一、产品描述
1.1、概述
TLE5012B是一款360°角度传感器,用于检测磁场的方向。该传感器通过单片集成的巨磁阻(iGMR)元件测量磁场的正弦和余弦角度分量,然后在内部对这些原始信号(正弦和余弦)进行数字处理,以计算磁场(磁铁)的角度方向。
TLE5012B是一款预校准的传感器,其校准参数存储在激光熔丝中。在启动时,熔丝的值被写入触发器,这些值可以被修改为特定应用的参数。 通过启用可选的内部自动校准算法,可以在较宽的温度范围和较长的使用寿命内提高角度测量的精度。
数据通信通过双向同步串行通信(SSC)实现,该通信方式与SPI兼容。传感器的配置存储在寄存器中,可通过SSC接口访问。此外,TLE5012B还提供四种其他接口:脉冲宽度调制(PWM)协议、短脉冲宽度编码(SPC)协议、霍尔开关模式(HSM)和增量接口(IIF)。 这些接口可以与SSC并行使用,也可以单独使用。此外,还提供预配置的传感器变体,具有不同的接口设置。
为了确保可靠运行,TLE5012B提供了在线诊断功能。
1.2、特性
**1.基于巨磁阻(GMR)原理:**通过改变外部磁场的方向和强度。可以控制铁磁层的磁化方向,进而实现电阻的显著变化。
2.集成磁场检测用于角度测量
3.360°角度测量,带转速计数器和角度速度测量
4.两个独立的高精度单比特主次逼近型模数转换器(SD-ADC)
5.输出端的绝对角度值以15位表示(分辨率为0.01°)
6.接口上正弦/余弦值以16位表示
7.在启用自动校准的情况下,整个使用寿命和温度范围内最大角度误差为1.0°
8.双向同步串口通信接口,典型速率为8Mbit/s
9.支持通过诊断功能和状态信息实现安全完整性等级(SIL)
10.接口:SSC、PWM、增量接口(IIF)、霍尔开关模式(HSM)、短脉冲宽度编码(SPC)
11.输出引脚可以配置为推挽或开漏
12.在开漏配置下,多个传感器可以通过SSC或SPC接口在一条线上以总线模式运行
1.3、实际应用
电控电机、旋转开关、转向角度测量、通用角度测量
二、功能描述
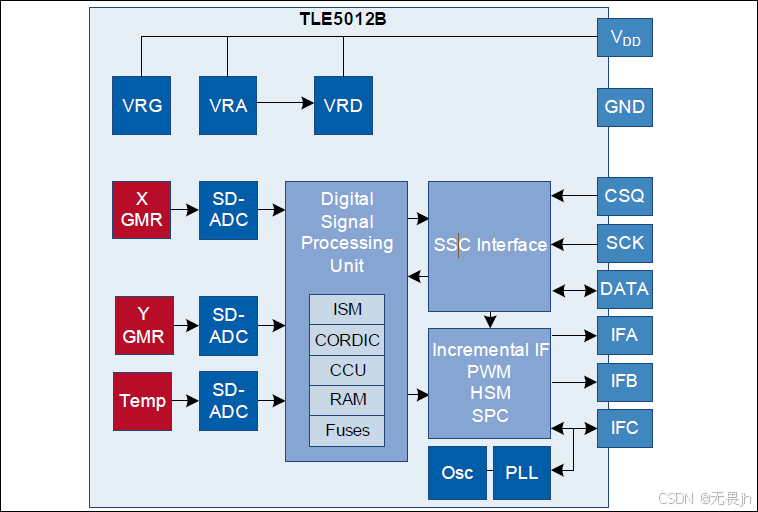
2.1、内部电源
巨磁阻电压稳压器(VRG)、模拟电压稳压器(VRA)、数字电压稳压器(VRD,由VRA派生),这些稳压器直接连接到电源VDD。
2.2、振荡器和锁相环
TLE5012B的数字时钟由锁相环(PLL)提供,默认情况下,PLL由内部振荡器供电。 为了使TLE5012B与其他系统中的集成电路同步,TLE5012B可以通过SSC接口配置为使用IFC引脚提供的外部时钟信号作为PLL的时钟源,而不是内部时钟。外部时钟模式仅在PWM或SPC接口配置中可用。
2.3、SD-ADC
将模拟的GMR电压和温度电压转换为数字量。
2.4、数字信号处理单元
1.智能状态机(ISM): 用于对来自GMR桥的原始信号进行误差补偿,包括偏移、偏移
温度漂移、幅度同步性和正交性,并执行诸如自动校准、预测和角度速度计算等附加功能。
**2.坐标旋转数字计算机(CORDIC):**包含用角度计算的三角函数。
**3.捕获比较单元(CCU):**用于生成PWM和SPC信号
**4.随机存取存储器(RAM):**包含配置寄存器
**5.激光熔丝:**包含用于误差补偿的校准参数以及IC的默认配置,这些参数在启动时被加载到RAM中。
2.5、接口
与TLE5012B的双向通信通过三线SSC接口实现。除了SSC接口外,还可以选择一个辅助接口,该接口可通过IFA、IFB、IFC引脚使用:PWM(脉冲宽度调制)、增量接口、霍尔开关模式、短脉冲宽度编码(SPC)。
2.6、安全特征
1、 测试向量可切换到ADC输入(通过SSC接口激活)
2、 滤波器输入流的反转或组合(通过SSC接口激活)
3、通过8位循环冗余校验(CRC)进行SSC通信的数据传输检查,以及用于SPC接口的4位CRC校验位
4、启动时对智能状态机(ISM)、坐标旋转数字计算机(CORDIC)、捕获比较单元(CCU)和模数转换器(ADCs)执行内置自检(BIST)程序
5、 可实现两个独立的活动接口
6、 过压和欠压检测
2.7、传感器原理
巨磁阻(GMR)传感器是通过垂直集成实现的。这意味着TLE5012B器件的逻辑部分上方集成了GMR敏感区域。这些GMR元件会根据磁场的方向改变其电阻。
对于施加磁场的两个分量,每个分量都有四个单独的GMR元件连接到一个惠斯通传感器电桥:X分量,Vx(余弦);Y分量,Vy(正弦)。采用全桥结构,可以获得最大的GMR信号,并且温度效应会互相抵消。
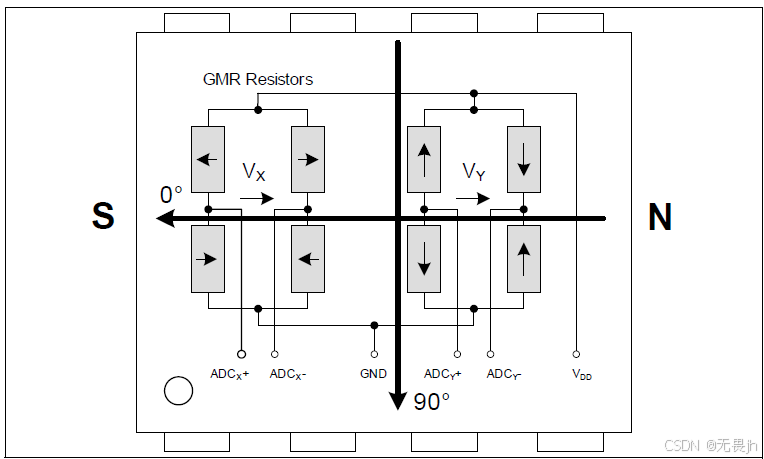
在上图中,电阻中的箭头代表固定在参考层中的磁场方向。 在参考层之上,通过一个非磁性层分隔,有一个自由层。当施加外部磁场时,自由层会与外部磁场方向一致地移动,而参考层保持固定。 GMR元件的电阻取决于参考层和自由层之间的磁场方向差异。
当外部磁场与参考层的方向平行时,电阻最小(参考层和自由层平行)。当外部磁场与参考层反平行时(参考层和自由层反平行),电阻最大。
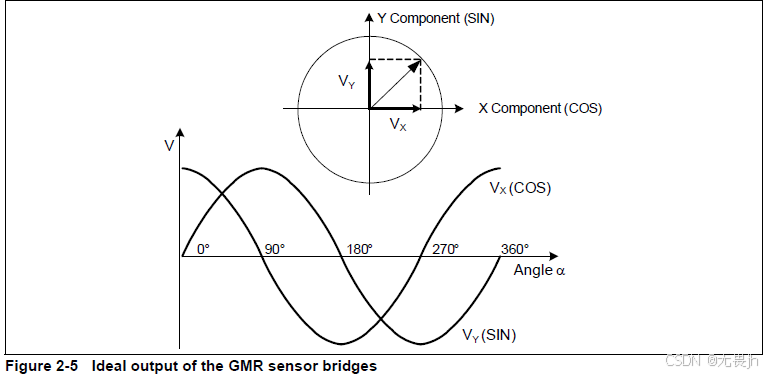
每个电桥的输出信号仅在两个最大值之间对180°是无歧义的。因此,两个电桥彼此正交放置,以测量360°。
通过使用三角函数ARCTAN2,可以从传感器电桥的原始X和Y信号中计算出真实的360°角度值。
三、规范
3.1、自动校准
TLE5012B是一款预校准的传感器;在启动时,存储在激光熔丝中的参数会被加载到触发器中。在运行过程中,TLE5012B需要1.5圈旋转来生成新的自动校准参数 。根据通过AUTOCAL位(模式2寄存器)选择的模式,参数会用新的自动校准参数进行更新。参数的更新方式是平滑的,以避免输出角度出现跳变;在选定的范围或时间内,每次只改变一个最低有效位(LSB)。 一旦参数更新完成,新的自动校准参数生成就会开始,因为自动校准是持续进行的。
自动校准模式如下:
•00:不进行自动校准。
•01:自动校准模式1。参数每次更新时会改变一个LSB,直到达到新的自动校准参数值(更新时间间隔取决于FIR_MD设置)。速度最快
•10:自动校准模式2。参数仅更新一个LSB。更新后,自动校准将立即开始计算
新的参数。速度最慢
•11:自动校准模式3。参数在每个11.25°的角度范围内更新一个LSB,直到达到新的自动校准参数值。
3.2、自动校准条件
自动校准算法依赖于收集感测元件的原始X和Y信号的最大值和最小值,因此它适用于转子持续旋转(完整的360°旋转)的应用场景。 只有在收集这些最小值和最大值期间温度变化不超过5开尔文时,才会从这些最小值和最大值计算偏移和幅度同步性误差的补偿参数,以避免因温度漂移而引起的误差。
为了使传感器在自动校准模式下保持准确,在应用中必须确保校准参数能够频繁更新。因此,自动校准仅应在磁体定期至少完整旋转一圈(TLE5012B内部检查完整旋转最多需要1.5圈)且温度保持在5开尔文范围内的应用中使用。
3.3、启用/禁用自动校准
当开启或关闭自动校准时,TLE5012B可能会错误地触发状态寄存器中的S_FUSE错误位,该错误位表示配置CRC((循环冗余校验)错误,此错误也会永久示示在SSC通信的安全字中。 当自动校准处于开启状态且需要关闭时:在禁用自动校准之前,应先写入自动校准关闭时的正确CRC。 这样,当传感器再次进行首次运行时的CRC检查时,它会看到一个一致的状态,从而不会出现CRC错误。正确的CRC必须在微控制器端进行计算。
当自动校准处于关闭状态且需要启用或重新启动时:在开启自动校准模式后,应在三个tupdate周期后通过SSC读取状态寄存器,并忽略可能出现的S_FUSE错误。
四、接口
4.1、同步串口通信-SSC
SSC是一种数字接口,允许进行双向数据传输;允许从寄存器中读取角度值之外的额外数据(如角度速度、原始值、温度等),并设置不同的配置(分辨率、启用/禁用预测或自动校准等功能);支持高数据传输速率,并具备循环冗余校验(CRC)和安全通信功能(数据传输后使用安全字);最多可以使用4个传感器与SSC连接;SSC适用于短距离传输(TLE5012B和电子控制单元应放置在同一块PCB上)。
4.1.1、SSC时序
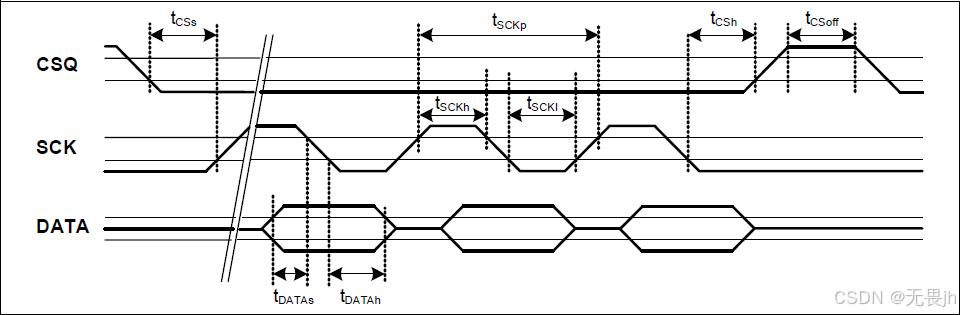
CSoff:一个传输结束,TLE5012B再次被选择之前的延迟时间
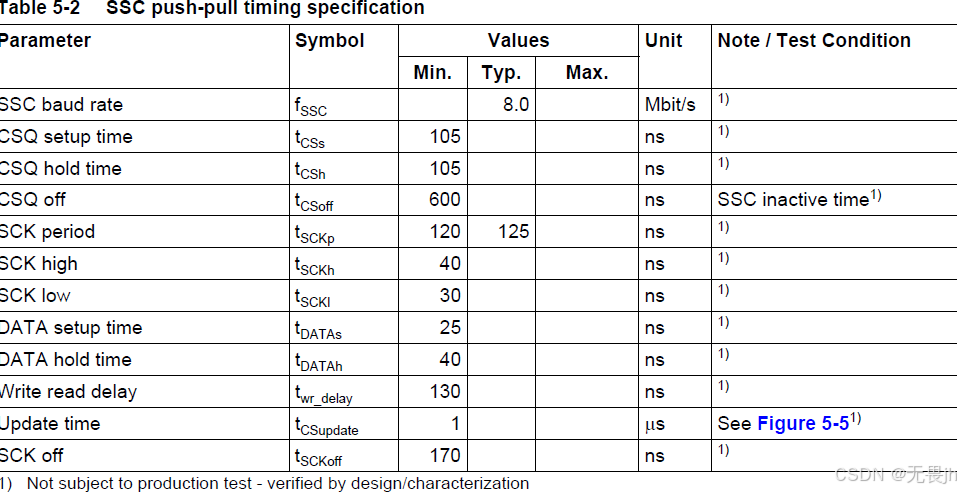
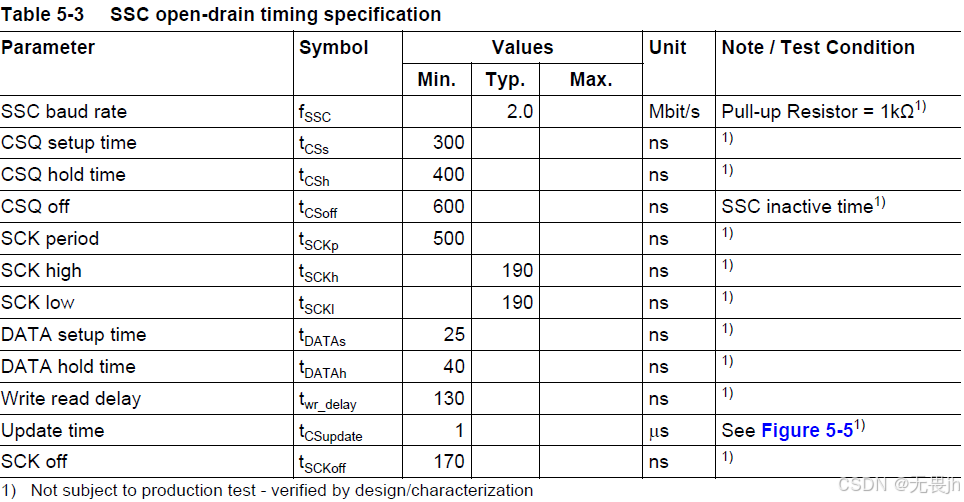
推挽和开漏模式下的时序参数
4.1.2、SSC数据传输
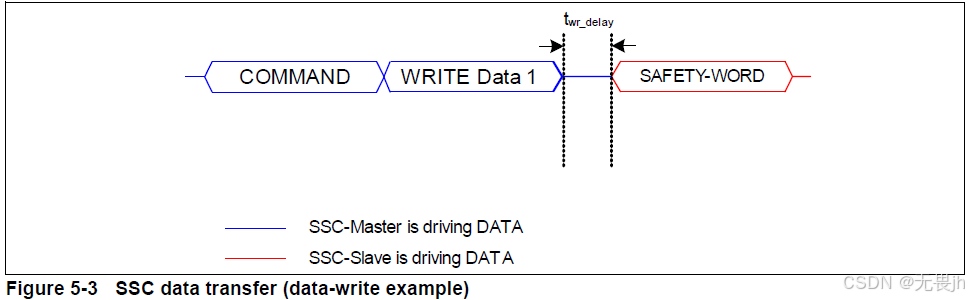
按照字对齐,包括这些传输字:操作字(访问和改变操作模式)、数据字(任一方向的任一数据传输)、安全字(确认数据传输并且提供状态信息) 。
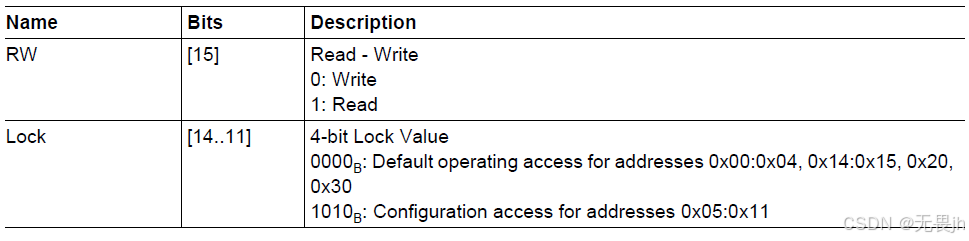
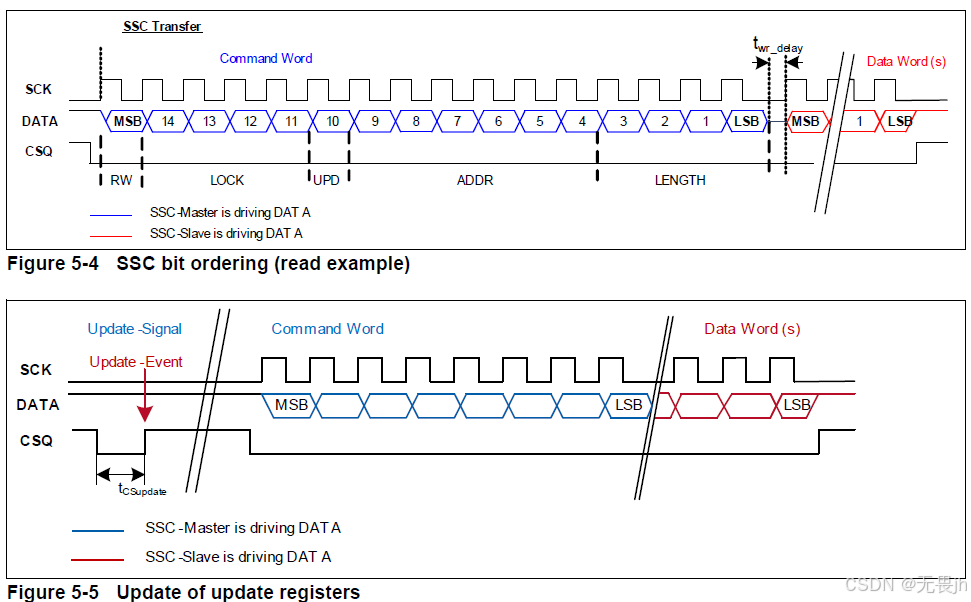
**操作字:**SSC通信通常由操作字初始化。操作字结构如下,UPD允许访问现在值和更新值,设置该位后,更新值会被立即存储在更新缓冲器,同时会使能所有必要系统参数的快照

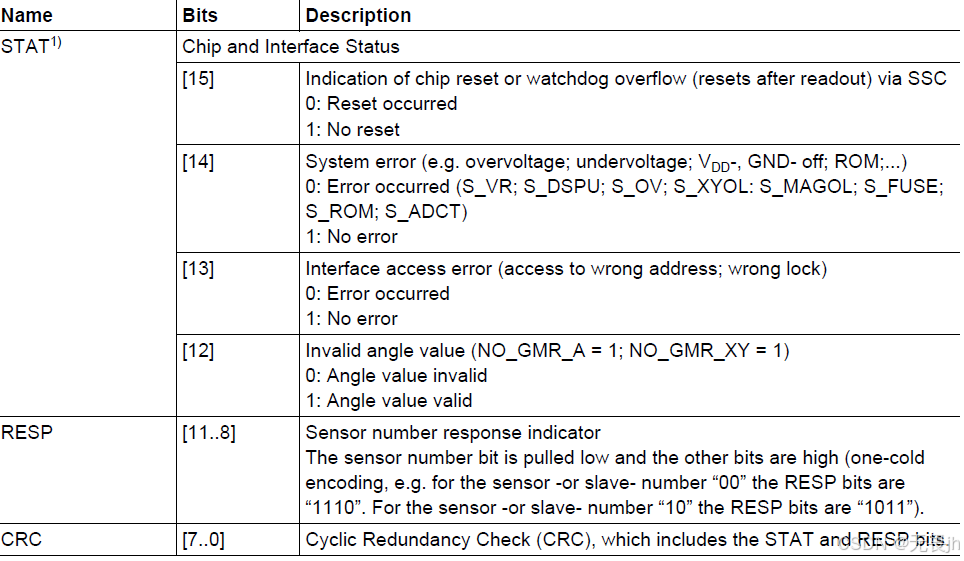
**安全字:**故障发生时,通信状态位仍然是低的,直到STAT寄存器通过SSC接口读取。一旦STAT被读,状态位将被置高。
SSC的数据通信:
SSC的数据通信具有以下特点:
1.数据传输顺序是先传最高有效位(MSB),后传最低有效位(LSB)。
2.数据在SCK的上升沿被放到数据线上,并在SCK的下降沿被读取。
3.SSC接口是按字对齐的。 每个传输的字之后都会激活所有功能。
4.在每次数据传输中,当传输的数据字数(ND(≥(1时,TLE5012B会在数据末尾附加一个16位的安全字。
5.在选中的TLE5012B的芯片选择引脚(CSQ)上出现"高"电平条件会立即中断传输。 CRC计算器将自动复位。
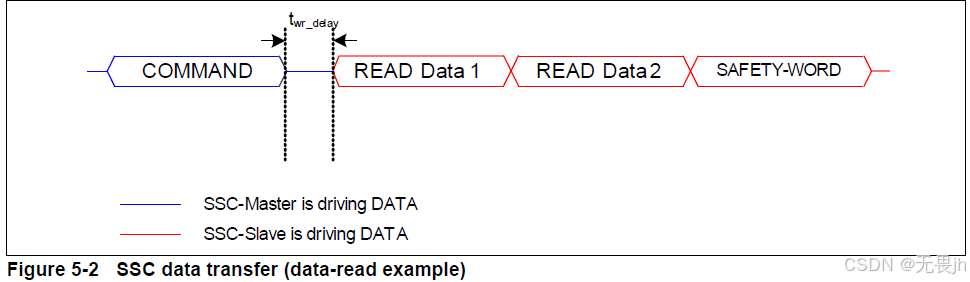
6.在改变数据传输方向后,在继续数据传输之前需要实现一个延迟twr_delay。 这是为了内部寄存器访问的需要。
7.如果在命令字中数据的数量大于1(ND(>(1),则从ADDR给出的地址开始,连续读取相应数量的寄存器。
8.如果在地址3FH处发生溢出,则传输将在地址00H处继续。
9.如果在命令字中数据的数量为零(ND=0),则读取ADDR给出的地址处的寄存器,但TLE5012B不会发送安全字。这允许快速读取一个寄存器。
**10.在没有先前数据传输(没有SCK脉冲,见图5-5)的情况下,CSQ的上升沿会将所有具有更新缓冲区的寄存器的内容保存到缓冲区中。**此过程用于在给定时间对所有相关的传感器参数进行快照。然后,可以通过发送对所需寄存器的
11.在发送安全字之后,传输结束。要开始另一次数据传输,CSQ必须至少在tCSoff时间内被取消选择一次。
12.默认情况下,SSC接口设置为推挽模式。只有当TLE5012B需要发送数据时,推挽驱动器才处于活动状态,否则DATA引脚被设置为高阻态。
4.1.3、总线模式
最多有四个从机连接到相同的总线,SPI主机需要四个CSQ管脚连接到每个从机(不能使用菊花链模式)
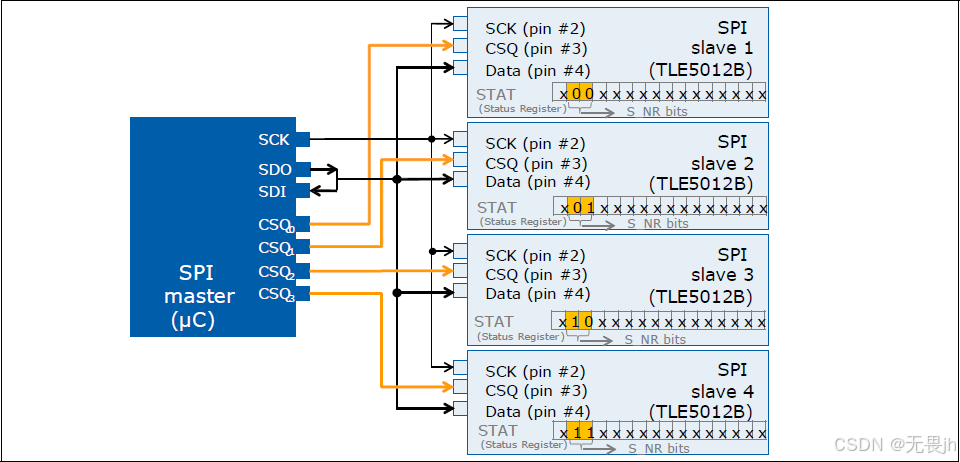
因为从机只有一个管脚用于数据传输,主机的数据输入输出管脚必须被连接。当传感器传输数据时,主机输出管脚必须时高阻态。
时钟生成
主设备必须发送一个命令字以启动主设备与从设备之间的通信。之后,主设备必须触发一个时钟信号,以便从设备能够用数据和/或安全字进行响应。为了生成时钟信号,将主设备的SDO引脚方向设置为输入,然后在SDO寄存器中写入0xFFFF。在生成用于响应的时钟信号之前,必须实现一个延迟twr_delay。通过这种方式,生成一个"1"的脉冲并触发时钟。 由于SDO已被设置为输入引脚,这个"1"的脉冲不会被传输,也不会干扰从从设备(传感器)传来的数据。这个步骤(写入0xFFFF)必须重复执行,次数与从从设备读取的次数相同。这通常是两次;一次用于数据,一次用于安全字。
启动时的从设备编号配置
通过SSC接口,CSQ线确保发送或接收的数据能够到达正确的从设备或来自正确的从设备。然而,如果从设备编号(S_NR位)在启动时没有正确配置,安全字可能会报告错误的从设备编号。即使在只有一个从设备的配置中,从设备编号也可能会出错。
为了确保安全字中收到的从设备编号是正确的(RESP位),请在启动时使用写入命令配置从设备编号。从设备编号位在状态寄存器中有描述。
**对于仅有一个或两个从设备的配置,还可以通过SCK和IFC引脚在启动时配置从设备编号,就像为SPC接口所做的那样(见图5-12)。**SSC接口的特殊之处在于,SCK是一条连接到主设备的线,因此在启动时只能有一个状态。通过将IFC引脚设置为"高"或"低",可以配置两个从设备编号。
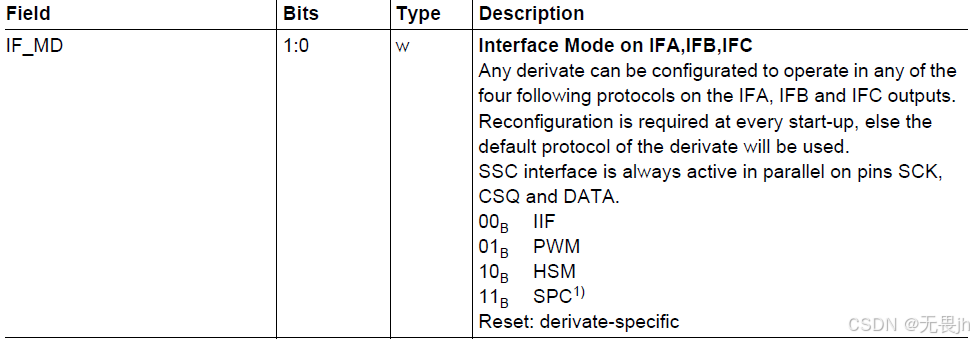
4.2、PWM接口
通过SSC接口(IF_MD = "01")在MOD_4寄存器中可以选择脉冲宽度调制(PWM)接口。
PWM更新速率可以在0EH寄存器(IFAB_RES)中以12位分辨率(包括诊断功能)编程设置为四个可能的步进值:0.25kHz、0.5 kHz、1.0 kHz、2.0 kHz
PWM使用一个恒定频率的方波,其占空比根据最近测量到的角度值(AVAL寄存器)进行调制。
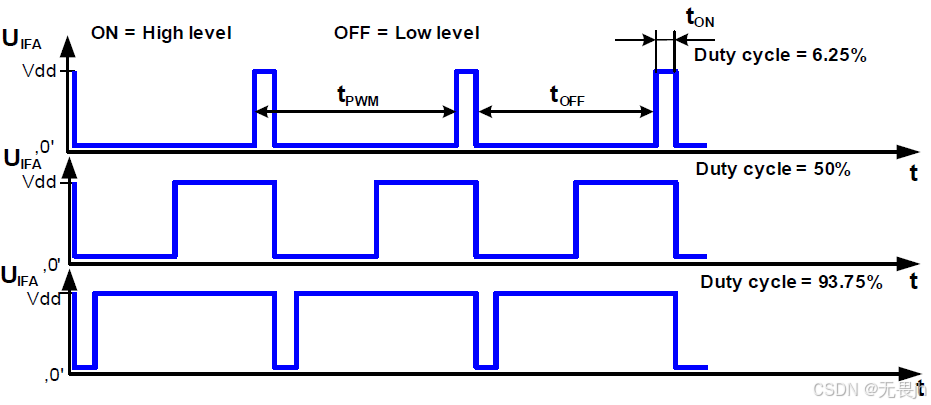
0-6.25%和93.75-100%的占空比范围用于诊断
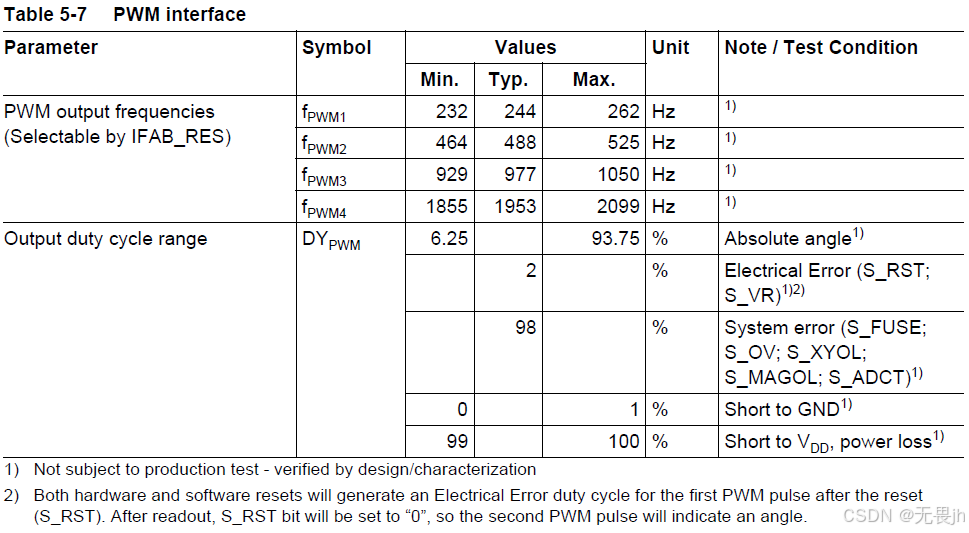
PWM频率计算公式如下:
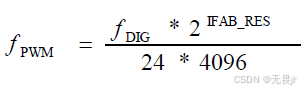


脉冲长度转换到角度值,只有87.5%的占空比能被转换为角度值。

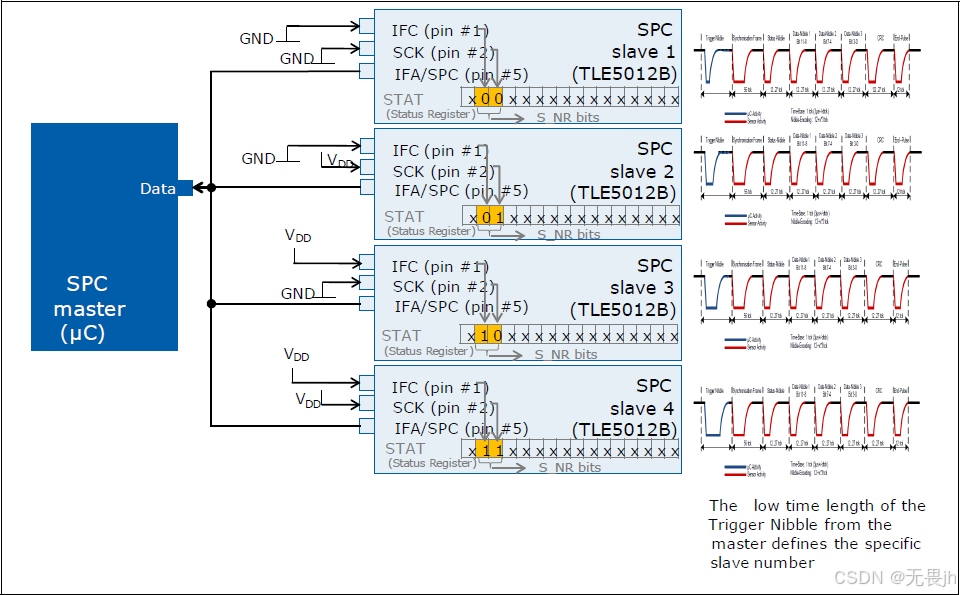
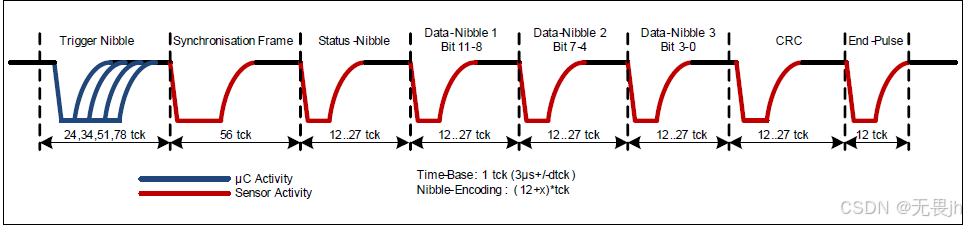
4.3、短PWM编码(SPC)
短脉冲宽度编码(SPC)是一种基于SAE J2716定义的SENT协议(单边沿 nibble 传输)的同步数据传输方式。与暗示连续传输数据的SENT不同,SPC协议仅在从微控制器接收到特定的触发脉冲后才传输数据。所需的触发脉冲长度取决于可配置的传感器编号。因此,SPC允许在一条总线上操作多达四个传感器。
SPC使得能够使用增强的协议功能,因为可以选择不同的传感器从机(ID选择)。从机编号(S_NR)可以由SCK和IFC引脚的外部电路给出。如果SCK上的VDD为高电平,S_NR0可以设置为1,如果SCK上的GND为低电平,S_NR0等于0。同样,可以通过IFC引脚调整S_NR1。 只需要一条数据线连接到从机,因为触发nibble的长度将唤醒一个或另一个从机,如接下来的段落中所解释的。
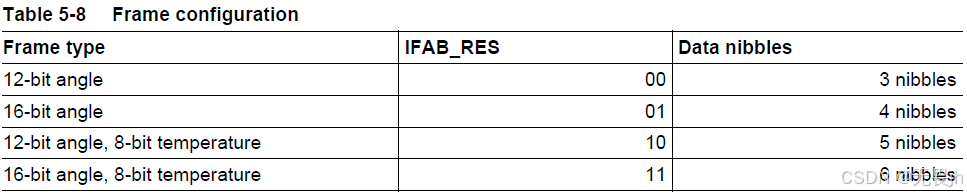
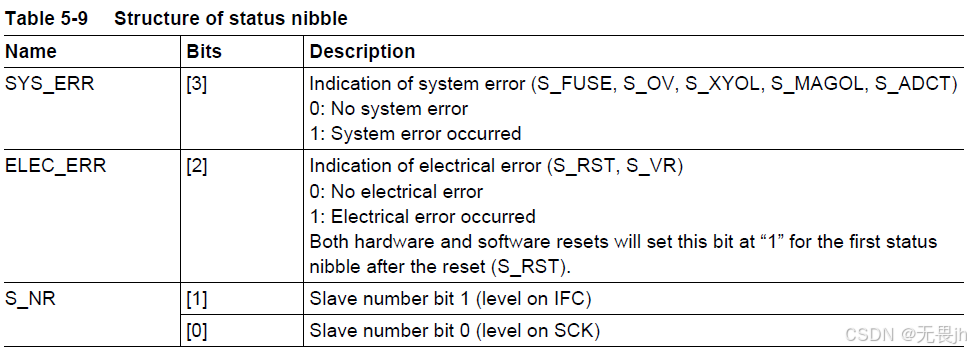
SPC的帧格式如下
状态半字节
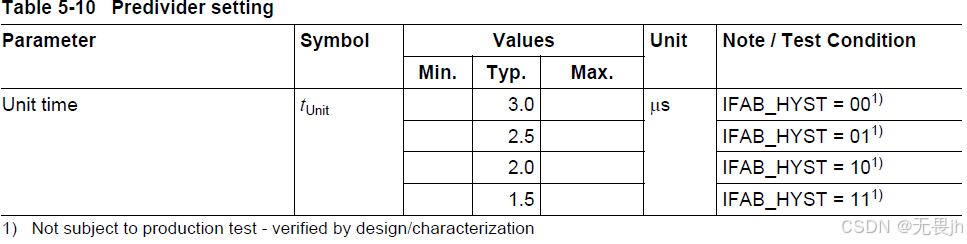
4.3.1、tick设置
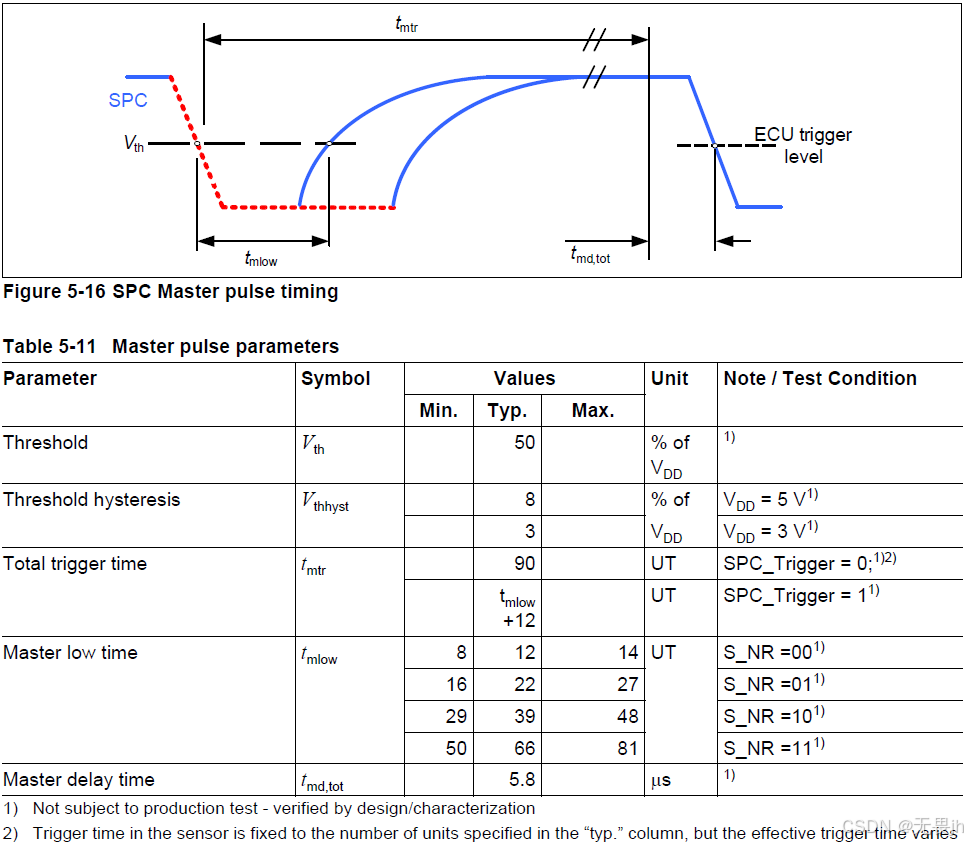
4.3.2、主触发脉冲需求
SPC传输由IFA管脚上的主触发脉冲启动,为了检测IFA管脚的低电平,电压必须低于阈值电压Vth,传感器一检测到IFA线被释放,Vth就被穿过了。
如果主触发脉冲的低电平时间超过最大时间,传感器不会应答并且在主触发脉冲穿过Vth的30μs内再次触发。
4.4、霍尔开关模式(HSM)
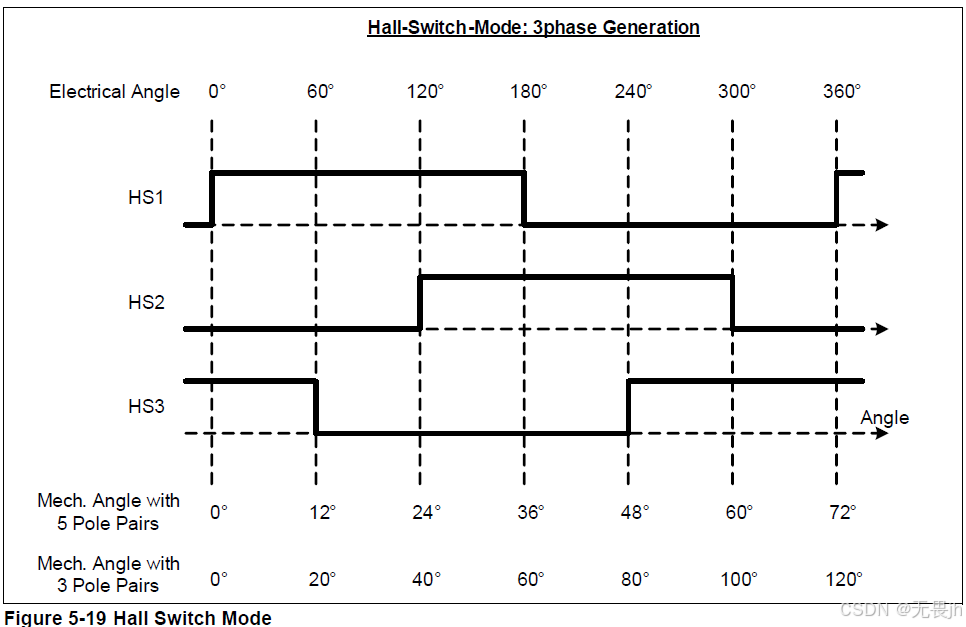
TLE5012B中的霍尔开关模式(HSM)使其能够模拟3个霍尔开关的输出。霍尔开关常用于电控电机中以确定转子的位置。通过这3个输出信号,电机将被正确地换向。根据使用的转子极对数,需要控制不同的电周期。 这可以在0EH(HSM_PLP)中选择。图5-19展示了三个输出信号以及电角度和机械角度之间的关系。机械0°点始终用作参考点。
HSM通常与推挽输出一起使用,但可以在IFAB_OD寄存器中将其更改为开漏。
4.5、增量接口(IIF)
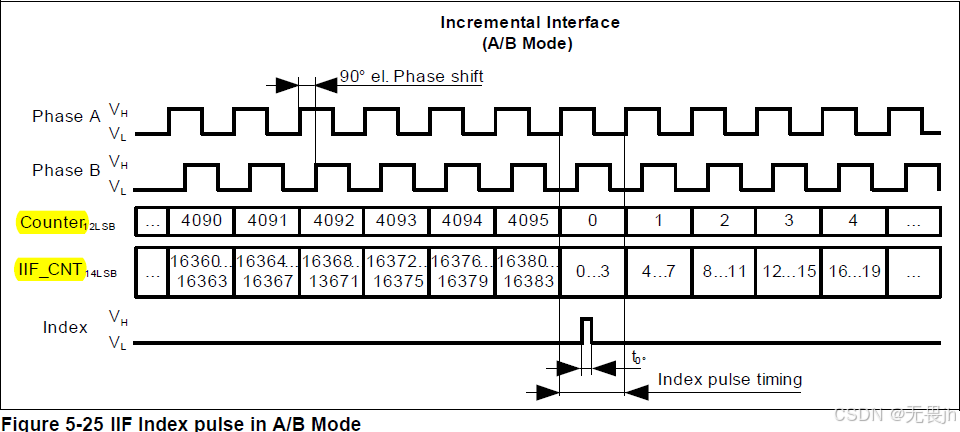
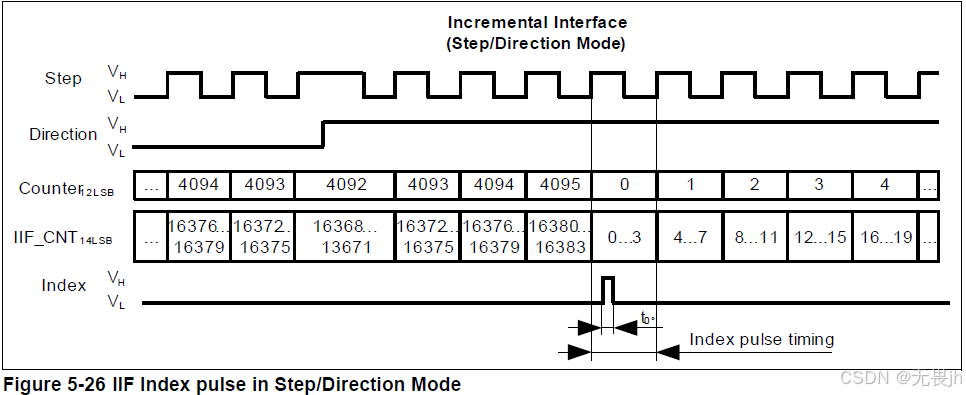
增量接口(IIF)模拟了占空比为50%的光学正交编码器的操作。 它在每个角度步长传输一个方波脉冲,步长的宽度可以在寄存器MOD_4(IFAB_RES)中配置,范围从9位(每完整旋转512步)到12位(每完整旋转4096步)。旋转方向可以通过两个通道IFA和IFB之间的相位差(A/B模式)或者通过IFB通道的电平(步进/方向模式)来确定,如图5-21和图5-22所示。增量接口可以在寄存器MOD_1(IIF_MOD)中配置为A/B模式或步进/方向模式。
使用增量接口需要微控制器上有一个上/下计数器,该计数器对脉冲进行计数,从而跟踪绝对位置。通过同时使用SSC接口,可以定期同步计数器。通过SSC接口读取的角度值(AVAL寄存器)可以与存储的计数器值进行比较。如果出现不同步的情况,微控制器会将差异加到当前计数器值上,以使TLE5012B与微控制器同步。
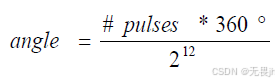
**在启动后,IIF会传输与当前绝对角度值相对应的脉冲数量。**因此,微控制器可以获得关于绝对位置的信息。表示零交叉的索引信号可在IFC引脚上获得。
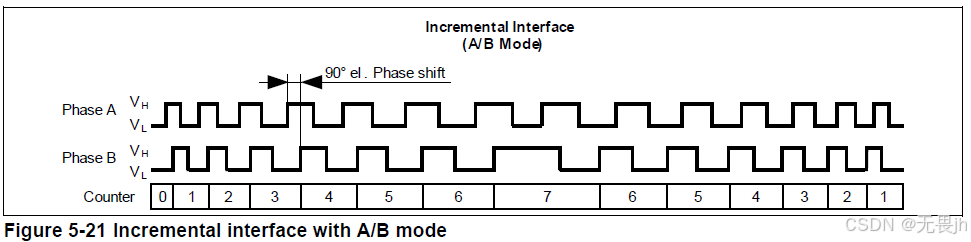
相位A跟随相位B代表顺时针旋转,反过来就是逆时针旋转。通过设置ANG_DIR=1
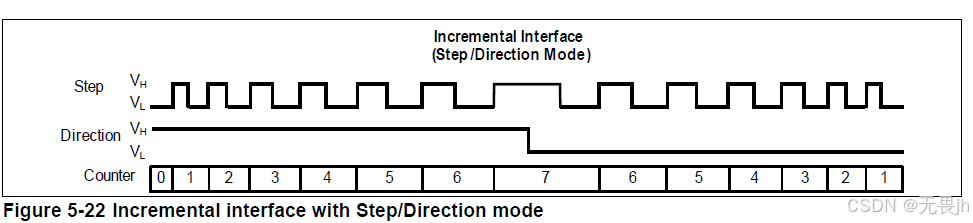
A脉冲输出增量,B代表方向
启动脉冲
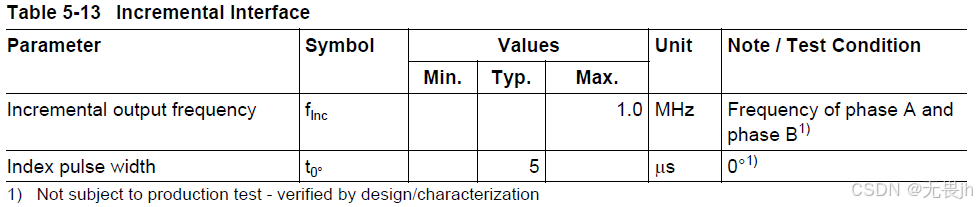
在启动后,处于绝对模式(寄存器MOD_4中的HSM_PLP位的默认模式),IIF将产生足够的脉冲,以最短的方向计数到初始角度位置。这些脉冲可能以最大频率在IFA和IFB引脚上生成(见表5-13),因此启动脉冲可能需要长达2.1毫秒才能计数到180°的初始角度位置(最大角度距离)。一旦达到启动位置,计数方向可能会改变(取决于最短方向是否与实际旋转方向一致)。在启动脉冲期间,从初始位置的角度位置变化将被跟踪。

IFC引脚(或IIF索引)在零交叉时生成一个脉冲。 这个输出可以作为检查使用,或者与相位A/相位B输出进行比较。当内部增量接口计数器跨过0°时,将生成IIF索引脉冲。
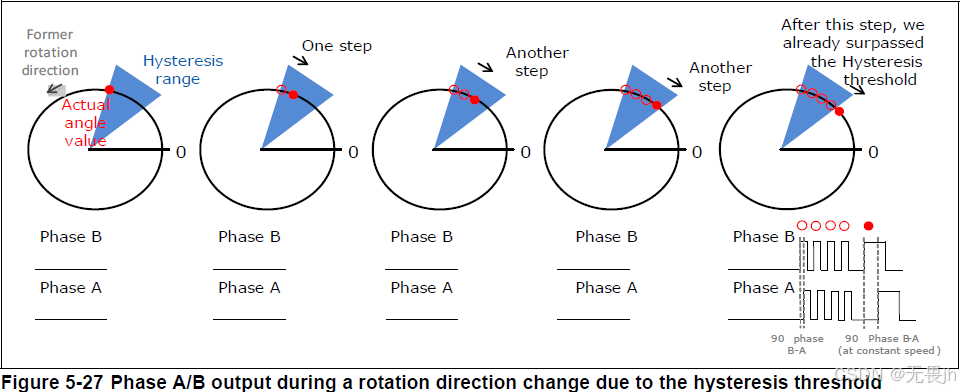
**TLE5012B设有一个磁滞阈值,以避免因转子或系统的机械振动而导致意外脉冲步进。默认的磁滞值为0.703°,并且可以在IFAB寄存器(IFAB_HYST)中进行更改。**一旦超过磁滞阈值,相位A和相位B将输出错过的步进,并继续以正常工作模式运行。脉冲错过的脉冲允许对所有步进进行计数,并正确计算角度位置。错过的脉冲数量取决于磁滞阈值和步进分辨率。