文章目录
- 前言
- [定义概念 + 缩写](#定义概念 + 缩写)
- 性质
-
- [1. 信号源模块(输入端)](#1. 信号源模块(输入端))
- [2. 连续系统与控制模块](#2. 连续系统与控制模块)
- [3. 数学运算模块](#3. 数学运算模块)
- [4. 信号路由与重组模块](#4. 信号路由与重组模块)
- [5. 逻辑与比较模块](#5. 逻辑与比较模块)
- [6. 显示与观测模块](#6. 显示与观测模块)
- 使用步骤
-
- [步骤 1:明确系统类型](#步骤 1:明确系统类型)
- [步骤 2:从库中搜索模块](#步骤 2:从库中搜索模块)
- [步骤 3:搭建最小可运行模型](#步骤 3:搭建最小可运行模型)
- [步骤 4:逐步增加复杂度](#步骤 4:逐步增加复杂度)
- [示例(MATLAB + Simulink 思维对应)](#示例(MATLAB + Simulink 思维对应))
- 总结
前言
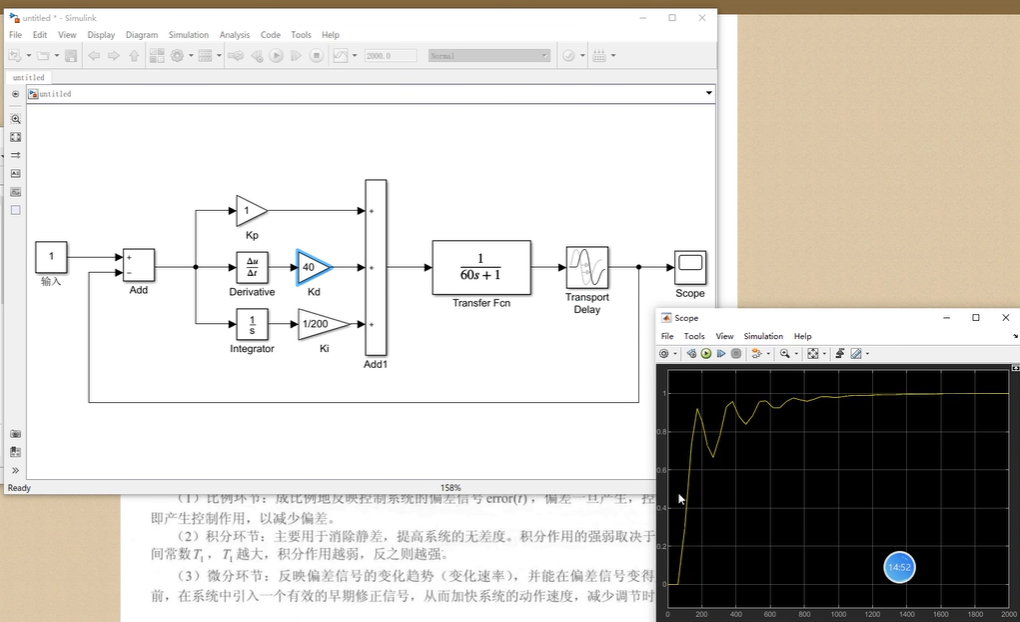
在使用 Simulink 进行自动控制、信号处理或系统建模时,最容易遇到的问题并不是"理论不会",而是不知道该用哪个模块、模块在库里的位置、以及模块之间如何组合 。
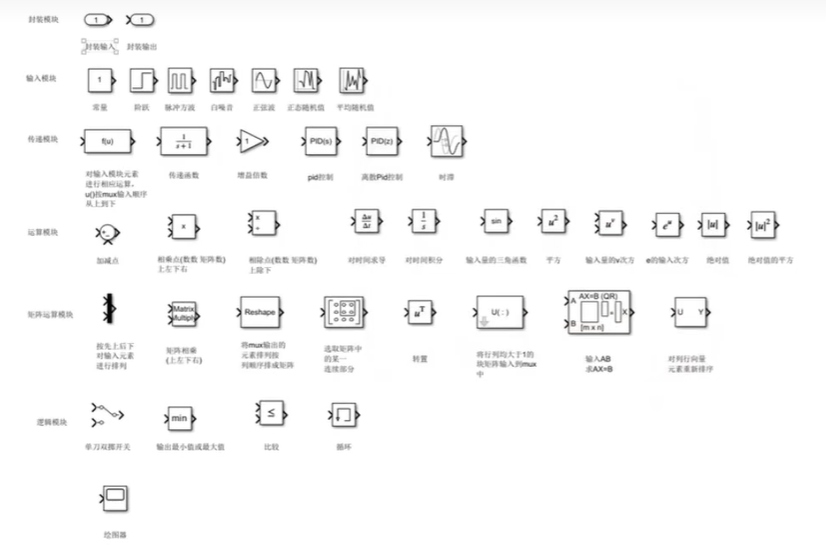
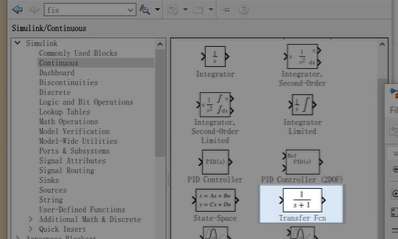
这张图【1】可以看作是一张 Simulink 常用模块的功能地图 ,涵盖了信号源、传递函数、控制器、数学运算、逻辑判断以及信号整形等核心模块。本文将基于这张图,对这些模块进行系统梳理,帮助建立一个从功能到建模的直觉映射。
定义概念 + 缩写
-
Simulink
MATLAB 提供的基于模块(Block)的系统建模与仿真工具,广泛用于
- 自动控制
- 信号与系统
- 数字信号处理
- 通信与嵌入式系统
-
Block(模块)
Simulink 中的基本功能单元,每个模块完成一个确定的数学或逻辑功能。
-
Subsystem(子系统)
用于对复杂模型进行封装与层次化管理。
-
PID
比例(P)、积分(I)、微分(D)控制器,是控制系统中最常见的控制模块。
性质
从功能上看,图中的模块可以分为以下几类:
1. 信号源模块(输入端)
用于产生系统的输入信号,常见于仿真激励:
-
常数(Constant)
-
阶跃信号(Step)
-
脉冲信号
-
正弦波(Sine Wave)
-
随机信号 / 噪声
特点:
- 通常位于模型最左侧
- 决定系统的"测试场景"
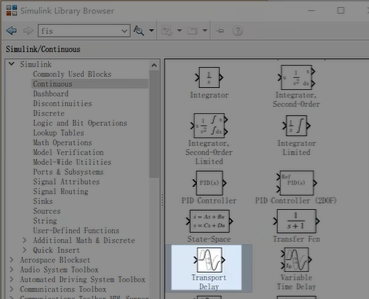
2. 连续系统与控制模块
用于描述系统动力学与控制律:
-
传递函数(Transfer Function)
-
积分器(1/s)
-
微分器
-
PID 控制器(PID(s)、离散 PID)5
特点:
- 直接对应控制理论中的数学模型
- 是自动控制建模的核心模块
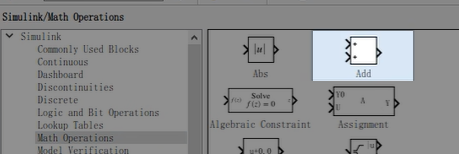
3. 数学运算模块
完成基础或非线性数学运算:
-
加法、减法、
-
乘法(增益)
-
除法
-
乘方(平方、开方)
-
三角函数(sin、cos)
-
绝对值、指数函数
特点:
- 用于构建非线性系统或中间计算过程
- 在状态方程、信号变换中非常常见
4. 信号路由与重组模块
用于整理、拆分或组合信号:
-
Mux / Demux
-
Selector
-
Reshape
-
Matrix Multiply
-
Transprot Delay 传递延迟
-
Transfer Function 传递函数
特点:
- 不改变信号本身的物理意义
- 只改变信号的"组织方式"
- 在状态空间、多输入多输出系统中非常重要
5. 逻辑与比较模块
用于条件判断和逻辑控制:
- 比较器(>、<、=)
- Min / Max
- Switch
- 逻辑运算(AND / OR)
特点:
- 常用于控制切换、饱和限制、保护逻辑
- 在工程模型中不可或缺
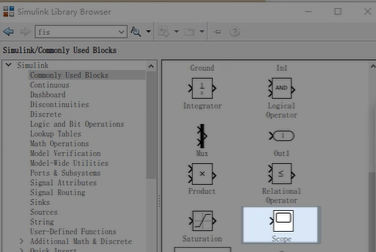
6. 显示与观测模块
用于结果观察:
-
Scope 示波器
-
Display
-
运行与观测长度
特点:
- 通常放在模型最右侧
- 用于验证系统动态性能
使用步骤
下面给出一个**从"看到模块 → 能搭系统"**的通用使用流程。
步骤 1:明确系统类型
- 控制系统 → 重点关注 传递函数 / PID / 积分器
- 信号处理 → 重点关注 信号源 / 数学运算 / FFT / 滤波
- 状态空间 → 重点关注 Mux / Matrix / Integrator
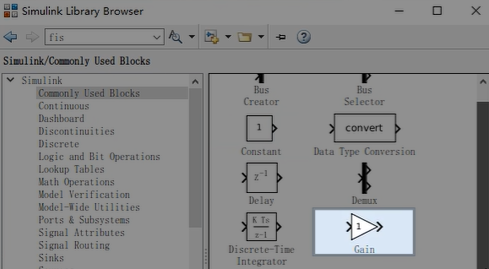
步骤 2:从库中搜索模块
推荐做法:
- 直接在 Simulink Library Browser 搜索英文关键词
transferpidsummuxscope
步骤 3:搭建最小可运行模型
最基本结构通常为:
yaml
信号源 → 系统模块 →(可选)控制器 → Scope步骤 4:逐步增加复杂度
- 先跑通
- 再加反馈
- 最后加非线性、逻辑判断、噪声等
示例(MATLAB + Simulink 思维对应)
matlab
% 连续系统传递函数
G = tf(1, [1 2 1]);
% 闭环系统
sys_cl = feedback(G, 1);
step(sys_cl)在 Simulink 中,上述代码对应的模块组合就是:
Transfer Function
Sum(负反馈)
Scope
总结
看到 PID → 想到控制律
看到 Integrator → 想到状态变量
看到 Mux → 想到状态向量
那么从理论到 Simulink 建模的距离,就已经被大幅缩短了。
参考文献
1 https://www.bilibili.com/video/BV1rK4y1i714
2 自动控制原理(胡寿松)
3 信号与系统(Oppenheim)
4 MATLAB & Simulink 官方文档