本文主要内容为YOLO 模型在本地、嵌入式、移动端三大主流平台的部署方案,核心是根据不同平台的硬件特性、性能需求,选择适配的模型格式、推理框架和优化策略(以 YOLOv8 为例,v5 通用,兼顾部署效率与精度平衡)。
核心部署逻辑
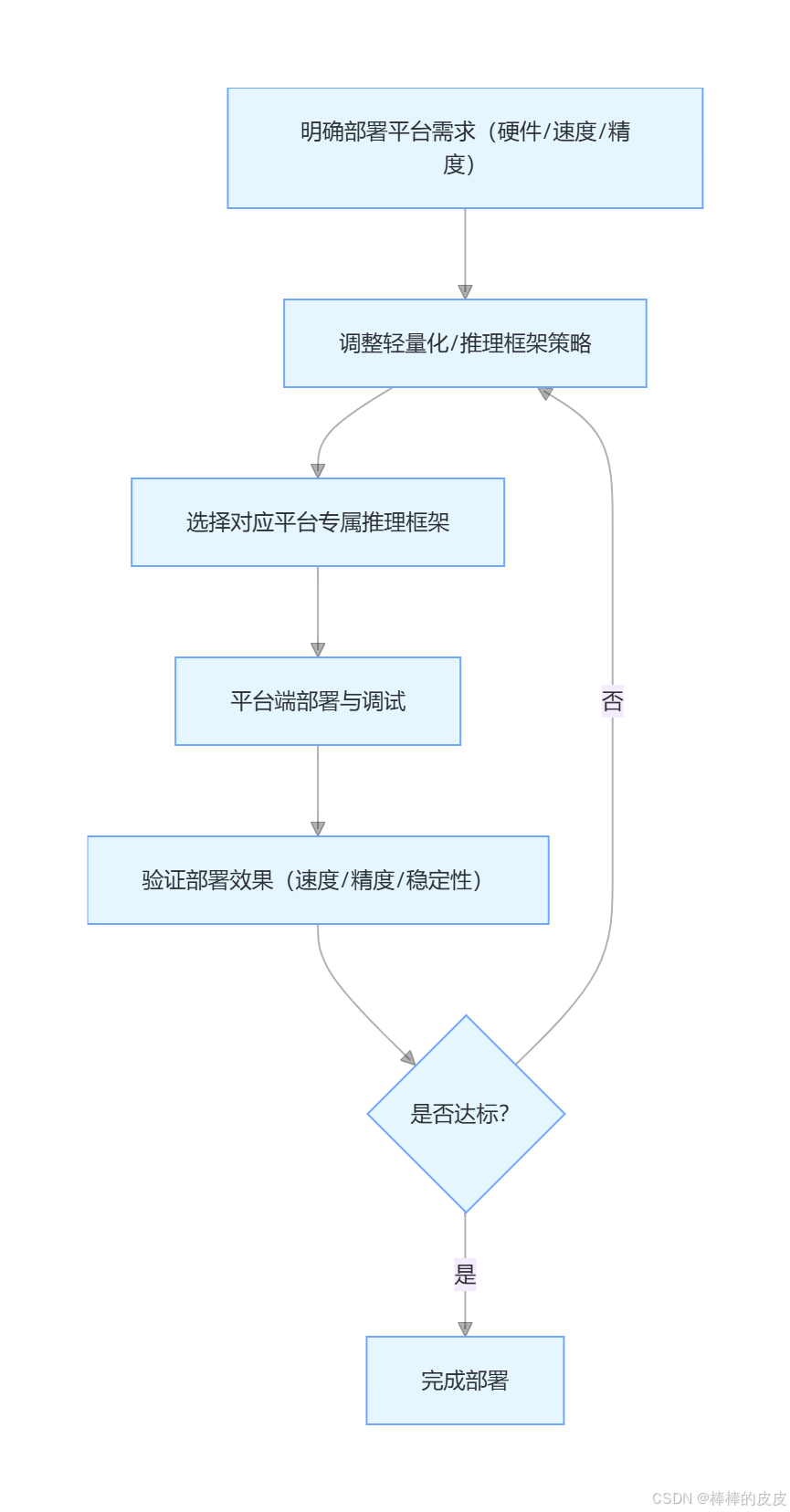
不同平台的硬件算力、存储资源、实时性要求差异显著,部署需遵循 "平台适配优先、轻量化先行、精度损失可控(≤3%)" 的原则,核心流程如下:
一、 本地部署(桌面 / 服务器,最高优先级,最易落地)
本地部署主要针对Windows/Linux 桌面端、云服务器 / 本地服务器 ,硬件通常具备较强算力(Intel/AMD 多核 CPU、NVIDIA 中高端 GPU),核心需求是平衡速度与精度、部署流程简单、易于调试。
1. 核心部署方案(按优先级排序)
方案 1:Ultralytics 原生部署(最简单,快速验证,推荐入门)
YOLOv8 官方提供的ultralytics库支持一键推理,无需额外转换模型格式,适合快速验证模型效果、非生产环境部署。
-
适用场景:快速测试、桌面端演示、非实时性批量推理
-
硬件要求:CPU(≥4 核)、GPU(NVIDIA ≥6G 显存,可选)
-
实操步骤 :
-
安装依赖(已安装可跳过):
pythonpip install ultralytics opencv-python -
一键推理(命令行 / Python 代码):
-
命令行(快速便捷):
python# CPU推理 yolo detect predict model=runs/detect/train/weights/best.pt source=test.jpg save=True # GPU推理(指定device=0,需安装CUDA/cuDNN) yolo detect predict model=runs/detect/train/weights/best.pt source=test.jpg device=0 save=True -
Python 代码(便于二次开发):
pythonfrom ultralytics import YOLO # 加载模型 model = YOLO("runs/detect/train/weights/best.pt") # 推理(CPU/GPU自动适配,有GPU优先使用GPU) results = model.predict( source="test.jpg", # 输入源(图片/视频/文件夹) imgsz=640, # 输入尺寸 conf=0.3, # 置信度阈值 iou=0.45, # NMS IoU阈值 save=True # 保存预测结果 )
-
-
-
部署效果:GPU(RTX 3060)FPS≈60-100,CPU(i7-12700H)FPS≈10-20,精度无损失,部署成本为 0。
方案 2:ONNX + ONNX Runtime 部署(平衡速度 / 易用性,推荐生产环境)
将.pt模型转换为 ONNX 格式,使用 ONNX Runtime 推理,速度较原生部署提升 20%-30%,支持跨平台(Windows/Linux/macOS),适合生产环境桌面端 / 服务器部署。
-
适用场景:生产环境桌面端、通用服务器、批量推理
-
硬件要求:CPU(≥4 核)、GPU(NVIDIA ≥6G 显存,可选)
-
实操步骤 :
-
导出 ONNX 模型:
python# 导出FP32格式(精度无损失),支持GPU/CPU yolo export model=best.pt format=onnx imgsz=640 # 导出FP16格式(速度更快,精度损失≤1%),仅支持GPU yolo export model=best.pt format=onnx imgsz=640 half=True device=0 -
安装 ONNX Runtime 依赖:
python# CPU版本 pip install onnxruntime opencv-python # GPU版本(需安装CUDA 11.6+) pip install onnxruntime-gpu opencv-python -
ONNX Runtime 推理代码:
pythonimport cv2 import onnxruntime as ort import numpy as np # 1. 预处理(YOLOv8要求) def preprocess(img_path, imgsz=640): img = cv2.imread(img_path) h, w, c = img.shape # 缩放至输入尺寸,保持长宽比,填充黑边 scale = min(imgsz/w, imgsz/h) new_w, new_h = int(w*scale), int(h*scale) resized_img = cv2.resize(img, (new_w, new_h), interpolation=cv2.INTER_LINEAR) # 构建输入图片(黑边填充) input_img = np.zeros((imgsz, imgsz, 3), dtype=np.uint8) input_img[:new_h, :new_w, :] = resized_img # 转换格式:BGR→RGB,HWC→CHW,归一化到[0,1],添加批次维度 input_img = cv2.cvtColor(input_img, cv2.COLOR_BGR2RGB) input_img = input_img.transpose(2, 0, 1).astype(np.float32) / 255.0 input_img = np.expand_dims(input_img, axis=0) return input_img, img, scale, (new_w, new_h) # 2. 加载ONNX模型并推理 onnx_path = "best.onnx" sess = ort.InferenceSession(onnx_path, providers=["CUDAExecutionProvider", "CPUExecutionProvider"]) input_name = sess.get_inputs()[0].name # 3. 推理与后处理 input_img, raw_img, scale, (new_w, new_h) = preprocess("test.jpg") outputs = sess.run(None, {input_name: input_img}) # 4. 解析结果(简化版,完整解析可参考ultralytics官方代码) print("推理完成,输出结果形状:", outputs[0].shape)
-
-
部署效果:GPU(RTX 3060)FPS≈80-130,CPU(i7-12700H)FPS≈15-30,精度损失≤1%(FP16)。
方案 3:TensorRT 部署(NVIDIA GPU 极致提速,推荐高性能服务器)
将模型转换为 TensorRT 引擎(.engine格式),最大化 NVIDIA GPU 算力,速度较 ONNX 提升 50%-100%,适合对实时性要求高的服务器部署(如实时监控、视频分析)。
-
适用场景:高性能 NVIDIA GPU 服务器、实时视频分析、低延迟推理
-
硬件要求:NVIDIA GPU(≥6G 显存,支持 TensorRT,如 RTX 30 系列 / 40 系列、Tesla T4/V100)
-
实操步骤 :
-
安装 TensorRT(需对应 CUDA 版本,参考 NVIDIA 官方文档)
-
导出 TensorRT 引擎:
python# 直接导出.engine格式(YOLOv8一键支持) yolo export model=best.pt format=engine imgsz=640 device=0 half=True -
TensorRT 推理(基于
ultralytics封装,简化开发):pythonfrom ultralytics import YOLO # 加载TensorRT引擎模型 model = YOLO("best.engine") # GPU推理(极致速度) results = model.predict( source="test.mp4", # 视频输入,支持实时流 imgsz=640, conf=0.3, device=0, stream=True # 开启流式推理,降低延迟 ) # 遍历流式结果 for result in results: boxes = result.boxes print("检测框:", boxes.xyxy)
-
-
部署效果:GPU(RTX 3060)FPS≈150-200,GPU(Tesla T4)FPS≈200-300,精度损失≤2%(FP16/INT8)。
2. 本地部署核心优化与避坑
- GPU 优先:有 NVIDIA GPU 时,优先选择 ONNX Runtime GPU/ TensorRT,速度提升显著;
- 格式选择 :快速测试用
.pt,生产环境 CPU 用 ONNX,GPU 用 TensorRT; - 批量推理 :批量处理图片 / 视频帧时,设置
batch=16/32,提升推理效率; - 避坑 :导出 ONNX/TensorRT 时,确保
imgsz为 32 的倍数,否则会导致推理错误。
二、 嵌入式部署(Jetson / 树莓派,边缘计算核心)
嵌入式部署主要针对NVIDIA Jetson 系列(Nano/Xavier/Orin)、树莓派、嵌入式 Linux 开发板 ,硬件算力有限、存储资源紧张,核心需求是轻量化模型、低功耗、满足边缘实时性(≥15FPS)。
1. 主流嵌入式平台部署方案
平台 1:NVIDIA Jetson 系列(推荐,算力较强,易部署)
Jetson 系列(Nano/Xavier NX/Orin NX)内置 CUDA/TensorRT 支持,适配 YOLO 模型,是边缘计算的首选,核心采用 "YOLOv8n + TensorRT INT8" 部署方案。
-
适用场景:边缘实时监控、机器人视觉、智能安防
-
硬件要求:Jetson Nano(4G 显存)、Jetson Xavier NX(8G 显存)、Jetson Orin NX(16G 显存)
-
实操步骤 :
-
准备环境:刷入 JetPack 系统(自带 CUDA/TensorRT/OpenCV)
-
模型轻量化:选择 YOLOv8n,导出 TensorRT INT8 引擎(节省显存,提升速度):
python# Jetson Nano/Xavier 一键导出INT8 TensorRT引擎 yolo export model=yolov8n.pt format=engine imgsz=480 device=0 int8=True data=data.yaml -
推理部署(与服务器 TensorRT 部署一致,简化代码):
pythonfrom ultralytics import YOLO # 加载轻量化TensorRT引擎 model = YOLO("yolov8n.engine") # 边缘实时推理(低功耗模式) results = model.predict( source=0, # 外接摄像头 imgsz=480, conf=0.3, device=0, save=False # 关闭保存,降低存储占用 )
-
-
部署效果 :
- Jetson Nano:FPS≈15-20(YOLOv8n + INT8),精度损失≤3%,功耗≤5W;
- Jetson Xavier NX:FPS≈50-80(YOLOv8n + INT8),精度损失≤3%,功耗≤10W。
平台 2:树莓派(低成本,算力有限,入门级)
树莓派(4B/5B)算力较弱(ARM CPU / 集成显卡),无 CUDA 支持,核心采用 "YOLOv8n + OpenVINO + INT8" 部署方案。
-
适用场景:低成本边缘演示、简单视觉检测、非实时性场景
-
硬件要求:树莓派 4B(8G 内存)、树莓派 5B(8G 内存)、外接摄像头 / USB 摄像头
-
实操步骤 :
-
准备环境:安装 Raspberry Pi OS,安装 OpenVINO:
pythonpip install openvino-dev ultralytics opencv-python -
模型转换:导出 OpenVINO 格式(INT8 量化,降低计算量):
pythonyolo export model=yolov8n.pt format=openvino imgsz=480 int8=True data=data.yaml -
OpenVINO 推理(适配 ARM CPU,开启多线程):
pythonfrom openvino.runtime import Core import cv2 import numpy as np # 加载OpenVINO模型 core = Core() model = core.read_model("yolov8n_openvino_model.xml") compiled_model = core.compile_model(model, "CPU") # 适配树莓派ARM CPU input_layer = compiled_model.input(0) # 摄像头实时推理(开启多线程,提升速度) cap = cv2.VideoCapture(0) cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) while cap.isOpened(): ret, frame = cap.read() if not ret: break # 预处理(与ONNX一致,简化版) input_img = cv2.resize(frame, (480, 480)) input_img = cv2.cvtColor(input_img, cv2.COLOR_BGR2RGB) input_img = input_img.transpose(2, 0, 1).astype(np.float32) / 255.0 input_img = np.expand_dims(input_img, axis=0) # 推理(多线程加速) results = compiled_model([input_img]) # 显示帧(简化版) cv2.imshow("Raspberry Pi YOLO Detection", frame) if cv2.waitKey(1) & 0xFF == ord('q'): break cap.release() cv2.destroyAllWindows()
-
-
部署效果:树莓派 5B(8G):FPS≈10-15(YOLOv8n + INT8),精度损失≤3%,功耗≤3W。
2. 嵌入式部署核心优化与避坑
- 模型极致轻量化:优先选择 YOLOv8n,输入尺寸调整为 480/320(32 的倍数),降低计算量;
- INT8 量化必开:嵌入式平台存储 / 算力有限,INT8 量化可减少 75% 模型体积,提升 50% 以上速度;
- 低功耗优化 :Jetson 系列开启
jetson_clocks(性能模式)或nvpmodel(低功耗模式),平衡速度与功耗; - 避坑:树莓派无 CUDA 支持,避免使用 TensorRT 格式,优先选择 OpenVINO/TFLite。
三、 移动端部署(Android/iOS,端侧智能核心)
移动端部署主要针对Android(手机 / 平板)、iOS(iPhone/iPad) ,硬件为 ARM 架构 CPU/GPU、神经网络处理器(NPU),核心需求是超轻量化模型、低延迟、低功耗、适配移动端生态。
1. Android 部署(主流,开源生态完善,推荐)
Android 部署核心采用 "YOLOv8n + TFLite INT8 + NNAPI" 方案,利用 TFLite 适配移动端,NNAPI 调用设备 NPU/GPU 加速,支持离线推理。
-
适用场景:手机 APP 视觉检测、移动端智能扫码、端侧隐私保护(数据不上云)
-
硬件要求:Android 8.0+,支持 NNAPI,配备 NPU/GPU(如骁龙 8 系、天玑 9 系)
-
实操步骤 :
-
模型转换:导出 TFLite INT8 格式(YOLOv8 一键支持):
pythonyolo export model=yolov8n.pt format=tflite imgsz=320 int8=True data=data.yaml -
移动端集成(基于 Android Studio,Java/Kotlin):
-
步骤 1:将
yolov8n.tflite放入app/src/main/assets目录; -
步骤 2:添加 TFLite 依赖(
build.gradle):javadependencies { // TFLite核心依赖 implementation 'org.tensorflow:tensorflow-lite:2.15.0' // TFLite NNAPI加速依赖 implementation 'org.tensorflow:tensorflow-lite-support:0.4.4' implementation 'org.tensorflow:tensorflow-lite-gpu:2.15.0' } -
步骤 3:编写 TFLite 推理代码(简化版,Java):
javaimport org.tensorflow.lite.Interpreter; import java.io.FileInputStream; import java.nio.MappedByteBuffer; import java.nio.channels.FileChannel; // 加载TFLite模型 private MappedByteBuffer loadModelFile(AssetManager assetManager, String modelPath) throws IOException { AssetFileDescriptor fileDescriptor = assetManager.openFd(modelPath); FileInputStream inputStream = new FileInputStream(fileDescriptor.getFileDescriptor()); FileChannel fileChannel = inputStream.getChannel(); long startOffset = fileDescriptor.getStartOffset(); long declaredLength = fileDescriptor.getDeclaredLength(); return fileChannel.map(FileChannel.MapMode.READ_ONLY, startOffset, declaredLength); } // 初始化推理器(开启NNAPI加速) Interpreter.Options options = new Interpreter.Options(); options.setUseNNAPI(true); // 调用设备NPU/GPU加速 Interpreter tflite = new Interpreter(loadModelFile(getAssets(), "yolov8n.tflite"), options); // 后续:图像预处理、推理、后处理(参考YOLOv8 TFLite官方文档)
-
-
-
部署效果:骁龙 8 Gen 2:FPS≈25-35(YOLOv8n + INT8),精度损失≤3%,功耗低,支持离线运行。
2. iOS 部署(闭源生态,适配苹果设备)
iOS 部署核心采用 "YOLOv8n + Core ML + INT8" 方案,利用 Core ML 适配苹果生态,调用 Apple Neural Engine(ANE)加速,支持离线推理、隐私保护。
-
适用场景:iOS APP 视觉检测、iPhone/iPad 端智能分析、苹果生态闭环应用
-
硬件要求:iOS 13.0+,配备 ANE(iPhone 8+/iPad Pro 2018+)
-
实操步骤 :
-
模型转换:导出 Core ML 格式(YOLOv8 一键支持):
pythonyolo export model=yolov8n.pt format=coreml imgsz=320 int8=True data=data.yaml -
移动端集成(基于 Xcode,Swift/Objective-C):
-
步骤 1:将
yolov8n.mlmodel拖入 Xcode 项目,勾选 "Add to targets"; -
步骤 2:编写 Core ML 推理代码(简化版,Swift):
Swiftimport CoreML import Vision // 加载Core ML模型 guard let model = try? VNCoreMLModel(for: yolov8n().model) else { fatalError("加载模型失败") } // 配置视觉请求 let request = VNCoreMLRequest(model: model) { request, error in guard let results = request.results as? [VNRecognizedObjectObservation] else { return } // 解析检测结果 for result in results { print("检测框:\(result.boundingBox),置信度:\(result.confidence)") } } // 处理摄像头帧(简化版) let handler = VNImageRequestHandler(ciImage: CIImage(image: UIImage(named: "test.jpg")!), options: [:]) try? handler.perform([request])
-
-
-
部署效果:iPhone 15 Pro:FPS≈30-40(YOLOv8n + INT8),精度损失≤3%,功耗低,支持离线运行。
3. 移动端部署核心优化与避坑
- 超轻量化模型:仅选择 YOLOv8n,输入尺寸调整为 320/256(32 的倍数),最小化计算量;
- INT8 量化必开:移动端存储 / 算力有限,INT8 量化是实现流畅运行的关键;
- 离线推理优先:移动端优先选择 TFLite/Core ML 离线模型,避免网络依赖,保护用户隐私;
- 避坑 :
- Android:不同厂商 NPU 适配差异大,需多设备测试,优先使用 NNAPI 自动适配;
- iOS:Core ML 模型需在 Xcode 中进行 "模型编译",支持 ANE 加速,避免直接运行未编译模型。
四、 三大平台部署对比与选型指南
| 部署平台 | 核心方案 | 优势 | 劣势 | 适用场景 | 精度损失 | 推荐模型 |
|---|---|---|---|---|---|---|
| 本地(桌面 / 服务器) | YOLOv8s/m + ONNX/TensorRT | 速度快、精度高、易调试、可二次开发 | 功耗高、依赖高性能硬件 | 实时监控、批量推理、视频分析 | ≤2%(TensorRT INT8) | YOLOv8s/m/l |
| 嵌入式(Jetson / 树莓派) | YOLOv8n + TensorRT/OpenVINO | 边缘部署、低延迟、数据不上云、功耗适中 | 算力有限、精度略有损失 | 机器人视觉、智能安防、边缘监控 | ≤3%(INT8) | YOLOv8n |
| 移动端(Android/iOS) | YOLOv8n + TFLite/Core ML | 便携、低功耗、离线运行、隐私保护 | 算力弱、模型限制大、开发复杂度高 | 手机 APP、端侧智能、移动检测 | ≤3%(INT8) | YOLOv8n |
核心选型原则
- 优先看硬件:有 NVIDIA GPU 选 TensorRT,Intel CPU 选 OpenVINO,移动端选 TFLite/Core ML;
- 次优先看需求:实时性要求高选 TensorRT/NNAPI,低成本选树莓派 / YOLOv8n,隐私保护选移动端离线部署;
- 最后看精度:精度要求高选 YOLOv8m/l(本地 / 服务器),精度要求适中选 YOLOv8n(嵌入式 / 移动端)。
总结
核心部署要点
- 平台适配:不同平台选择专属模型格式与推理框架,是部署成功的关键;
- 轻量化先行:嵌入式 / 移动端必须使用 YOLOv8n + INT8 量化,平衡速度与精度;
- 离线优先:生产环境优先选择离线模型(ONNX/TFLite/Core ML),避免依赖第三方库 / 网络;
- 验证落地:每一步部署后,验证速度(FPS)、精度(mAP@0.5)、稳定性,确保满足业务需求。
部署后续工作
- 后处理优化:完善检测结果解析、NMS 优化,提升最终用户体验;
- 性能调优:针对目标设备,微调输入尺寸、置信度阈值,最大化速度 / 精度平衡;
- 批量部署:嵌入式 / 移动端批量部署时,做好模型版本管理、设备适配测试。