协因数、协因数阵与权阵详解
这三个概念是测量平差中处理不同精度观测值 和相对精度的核心工具,构成了完整的平差权重体系。
1. 基本概念与定义
1.1 单位权方差 (σ₀²)
-
定义 :一个参考基准的方差值,用于统一量纲和比较不同观测值的精度
-
作用:相当于"精度货币的汇率",将不同量纲、不同绝对精度的观测值统一到同一尺度
-
选择:通常选择某一类典型观测值的方差作为单位权方差
- GNSS示例:可选择高度角为45°的卫星伪距观测值的方差作为σ₀²
1.2 协因数 (Cofactor) Qᵢᵢ
-
定义:观测值方差相对于单位权方差的比值
-
性质:
-
无量纲,纯数值
-
描述观测值的相对精度
-
Qᵢᵢ越大,表示该观测值相对于基准的精度越低
-
1.3 协因数阵 Q
-
定义 :观测值向量L 的方差-协方差阵D与单位权方差σ₀²的比值
-
物理意义 :描述观测值之间相对精度和相对相关性的矩阵
1.4 权阵 P
-
定义:协因数阵的逆矩阵
2. 三者的关系与转换
除以σ₀²
取倒数
组成矩阵
除以σ₀²
求逆
观测值方差σ²
协因数Q
权P
方差-协方差阵D
协因数阵Q
权阵P
数学关系总结:
3. 在平差中的核心作用
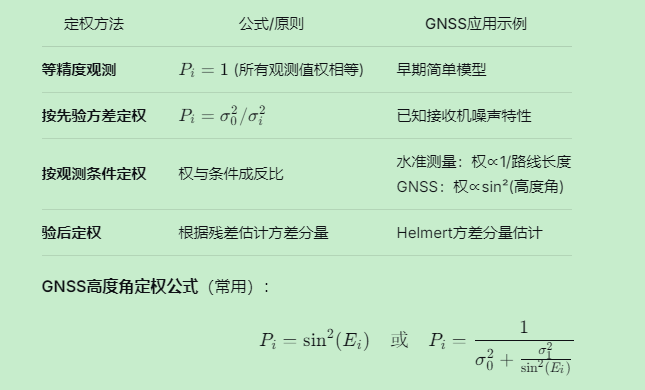
3.1 定权 (Weight Determination)
确定观测值的权重是平差的第一步,常见方法:
 |
|---|
其中E为卫星高度角,σ₀²为与高度角无关的误差,σ₁²为与高度角相关的误差。
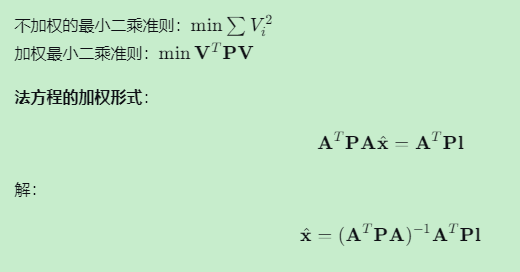
3.2 最小二乘准则的加权形式
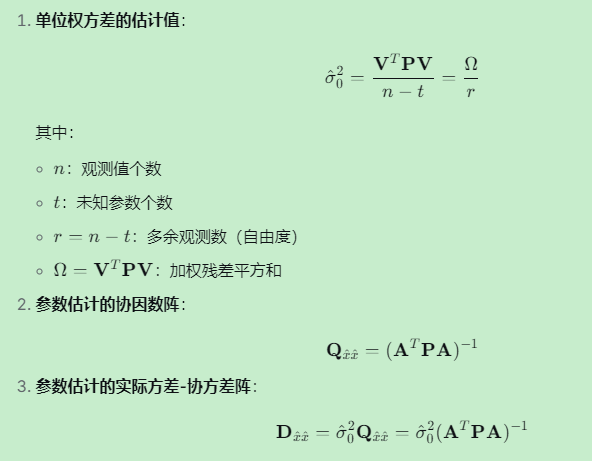
3.3 精度评定
4. 协因数传播律
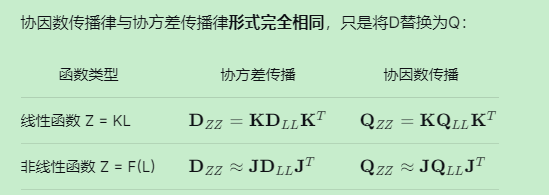
重要特性:协因数传播不依赖于σ₀²,只涉及相对关系。
5. AGNSS中的实际应用
5.1 观测值权的确定策略
# GNSS观测值定权的简化示例(概念性代码)
def calculate_gnss_weights(elevations, snrs, obs_types):
"""
计算GNSS观测值的权
:param elevations: 卫星高度角列表(度)
:param snrs: 信噪比列表(dB-Hz)
:param obs_types: 观测值类型列表('C'伪距/'L'载波相位)
:return: 权向量
"""
weights = []
for elev, snr, obs_type in zip(elevations, snrs, obs_types):
# 1. 高度角因子
if elev < 5: # 高度角过低
w_elev = 0.0 # 直接剔除
else:
w_elev = np.sin(np.radians(elev))**2
# 2. 信噪比因子(简化模型)
w_snr = 1.0 / (1.0 + 10**(-0.1*(snr-40))) # SNR在40dB-Hz附近变化敏感
# 3. 观测值类型因子
if obs_type == 'L': # 载波相位
w_type = 10000.0 # 相位权远大于伪距
else: # 伪距
w_type = 1.0
# 综合权重
weight = w_elev * w_snr * w_type
weights.append(weight)
return np.diag(weights) # 返回对角权阵5.2 不同观测值的权比设置
在GNSS中,不同观测值类型的权比至关重要:
-
伪距 vs 载波相位:通常相位权是伪距权的10⁴~10⁶倍
-
不同频率观测值:L1、L2、L5频率观测值可能有不同噪声特性
-
不同卫星系统:GPS、GLONASS、BDS、Galileo可能有系统间偏差
5.3 相关观测值的权阵(非对角权阵)
当观测值相关时,权阵P为非对角阵:
-
时间相关:相邻历元的观测值可能相关(特别是高频采样)
-
频率相关:同一卫星不同频率的观测值受同一大气延迟影响
-
卫星间相关:通过同一接收机通道的观测值可能有相关噪声
示例:考虑时间相关的权阵
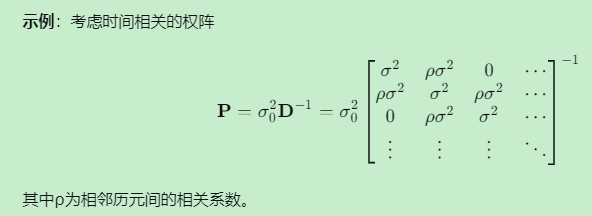
其中ρ为相邻历元间的相关系数。
6. 关键要点总结
-
协因数Q:相对精度指标,无量纲,Q越大精度越低
-
协因数阵Q:相对精度和相关性的完整描述,Q = D/σ₀²
-
权阵P:平差中使用的权重矩阵,P = Q⁻¹ = σ₀²D⁻¹
-
单位权方差σ₀²:精度统一的基准,平差后可估计
-
定权是平差的关键:合理的权阵能显著提高解算精度
-
协因数传播律:形式同协方差传播律,用于相对精度传播
7. 平差中的完整精度评定流程
观测值L → 先验方差σᵢ² → 协因数Qᵢᵢ = σᵢ²/σ₀² → 权阵P = Q⁻¹
↓
最小二乘平差 → 参数估值x̂ = (AᵀPA)⁻¹AᵀPL
↓
残差V = Ax̂ - L → 加权平方和Ω = VᵀPV
↓
单位权方差估值σ̂₀² = Ω/(n-t)
↓
参数协因数阵Q_x̂x̂ = (AᵀPA)⁻¹
↓
参数方差阵D_x̂x̂ = σ̂₀²·Q_x̂x̂
↓
参数中误差σ_x̂ = √diag(D_x̂x̂)掌握协因数、协因数阵和权阵的概念,就能深入理解平差中如何通过合理的权重分配来处理不同精度的观测值,从而获得最优的参数估计。这对于AGNSS服务器开发中设计高精度定位算法至关重要。