艾默生充电15kw+台达三相PFC源程序 艾默生充电桩15kw模块+台达三相PFC源码,软件源码加原理 图BOM 艾默生充电桩15kw模块原版软件源码含核心算法,PFC+DCDC双DSP数字控制,原理图,BOM和PCB(PDF版),所有资料完全配套,确保资料真实

最近在研究充电桩相关技术,发现了一套超有意思的资料------艾默生15kW充电桩模块与台达三相PFC源程序,今天就来和大家分享一下。
艾默生15kW充电桩模块的魅力
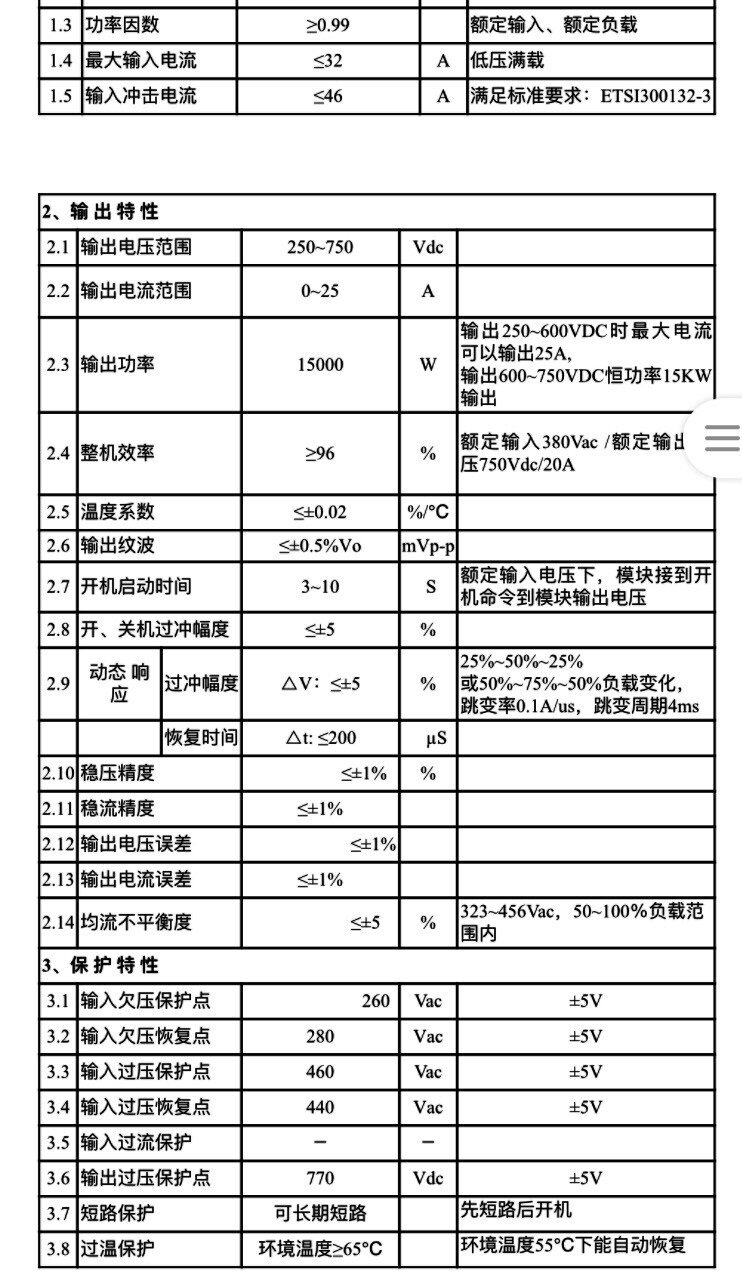
艾默生这款15kW充电桩模块可是有着独特的优势。其采用PFC + DCDC双DSP数字控制,这种控制方式极大地提升了充电效率和稳定性。想象一下,双DSP就如同两个精明的指挥官,各自负责不同的关键任务,协同合作让整个充电过程有条不紊。
原理图的奥秘
先来看原理图,它就像是整个系统的地图,指引着我们了解电流的走向和各个部件的协同工作。在原理图中,可以清晰看到PFC电路和DCDC电路的布局与连接。PFC电路主要负责功率因数校正,让输入电流更加接近正弦波,减少谐波污染,提高电能的利用率。而DCDC电路则专注于电压的转换,将输入电压精准地调整到适合给电池充电的电压值。
BOM与PCB(PDF版)的价值
BOM(物料清单)详细列出了构成这个充电桩模块所需的所有零部件,从电阻电容到芯片集成电路,每一个都标注得清清楚楚。这对于想要深入研究或者自行搭建类似系统的朋友来说,是极其重要的参考。而PDF版的PCB文件,则直观地展示了电路板的设计布局,包括线路走向、元件摆放位置等,为实际的硬件制作提供了精确的蓝图。
台达三相PFC源程序探秘
再说说台达三相PFC源程序,它可是整个功率因数校正环节的核心代码。下面咱们来看一段简化后的示例代码(仅为示意,实际代码会更复杂):
c
// 定义一些常量和变量
#define PI 3.1415926
float voltage[3];
float current[3];
float theta;
// 计算功率因数的函数
float calculatePF() {
// 这里假设已经获取到了三相电压和电流的值
// 实际应用中需要从传感器等设备读取
for (int i = 0; i < 3; i++) {
// 这里只是简单模拟获取电压和电流值
voltage[i] = getVoltage(i);
current[i] = getCurrent(i);
}
// 计算相位差
theta = calculatePhaseDifference(voltage, current);
// 根据功率因数公式计算功率因数
float pf = cos(theta);
return pf;
}在这段代码中,首先定义了一些常量和变量,用于存储三相电压、电流以及相位差。calculatePF函数负责计算功率因数,它先通过模拟的getVoltage和getCurrent函数获取三相电压和电流值(实际应用中这些值需要从传感器实时读取),然后计算出相位差theta,最后根据功率因数的定义公式cos(theta)计算出功率因数并返回。通过这样的代码逻辑,就能实时监测和调整功率因数,确保电能的高效利用。
这套艾默生15kW充电桩模块加台达三相PFC的源码、原理图、BOM和PCB资料完全配套,对于充电桩技术爱好者、研究人员以及相关从业人员来说,都是非常宝贵的资源,能助力我们更深入地理解和探索充电桩领域的技术奥秘。希望今天的分享能让大家对这一领域有更浓厚的兴趣和更深入的认识。