中级软考(软件工程师)第三章知识点------数据结构与数据运算
-
- [1. 线性表](#1. 线性表)
-
- [1.1 基础定义](#1.1 基础定义)
- [1.2 存储结构](#1.2 存储结构)
- [2. 栈](#2. 栈)
-
- [2.1 栈的应用场景](#2.1 栈的应用场景)
- [3. 队列](#3. 队列)
-
- [3.1 循环队列](#3.1 循环队列)
- [3.2 双端队列](#3.2 双端队列)
- [3.3 队列常见应用场景](#3.3 队列常见应用场景)
- [3.4 链式队列](#3.4 链式队列)
- [4. 串](#4. 串)
-
- [4.1 空串](#4.1 空串)
- [4.2 子串](#4.2 子串)
-
- [1. 二维数组](#1. 二维数组)
- [2. 三对角矩阵](#2. 三对角矩阵)
-
- [2.1 通过矩阵计算一维数组的下标](#2.1 通过矩阵计算一维数组的下标)
- [2.1 通过一位数组反推三角矩阵的位置](#2.1 通过一位数组反推三角矩阵的位置)
- [3. 树](#3. 树)
- [4. 图](#4. 图)
-
分值占比:大约5分左右
-
题型:单选
-
注意点: 会有部分的扩展内容
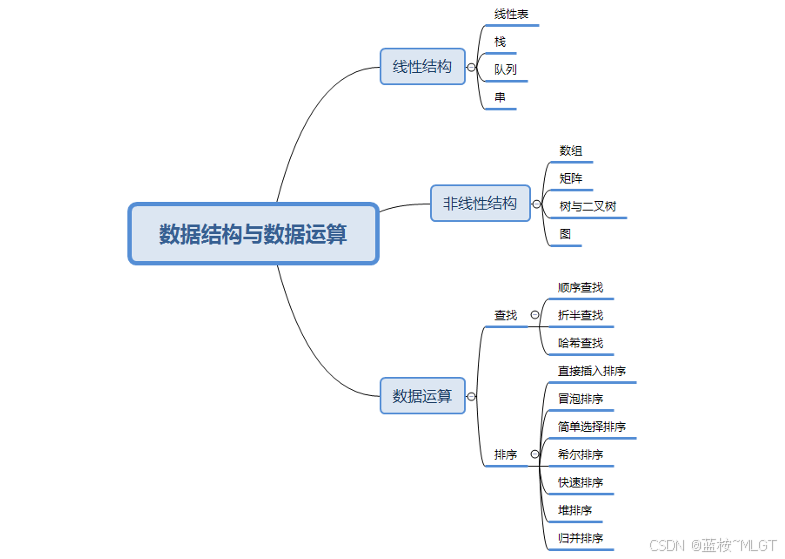
从大纲可以看出大部分都是关于排序和查找,对于有开发经验的同胞们来说理解并不难,只是我们很少将这类知识应用于题目和计算上。
一、线性结构
1. 线性表
1.1 基础定义
- 定义: 最基本的数据结构,一个线性表是由n(n ≥ 0)个元素的
有限集合,通常表示为( a 1 , 1 2 , . . . , a n a_1, 1_2, ... ,a_n a1,12,...,an)。 - 特点:
- 存在唯一的一个称作"第一个"的元素
- 存在唯一的一个称作"最后一个"的元素
- 除第一个元素外,序列中每一个元素都有一个"直接前驱"
- 除最后一个元素外,序列中每一个元素都有一个"直接后继"
1.2 存储结构
(1)顺序存储
- 定义: 用一组
地址连续的存储单元依次存储线性表中的数据元素,从而使得逻辑上相邻的元素在物理上也相邻。 - 优点: 可以
随机存取表中的元素。 - 缺点: 插入与删除都
需要移动元素。

- 常用公式: 假设第一个元素 a 1 a_1 a1的内存地址是 L O C ( a 1 ) LOC(a_1) LOC(a1),每个元素占 L L L个字节,问第 i i i个元素 a i a_i ai的地址是多少?
L O C ( a i ) = L O C ( a 1 ) + ( i − 1 ) x L LOC(a_i)=LOC(a_1)+(i-1)xL LOC(ai)=LOC(a1)+(i−1)xL
这个公式比较好理解,用第一个元素的地址加上除去第一个元素的地址之和即可
(2)链式存储
- 定义: 链式存储通过指
针的链接的节点存储数据元素,也就是在物理意义上并不连续。 - 分类:
单链表,只能存头结点开始顺序遍历整个链表,循环链表(循环单链表、循环双链表),可以从表中的任何一个节点开始遍历整个链表。 - 优点: 插入与删除都
不需要移动元素。 - 缺点:
不能对数据进行随机访问。

(3)时间复杂度对比
| 操作类型 | 顺序表 (数组) | 链表 (单链表) | 备注 |
|---|---|---|---|
| 按值查找 | O(n) | O(n) | 无序情况下都要挨个找 |
| 按序号查找 (读取) | O(1) | O(n) | 顺序表赢麻了 |
| 插入/删除 (已知位置) | O(n) | O(1) | 链表赢麻了 |
| 插入/删除 (未知位置) | O(n) | O(n) | 链表虽然改指针快,但找到位置也要花时间 |
时间复杂度的定义:程序执行次数与数据总量之间的关系。
- O(1) :常数阶 :无论数据量多大,我需要的
次数都是固定的,不会循环。 - O(n) :线性阶 :数据量翻倍,耗时也翻倍,一般都需要通过
循环实现。
📝 上面这两种是线性表和链表中的时间复杂度,后面还会出现几种,我们提前预热一下
- O( l o g n log_n logn) :对数阶 :典型算法是
二分查找,就是对半砍,这样最后算下来的时间复杂度就是 l o g n log_n logn - O( n l o g n nlog_n nlogn) :线性对数阶 :这是
理论上排序算法的极限速度,逻辑是按照分层处理,但是每一层需要处理的元素还是n,所以就是 O ( n ) O(n) O(n)和 O ( l o g n ) O(log_n) O(logn)的时间复杂度之和。(如果纠结这个怎么算出来的可以自行百度,需要用到一些数据知识,鄙人数学比较差) - O( n 2 n^2 n2) :平方阶 :通常就是
两层嵌套循环。 - O(2^n) :指数阶:最慢的,一旦出现计算机就挂了。
(4)单链表、双链表,以及对应循环单/双链表的区别
单链表 vs 双链表
| 比较维度 | 单链表 | 双链表 |
|---|---|---|
| 节点结构 | `[Data | Next]` 只有一个指针,指向后继。 |
| 行走方向 | 单行道。 只能从头走到尾,过了这个村就没这个店。 | 双向车道。 可以前后反复横跳。 |
| 找后继节点 | O(1) | O(1) |
| 找前驱节点 | O(n) 必须从头开始遍历,直到找到 p->next == target。 | O(1) 直接访问 p->prior。 |
| 删除节点 p | O(n) 因为要删除 p,必须修改 p 的前驱节点的 next 指针。单链表找不到前驱,只能重头找。 | O(1) 因为 p 自带前驱指针,直接改就行。 |
| 空间开销 | 小 | 大 (每个节点多存一个指针) |
📝 如果研究过Java的数组部分应该对这部分不陌生,我们只需要记着双链表更加适合随意的删除和新增节点 。有兴趣可以看看我的一篇专门讲Java的集合的文章Java集合
循环单链表 vs 循环双链表
📝 "循环"的核心定义是:最后一个节点的 next 指针不指向 NULL,而是指回 Head(头结点)。
| 比较维度 | 循环单链表 | 循环双链表 |
|---|---|---|
| 结构闭环 | 单向环。 像田径跑道,只能逆时针跑。 | 双向环。 头的前面是尾,尾的后面是头。 |
| 访问尾结点 | O(n) (如果有头指针) 必须转一圈才能摸到屁股。 (注:如果专门维护一个尾指针 rear,则是 O(1)) | O(1) 直接 head->prior 就是尾结点。这是最大的优势。 |
| 遍历终止条件 | p->next == head 跑了一圈回到了起点。 | p->next == head 或 p->prior == head |
| 容错性 | 如果链表断裂,后面的节点全部丢失。 | 即使断了一个方向,还有机会通过反向指针找回(理论上)。 |
💡 针对考试,主要记着下面这几点
- 想省空间? → 单链表。
- 经常要在"当前节点"的前面搞事情(插/删)? → 双链表。
- 需要从任意节点出发都能遍历全表? → 循环链表。
- 既要随便遍历,又要快速找前驱,还要快速找首尾? → 循环双链表(全能王,但费空间)。
2. 栈

📝 栈就不多说了,核心四个字:"后进先出"
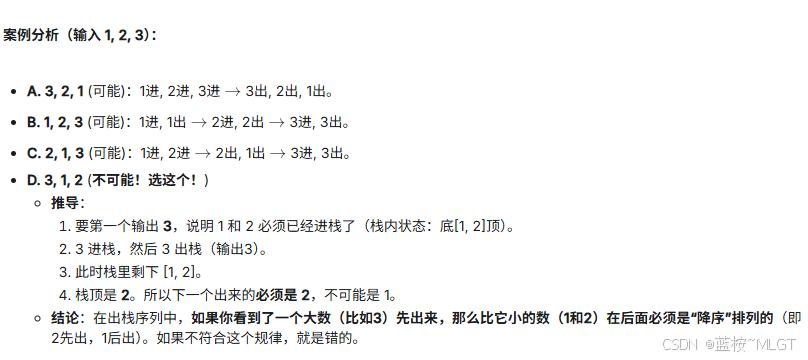
考题:有一个栈,输入序列是 1,2,3(按顺序入栈,但中间随时可以出栈),问:下列哪个出栈序列是不可能的?
2.1 栈的应用场景
- 递归:通常需要通过栈保存每一层的函数变量和返回值,通常在循环中比较容易遇到的就是栈溢出错误。
- 表达式求值
- 括号匹配
3. 队列
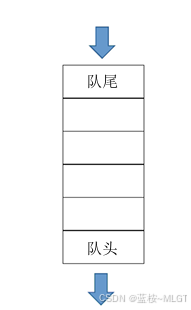
- 定义: 一种"先进先出 "的线性表,在队列中允许插入元素的一端称为队尾 ,允许删除元素的一端称为队头。
3.1 循环队列
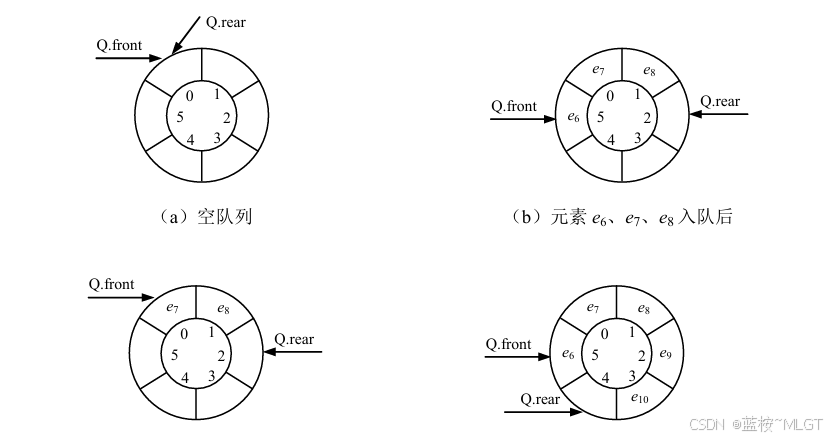
📝 循环队列出现的核心原因是:普通队列的"假溢出"问题,这是重点。
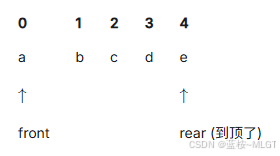
假溢出出现的原因:
分析上面的两种图,第一张是队列满了的情况,第二张是先进入的元素出去了,注意了,此时rear节点并没有改变位置,所以计算机判定还是一个满状态,在插入元素是不是就溢出了呢。
循环队列的解法: 首尾相连!(就不文字解释了,直接上图)
(1)公式一:下标计算
N e x t I n d e x = ( I n d e x + 1 ) 取模 M A X S I Z E NextIndex = (Index + 1) 取模 MAXSIZE NextIndex=(Index+1)取模MAXSIZE
这个公式不难,注意下标加一取模就行了
(2)判空与判满
- 判空:
front == rear,头指针和尾指针相重叠。 - 判满: 牺牲一个存储单元,如果不牺牲就无法判断了,因为和判空会重复。
- 公式:
( r e a r + 1 ) 取模 M A X S I Z E = = f r o n t (rear + 1) 取模 MAXSIZE == front (rear+1)取模MAXSIZE==front
(3)队列长度
L e n g t h = ( r e a r − f r o n t + M A X S I Z E ) 取模 M A X S I Z E Length = (rear - front + MAXSIZE) 取模 MAXSIZE Length=(rear−front+MAXSIZE)取模MAXSIZE
3.2 双端队列
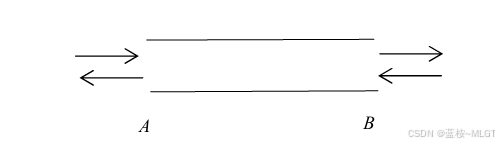
- 定义: 要求进出队列必须要在同一端口。
双端队列的几种变体
- 一端进,两端出
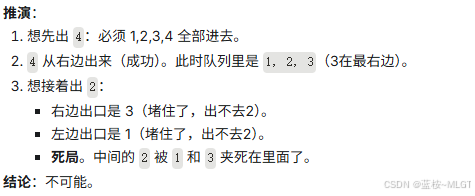
输入序列 1 , 2 , 3 , 4 (从右进)。问:能得到输出序列 4 , 2 , 1 , 3 吗? 输入序列 1, 2, 3, 4(从右进)。问:能得到输出序列 4, 2, 1, 3 吗? 输入序列1,2,3,4(从右进)。问:能得到输出序列4,2,1,3吗?
- 两端进,一端出 :这种比一般的队列灵活,但是只有一端可以出,所以输出受限,但有一个特点就是可以"插队",因为你可以直接放在输出端那头。
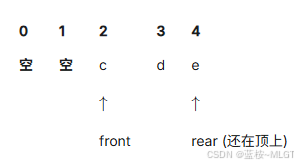
- 双栈模拟队列: 就是最开始的图,这种的场景主要是在一块连续的内存中存入两个栈,栈1往右存(地址变大),栈2往左存(地址变小),直到两个栈碰头(溢出)就说明满了,就是
Top + 1 == Top2。优势就是非常节省内存,没浪费。 - 标准双端队列:
- 结构: 两端随便进,随便出。
- 能力: 最强,包含了栈和队列的所有功能。
3.3 队列常见应用场景
- 广度优先搜索(BFS)
- 缓冲区(Buffer)
- 操作系统调度(先来先服务FCFS)
3.4 链式队列
📝 这一部分我只能说,背一个代码就行,其它的想了解了解一下,通常在C的填空那儿出现。
c
p = Q.front->next; // p 指向第一个真实数据
Q.front->next = p->next; // 此时 front 指向了 p 的下一个(可能是NULL)
// 【关键判别】如果删掉的这个节点(p)就是队尾节点(rear)
// 说明删完队列就空了
if (Q.rear == p) {
Q.rear = Q.front; // 【必考点】必须把 rear 拉回来指向头结点!
}
free(p);4. 串
📝 串是一种线性表,一般为 s = " a 1 , a 2 . . . a n " s="a_1,a_2...a_n" s="a1,a2...an",其中(n > 0)
4.1 空串
- 定义: 长度为0的串。
- 符号: ∅ ∅ ∅ 或 ""。
- 特点: 啥都没有。
- 考点:
空串是任意串的子串。
注意要区别空格串,空格串的长度不为0,只是内容为空格,但实际还是没有什么意义。
4.2 子串
- 定义: 主串中任意长度的连续字符序列。
- 特点: 连续!
- 子串的计算公式:
子串总数 = n ( n + 1 ) / 2 + 1 ( 最后的 1 是空串 ) 子串总数=n(n+1)/2 + 1(最后的1是空串) 子串总数=n(n+1)/2+1(最后的1是空串)
二、非线性结构
1. 二维数组
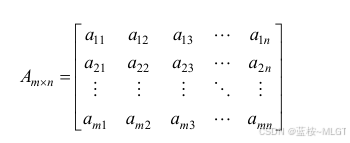
- 数据元素数目固定。
- 数据元素具有相同的类型。
- 数据元素的下标具有上下界约束且下标有序。
这个我们不陌生,唯一需要记住的就是两个计算存储地址的公式。
题目 :假设每个元素占用L个单元,m和n分别为数组的行数和列数, L o c ( a 11 ) Loc(a_{11}) Loc(a11)表示元素 a 11 a_{11} a11的地址。
- 以
列为主序优先:
L o c ( a i j ) = L o c ( a 11 ) + ( ( j − 1 ) × m + ( i − 1 ) ) × L Loc(a_{ij}) = Loc(a_{11}) + ((j-1) \times m + (i-1)) \times L Loc(aij)=Loc(a11)+((j−1)×m+(i−1))×L
- 公式解析:只需要计算出元素之前跳过了多少个元素,那么以列为朱序
- 我们要先计算跳过了多少列:j-1
- 每一列一共有m行,所以跳过了 (j - 1) * m 个
- 然后当前列还有之前的 i - 1 个,所以这个公式就不攻自破了- 以
行为主序优先:
L o c ( a i j ) = L o c ( a 11 ) + ( ( i − 1 ) × n + ( j − 1 ) ) × L Loc(a_{ij}) = Loc(a_{11}) + ((i-1) \times n + (j-1)) \times L Loc(aij)=Loc(a11)+((i−1)×n+(j−1))×L
2. 三对角矩阵
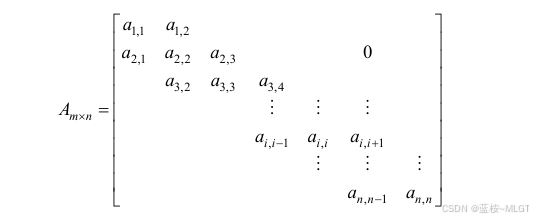
📝 这是一张关于特殊矩阵压缩存储的经典例子,关于这个我们需要理解两个公式,不一定要背。
- 定义: 中间那条线和上下两条线的数据是非0的,其余都是0。
- 带状分布: 所有非0元素下标都满足 ∣ i − j ∣ < = 1 |i - j| <= 1 ∣i−j∣<=1
2.1 通过矩阵计算一维数组的下标
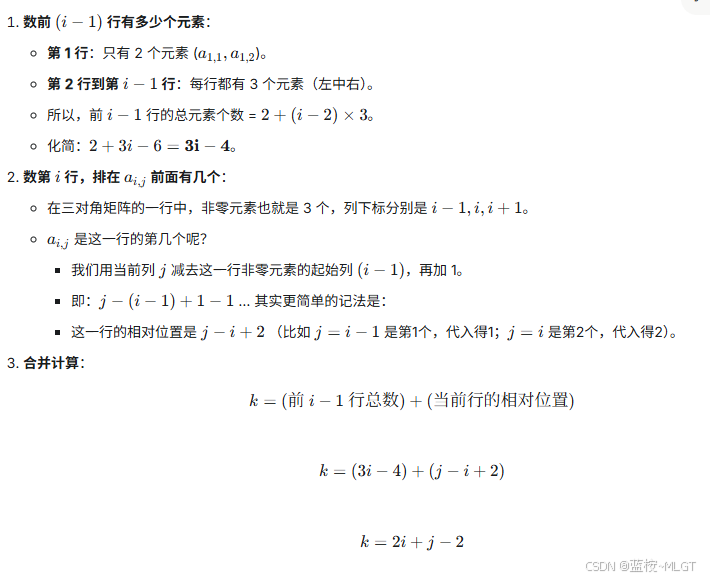
2.1 通过一位数组反推三角矩阵的位置
📝 其实这个更复杂,建议是不记公式,直接带入选项计算即可。
i = ( k + 1 ) / 3 + 1 i = (k + 1) / 3 + 1 i=(k+1)/3+1
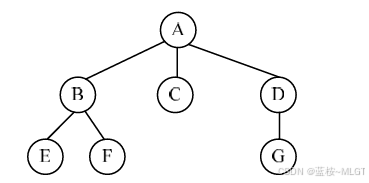
3. 树
⚠️ 这是知识点最多的一小节,也是最常考的。
📝 树是n个(n >= 0)节点的有限集合,有且仅有一个根节点,当n = 0 时称为空树。
3.1 树的基本概念
- 双亲、孩子和兄弟:子节点就是一个节点的子树,双亲节点(一般叫父节点)是子树的根节点,兄弟节点就是平级的节点。
节点的度: 一个节点拥有子树(子节点)的个数称为该节点的度。比如图中A的度就是3。树的度: 树中所有节点度的最大值。叶子结点: 度为0的节点,没有任何子节点。- 内部节点: 排除叶子结点和根节点,其余都是内部节点。
- 节点的层次: 也就是层级,A是第一层,B、C、D是第二层,依此类推。
树的深度: 最大层数,也可以叫高度。路径长度: 两个节点之间经过的边的数目。- 有序 / 无序 树: 如果子树依次从左到右排序且不能变换位置就是有序树,反之则是无序树。
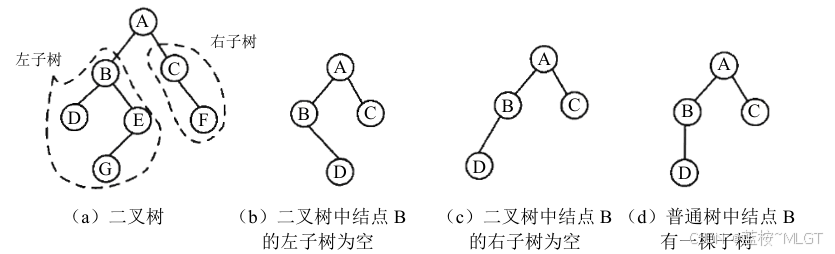
3.2 二叉树
📝 二叉树和普通树的区别在于,二叉树的子树分为左子树和右子树,而普通树只有一颗子树。
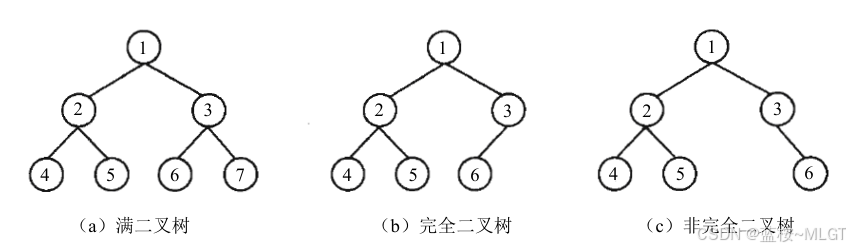
3.3 满二叉树和完全二叉树
📝 记着,满二叉树的节点总数为 2 k − 1 2^k - 1 2k−1
3.4 二叉树的性质
- 二叉树的第 i i i层上最多有 2 i − 1 2^{i-1} 2i−1个结点(i >= 1)
- 深度为k的二叉树最多有 2 k − 1 2^k - 1 2k−1个节点 (k >= 1)
- 对于任何一颗二叉树,如果叶子节点数为 n 0 n_0 n0,度为2的节点数为 n 2 n_2 n2,则 n 0 = n 2 + 1 n_0 = n_2 + 1 n0=n2+1(⚠️ 重点)
- 具有n个结点的万全二叉树的深度为 l o g 2 n + 1 log_2n + 1 log2n+1
- 如果对一颗有n个结点的万全二叉树的节点按照层序编号,则对任一节点i( 1 < = i < = n 1 <= i <= n 1<=i<=n)有:
- 如果i = 1,则该节点是二叉树的根,无双亲;如果i > 1,则该节点是 i / 2 i / 2 i/2。
- 如果2i≤n,则该结点左子树的编号是2i;否则,无左子树。
- 如果2i+1≤n,则该结点右子树的编号是2i+1;否则,无右子树
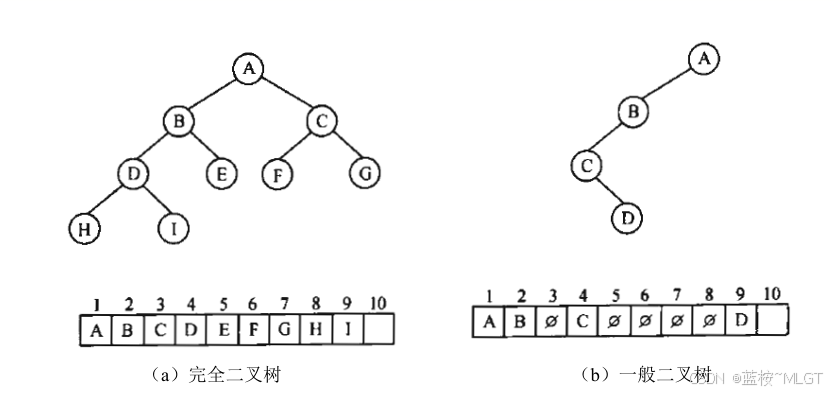
3.5 二叉树的存储结构
(1)顺序存储
📝 这种存储方式万全二叉树是有优势的,因为节点都是满的,而一般二叉树还需要填充空节点,导致空间浪费。
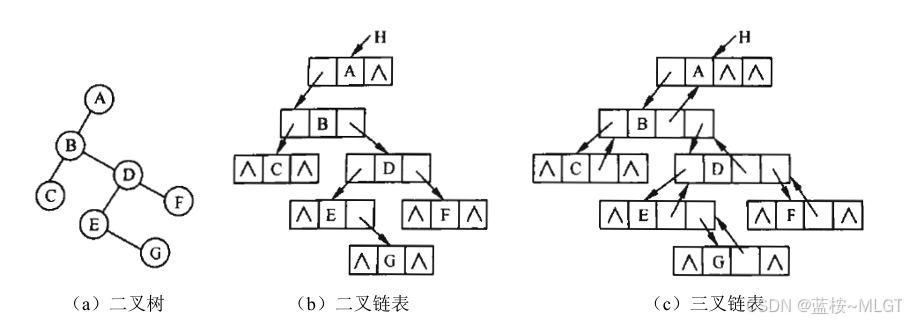
(2)链式存储
📝 一般分为二叉链表和三叉链表。
链表
c
struct TreeNode {
int data; // 数据域
struct TreeNode *lchild; // 左指针
struct TreeNode *rchild; // 右指针
};- 空指针问题
- 具有n个结点的二叉链表中,一共有 2 n 2n 2n个指针域
- 其中有 n − 1 n - 1 n−1个指针指向了孩子(也就是 n − 1 n - 1 n−1条边)
- 剩下的 2 n − ( n − 1 ) = n + 1 2n - (n - 1) = n + 1 2n−(n−1)=n+1个空指针域(NULL),线索二叉树就是用这些空指针存放前驱后继信息的(优点类似红黑树)。
3.6 二叉树的遍历
📝 还记得之前说的那个后序遍历吗,这里了解完整的几种遍历方式。
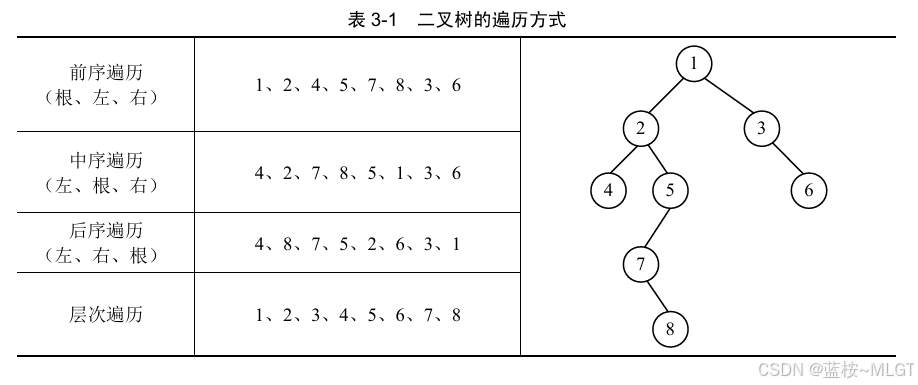
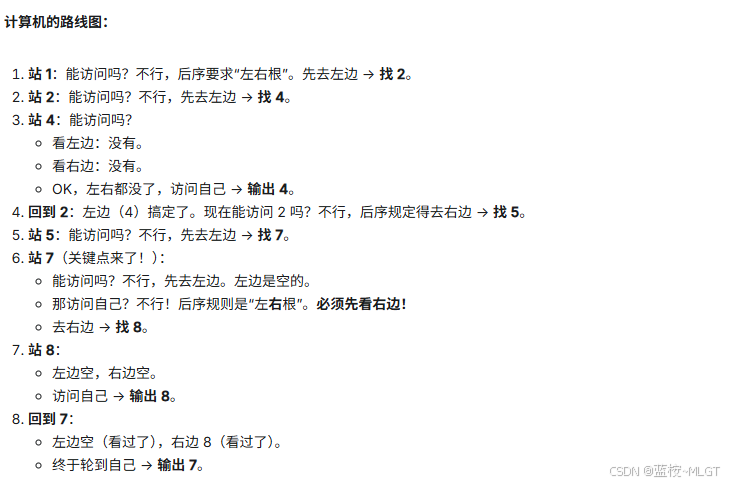
如果忘记怎么遍历的,看下面的线路图,有时候我们不能按照我们视觉上的左中右来理解二叉树,得按照计算机思维,下面用后序遍历来说
3.7 最优二叉树(哈夫曼树)
📝 一种带权路径长度最短的二叉树
- 路径长度:从树根到每一个结点的路径长度之和。
- 带权路径长度 (WPL, Weighted Path Length):结点权值 × 结点到根的距离(层数-1)。
- 定义:WPL 最小的二叉树就是哈夫曼树。
4. 图
📝 图是由集合 V V V和 E E E构成的二元组,记作 G = ( V , E ) G=(V,E) G=(V,E),其中 V V V是图中顶点的非空有限集合, E E E是图中边的非空有限集合。

4.1 图的存储结构
(1)邻接矩阵
📝 具体定义就不描述了,比较抽象,我们直接看图理解
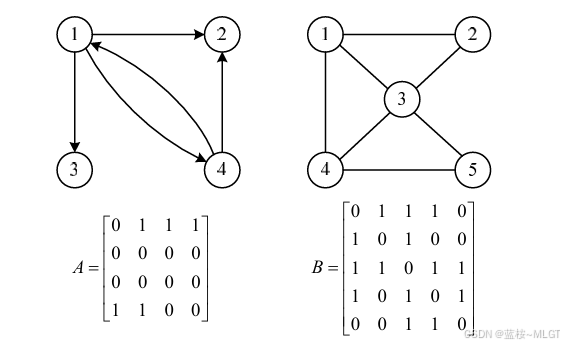
- 规则:
- A i j = 1 Aij = 1 Aij=1:表示顶点 i i i到顶点 j j j有边。
- A i j = 0 Aij = 0 Aij=0:表示没边。
拿矩阵A来说,第一个元素是11,没有边,第二个是12,表示1------2,看图是有边的,依此类推即可。
- 无向图 :矩阵是对称的,第 i i i行的所有元素之和 = 顶点 i i i的度。(度就是有几根线)
- 有向图 :不一定对称,出度 看行,也就是看对应的顶点射出去了几根线。入度看列,看顶点被射中了几次。
- 优点: 查询很快,直接看矩阵对应的值即可,时间复杂度 O ( 1 ) O(1) O(1)
- 缺点: 费空间,咋滴都得有一个 N x N N x N NxN的矩阵
(2)邻接表
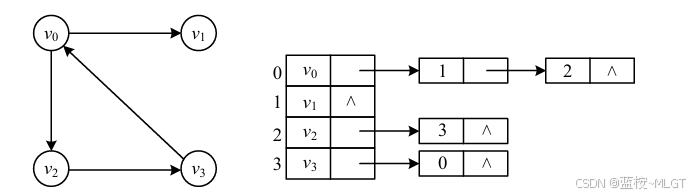
📝 采用数组+链表的形式,数组存储所有的节点,链表存储出度的节点,相当于边。
- 优点:
- 节省空间: 有多少边就申请多少空间,适合稀疏图
- 计算出度快: 直接遍历对应节点的链表即可
- 缺点:
- 计算出度稍微慢一点,要遍历整个链表,不像矩阵直接计算和即可。
- 计算入度相当慢,需要把所有的链表遍历,除非维护一个逆向邻接表。
邻接矩阵和邻接表是典型的空间和时间的案例,用空间换时间,或者用时间换空间。
4.2 图的遍历
- 深度优先(DFS): 类似树的前序遍历
- 广度优先(BFS): 类似树的层次遍历
| 场景特征 | 选哪个算法? | 为什么? |
|---|---|---|
| 求最短路径、最少步数 | BFS (广度) | 它是一圈圈扩散的,最先摸到的目标肯定最近。 |
| 求这一步之后有多少种可能 | DFS (深度) | 它适合把一种可能性走到黑,不行再换一种。 |
| 判断两个点连不连通 | DFS/BFS 都可以 | 只要能走到就行,无所谓远近。但写 DFS 代码(递归)通常更短更简单。 |
| 社交网络好友推荐 | BFS (广度) | 由近及远,先找一度好友,再找二度好友。 |
| 解决数独、八皇后问题 | DFS (深度) | 需要尝试放一个数字,如果不冲突就继续放下一个,冲突了就回退(回溯)。 |
三、数据运算
1. 查找
1.1 顺序查找
- 定义:最基础的查找方式,从头到尾一个一个比对。
- 核心原理:暴力遍历。不管数据有没有顺序,挨个问:"你是那个数吗?"
- 时间复杂度 : O ( n ) O(n) O(n) (最坏情况要找遍所有人)。
- 优点:算法简单,对数据没有任何要求(有序无序皆可),适合链表。
- 缺点:效率低,数据量大时非常慢。
- 应用场景:数据量较少,或者数据完全无序且只查一次的情况。
1.2 二分查找
- 定义:也叫折半查找,在有序序列中,每次都拿中间的数来比对,排除掉一半的可能性。
- 核心原理 :分治法。
- 比中间小?去左边找。
- 比中间大?去右边找。
- 时间复杂度 : O ( l o g 2 n ) O(log_2n) O(log2n) (速度极快,找100万个数最多只需比对20次)。
- 优点:查找效率非常高。
- 缺点 :前提
必须是有序数组。如果为了查找而去专门做一次排序,成本可能划不来;不适合频繁插入删除的数据(维护有序性成本高)。 - 应用场景:静态的、已排序的大量数据(如字典查字、图书馆索书号)。
1.3 哈希查找
- 定义:通过一个数学公式(哈希函数),直接算出数据应该存放的地址。
- 核心原理:地址映射。地址 = f(关键字)。
- 时间复杂度 :理想情况下为 O ( 1 ) O(1) O(1) (一次命中)。
- 优点:查找速度最快,几乎不需要比较。
- 缺点 :需要额外的存储空间(
空间换时间);可能会产生"冲突";数据是无序的。 - 应用场景:需要极速查找的系统,如缓存系统(Redis)、数据库索引、身份证查询。
2. 排序
2.1 第一梯队(简单排序)
(1)直接插入排序
- 核心原理 :摸扑克牌。
- 左手里手牌是有序的,右手摸一张新牌,插到左手牌中合适的位置。
- 最好情况 :数据本身就是
有序的(只需要比较,不需要移动),效率极高 O ( n ) O(n) O(n)。 - 稳定性:稳定。
- 考点:当数据基本有序时,它是最快的排序方法。
(2)冒泡排序
📝 最基础的排序,不多说了
- 核心原理 :水中气泡上浮。
两两比较,大的往后移。每一轮循环,最大的那个数就像气泡一样浮到了最后面。 - 稳定性:稳定。
- 考点:最基础,效率一般,但如果一轮比较下来没有发生交换,可以提前结束(优化点)。
(3)简单选择排序
- 核心原理 :挑苹果。
- 第一次从一堆里挑出最小的,放在第一个位置;第二次从剩下的里面挑最小的,放第二个位置......
- 稳定性 :不稳定(⚠️重点)。
- 例子:5, 8, 5, 2,第一轮会把第一个 5 和 2 交换,导致第一个 5 跑到了第二个 5 的后面,破坏了原有的顺序。
- 考点 :无论数据烂不烂,它都要比较 n ( n − 1 ) / 2 n(n−1)/2 n(n−1)/2 次,它是表现最稳定的"慢"(也就是最好最坏都是 O ( n 2 ) O(n^2) O(n2)
2.2 第二梯队(进阶排序)
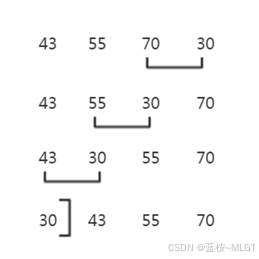
(4)快速排序
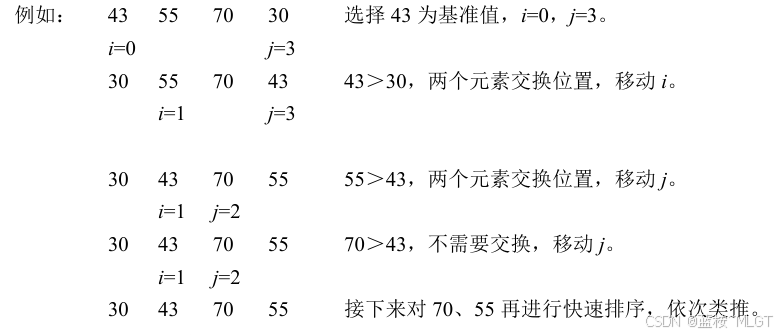
- 核心原理 :
分治法 + 基准兵。- 随便找个"基准数"(Pivot,比如第一个数)。
- 把比它小的都扔左边,比它大的都扔右边。
- 然后对左边和右边分别再做同样的事(递归)。
- 优缺点 :
- 优点 :
平均速度最快。 - 缺点 :不稳定。最坏情况(数据本身倒序)会退化成冒泡排序 O ( n 2 ) O(n^2) O(n2)
- 优点 :
- 考点:它是所有同数量级排序中,平均性能最好的。但它对内存栈有消耗(递归)。
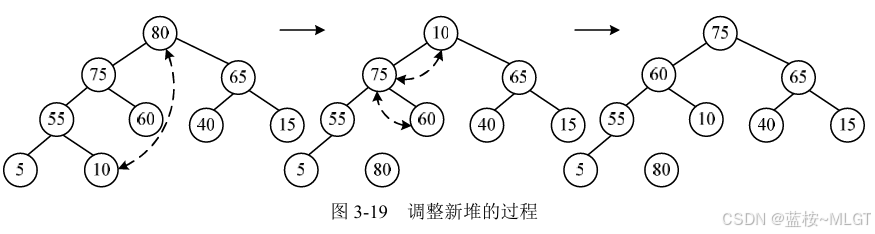
(5)堆排序
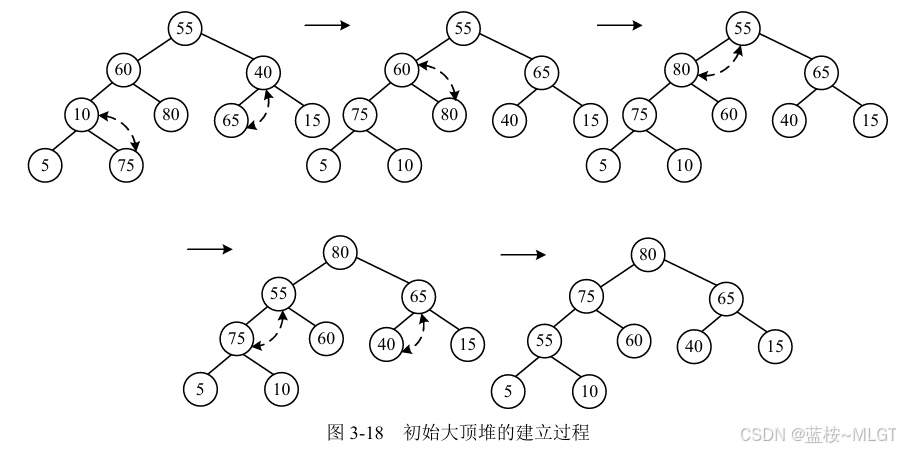
- 核心原理 :利用
完全二叉树。- 把数据构建成一个大顶堆(根节点最大)。
- 把堆顶(最大值)和末尾元素交换,排除末尾,剩下的重新建堆。
- 优缺点 :
- 优点 :空间复杂度 O ( 1 ) O(1) O(1),不需要额外内存。
- 缺点:不稳定。
- 考点 :适合求 "前 K 个最大/最小值" 的问题(Top K 问题)。
(6)归并排序
- 核心原理 :分而治之 + 合并。
- 把数组从中砍断,一分为二,二分为四......直到切成单个元素。
- 然后两两有序合并:1,3 和 2,4 合并成 1,2,3,4。
- 优缺点 :
- 优点 :稳定(这是它比快排和堆排强的点)。效率非常稳定,永远是 O ( n l o g n ) O(nlogn) O(nlogn)
- 缺点 :
费空间。需要一个和原数组一样大的辅助空间 O ( n ) O(n) O(n)
- 考点 :
空间换时间的典型代表。
2.3 特殊排序
(7)希尔排序
- 核心原理 :缩量增量 + 插入排序。
- 它是插入排序的升级版。
- 先按间隔 5 分组排序,再按间隔 3 分组排序,最后按间隔 1 排序。让数据宏观上先有序,最后微调。
- 时间复杂度 :突破了 O ( n 2 ) O(n^2) O(n2) 的界限,平均约 O ( n 1.3 ) O(n^{1.3}) O(n1.3)。
- 稳定性:不稳定(因为跳着交换)。
- 考点 :它是第一个突破 O ( n 2 ) O(n^2) O(n2) 限制的排序算法。
2.4 总结
| 排序算法 | 平均时间 | 最坏时间 | 空间复杂度 | 稳定性 | 口诀/特征 |
|---|---|---|---|---|---|
| 冒泡 | O(n²) | O(n²) | O(1) | ✅ 稳定 | 两两交换,大数上浮 |
| 插入 | O(n²) | O(n²) | O(1) | ✅ 稳定 | 基本有序时最快 |
| 选择 | O(n²) | O(n²) | O(1) | ❌ 不稳定 | 最好最坏都很慢 |
| 希尔 | O(n¹·³) | O(n²) | O(1) | ❌ 不稳定 | 跳跃式插入 |
| 快排 | O(n log n) | O(n²) | O(log n) | ❌ 不稳定 | 平均性能最强 |
| 堆排 | O(n log n) | O(n log n) | O(1) | ❌ 不稳定 | 适合 TopK,省空间 |
| 归并 | O(n log n) | O(n log n) | O(n) | ✅ 稳定 | 费空间,效率稳 |