在讨论自动驾驶系统时,一个常见的误解是把"开车能力"等同于"驾驶智能"。事实上,人类驾驶与端到端自动驾驶之间的核心差异,并不在于动作精度或感知能力,而在于认知结构与任务管理模式。
一、人类驾驶:动态任务管理的认知闭环
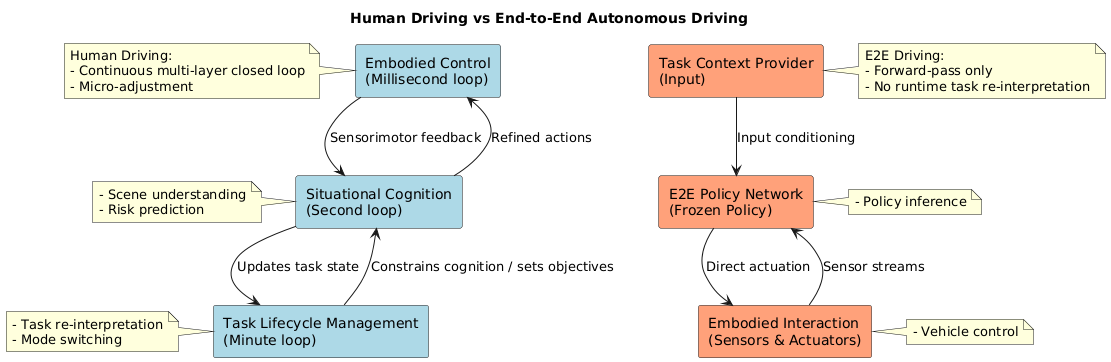
人类驾驶并非一个单一的动作序列,而是一系列嵌套任务生命周期的持续执行和调整。
例如在高速公路上驾驶时,驾驶员可能同时运行三个层级的认知闭环:
-
具身控制闭环(无意识):方向盘微调、油门刹车控制等快速反馈。
-
情境认知闭环(半意识):识别前方潜在风险,预测其他车辆行为,微调驾驶策略。
-
任务管理闭环(显意识):在检测到施工、交通拥堵或异常天气时,主动切换驾驶模式或改变驾驶目标。
这种结构保证了驾驶员能够在行动过程中持续评估自己正在执行的任务,并根据环境变化重解释任务本身 。也就是说,人类驾驶者不仅"会开车",更知道自己现在在做什么,以及什么时候需要改变做法。
二、端到端自动驾驶:高度熟练但不可反思
端到端自动驾驶系统通常以感知序列直接映射到动作输出的策略网络为核心。其运行期的流程大致是:
传感器数据 → 已训练好的策略网络 → 动作输出与人类不同:
-
端到端系统不具备在线重解释任务的能力。
-
所有对异常环境的认知闭环都被固化在训练阶段或外部规则中。
-
运行期仅执行前向映射,不会主动判断自己是否仍在执行原任务。
结果是,端到端系统在面对未训练分布或复杂异常时,往往等到动作失效或偏离目标才暴露问题。
三、对比分析
| 维度 | 人类驾驶 | 端到端自动驾驶 |
|---|---|---|
| 驾驶是否是单一任务 | ❌(动态任务生命周期) | ✅(固定策略映射) |
| 任务是否可被重解释 | ✅(在线评估) | ❌(训练前固化) |
| 对异常的反应 | 先意识到,再调整 | 等到动作失效才体现 |
| 驾驶模式切换 | 内生认知行为 | 外部触发或硬编码 |
| 失败前的缓冲区 | 大 | 小 |
这揭示了一个关键事实:端到端自动驾驶虽然在特定条件下能高效执行动作,但无法实现人类式的持续任务理解和主动策略调整。
四、技术哲学视角的洞见
从工程和认知科学角度看:
驾驶的智能不仅是动作精度,更是"我知道自己在做什么"的能力。
端到端技术在运行期通过固定策略执行任务,牺牲了任务重解释能力;而人类驾驶者则不断在任务生命周期中运行认知闭环,确保行动与目标对齐,并能够预判和调整策略。
因此,端到端自动驾驶更像:
"高度熟练但永远不会反思的老司机"。
它可能不会犯低级操作错误,但缺乏主动判断任务状态和调整策略的能力。
五、结论
端到端技术与人类驾驶模式的差异,并非技术水平问题,而是认知结构与任务管理范式的根本不同:
-
人类驾驶: 任务驱动、闭环在线、可重解释。
-
端到端驾驶: 训练驱动、闭环离线、任务固定。
理解这一点,有助于我们在评估自动驾驶能力时,不仅关注感知与动作精度,还要关注任务理解与认知闭环能力的设计空间。