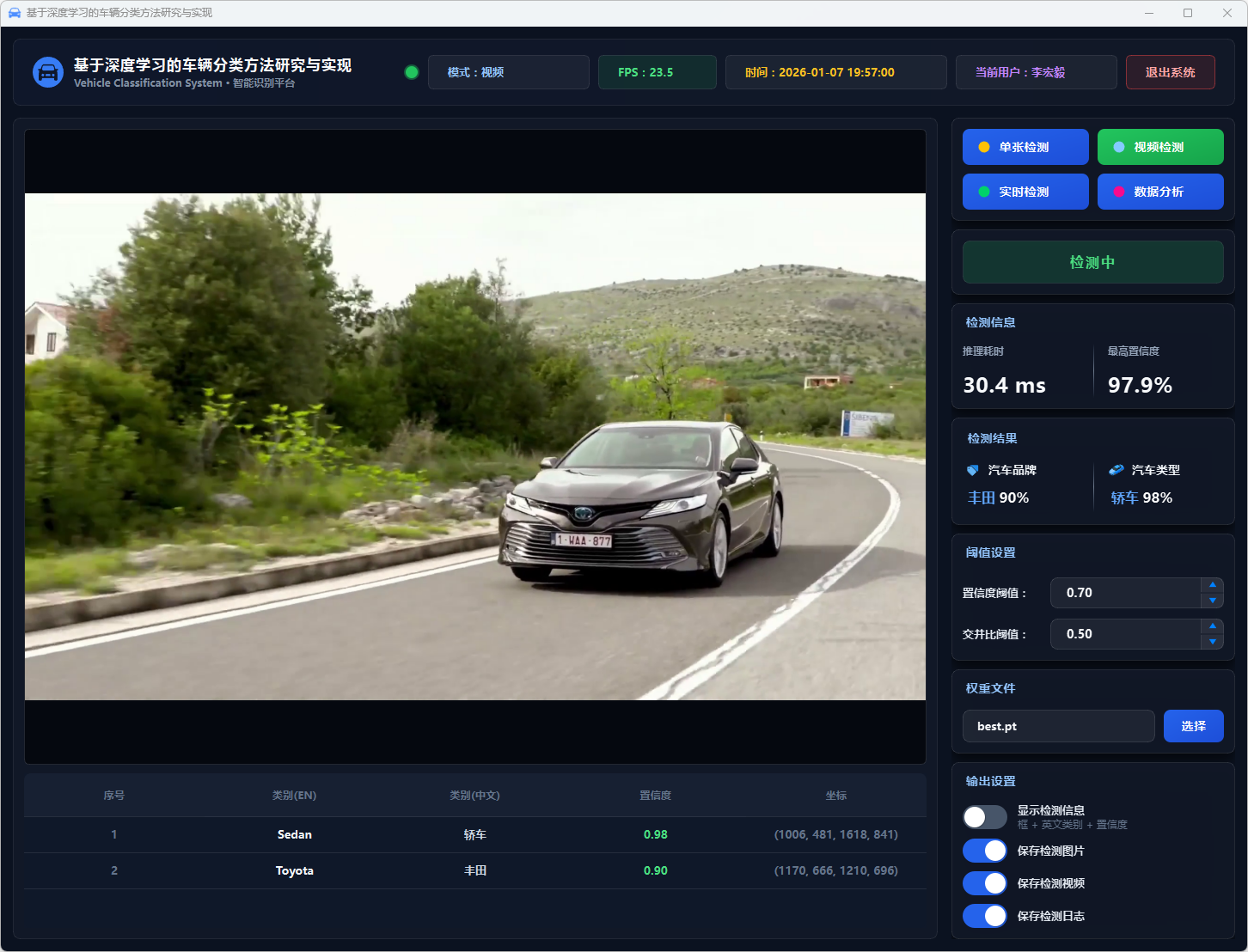
图40 视频检测:丰田(轿车)
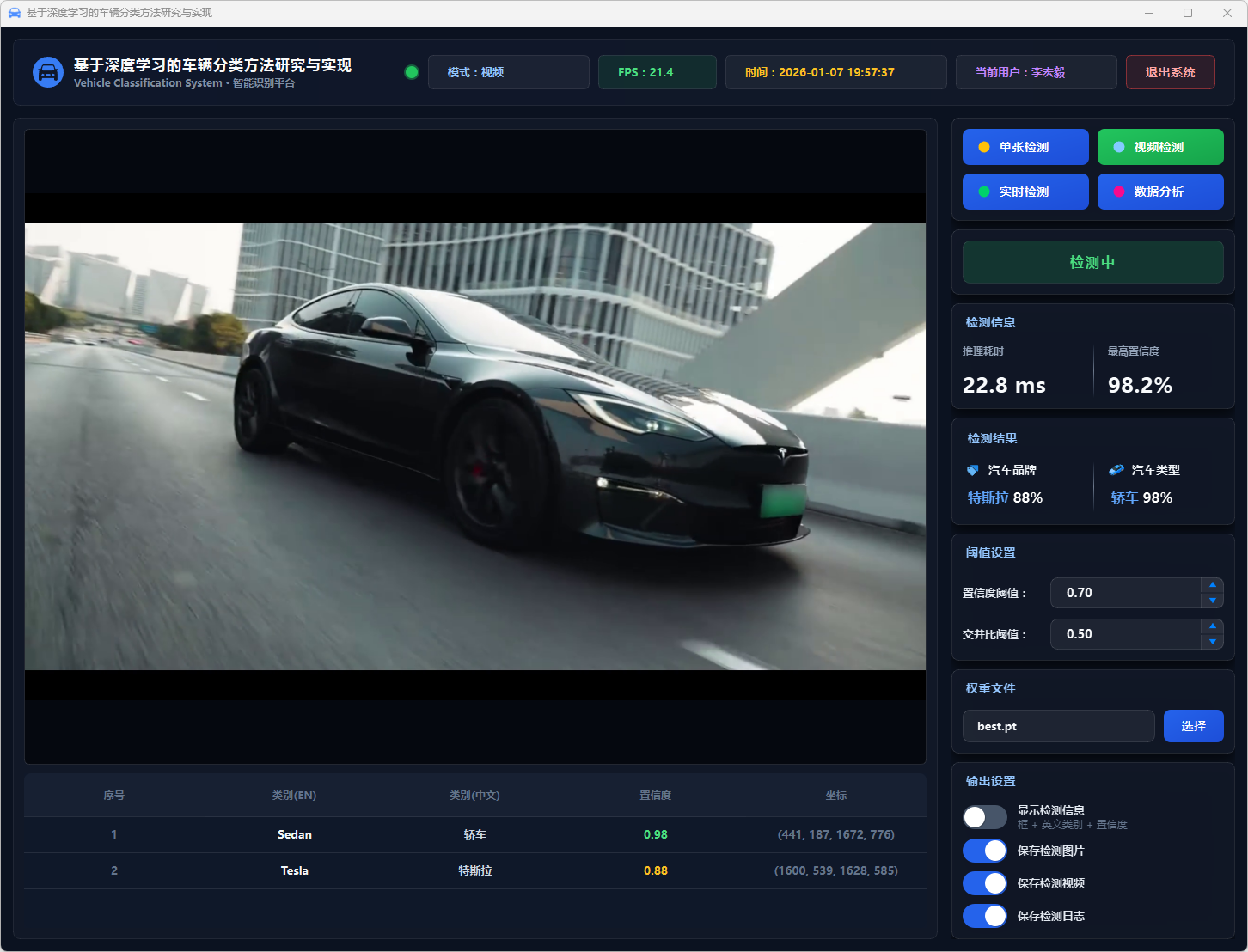
图41 视频检测:特斯拉(轿车)
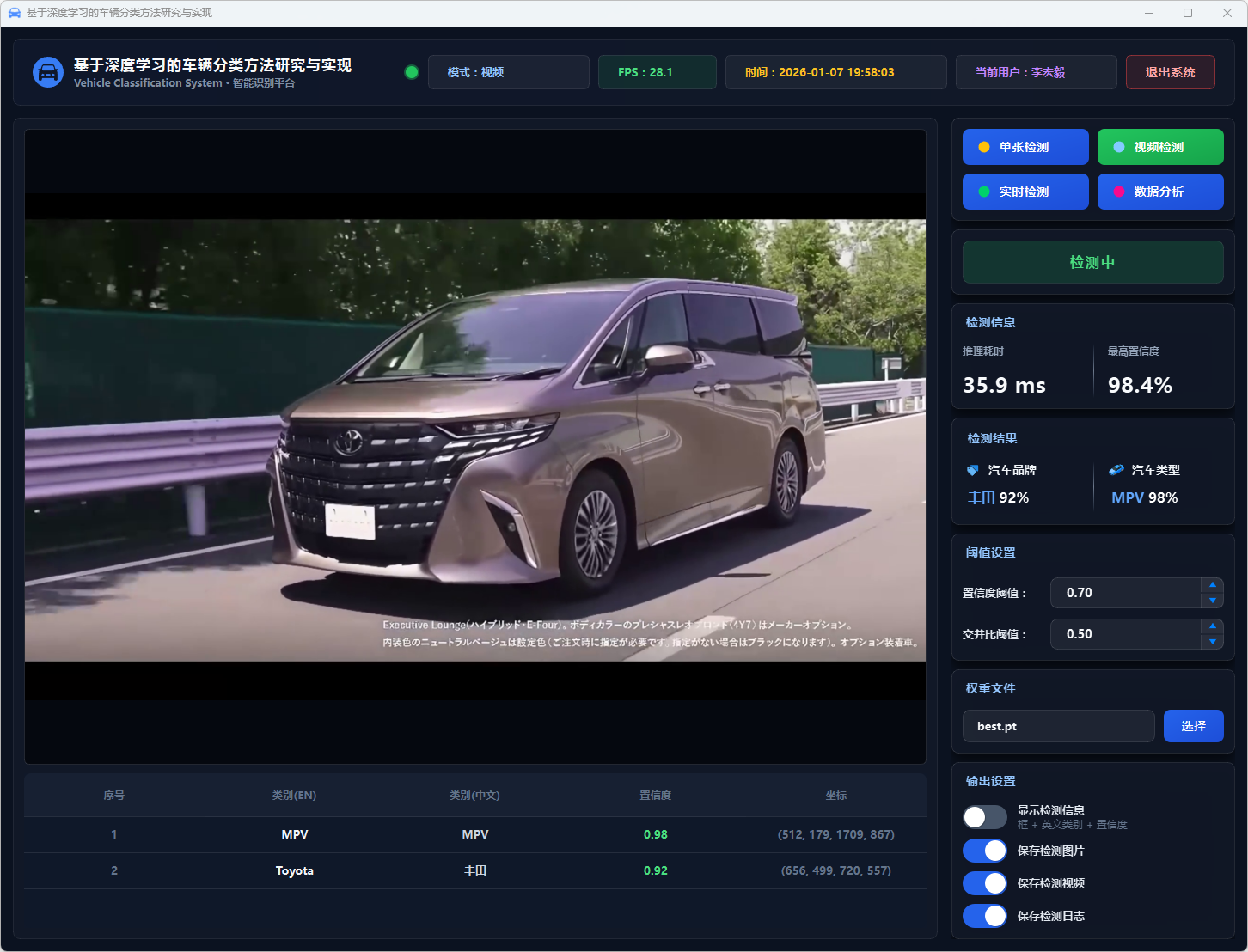
图42 视频检测:丰田(MPV)
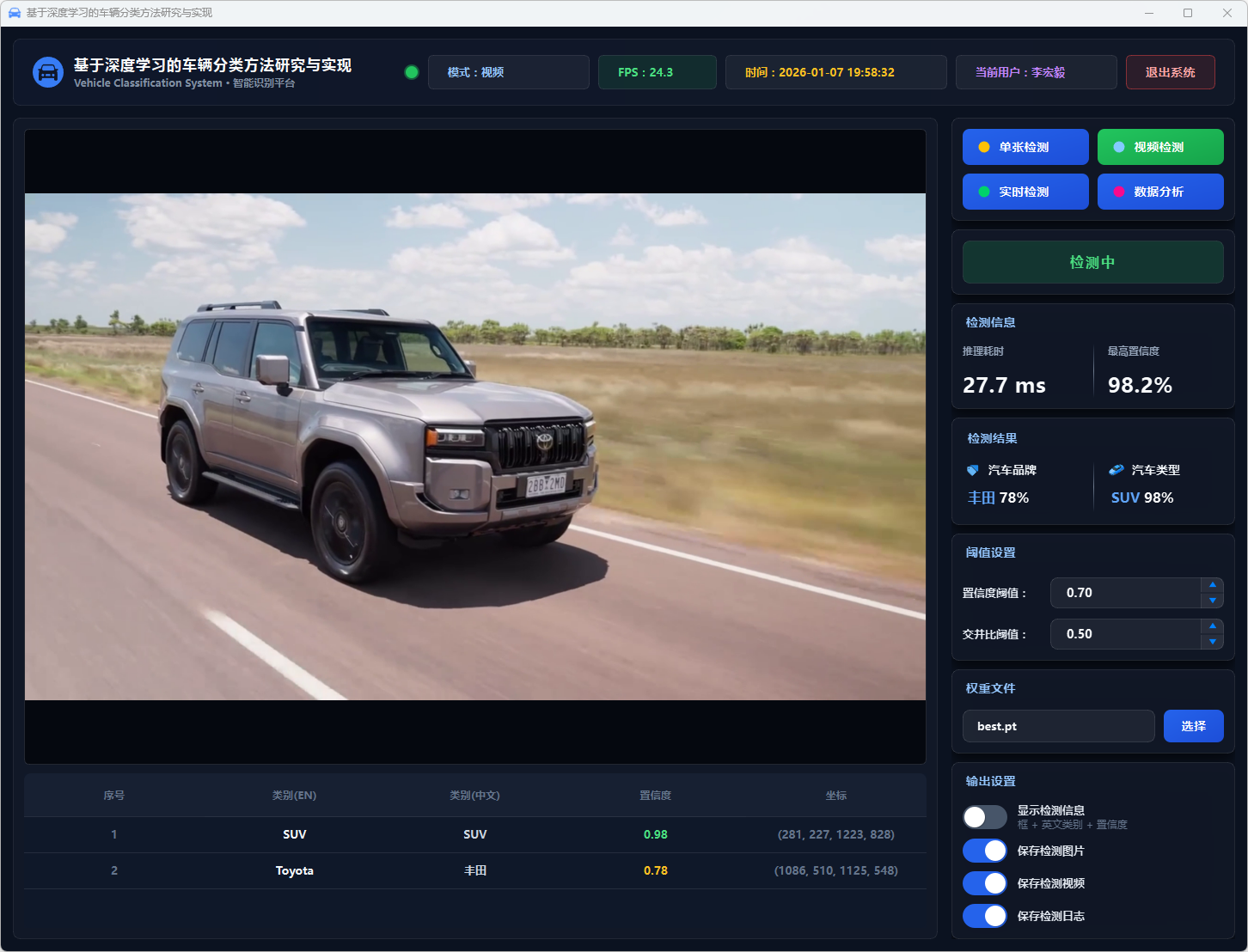
图43 视频检测:丰田(SUV)
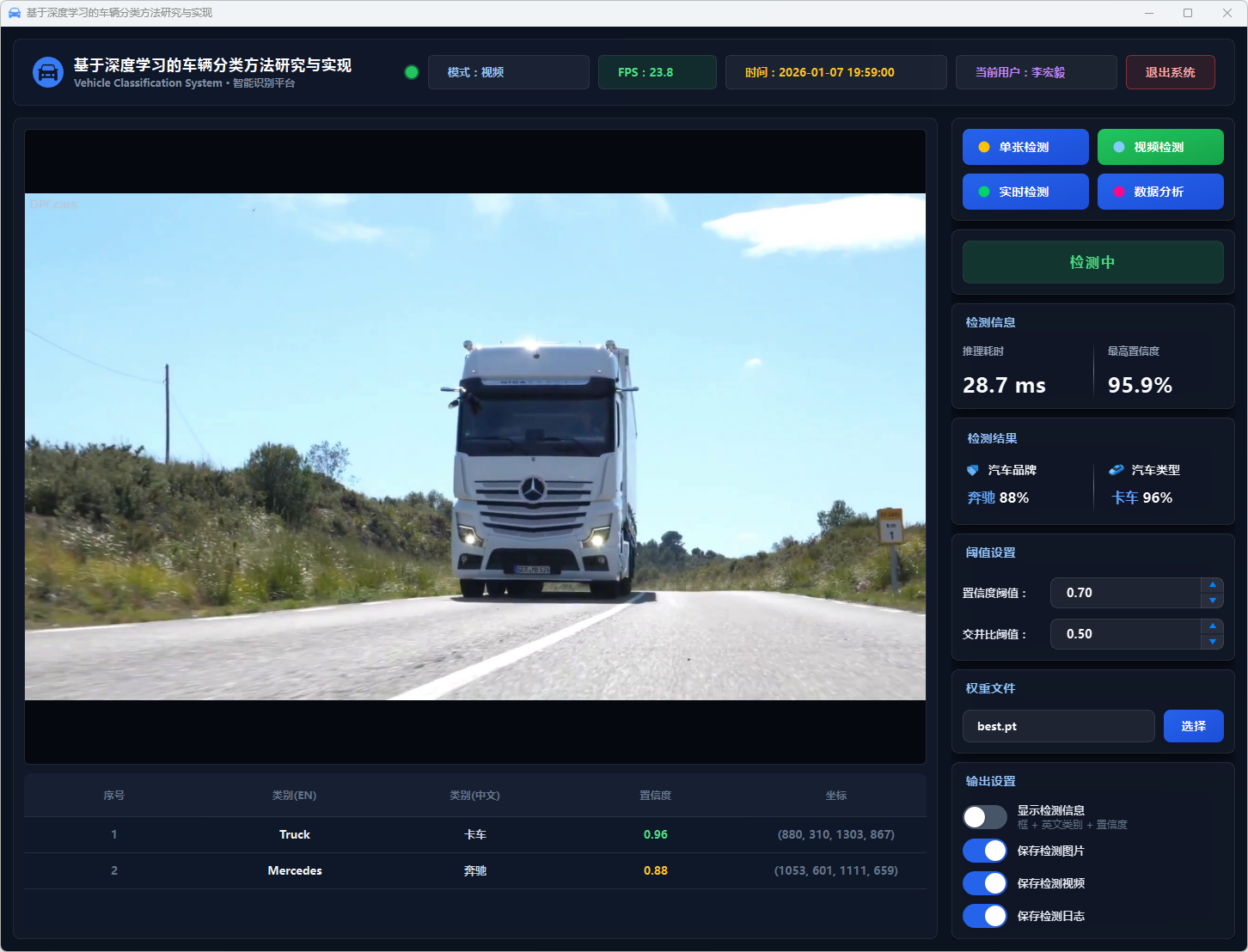
图44 视频检测:奔驰(卡车)
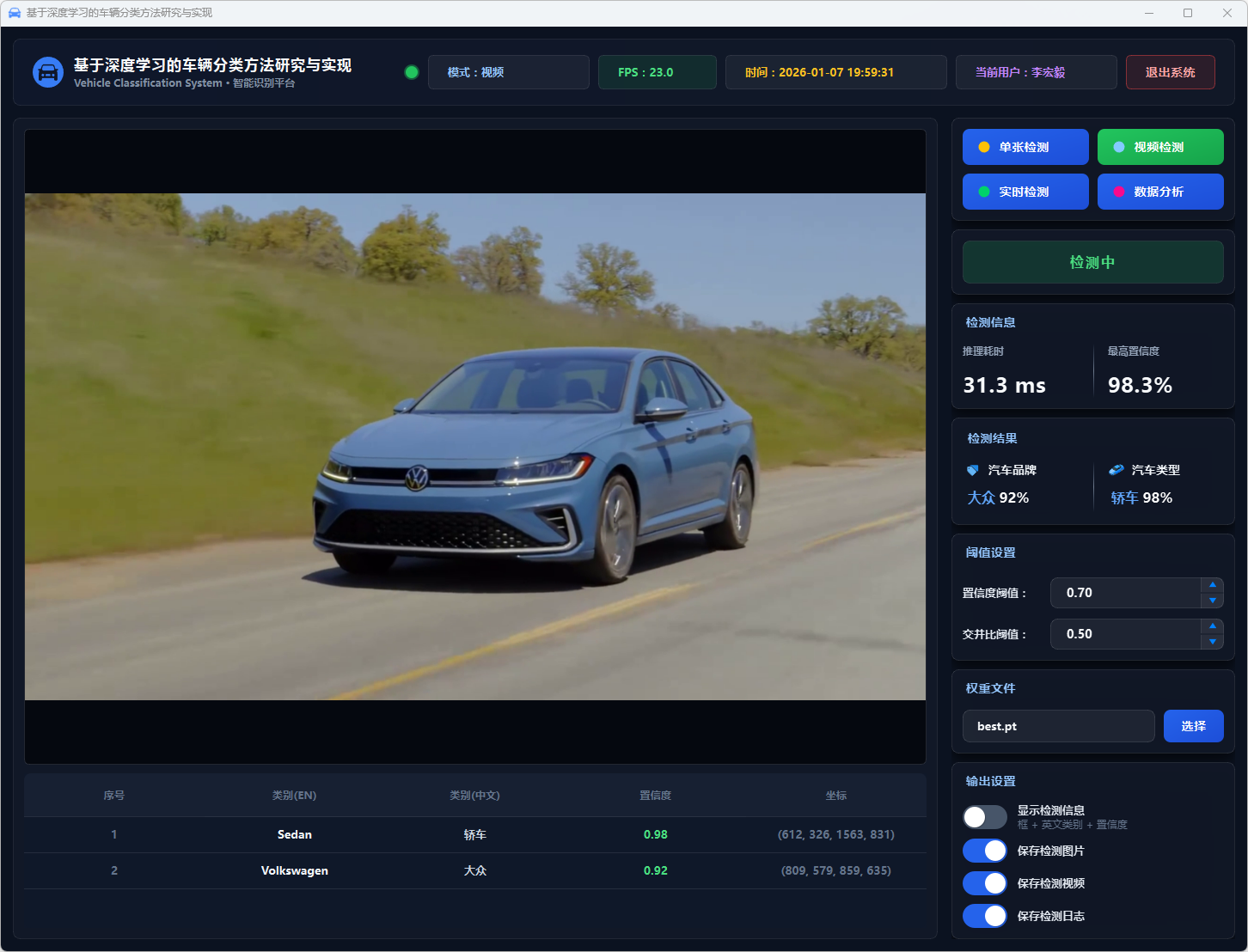
图45 视频检测:大众(轿车)
数据分析
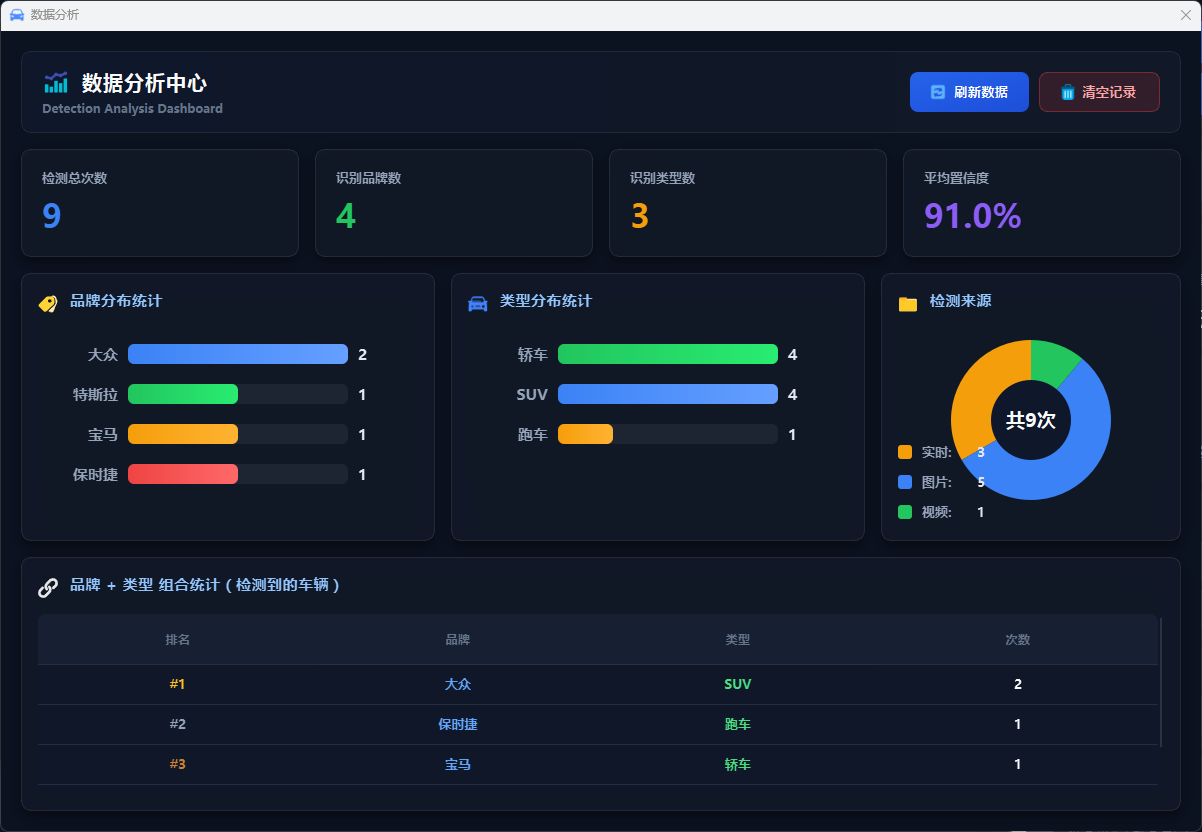
图46 数据分析
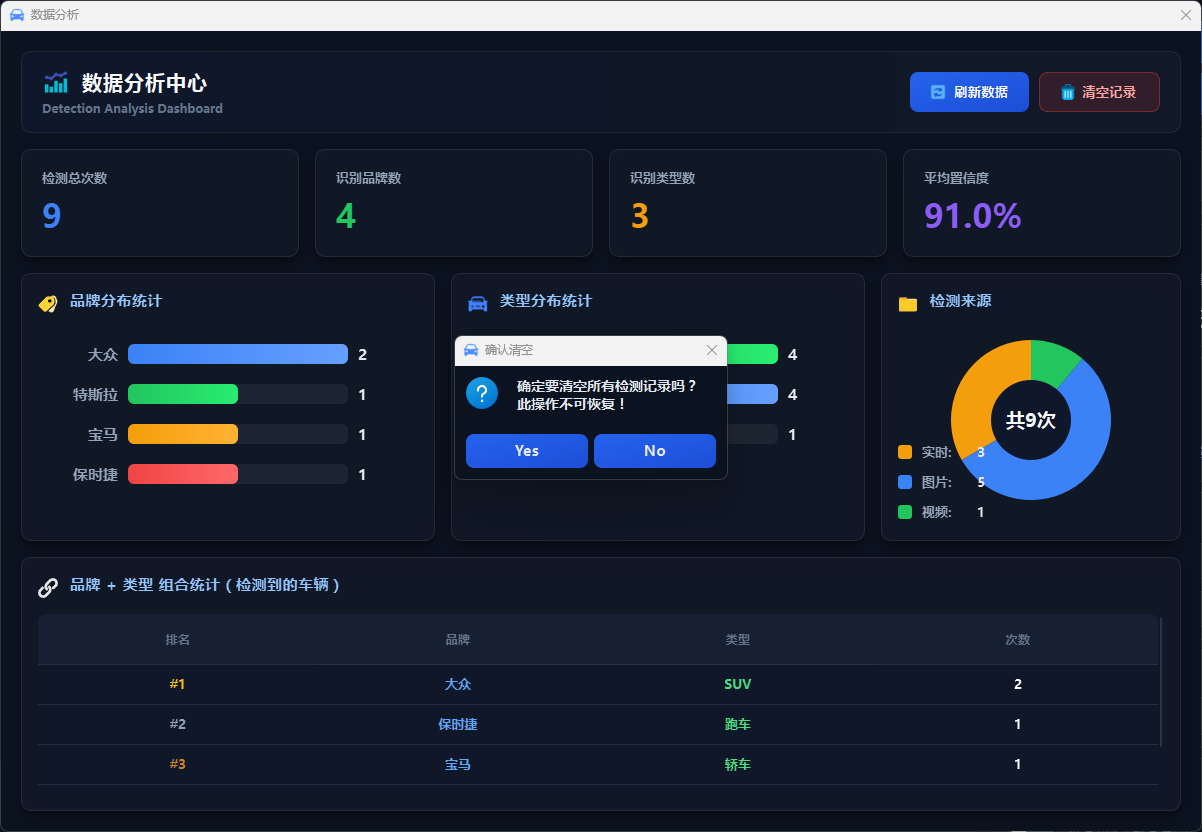
图47 数据分析:清空数据