文章目录
- [一、自动驾驶 整体架构](#一、自动驾驶 整体架构)
-
- 1、自动驾驶整体架构图
- [2、自动驾驶 车端系统 架构](#2、自动驾驶 车端系统 架构)
- [3、自动驾驶 云端系统 架构](#3、自动驾驶 云端系统 架构)
- [二、自动驾驶 硬件概述](#二、自动驾驶 硬件概述)
一、自动驾驶 整体架构
1、自动驾驶整体架构图
下图是 自动驾驶 整体架构图 :
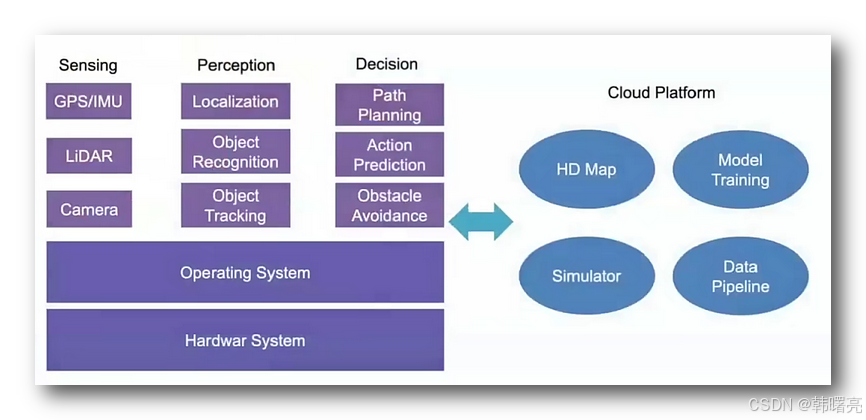
自动驾驶 整体架构 分为 " 车端系统 " 和 " 云端平台 " 两大基石 ;
-
车端系统 在车辆上实时运行的部分 , 如下图所示 :
-
云端平台 在远程数据中心为车端提供支持的部分 , 如下图所示 :
2、自动驾驶 车端系统 架构
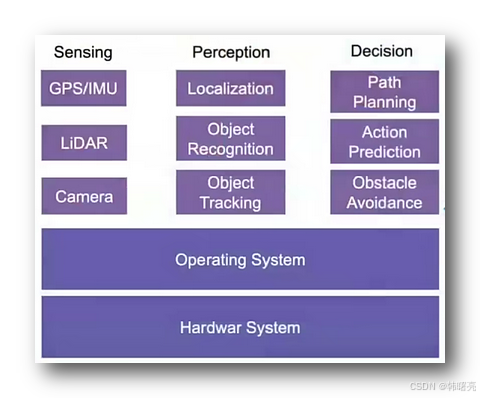
自动驾驶 车端系统 架构 :
- 硬件系统 ( Hardwar System ) : 位于 架构最底层 , 是自动驾驶功能实现的 物理基础 , 提供 算力支撑 ( 如 : 芯片 ) 、执行机构 ( 如 : 动力控制单元 ) 、传感硬件搭载基础 ( 如 : 雷达、摄像头安装支架等 ) ,保障 上层软件 与 算法 能在实体硬件上运行 ;
- 操作系统 ( Operating System ) : 位于 硬件系统 之上 , 负责 管理 和 协调 硬件资源 , 为上层应用软件提供统一的接口 , 具备 高实时性、高可靠性 和 高安全性 , 以确保车辆能够及时响应各种驾驶任务和环境变化 ; 该层 为 传感器 ( Sensing ) 系统 / 感知 ( Perception ) 系统 / 决策 ( Decision ) 系统 三个系统 提供 稳定的 软件运行环境 ;
- 传感器 ( Sensing ) 系统 : 是 自动驾驶 的 " 眼睛 + 耳朵 " , 通过 多种类型的 传感器硬件 采集环境与车辆自身数据 ;
- 定位模块 ( GPS / IMU ) : GPS 提供全局位置信息 , 应对 开阔道路 ; IMU 惯性测量单元 利用加速度、角速度传感 , 在 隧道、高楼遮挡等 GPS 信号弱场景 , 短时精准推算车辆姿态、位置,二者融合实现连续、可靠定位 ;
- 雷达模块 ( LiDAR : 激光雷达、毫米波雷达、超声波雷达 ) :
- 激光雷达 : 发射激光束扫描周边 , 构建三维点云图 , 精准探测 障碍物 距离、轮廓 , 对 静态物体 ( 如 : 路沿、护栏、锥桶、水马 ) 、动态物体 ( 如 : 行人、车辆 ) 感知能力强 , 是 高精地图构建、避障 的 关键 ;
- 毫米波雷达 : 擅长 测速、测距 , 对运动目标实时监测 , 且 不受光照、天气 ( 如 : 雨、雾 ) 的 影响 ;
- 超声波雷达 : 通过 超声波 发射与反射 , 短距离探测障碍物 , 成本低、响应快 , 常用于泊车辅助 ;
- 摄像头模块 :
- 车外摄像头 : 覆盖 前视、后视、环视 等视角 , 识别交通标识(如限速牌 )、车道线、行人姿态等视觉信息 ;
- 车内摄像头 : 监测驾驶员状态 ( 如 : 疲劳、分心 ) , 补充环境感知维度 , 与雷达形成 ( 视觉 + 雷达 ) 融合感知 ;
- 感知 ( Perception ) 系统 : 是 " 理解环境 " 的关键环节 , 基于 传感器原始数据 进行一系列 的 智能解析 ;
- 定位功能 ( Localization ) : 融合 GPS、IMU、激光雷达点云匹配高精地图等多源数据 , 实现车辆 在 高精地图 坐标系 下厘米级定位 , 让车辆清楚 " 自己在哪 " , 是 路径规划、决策 的基础 ;
- 物体识别 ( Object Recognition ) : 借助 机器视觉、点云识别 算法 , 区分 图像、点云中的 各类目标 ( 如 : 区分行人、车辆、路牌 ) , 标注类别、边界 , 理解 " 周围有什么 " ;
- 物体追踪 ( Object Tracking ) : 对 识别出 的 动态物体 ( 如 : 变道车辆、横穿行人 ) , 持续跟踪 运动轨迹、速度、加速度 , 预判其行为趋势 , 为决策系统提供动态目标的 " 运动逻辑 " ;
- 决策 ( Decision ) 系统 : 基于 感知系统 获得的 输出结果 , 进行 行动决策 ;
- 路径规划 ( Path Planning ) : 结合 高精地图、定位信息、交通规则 , 规划从起点到终点的合理行驶路线 , 平衡效率与安全 , 如 : 规划 躲避拥堵路径、规划最优车道、规划免费路径 ;
- 行为预测 ( Action Prediction ) : 分析 周边交通参与者 的行为意图 , 提前预判风险场景 , 让决策更具前瞻性 , 如 : 路口车辆是否会转弯、行人是否会横穿 ;
- 避障 ( Obstacle Avoidance ) : 实时监测行驶路径上 静态 ( 如 : 施工路障 ) 、动态 ( 如 : 突然切入的车辆 ) 障碍物 , 计算安全绕行轨迹或制动策略 , 保障行驶安全 ;
3、自动驾驶 云端系统 架构
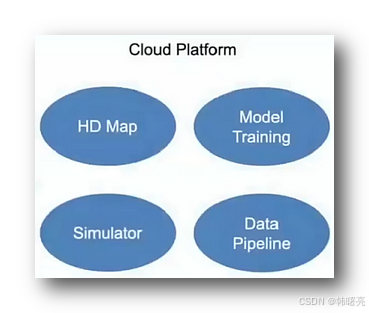
自动驾驶 云端系统 架构 : 云端系统 是 架构的 " 智慧延伸 " 与 " 数据后盾 " ;
- 高精地图 ( HD Map ) : 存储 道路拓扑 ( 如 : 车道数量、转向规则 ) 、地标 ( 如 : 交通灯位置 ) 、精度达厘米级的地图数据 , 为车辆定位、路径规划提供全局 blueprint ( 蓝图 ) , 支持在线更新 , 适配道路施工、新规调整 ;
- 模型训练 ( Model Training ) : 利用 海量真实路测数据、模拟场景数据 , 训练 感知、决策 算法模型 , 迭代 优化识别精度、决策合理性 , 让自动驾驶系统 " 越用越聪明 " ;
- 仿真器 ( Simulator ) : 构建 虚拟测试场景 ( 如 : 极端天气、复杂路口 ) , 在安全环境下验证算法 , 加速功能迭代 , 降低实车路测风险与成本 ;
- 数据管道 ( Data Pipeline ) : 打通 车端传感器 数据采集 、车端 - 云端 通信 传输 、数据存储、标注、训练全流程 , 保障数据高效流转 , 为 AI 算法迭代 提供 数据集 ;
二、自动驾驶 硬件概述
1、自动驾驶 硬件 简介
在下图中图中展示了自动驾驶汽车上的多种硬件部件 :
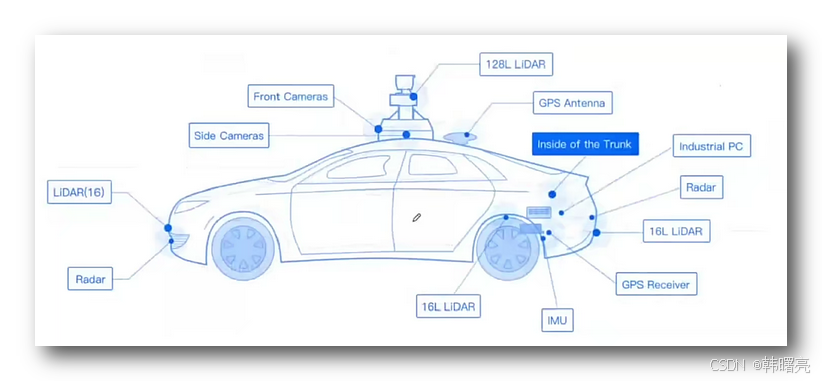
- 128 线激光雷达 ( 128L LiDAR ) : 即 128 线激光雷达 , 安装在车顶位置 , 该激光雷达分辨率较高 , 通过发射 128 束激光束并测量反射光的时间延迟 , 来探测周围环境中物体的距离、位置、形状等信息 , 能 构建高精度的三维点云地图 , 为自动驾驶汽车提供详细的环境感知数据 , 用于 障碍物检测、路径规划等 ;
- 前视摄像头 ( Front Cameras ) : 安装在车顶 或 前档内侧 , 靠近激光雷达的位置 , 利用 图像传感器 获取车辆前方的 视觉图像信息 , 通过 计算机视觉算法 可以识别 交通标志、车道线、行人、其他车辆 等目标 , 为自动驾驶提供视觉层面的环境信息 ;
- 侧视摄像头 ( Side Cameras ) : 安装在 车身侧面 , 作用是 获取车辆 侧面 的视觉图像 , 帮助自动驾驶系统感知车辆侧面的交通状况 , 比如检测相邻车道的 车辆位置、判断是否有车辆正在超车等 , 辅助进行 变道决策、盲区监测等功能 ;
- 16 线激光雷达 ( 16L LIDAR ) : 分别安装在 车头 和 车身侧面 , 16 线激光雷达的线束较少 , 分辨率相对较低 , 但同样能 发射激光束 探测周围物体的距离信息 , 可用于 近距离的环境感知 , 辅助车辆在 复杂路况 下的 局部避障 和 环境建模 ;
- 全球定位系统天线 ( GPS Antenna ) : 安装在车顶 , 用于接收卫星信号 , 能够 获取车辆的大致地理位置信息 , 虽然单独使用时定位精度有限 , 但结合其他传感器数据(如 IMU 数据),可以实现较为精准的车辆定位,是自动驾驶中全局定位的重要组成部分 ;
- 全球定位系统接收器 ( GPS Receiver ) : 安装在靠近车身 底部位置 , 与 GPS 天线 配合工作 , 接收并解析卫星信号 , 将 卫星信号 转化为车辆的 位置、速度 和 时间 等信息 , 提供给 自动驾驶系统 用于 导航和定位 ;
- 惯性测量单元 ( IMU ) : 安装在 靠近车轮 的车身位置 , 包含 加速度计 和 陀螺仪 等传感器 , 可以测量车辆的 加速度、角速度 和 姿态信息 , 用于在 短时间内 精确推算车辆的运动状态 , 在 GPS 信号不佳 时 ( 如 : 隧道、地库 ) , 辅助车辆进行 连续定位 ;
- 工业个人计算机 ( Industrial PC ) : 安装在后备箱内 , 是 自动驾驶系统 的 计算核心 , 负责处理来自 各种传感器 ( 如 : 激光雷达、摄像头、雷达等 ) 的数据 , 运行感知、决策、规划等算法 , 输出控制指令给车辆的执行机构 ( 如 : 转向、制动、动力系统 等 ) , 实现自动驾驶功能 ;
- 毫米波雷达 / 超声波雷达 ( Radar ) : 安装在 车头 和 车身侧面 , 毫米波雷达 发射 毫米波频段 的电磁波 , 通过 接收反射波 来获取 目标物体的 距离、速度 和 角度信息 , 毫米波雷达 对恶劣天气的适应性强 , 能够在雨、雪、雾等天气条件下正常工作 , 可用于实时监测 车辆前方 和 侧面 的 车辆、行人等目标 , 辅助进行 自适应巡航、前碰撞预警、盲点监测等驾驶辅助功能 ;
2、摄像头简介 - 前视摄像头、侧视摄像头、环视摄像头
前视摄像头
前视摄像头 主攻 远距目标识别 , 侧视摄像头 覆盖盲区 , 环视摄像头专注近场环境 ;
前视、侧视、环视 摄像头 构成自动驾驶的 " 视觉三角 " , 分别 针对 远、中、近 场环境 提供 关键感知数据 , 多路摄像头输入 经标定同步后 , 通过 BEV 算法生成统一环境模型 , 提升感知鲁棒性 ;
前视摄像头 : 是自动驾驶系统的核心传感器之一 , 主要用于 识别前方道路环境,包括车道线、交通标志、行人、车辆等目标,并为路径规划、碰撞预警等高层功能提供数据支持 ;
- 安装位置 : 安装在车辆 前挡风玻璃内侧 , 靠近后视镜的位置 ;
- 主要功能 :
- 车道感知 : 实时 检测 和 识别 前方车道线 , 判断车辆是否偏离车道 , 是 车道保持辅助 ( LKA ) 和 车道居中 ( LCC ) 功能的基础 ;
- 交通标志识别 : 识别 限速、禁止超车 等标志 并 提示驾驶员 ;
- 前方目标检测 : 识别前方的车辆、行人、非机动车、交通标志(如限速、禁止通行等)、交通信号灯等 ;
- 距离与速度估算 : 通过 单目 或 双目视觉算法 , 估算前方目标的 距离 和 相对速度 , 该数据仅用于参考 , 更精确的距离和速度计算依靠 激光雷达 和 毫米波雷达 ;
- ACC 自适应巡航控制 : 为 ACC 系统提供 前方车辆的 速度 和 距离信息 , 实现自动跟车 ;
- AEB 自动紧急制动 : 在检测到 即将发生碰撞 且驾驶员 未采取措施时 , 触发自动刹车 ;
- 硬件类型 :
- 单目前视摄像头 : 单个摄像头 , 通过 算法 和 对图像中物体的特征分析 ( 如 : 大小、形状、纹理 等 ) ;
- 双目前视摄像头 : 由两个摄像头组成 , 模拟 人类双眼 的视觉效果 , 利用 视差原理 计算目标物体的 三维信息 , 能够更准确地获取 目标物体的距离信息 ;
- 三目前视摄像头 : 由三个不同焦距的摄像头组成 , 分别是 :
- 长焦摄像头 : 远距离目标检测 , 可提前发现 较远处的 车辆、行人 ;
- 中焦摄像头 : 常规距离的目标识别和场景感知 ;
- 广角摄像头 : 覆盖更大的视野范围 , 用于检测 近距离的障碍物 和 获取 更宽视角的环境信息 ;
- 技术特点 :
- 环境恶劣 : 雨雪、强光、大雾、夜晚 图像质量下降 , 需结合 红外补光 或 多帧融合算法 ;
- 算力限制 : 高分辨率图像处理 对车载芯片算力要求高 , 需优化算法压缩数据量 ;
侧视摄像头
侧视摄像头 : 用于 消除车辆侧后方盲区、辅助变道、汇入车流等场景 , 是 盲区监测 和 自动泊车 的关键传感器 ;
- 安装位置 : 安装在车辆 B 柱 、 后视镜下方 、 门把手附近 、 翼子板处 ;
- 主要功能 :
- 盲区监测 ( BSD ) : 变道时 预警侧后方来车 ;
- 变道辅助 ( LCA ) : 在驾驶员打转向灯准备变道时 , 如果侧后方有来车,系统会发出警示 ( 如 : 声音、灯光、方向盘震动 ) ;
- 开门防撞 ( DOW ) : 检测后方行人或车辆 , 避免开门碰撞 ;
- 自动泊车 : 辅助 侧向车位检测 , 结合超声波雷达实现精准泊入 ;
- 侧向目标感知 : 在自动驾驶模式下 , 感知 侧方的 车辆、行人、非机动车 , 为变道、避让等决策提供依据 , 识别侧向交通标志、施工区域 , 优化行驶路径 ;
- 技术特点 :
- 探测角度 : 视野角度较广 , 覆盖车辆侧后方的大片区域 ;
- 探测距离 : 探测距离适中 , 主要用于 中近距离的监测 ;
环视摄像头
环视摄像头 : 通过 多视角 图像 拼接生成车辆周围 360 度全景图像 , 主要用于 低速场景下的 环境感知 与 泊车辅助 ;
- 安装位置 : 车辆四周 ( 前、后、左、右 ) , 通常采用 鱼眼镜头 ( FOV 180° ~ 190° ) ;
- 主要功能 :
- 自动泊车 : 识别车位边界、障碍物 , 规划泊车路径 ;
- 低速避障 : 检测行人、锥桶等近场目标 , 支持 交通拥堵辅助 ( TJA ) ;
- 全景显示 : 为驾驶员 提供实时环视画面 , 增强驾驶信心 ;
- 技术特点 :
- 近场精度 : 10 厘米级 物体检测需 高分辨率 与 深度估计算法 ( 如 : 光流法 ) ;
- 数据融合 : 需与 超声波雷达、激光雷达协同 , 弥补视角盲区 ;
3、雷达简介 - 激光雷达、毫米波雷达 、超声波雷达
激光雷达
激光雷达 : 是 L3 级以上 自动驾驶 的核心传感器 , 高精度 3D 环境建模专家 ;
- 工作原理 :
- 测定距离、速度 : 通过 向目标发射激光束 , 并接收反射信号 , 计算激光从发射到返回的时间来测定 物体 的 距离、速度 ;
- 测定形状 : 通过 高速旋转的镜面 或 固态方式 , 进行 多线束扫描 , 可测量物体形状 , 生成高精度三维点云图 ;
- 主要用途 :
- 冗余传感器 : 作为 感知系统 的 " 眼睛 " , 是 自动驾驶 的 关键冗余传感器 , 提供最可靠的环境建模 ;
- 高精地图采集、定位 : 与 GNSS / IMU 结合 , 用于 创建 和 实时匹配高精地图 , 将 实时点云 与 高精地图 对比 , 实现厘米级定位 ;
- 场景感知 : 在城市复杂路况下,精确识别静态和动态障碍物 , 支持无保护左转、路口通行等决策 ;
- 增强感知 : 提升 AEB 、 高速 NOA 、 城市 NOA 等功能的 安全性 和 可靠性 ;
- 障碍物检测与分类 : 精确 识别 车辆、行人、骑行者、路缘、护栏 等 ;
- 可行驶区域规划 : 构建详细的 3D 环境模型 , 为路径规划提供依据 ;
- 自动泊车 ( APA ) / 记忆泊车 ( HPP ) : 精准识别 车位线、相邻车辆轮廓 , 计算泊车路径 , 避免刮擦 ;
- 紧急制动 ( AEB ) 辅助 : 在激光雷达 + 摄像头融合感知下 , 对 " 异形障碍物 " ( 如 : 掉落的货车轮胎、道路施工锥桶 ) 进行精准识别 , 触发紧急制动 ;
- 技术优势 :
- 超高分辨率 : 能精确感知物体的 轮廓、形状、甚至姿态 ( 如 : 区分行人是站着还是蹲着 ) ;
- 精准测距 : 测距精度可达 厘米级 , 能准确判断障碍物位置 ;
- 3D 建模 : 生成的 点云数据 可直接用于 高精度地图定位 和 障碍物识别 ;
- 无多普勒盲区 : 对 静止物体 ( 如 : 前方故障车辆、路边石、护栏 ) 和 低速运动物体 ( 如 : 缓慢行走行人 ) 的 探测无盲区 , 而毫米波雷达对 低速 / 静止 目标的感知精度会下降 ;
- 技术劣势 :
- 成本高 : 激光雷达价格 是 自动驾驶 成本的主要瓶颈 , 固态激光雷达正在大幅降低成本 ;
- 恶劣天气性能差 : 大雨 、 浓雾 、 大雪 会严重散射激光光束 , 导致点云质量下降甚至失效 ;
- 无法直接测速 : 需通过 多帧数据 对比来 计算速度 ;
毫米波雷达
毫米波雷达 : 是 全天候 测速 和 测距 的主力 ;
- 工作原理 : 通过发射 毫米波段的无线电波 并 分析反射信号 , 来探测物体的 距离 、速度 和 角度 ;
- 测速 : 通过 多普勒效应 测速 ;
- 测距 : 通过 飞行时间法 测距 ;
- 主要用途 :
- 精准追踪动态目标 : 通过多普勒效应 , 能实时测算目标的运动速度 ( 如 : 前方车辆急减速、邻车道车辆超车速度 ) , 响应速度快 ( 毫秒级 ) , 适合高速行驶中的 " 跟车、变道决策 " ;
- 自适应巡航 : 前向雷达负责锁定前车 , 保持安全车距 ;
- 自动紧急制动 : 雷达快速检测前方潜在碰撞风险并触发制动 ;
- 盲点监测、变道辅助 : 通过 布置在车辆四角 的 角雷达 ( 毫米波雷达 ) 监控侧后方盲区 ;
- 车道偏离预警、车道保持辅助 : 通过 侧后方毫米波雷达探测邻车道车辆 , 避免变道时碰撞 ;
- 交叉路口辅助 : 监控横向来车 , 避免碰撞 ;
- 技术优势 :
- 全天候工作 : 穿透力极强 , 能轻松应对 雨、雾、雪、尘、强光 等恶劣天气 , 可靠性最高 ;
- 直接测速 : 利用多普勒效应 , 能直接、精确地测量目标的相对径向速度 , 这是其独一无二的优势 ;
- 探测距离远 : 前向远程雷达 ( LRR ) 探测距离可达 250 米以上 , 为高速行驶提供充足反应时间 ;
- 成本效益高 : 技术成熟 , 77GHz 频段 ( 主流自动驾驶频段 ) 芯片 已实现 大规模量产 , 成本仅为激光雷达的 十分之一 ;
- 可隐蔽安装 : 可安装在保险杠内 , 不影响车辆外观 ;
- 技术劣势 :
- 分辨率较低 : 传统 毫米波雷达 只能识别点目标 , 难以识别 物体具体轮廓 , 无法区分 静止物体 ( 如 : 路边护栏 ) 和 危险障碍物 ( 如 : 锥桶、水马、抛锚的汽车 ) ;
- 存在角分辨率盲区 : 在近距离 , 相邻物体可能被识别为一个目标 ;
- 易受电磁干扰 : 多车近距离时 , 雷达信号可能互相干扰 ;
- 对静止物体探测能力弱 : 传统算法 难以可靠 区分 静止障碍物 和 路面杂波 ( 如 : 井盖、减速带 ) , 易产生误报或漏报 ;
超声波雷达
超声波雷达 : 是 低速、近距离 泊车助手 ;
- 工作原理 : 通过发射 超声波 并计算回波时间测量距离 ;
- 主要用途 :
- 倒车雷达 : 倒车时探测车后障碍物 ( 如 : 墙壁、花坛 ) , 通过声音 / 仪表盘提示距离 , 避免碰撞 ;
- 自动泊车 : 是绝对的 核心传感器 , 用于 探测车位和周围障碍物 ( 如 :车辆、柱子、马路牙子、护栏 ) ;
- 低速蠕行障碍物预警 : 在 极低速 拥堵路段 , 作为 辅助感知 提醒驾驶员 ;
- 低速挪车 : 车主通过手机 APP 远程挪车时 , 超声波雷达 实时监测周边近距离障碍 , 确保低速挪车安全 ;
- 开门预警 ( DOW ) : 部分系统 利用 超声波雷达 探测后方接近的车辆或自行车 , 防止开门碰撞 ;
- 近距离障碍物检测 : 作为最后的安全防线 , 检测 毫米波雷达 和 摄像头 可能遗漏的近距离障碍物 ;
- 技术优势 :
- 成本极低 : 是所有感知传感器中 最便宜 的 ;
- 近距离精度高 : 在 0-5 米 范围内 , 测距精度可达厘米级 ;
- 不受物体颜色和材质影响 : 只要是 有形的物体 , 都能有效探测 ;
- 对光照和天气不敏感 : 不受白天黑夜、雨雪影响 , 但强风有影响 ;
- 技术劣势 :
- 探测距离极短 : 有效范围通常小于 5 米 , 完全无法用于行车场景 ;
- 探测角度窄 : 单个传感器视野有限 , 需要 多个传感器覆盖 ;
- 速度慢 : 声波传播速度慢 , 刷新率低 , 无法应对高速行驶 ;
- 易受环境干扰 : 温度、风速等会影响其精度 , 吸音材料 ( 如 : 绒布 ) 或 小物体 ( 如 : 细杆 ) 可能 导致探测失败 ;
- 仅提供一维距离信息 : 无法直接提供高度或宽度信息 ;
激光雷达 、 毫米波雷达 、 超声波雷达 基本参数对比
| 参数维度 | 激光雷达 | 毫米波雷达 | 超声波雷达 |
|---|---|---|---|
| 角色定位 | 高阶自动驾驶核心传感器、高精度3D环境建模者、车辆的 " 精密眼睛 " | 全天候测速测距主力、车辆的"可靠哨兵" | 近距离泊车助手、车辆的"灵敏触须" |
| 工作介质 | 激光(红外光波段) | 毫米波(电磁波,通常24GHz, 77GHz) | 超声波(声波) |
| 探测距离 | 中远距 • 主流:0.2 - 150m • 高端:>250m | 远距 • 长距雷达:1 - 250m+ • 中短距角雷达:1 - 80m | 极近距 • 典型:0.1 - 5m • 少数可达10m |
| 探测精度 | 极高 • 距离精度:厘米级 (±2cm) | 高 • 距离精度:0.1 - 0.5m • 速度精度极高:±0.1km/h | 近距极高 • 距离精度:厘米级 (±1-5cm) |
| 探测分辨率 | 极高 • 角分辨率:0.1° - 0.5° • 可生成高密度3D点云 | 较低 → 中 • 传统:角分辨率1°-5°("点"目标) • 4D成像雷达:大幅提升至0.1°-1° | 低 • 波束角大,分辨率低,无法分辨细节 |
| 速度测量 | 间接测量 通过多帧点云数据差分计算 | 直接精确测量 利用多普勒效应,直接输出径向速度 | 间接测量 通过多帧距离数据差分计算,刷新率低 |
| 物体识别能力 | 极强 • 可识别物体具体轮廓、类别、甚至姿态(如行人、车辆、骑行者) | 中等 • 传统:难以识别轮廓,擅长检测"点"目标并测速 • 4D成像雷达:可初步分类(车、人、大型动物) | 无 • 仅能探测到障碍物存在和距离,无法识别物体类型 |
| 环境适应性 | 差 • 受雨、雪、雾、尘、强光影响严重,性能急剧下降 | 极强 • 全天候工作,穿透力强,几乎不受恶劣天气影响 | 一般 • 受温度、风速、气压变化影响,嘈杂声学环境有干扰 |
| 数据量 | 极大 • 每秒生成百万级点云数据,对计算平台要求高 | 小 → 中 • 传统雷达数据量小 • 4D成像雷达数据量显著增加 | 极小 • 仅返回几个通道的距离值 |
| 成本 | 高 • 机械式:高昂 • 半固态/固态:成本快速下降,但仍较高 | 中 • 技术成熟,已大规模量产,性价比高 | 极低 • 技术简单,成本极其低廉,已大规模标配 |
| 主要优势 | 超高分辨率、3D建模、精准定位 | 直接测速、全天候工作、穿透性强、成本效益高 | 近距精度高、成本极低、不受物体材质颜色影响 |
| 主要劣势 | 成本高、恶劣天气性能差、无法直接测速 | 传统产品分辨率低、识别能力弱、对静止物体杂波过滤难 | 探测距离短、速度慢、易受环境干扰、仅适用于低速 |
| 自动驾驶应用场景 | • L3+高级别自动驾驶核心传感器 • 高精地图定位与匹配 • 障碍物精准识别与分类 • 城市NGP、高速领航 | • ADAS核心 & 自动驾驶必备传感器 • 自适应巡航 • 自动紧急制动 • 盲区监测 & 变道辅助 • 交叉路口辅助(防横向碰撞) | • 低速场景专属 • 自动泊车 • 倒车辅助 • 低速拥堵跟车辅助(蠕行) |