在计算机视觉领域,边缘检测是基础且核心的任务之一------它通过识别图像中灰度值突变的区域,勾勒出物体的轮廓,为后续的目标识别、图像分割、特征提取等任务奠定基础。本文将详细拆解四种最常用的边缘检测算法:Sobel、Scharr、Laplacian 和 Canny,从原理、实操代码到适用场景逐一分析,帮你快速掌握不同算法的核心逻辑与使用技巧。
一、基础入门:Sobel 算子(一阶导数的经典应用)
1. 核心原理
Sobel 算子是基于一阶导数的边缘检测算法,核心思想是:图像边缘区域的灰度值变化剧烈,一阶导数会在此处出现峰值。它通过两个 3×3 的卷积核(分别对应 x 方向和 y 方向)对图像进行卷积(以卷积核作为窗口,在图像上进行滑动,计算每个像素值的加权差分)运算,计算出两个方向的梯度强度,最终融合得到完整边缘。
这里我们说的一阶导数实质上指的是差分(像素右边值减去左边值代替中心点像素值),Sobel 用3×3 邻域的加权差分来近似一阶偏导数,描述图像灰度值的变化率,在图像的边缘区域,变化率会出现峰值。
常用卷积核:
x 方向(检测垂直边缘):
\[ -1, 0, 1 ,
-2, 0, 2 ,
-1, 0, 1 \]
y 方向(检测水平边缘):
\[ -1, -2, -1 ,
0, 0, 0 ,
1, 2, 1 \]
2. OpenCV 实操代码
python
import cv2
# 读取图像观看效果 sobel算子
zl = cv2.imread('img_3.png') # 不用灰度试试效果
zl_x_64 = cv2.Sobel(zl, cv2.CV_64F, 1, 0) # 默认int8改为float64,可保存负数
zl_x_full = cv2.convertScaleAbs(zl_x_64) # 转换为绝对值,负数转换为正数
zl_y_64 = cv2.Sobel(zl, cv2.CV_64F, 0, 1) # 默认int8改为float64,可保存负数
zl_y_full = cv2.convertScaleAbs(zl_y_64) # 转换为绝对值,负数转换为正数
zl_xy_sobel_full = cv2.addWeighted(zl_x_full, 1, zl_y_full, 1, 0)
...
cv2.imshow('zl_xy_sobel_full', zl_xy_sobel_full)
cv2.waitKey(0)运行结果: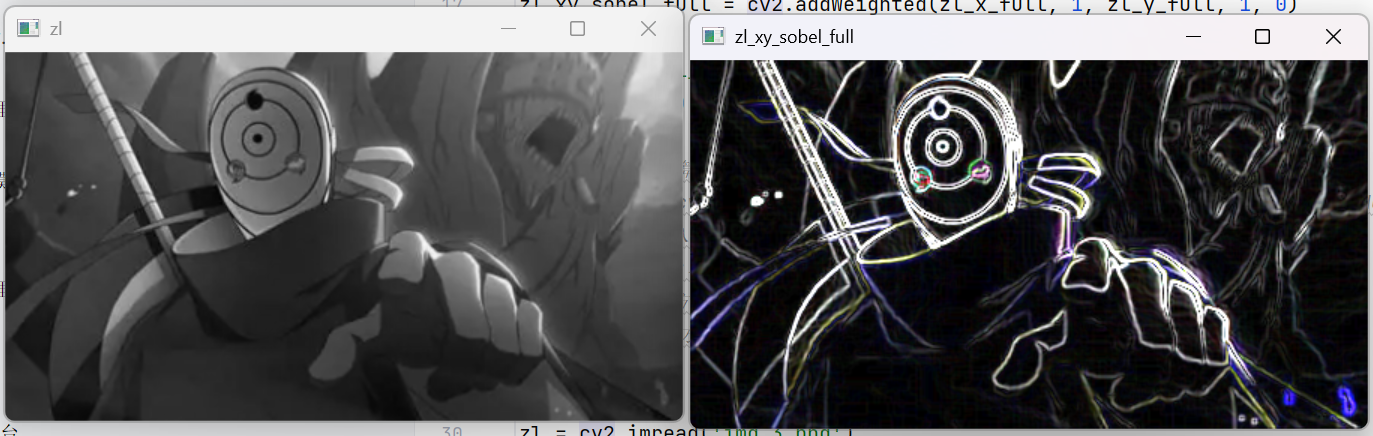
3. 核心特点与适用场景
优点:计算效率高,对噪声有一定抑制能力,容易理解和实现; 缺点:边缘检测精度中等,3×3 卷积核存在轻微误差,边缘线条较粗; 适用场景:对精度要求不高的快速边缘检测,如简单物体轮廓提取、实时视频流的初步处理。
二、精度提升:Scharr 算子(Sobel 的优化版)
1. 核心原理
Scharr 算子是 Sobel 算子的高精度升级版,原理与 Sobel 完全一致(同样计算一阶导数),核心优化点是调整了卷积核的权重,放大了像素间的灰度差异,从而提升边缘检测的精度,尤其在 3×3 卷积核尺寸下,误差远小于 Sobel。
常用卷积核:
x 方向(检测垂直边缘): \[ -3, 0, 3 , -10, 0, 10 , -3, 0, 3 ]
y 方向(检测水平边缘): \[ -3, -10, -3 , 0, 0, 0 , 3, 10, 3 ]
2. OpenCV 实操代码
python
# Scharr 算子
zl = cv2.imread('img_3.png')
# zl=cv2.cvtColor(zl,cv2.COLOR_BGR2GRAY)
zl_x_64 = cv2.Scharr(zl, cv2.CV_64F, 1, 0) # 默认int8改为float64,可保存负数
zl_x_full = cv2.convertScaleAbs(zl_x_64) # 转换为绝对值,负数转换为正数
zl_y_64 = cv2.Scharr(zl, cv2.CV_64F, 0, 1) # 默认int8改为float64,可保存负数
zl_y_full = cv2.convertScaleAbs(zl_y_64) # 转换为绝对值,负数转换为正数
zl_xy_Scharr_full = cv2.addWeighted(zl_x_full, 1, zl_y_full, 1, 0)
cv2.imshow('zl_xy_Scharr_full', zl_xy_Scharr_full)
cv2.waitKey(0)运行结果: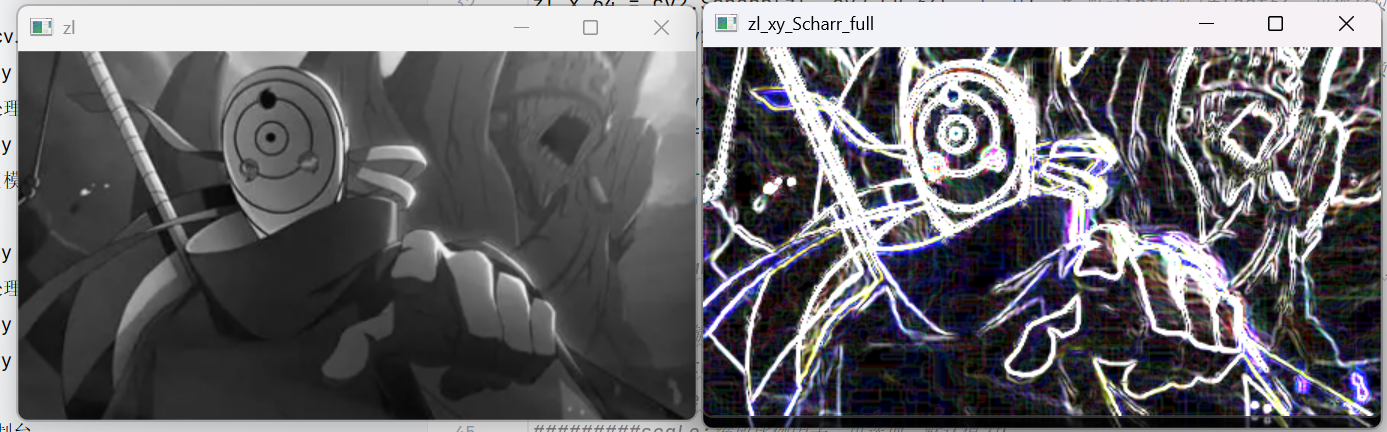
3. 核心特点与适用场景
优点:精度高于 Sobel,计算效率与 Sobel 基本持平,同样支持方向区分; 缺点:边缘线条仍偏粗,不支持大于 3×3 的卷积核; 适用场景:需要高精度一阶边缘检测的场景,如医学图像的边缘提取、工业零件的精细轮廓检测。
三、精细边缘:Laplacian 算子(二阶导数的独特价值)
1. 核心原理
Laplacian 算子与前两种算法不同,它基于二阶导数,核心思想是:边缘区域的灰度变化率(一阶导数)会发生突变,二阶导数会在此处出现"零交叉点"(从正变负或负变正),通过检测零交叉点即可定位边缘。
同样的,在图像实际计算中,我们用二阶差分代替二阶导数,(原理:一阶差分是 "I(x+1,y)−I(x,y)",二阶差分是 "一阶差分的差分",即 I(x+1,y)−I(x,y)−I(x,y)−I(x−1,y),化简后就是上面的式子),转换成卷积核就是下面这样:
它是各向同性算子(对所有方向的边缘检测效果一致),常用 3×3 卷积核有两种:
4 邻域核(仅考虑上下左右): \[ 0, 1, 0 , 1, -4, 1 , 0, 1, 0 ]
8 邻域核(考虑所有相邻像素): \[ 1, 1, 1 , 1, -8, 1 , 1, 1, 1 ]
⚠️ 关键提醒:二阶导数对噪声极其敏感,会放大图像中的噪点,因此使用 Laplacian 前必须先进行降噪处理(如高斯模糊)。
2. OpenCV 实操代码
python
# cv2.Laplacian相关调用
zl = cv2.imread('img_3.png', cv2.IMREAD_GRAYSCALE)
zl_lap = cv2.Laplacian(zl, cv2.CV_64F, ksize=3)
zl_lap_full = cv2.convertScaleAbs(zl_lap)#转换为绝对值,负数转换为正数
cv2.imshow('zl_lap_full', zl_lap_full)
cv2.waitKey(0)运行结果: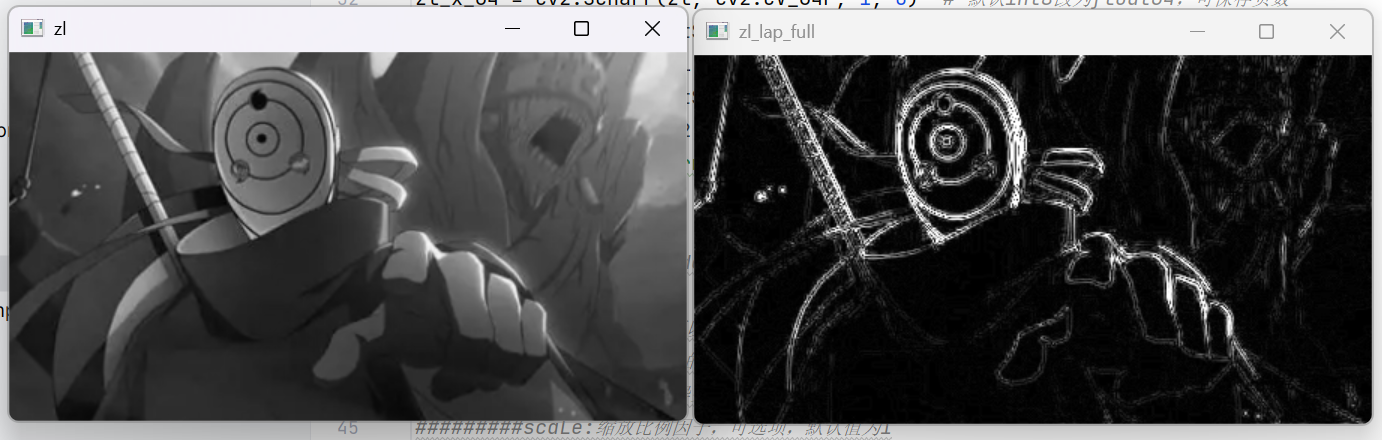
3. 核心特点与适用场景
优点:边缘线条极细,各向同性检测效果均匀,适合精细边缘定位; 缺点:对噪声敏感,必须先降噪,边缘连续性较差; 适用场景:需要精准定位边缘的场景,如图像锐化、微小物体边缘检测、医学影像(如 CT 图像)的细节提取。
四、工业首选:Canny 算子(多阶段的最优解)
Canny 算子并非单一卷积核,而是一套多阶段的边缘检测流程,由 John F. Canny 于 1986 年提出,凭借精准、连续、伪边缘少的优势,成为工业界最常用的边缘检测方案。
1. 核心原理(5 步流水线)
-
高斯模糊降噪:先通过高斯滤波抑制噪声,避免噪点被误判为边缘;
-
计算梯度:用 Sobel 算子计算图像的梯度强度和方向,筛选出边缘候选像素;
-
非极大值抑制:只保留梯度方向上的局部最大值像素,将粗边缘"细化"为单像素线条;
-
双阈值筛选:用两个阈值(低阈值/高阈值)区分强边缘、弱边缘和非边缘: - 高于高阈值:强边缘(直接保留); - 低于低阈值:非边缘(直接剔除); - 介于两者之间:弱边缘(仅与强边缘相连时保留);
-
边缘连接:将相连的弱边缘合并到强边缘中,得到完整、连续的边缘。
2. OpenCV 实操代码
python
# canny边缘检测
# cv.Canny( image, threshold1, threshold2[, apertureSize[, L2gradient]] )
zl = cv2.imread('img_3.png', cv2.IMREAD_GRAYSCALE)
cv2.imshow('zl', zl)
cv2.waitKey(0)
zl_canny = cv2.Canny(zl, 150, 250)#低,高
cv2.imshow('zl_canny', zl_canny)
cv2.waitKey(0)运行结果: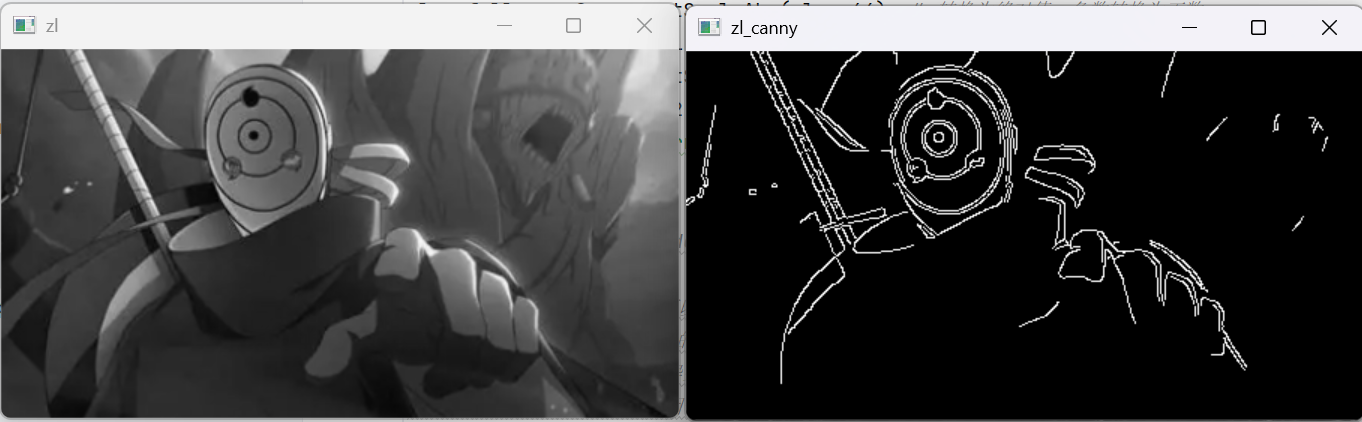
3. 核心特点与适用场景
优点:边缘精准、连续,伪边缘少,自带降噪机制,鲁棒性强; 缺点:计算步骤多,效率略低于 Sobel/Scharr; 适用场景:工业级边缘检测任务,如产品缺陷检测、自动驾驶中的道路边缘识别、高精度目标轮廓提取。
五、四种算法核心对比与选择指南
| 算法 | 导数阶数 | 核心优势 | 核心缺点 | 适用场景 |
|---|---|---|---|---|
| Sobel | 一阶 | 效率高、易实现、抗噪一般 | 精度中等、边缘粗 | 快速边缘检测、实时视频初步处理 |
| Scharr | 一阶 | 精度高于 Sobel、效率接近 | 边缘仍偏粗、不支持大核 | 高精度一阶边缘、医学图像提取 |
| Laplacian | 二阶 | 边缘极细、各向同性 | 对噪声敏感、需先降噪 | 精细边缘定位、图像锐化 |
| Canny | 一阶(多阶段) | 精准连续、伪边缘少、鲁棒性强 | 效率略低、参数需调优 | 工业级检测、高精度目标识别 |
六、实操关键技巧总结
-
数据类型选择:计算梯度时优先用
cv2.CV_64F,保留负数梯度,再用convertScaleAbs转绝对值,避免信息丢失; -
降噪优先级:Laplacian 必须先降噪;Canny 噪声多时需降噪;Sobel/Scharr 噪声少可省略;
-
参数调优经验:Canny 双阈值遵循"高阈值≈低阈值×1.5~2";卷积核尺寸均为奇数,默认 3 即可;
-
方向需求:需区分水平/垂直边缘选 Sobel/Scharr;需全方向均匀检测选 Laplacian/Canny。
结语
四种边缘检测算法各有侧重:Sobel 胜在效率,Scharr 赢在精度,Laplacian 强在精细,Canny 优在综合性能。实际开发中,无需盲目追求"最优算法",而是要根据项目的精度要求、效率限制、噪声情况选择合适的方案------比如快速原型验证用 Sobel,工业落地用 Canny,精细边缘定位用 Laplacian(配合降噪)。希望本文能帮你理清四种算法的核心逻辑,快速应用到实际项目中!