文末联系小编,获取项目源码
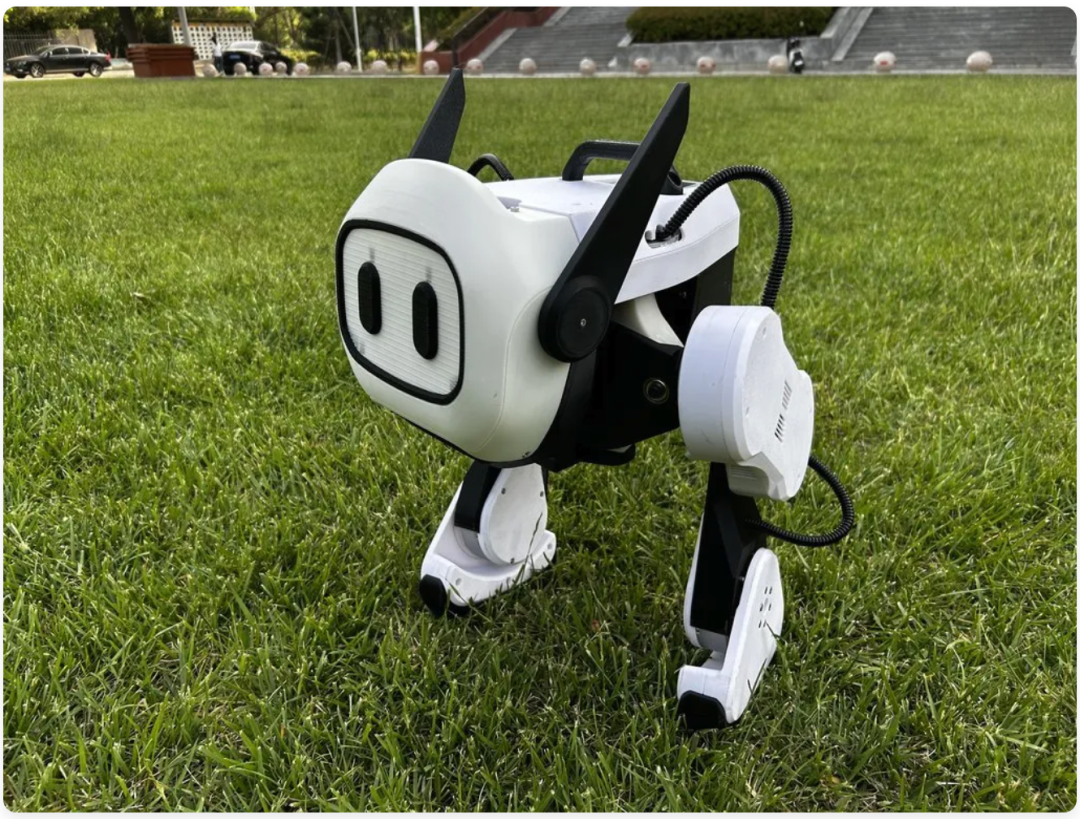
宇树 Qmini 是一款由宇树科技设计并开源的低成本双足机器人,拥有完整的硬件BOM清单、电气系统框图、3D结构的STEP文件、装配SOP、URDF模型和基础控制软件,适合业余爱好者、教育工作者和研究人员使用。
Qmini 机器人组装过程简单,个人开发者可以完全通过 3D 打印进行复刻,并以类似乐高的模块化方式组装自己的机器人,3-5小时即可完成。该项目为机器人技术提供了一个便捷且经济的切入点,加速创新,并为全球机器人生态系统的发展做出贡献。
Qmini 秉承"优秀工具应该易于使用"的理念,在构建时充分考虑了简洁性和成本效益,以树莓派4B(Raspberry Pi 4 Model B)作为默认主控板,机器人核心骨骼、四肢部件可以通过3D打印来制造,告别复杂机械加工;另外最关键的是开源的较为彻底从机械到驱动算法全公开;虽然编程技术门槛有一些,但相较于其他开源项目,代码结构清晰比较友好。

01
Qmini 双足机器人架构方案
Hardware: 硬件:
• 提供完整的物料清单(BOM)
• 提供电气系统框图
• 提供 DIY 制作说明
机械结构:
• 提供所有机械部件的 STEP 文件
• 提供装配 SOP(标准操作程序)
Software: 软件:
• URDF 模型
• 核心软件堆栈 RoboTamer4Qmini
结构设计
头部设计
树莓派位于头部后方,负责整个机器人的控制和数据处理。头部设计简洁,两个4010风扇为树莓派提供散热,确保其在长时间运行时的稳定性。
腿部结构
每条腿有5个自由度,包括髋关节的俯仰、侧摆和旋转,以及膝关节的俯仰和踝关节的俯仰。侧摆关节使用了齿轮来放大力矩,这种结构将侧摆运动的旋转轴线放到了身体外侧,减少了结构对其自由度的限制,提高了机器人的灵活性和稳定性。部分腿的关节设有限位,以防止过度运动导致损坏。
电池与配重
电池位于尾部,类似于恐龙等动物使用粗壮的尾巴做配重,这种设计有助于平衡机器人的前后重量,提高行走稳定性。提手的位置设计合理,便于搬运和调试。
散热设计
除了头部的两个4010风扇外,大腿内部还有两个3010离心风扇安装位,这种多风扇设计确保了机器人在高负荷运行时的散热效果。
3D打印物料
得益于全面的开源资源,开发者可以轻松获取所有必需的组件。Qmini 的所有机械结构均可 3D 打印,几乎无需定制加工。机身主体零部件打印参数建议如下表所示。
Qmini 机器人集成了 11 个 Unitree 8010 电机 ------ 这是一种经过验证的执行器,可用于各种商业机器人平台。其中:
• 10 个电机驱动机器人的主要运动系统
• 1 个电机 位于机器人颈部,作为定制扩展预留
这种模块化鼓励开发者设计和制作自己的扩展原型,增强 Qmini 机器人的功能、美观性或交互性。
机身主体零部件打印参数建议如下表所示。
| 零件 | 材质 | 墙层数 | 顶部壳体层数 | 底部壳体层数 | 稀疏填充密度 | 稀疏填充图案 |
|---|---|---|---|---|---|---|
| 机身顶部主架 | PLA | 4 | 4 | 4 | 20 | 蜂窝 |
| 机体主骨架 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 机体前端风扇安装件 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 电池仓 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 电池底部支撑件 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 腿部 yaw 轴限位块 | PLA | 5 | 5 | 5 | 20 | 蜂窝 |
| 顶部 yaw 轴电机安装座 | PLA | 4 | 4 | 4 | 20 | 蜂窝 |
| 顶部陀螺仪安装座 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |
| 树莓派安装座 | PLA | 3 | 3 | 3 | 15 | 网格/蜂窝 |

02
Qmini 双足机器人核心系统
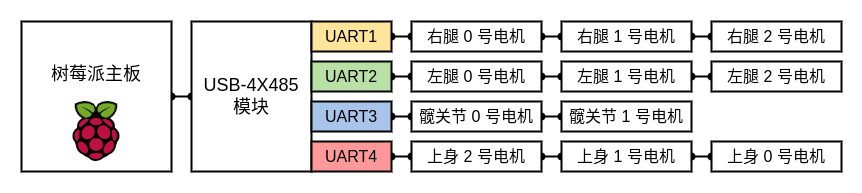 Qmini 机器人的电机通讯线由树莓派主板 USB3.0 接口经 Type-A 转 Type-C,接入 485 转接板。
Qmini 机器人的电机通讯线由树莓派主板 USB3.0 接口经 Type-A 转 Type-C,接入 485 转接板。
-
转接板 UART1 接出 485A/B 双绞,至右腿 0 号电机,右腿 0 至右腿 1 号电机,右腿 1 至右腿 2 号电机,形成 USB 总线 UART1。
-
转接板 UART2 接出 485A/B 双绞,至左腿 0,左腿 0 号电机至左腿 1 号电机,左腿 1 号电机至左腿 2 号电机,形成 USB 总线 UART2。
-
转接板 UART3 接出 485A/B 双绞,至髋关节 0 号电机, 髋关节 0 号电机至髋关节 1 号电机,形成 USB 总线 UART3。
-
转接板 UART4 接出 485A/B 双绞,至上身 2 号电机; 上身 2 号电机至上 1, 上身 1 号电机至上身 0 号电机,形成 USB 总线 UART4。
- 发板散热风扇电源由开发板 GPIO2(正极 5V)和 GPIO14(GND)引脚输出 5V 对外供电。
软件系统安装
宇树已经帮我们准备好了现成的程序,我们只需要按步骤配置就行。就像给电脑装系统一样简单,但结果却是让你的机器人活过来!
树莓派烧录系统镜像:
apache
# 下载Raspberry Pi OS Lite# 使用Raspberry Pi Imager烧录到SD卡# 启动前在boot分区创建ssh文件(开启SSH)基础环境配置:
bash
# 更新系统sudo apt update && sudo apt upgrade -y# 安装Python依赖sudo apt install python3-pip python3-numpy python3-scipy -y# 安装开发工具sudo apt install git cmake build-essential -y下载控制程序:
bash
# 克隆官方控制代码git clone https://github.com/vsislab/RoboTamer4Qmini.gitcd RoboTamer4Qmini# 安装Python依赖包pip3 install -r requirements.txt控制程序主要由运动学计算(计算每个关节应该转多少度)、步态生成(规划走路的动作序列)、平衡控制(保持机器人不摔倒)组成。
URDF模型加载:
bash
# URDF文件定义了机器人的结构# 从GitHub下载:urdf/Qmini.urdf# 这个文件描述了每个关节的位置和运动范围cp urdf/Qmini.urdf ~/robot_ws/src/qmini_description/urdf/联机调试
Qmini采用了VSISLab团队开发的先进控制框架---RoboTamer4Qmini项目。这套系统基于Isaac Gym仿真环境,使用PPO深度强化学习算法训练机器人步态控制策略。相比传统的手工编程方式,这种AI驱动的方法让机器人能够自主学习优化的行走模式。
终于到了最激动人心的时刻!
每条腿的5个关节都经过精确建模,比如髋关节yaw轴的活动范围设定为-0.349到0.525弧度,这个数值既保证步态灵活性,又避免机械干涉。
实际部署的技术流程:
项目提供了完整的开发工具链,虽然环境配置相对复杂(需要Ubuntu、CUDA 11.4+、Isaac Gym等),但一旦搭建完成,训练和部署过程非常直观:
css
# 训练新的控制策略python train.py --config BIRL --name qmini_experiment# 评估训练效果python play.py --render --name qmini_experiment --time 10# 导出部署模型python export_pt2onnx.py --name qmini_experiment工程调优的实际考量
虽然核心控制基于深度学习,但底层电机控制仍需要精确的工程调优。
项目提供了PID参数优化工具,帮助减小仿真与实际机器人行为之间的差异:
nginx
# 优化底层控制参数python tune_pid.py --mode real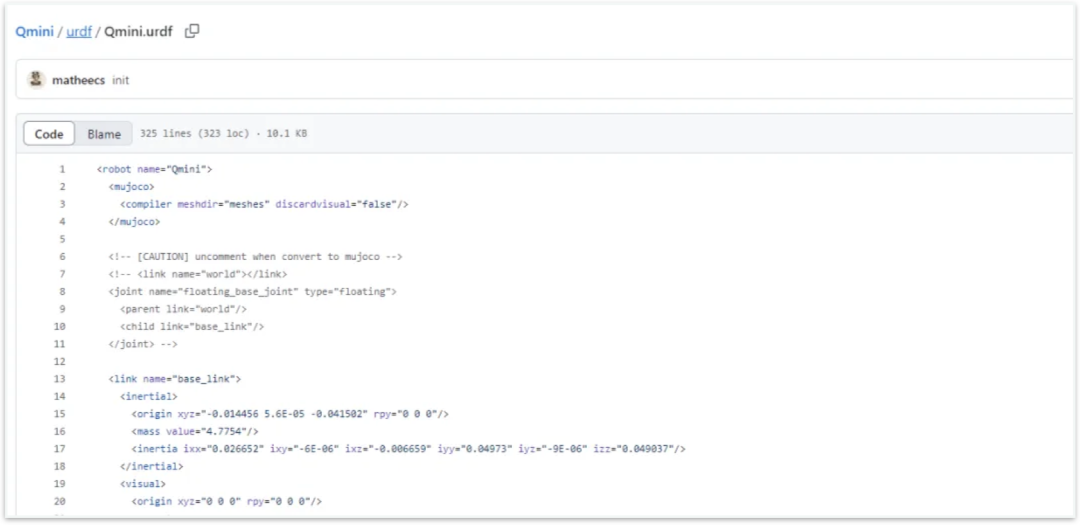
03
Qmini双足机器人项目源码

百度网盘:
https://pan.baidu.com/s/1XQFXGYlf6ZAf1rpxIvGYEg?pwd=iotw
提取码: iotw
如有IoT 源码采购和项目交付需求,请扫码联系小编,微信号: beacon0418




往期推荐
☞开箱即用!国产开源30+AI视觉算法IoT智能物联网云平台
☞国产开源Web 工业IoT组态软件,支持Modbus、OPC,支持拖拉拽
☞4万元,国产信创私有化部署,破解县域无人机AI巡检平台落地难题


**免责声明:**本公众号所发布的内容来源于互联网,我们会尊重并维护原作者的权益。由于信息来源众多,若文章内容出现版权问题,或文中使用的图片、资料、下载链接等,如涉及侵权,请告知我们,我们将尽快处理。